Oluwatobi Oyeshile | David A. Fadare![]() | Rasaq A. Kazeem
| Rasaq A. Kazeem![]() | Omolayo M. Ikumapayi*
| Omolayo M. Ikumapayi*![]() | Adedotun O. Adetunla
| Adedotun O. Adetunla![]() | Dorcas A. Fadare
| Dorcas A. Fadare![]() | Isaac O. Enobun | Adeyinka O.M. Adeoye
| Isaac O. Enobun | Adeyinka O.M. Adeoye![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Vertical farming is a method of cultivating crops in a controlled environment using a vertical farming rig. This rig automates, monitors, and controls the growing conditions, creating a microclimate that maximizes crop production. The steel cuboid enclosure, constructed with sustainable and locally sourced materials, benefits from the utilization of technical drawings and 3D modeling, ensuring precision and accuracy in its fabrication. The monitoring and control devices like the Raspberry PI Model B with other microcontrollers and IoT (Internet of Things) devices such as sensors and actuators are responsible for automating the vertical farm remotely. The intelligent camera plays a crucial role in a vertical farming system by capturing data and transmitting it to the microprocessor, enabling the optimization of operations within the vertical farm. Different crops, particularly those with fast growth rates responded differently to the vertical farm's automated system. Crop production on the vertical farm produced more growth from the sprouting stage to the seedling stage than traditional farming. The Nutrient Film Technique (NFT), a hydroponics method, was employed for the delivery of the water-nutrient solution containing NPK, ensuring optimal plant growth and maintenance. In comparison to traditional farming, the NFT approach utilized in the vertical farm produced higher levels of oxygen, good water-nutrient absorption, and cleaner crop yields. The results of this project demonstrate the potential for implementing low-cost, modular vertical farms in households, providing a sustainable and efficient means of crop production through advanced monitoring systems and mechanical drives.
vertical farming, hydroponics, crop production, internet of things, monitoring, sustainable agriculture, nutrient film technique
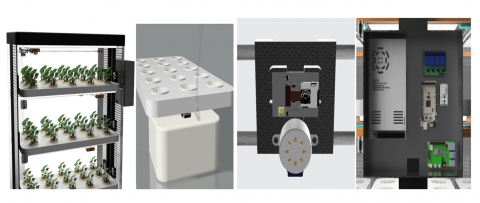
The increasing global population has led to a higher demand for food and agricultural products. Due to the scarcity of land for farming, it become more challenging to plant and provide as much food production in comparison to the growing population [1]. People also have to occupy the land primarily for business and shelter. Dixon [1] stated that to solve the problem of food scarcity, food per unit area has to be fully maximized. By 2050, the growing global population will require an estimated 60% more food than produced today. Nigeria is a major producer of food in Africa and a large percentage of farmers use traditional methods/techniques of farming to produce food there occupying large hectares of land. These methods are labour-intensive and time-consuming. However, the effect of climate change on traditional means of crop production serves as a major implication to the growth of crops all year. Climate change poses a significant challenge to traditional crop production, as crops depend on specific climate conditions such as humidity, temperature, and sunlight exposure for optimal growth [2]. Yeh and Chung [3] highlighted that with Vertical farming, one can create a microclimate and eliminate risks and hazards, increasing crop production. Plants also require light to photosynthesize for energy creation. Using LEDs (Light Emitting Diode) in vertical farms provides plants with the required spectrums of light needed to grow plants efficiently compared to the sunlight. Figure 1 shows the concept design of vertical farm.
Birkby [4] proved that creating a microclimate to plant our preferred crop at any time is the major advantage of a vertical farm. Vertical farming is an urban method of growing crops on stacks or layers without the use of soil in a closed or controlled environment. Vertical farming yields more produce than traditional farming since it uses less water and utilizes spaces better than conventional farming. 80% less water is used, there is more control over pests, climate change has little or no effect on the vertical farm and any type of plant can be cultivated all year long [5]. By farming inside of a building, Benke and Tomkins [6] stated that one can decrease the amount of land, water, energy, chemicals, and transportation used to feed the world. Vertical farming is one of the ways by which plants can be produced with technological advancement and it is becoming a subject of discussion in industrial and scientific spaces. Advancement in technologies in the world is a big step toward solving food problems globally as the population becomes increasingly large. Smart farming with IoT devices and the application of robotics is the common means used in this advancement. In traditional vertical farms with tall setups or configurations, farmers are required to climb at high altitudes using ladders to perform tasks such as sampling crops for testing, human pollination, harvesting, inspection, and other related activities, all of which are necessary to maintain productivity [7].
Figure 1. Concept design of vertical farm
1.1 Objectives
This study aims to explore the potential of low-cost, modular vertical farms in households for sustainable and efficient crop production. It investigates the effectiveness of advanced monitoring systems, mechanical drives, and the Nutrient Film Technique (NFT) hydroponics method in optimizing plant growth and maintenance. The objective of this project is to domesticate vertical farming technology in Nigeria at a low cost with the use of sustainable materials and to remotely monitor the vertical farm using an automated camera drive. The current research of this paper covers how best farmers can use robotics and computer vision to carry out monitoring activities on the vertical farm remotely using Wi-Fi cameras and stepper motors [8]. Another crucial aspect of this project is to fully automate the supply of water and nutrients to the crops by utilizing sensors, such as temperature and humidity sensors, to measure the microclimate conditions of the farm. These sensor readings are then used to adjust the automation process and ensure optimal conditions for the growth of the crops. LEDs would serve as sunlight for the farm to allow for photosynthesis [9]. The result at the end of the project would provide data and analytic values to compare the result gotten from the objective of the project to the traditional farming techniques used in Nigeria and the world.
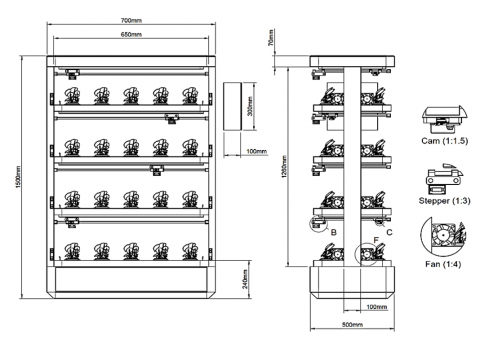
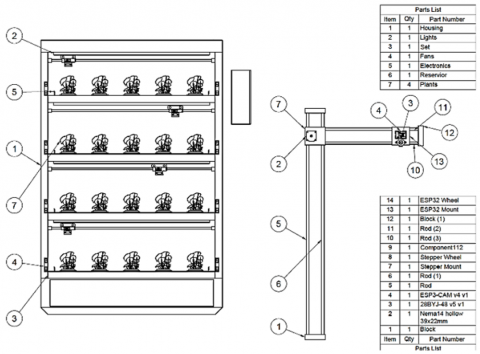
The vertical farming system grows Vegetables in a 1.5 meters tall steel-shaped cuboid enclosure. The cuboid-shaped frames are simple to fabricate and install and easy to maintain. The vertical farm has three layers, each with three grow trays, enclosed in a transparent structure. The vertical farm consists of two subsystems: The mechanical system and the automation system. Figures 2 and 3 show vertical farm with dimensions. The study focuses majorly on the automated processes on the vertical farm and the automated camera drive for remote monitoring and surveillance [10]. Both the electronic control unit and water-nutrient storage stay safe in the reservoir. Figure 4 shows a well labelled of vertical farm.
2.1 Design
The first stage of this study was to design a functional model of the vertical farming rig using Autodesk Fusion 360.
Key considerations include:
- Material selection-Material selection plays a crucial role in the design process as it determines the durability, sustainability, and overall performance of the vertical farming system. Choosing appropriate materials, such as sustainable and locally sourced materials, ensures that the system is environmentally friendly and can withstand the demands of cultivation. The material selection for the frame is a mild steel sheet, mild steel square pipe, and Polymethyl methacrylate (PMMA) transparent polymer to form the enclosure of the vertical farm.
- The total capacity of the growing frame-The total capacity of the growing frame is an important consideration as it determines the overall production capability of the vertical farming system. It influences the quantity of crops that can be grown within the given space, enabling efficient use of resources and maximizing yield potential.
- The number of levels and the required number of growing trays on each level-The number of levels and the required number of growing trays on each level are essential factors in the design process. Determining the optimal number of levels ensures efficient space utilization and facilitates vertical growth. Additionally, calculating the required number of growing trays per level ensures that the system can accommodate the desired quantity of crops and supports effective crop management, including planting, maintenance, and harvesting processes.
Figure 2. Vertical farm with dimension 01
Figure 3. Vertical farm with dimension 02
Figure 4. Parts labelling of vertical farm
2.2 Grow trays for growth
The grow trays are formed from square PVC pipes. Each pipe has a length of 62 cm. A single PVC square pipe has six holes each to hold the grow cups for the nutrient film technique. These holes were created by heating a 70 mm diameter steel pipe and applying pressure to the square's top. Grow trays function so that water goes in and out of the tray using round PVC pipes or hoses [10, 11]. Polystyrene with glue was applied at both ends of the grow tray to prevent leakage of the water-nutrient solution. Figure 5 shows an PVC grow trays.
Figure 5. PVC grow trays
The grow cups are made from disposable plastic cups. The cups are filled with the substrate to hold the plant and act as units for watering the plants. Consideration for good grow trays in the following [10]:
Material selection
Volume of grow tray
Total capacity of the tray with expected plant size
2.3 Crop choice
Amaranth, Green Pepper, Okra, and Waterleaf plants are planted on the vertical farm. The seeds were obtained from the National Institute for Horticulture (NIHORT) in Ibadan, Nigeria, ensuring their suitability for the local climate. The choice of these crops for the vertical farm was based on their nutritional value and popularity as food crops. Before being transferred to the vertical farm, the crops were initially grown in small containers under controlled conditions with grow lights, ensuring healthy seedlings. This approach helps establish strong plants that have a higher chance of success in the vertical farming environment, leading to productive crop production.
2.4 Grow lights (LEDs)
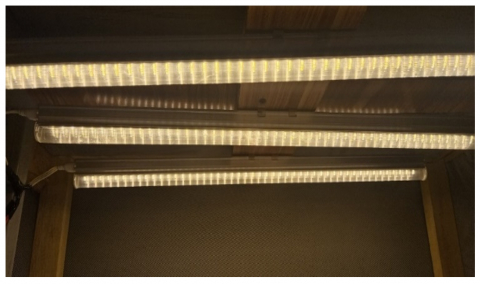
LED tubes mounted in wooden holders provide lighting. Each holder can accommodate three tubes of LEDs. The LEDs provide suitable light conditions to the plants using an AC supply of electricity directly from the circuit board [12]. Each tube has a power rating of 9 watts. Three LED tubes are placed above each growing trough or tray using a wooden holder. The LEDs, connected in series, are powered directly from the 220V electronic unit in the reservoir. Figure 6 displays growing lights on the farm rig.
Figure 6. Grow lights on the farm rig
2.5 Electronics
The vertical farm is a smart farm with several devices to sustain the growth of the crops using artificial lighting, sensors, electric motors, and processing boards. Artificial lighting is employed to provide the necessary light spectrum and intensity for photosynthesis, enabling plants to grow efficiently. By using artificial lighting, the vertical farm ensures consistent and controlled lighting conditions, overcoming limitations imposed by sunlight availability or seasonal changes. Sensors are utilized to monitor crucial environmental factors such as temperature, humidity, CO2 levels, and nutrient levels. These sensors provide real-time data that enables precise control and adjustment of the microclimate within the vertical farm [12], optimizing growing conditions and promoting healthy plant growth. Electric motors play a vital role in automating various tasks within the vertical farm. They can drive mechanisms for water and nutrient delivery, adjust the positioning of grow lights or shelves, and enable vertical movement of the farming system. Electric motors provide precise and efficient control, contributing to the overall automation and efficiency of the vertical farm. Processing boards, such as microcontrollers or single-board computers, act as the brain of the vertical farm system. They receive and process data from sensors, control the operation of electric motors, and manage the overall automation and monitoring of the farm. Processing boards enable data-driven decision-making, allowing the system to respond and adapt to changing environmental conditions and crop requirements in real-time. The project makes use of the following devices.
2.6 Raspberry Pi 3 Model B
The microprocessor connects to the microcontroller to process data gotten from the motors and sensors to provide the best algorithms for crop production in the vertical farm [13, 14]. The Raspberry Pi 3 Model B, with its 1.2GHz quad-core ARM Cortex-A53 processor, 1GB of RAM, integrated Wi-Fi, Bluetooth connectivity, and GPIO pins, serves as the microprocessor in the vertical farm project. Its specifications make it suitable for processing data from motors and sensors and providing optimized algorithms for crop production. The Raspberry Pi's computing power, wireless connectivity, and compatibility with various devices make it an ideal choice for this project, enabling efficient data processing and remote monitoring and control of the vertical farm system.
2.7 Arduino Mega 2650 microcontroller
The following devices are connected to the microcontroller: Stepper motors through stepper drivers, sensors responsible detect characteristics on the vertical farm, fans, water-nutrient pump, and the microcontroller. The Arduino Mega 2560 microcontroller was chosen for its versatile capabilities, ample connectivity options, and extensive community support. With its powerful 8-bit Atmega 2560 microcontroller, it can efficiently handle multiple tasks and interface with various devices in the vertical farm system. The Arduino Mega's compatibility with stepper drivers, sensors, and other components simplifies integration, making it an ideal choice for the project's automation needs. Its reliability, flexibility, and extensive feature set make it well-suited for the demands of the vertical farm project [15, 16].
2.8 Capacitive soil moisture sensor
The sensor used is RXW-GP4-921–HOBOnet wireless multi-depth soil moisture sensor. It is connected directly to the microcontroller to receive data and send signals to the water pump to send water where needed. It consists of corrosion-resistant material. It is inserted into the soil to give real-time soil moisture data.
2.9 Photo-resistor (LDR)
An ambient Light Sensor (ALS) is a sensor that measures the intensity of visible light. This sensor connects to the growing lights to control light intensity based on plant requirements.
2.10 Wireless camera module (Esp32 cam)
This camera sends live coverage of what is happening on the farm. The Raspberry Pi uses the IP (Internet Protocol) address of the camera to process plant images using computer vision. The Esp32 has the following specifications: Power Supply: 5V, Transmitting Power: 802.11n: 13±2dBm, Reception Sensitivity: CCK, 1Mbps: -90dBm, Operating Temperature: -20℃~85℃, Storage Environment: -40℃~90℃, <90% RH, Dimensions: 40.5mm×27mm×4.5mm.
2.11 Reservoir for nutrients and water
The water-nutrient solution resides beneath the steel enclosure. The water-nutrient solution flows to the grow tray via a submersed pump in the solution. The water-nutrient container was designed with a capacity of up to 10 liters of fluid, determined based on the specific requirements of the vertical farm system, including the number of plants, their water and nutrient needs, and desired circulation rate. The sides of the grow tray have openings to prevent overflow. The overflown solution flows back to the reservoir to avoid wastage.
2.12 Transparent enclosure to form a microclimate
The vertical farm is enclosed with a transparent material called Plexiglass. Also known as acrylic, acrylic glass, or more scientifically, Poly methyl methacrylate (PMMA), Plexiglass is a transparent petroleum-based thermoplastic typically manufactured in sheets. It is strong, tough, and lightweight, with a higher impact strength than glass. It is also durable for outdoor applications due to higher environmental stability than most other plastics, such as polystyrene and Polyethene. Plexiglass is chosen for the transparent enclosure in the vertical farm due to its transparency, strength, lightweight nature, impact resistance, and environmental stability, making it an ideal material to protect and nurture the crops while allowing sunlight to reach them.
2.13 Mechanical drive for operations
The mechanical drive is a motorized slider with two stepper motors. One stepper motor control the camera’s left and right directions, while the other controls the camera’s arm for movements along the wooden arm. The mechanical drive system utilizes two specific stepper motors: the NEMA 17 for camera's lateral movements and the NEMA 23 for camera arm's motions along the wooden arm. These stepper motors were selected for their precise control, suitable torque output, and smooth operation, ensuring accurate positioning within the vertical farm.
2.14 Programming and open computer vision
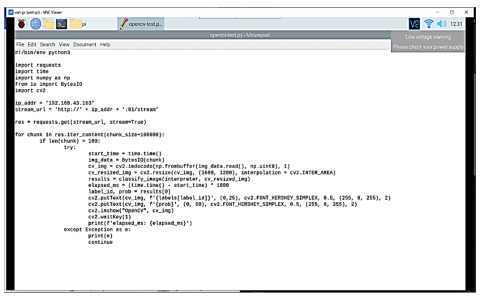
Microprocessors and microcontrollers are programmable boards used to control the vertical farm's systems. The microprocessor receives data from the microcontroller and uses Linux as its operating system to control farm operations. The microcontroller is a more basic board that reads and sends commands to various devices. Using its IP address, the wireless camera module sends a live stream to the Raspberry Pi (see Figure 7). The IP address is then sent to Open-CV (computer vision) to inspect the crop's characteristics such as leaf colour, fruit colour, shape, and so on, to provide relevant data for analyses and image processing. Figure 8 shows Esp32 cam streaming. OpenCV offers robust computer vision capabilities for analyzing crop characteristics in the vertical farm, supporting tasks such as color and shape analysis [17-19]. Code used for setting up the wireless camera module for wireless connectivity to remote systems or displays.
2.15 Working principles of the vertical farm
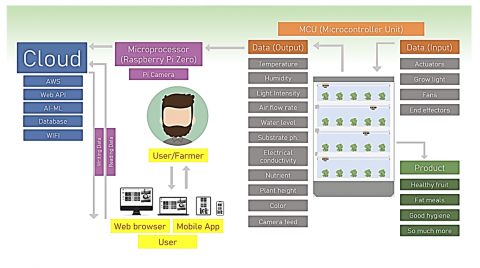
The vertical farm operates through a series of interconnected components and power sources as depicted in Figure 9. The main electronics board facilitates power conversion from 220V to 5V and 12V. The 5V connection powers the stepper motors, motor driver, microcontroller, soil moisture sensor, humidity sensor, and temperature sensor. The 12V connection powers the water-nutrient pump, relays, and microprocessor. The 220V power source drives the grow lights and AC cooling fans. Upon powering up, the cooling fan and grow lights activate. The microprocessor, powered by 12V, enables immediate control of the automation system and communication with the wireless camera module for visual inspection and image recognition. The microcontroller controls the stepper motors responsible for camera movement on each rack. Processed information from the vertical farm is transmitted via the internet using the microprocessor, allowing remote access from anywhere in the world. The microprocessor acts as the central processing unit, receiving data from sensors and controlling high-level tasks such as visual inspection and data transmission. The microcontroller, on the other hand, interacts with various components, driving stepper motors and controlling devices like relays.
Figure 7. Raspberry pi interface with OpenCV algorithm (computer vision)
Figure 8. Esp32 cam streaming
Figure 9. Vertical farming layout
The dimensions of a tray are 60×9×6 cm. The entire procedure of thoroughly filling the PVC grow tray, with a volume of 3.24 liters, takes about 5 minutes. This is because the system's high-powered water-nutrient pump reduces the time it takes to complete the operation. The output power can be regulated to keep the flow rate from becoming too rapid [10, 13]. The pump has a maximum flow rate of 300 liters per hour. However, because of safety concerns, the power is reduced to the bare minimum for testing the flow rate. Because of the gentle slope of the grow tray, it takes significantly longer for the water to drain back from it. The reason for doing it this way is to allow gravity to pull the water back into the reservoir. Figures 10-13 show the germination period of the Amaranth, Green Pepper, Okra, and Waterleaf plants.
The electronic components that consume electrical energy include growth light, the surface, submersible water pumps, and fans. From the early stage of germination, some crucial observations were made. On the first layer, Amaranth did well. Germination occurred in less than 4 days with the intensity of the grow lights. This was the same for beans, germination occurs within 2-5 days of planting on the vertical farm. This study does not provide specific quantitative data, such as germination rates, growth rates, or biomass production, to support this statement.
Figure 10. Day (1-5) planting black-eyed peas beans
Figure 11. Day 1-planting with grow light
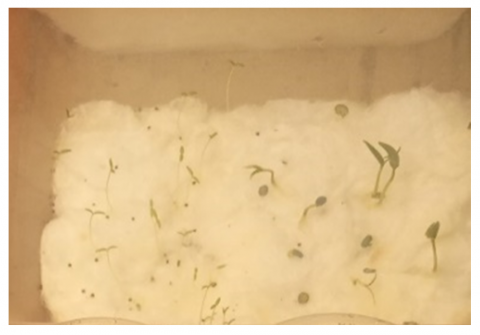
The second layer was used to grow green pepper. As a nursery, it did well with germination compared to traditional methods. On the third layer, the substrate used for growing okra was cotton wool. However, cotton wool proved to be inappropriate as it lacked the necessary airflow and porosity required for successful okra growth. The dense and sludgy nature of cotton wool hindered proper root development and led to a decay in the seed. The lack of adequate aeration and drainage in the substrate prevented the optimal supply of oxygen and nutrient uptake, adversely affecting the growth and survival of the okra plant.
Figure 12. Day 5 of planting
The delayed addition of the Perspex enclosure, caused by logistical challenges, allowed insects to access the plants and affected their health and performance. Prompt installation of the enclosure and implementing preventive measures can mitigate such issues. The vertical farm system yielded positive results with varying outcomes across different crops and layers. Rapid germination and growth were observed for Amaranth and beans, while challenges included inappropriate substrate for okra and insect infestation due to delayed enclosure installation. Automation and sensor-based control demonstrated potential for optimized crop production.
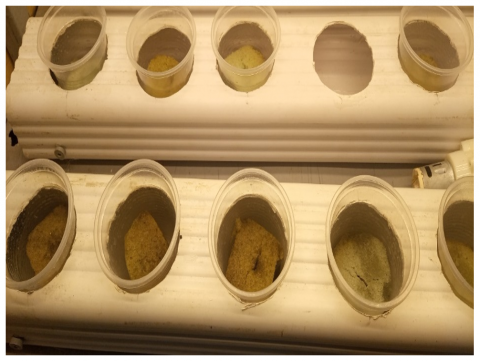
Figure 13. Okra seed in foam
3.1 Limitations of the proposed monitoring system
Time Limitation:
The project faces a significant time limitation as it requires extended periods for plant growth, coupled with the need for daily observations to monitor their progress.
Plant Detection Limitation:
Cameras need to provide more than just video feed and color difference, as they must offer advanced capabilities for image analysis and pattern recognition. This information is vital for the monitoring system to assess crop characteristics, detect anomalies, and optimize farm operations.
System Challenges:
Aside from that, one of the project's key constraints is keeping the plants growing. Plants can perish unnoticed by the cameras due to pests, diseases, nutrient deficiencies, or environmental stressors. Incorrect input of water-nutrient solution, light intensity, artificial ambient conditions, and other relevant inputs can reduce the quality of crops on the vertical farm [14]. Optimal nutrient concentration is crucial for the successful growth of plants in the vertical farming system. High nutrient concentrations can lead to plant mortality, while a proper nutrient balance supports positive growth [15]. By employing an automated monitoring mechanism, users can effectively track the nutritional status of the plants, eliminating the need for manual oversight [10, 16]. The control system in place reduces the time required to replace the water-nutrient solution, ensuring efficient nutrient delivery to the crops. The observed data can be used to analyze and improve the vertical farm's performance by identifying growth patterns, optimizing environmental conditions, adjusting nutrient composition, detecting anomalies, and enhancing operational efficiency. In addition to the mentioned limitations, challenges with sensor accuracy, system reliability, and scalability should be considered in the proposed monitoring system. Sensor accuracy may be affected by calibration drift, environmental variations, or degradation. System reliability could be compromised by hardware or software failures, connectivity issues, or power disruptions. Scalability may pose challenges in managing more sensors, synchronization, and increased data processing.
In summary, a method for automated monitoring of vertical farming was developed successfully to minimize the work required of farmers. The monitored data was used in the control system to guarantee that the Vegetables received the highest quality nutrition solution possible. The microclimate on the vertical farm significantly affects crop selection and growth. Factors such as temperature, humidity, air circulation, and light intensity determine which crops thrive and how well they develop. First, there is room for improvement in the mechanical architecture of the vertical farm. Wood can be used for structural elements, providing strength and natural aesthetics, while 3D-printed components offer customization and reduced waste in manufacturing. These sustainable materials not only improve the overall design but also promote environmental sustainability. Secondly, the automated drive can be used for other agricultural processes aside from mounting a camera on it for computer vision. The automated drive is a vital component of the vertical farm system, enabling precise movement of key elements such as cameras, grow lights, and irrigation systems. By automating these processes, the vertical farm gains efficiency, accuracy, and adaptability. The automated drive streamlines operations and maximizes productivity in the vertical farm. The process includes: The automated drive plays a crucial role in facilitating pollination within the vertical farming environment, as it eliminates the need for external pollination agents to enter the system.
The robust drive in a large-scale vertical farm can be used as a harvester, but it presents challenges such as specialized tools, precise cutting, and adaptability to different crops. Further research is needed to optimize its performance. The vertical farming rig could be more flexible in its operations by creating an adjustable rack to accommodate the increase in the height of the plants. Other vital measurements, such as carbon dioxide, light intensity, and dissolved oxygen level, should be considered in the monitoring process in addition to the mechanical design. These parameters directly impact photosynthesis, nutrient uptake, and overall plant health. Integrating them into the monitoring system enables real-time tracking and adjustment of environmental conditions, promoting optimal plant development and improved crop quality. The research findings underscore the critical need for a robust monitoring system to ensure healthy plant development, highlighting their valuable implications for advancing vertical farming practices.
The Authors extend their appreciation to the Founder and Management of Afe Babalola University; Ado Ekiti for the payment of Article Processing Charges (APC) of this manuscript.
[1] Dixon, G.R. (2012). Climate change-impact on crop growth and food production, and plant pathogens. Canadian Journal of Plant Pathology, 34(3): 362-379. https://doi.org/10.1080/07060661.2012.701233
[2] Mechiche-Alami, A. (2020). Food security in a changing climate: The role of cropland intensification and land acquisitions across Africa. Lund University, Faculty of Science.
[3] Yeh, N., Chung, J.P. (2009). High-brightness LEDs-energy efficient lighting sources and their potential in indoor plant cultivation. Renewable and Sustainable Energy Reviews, 13(8): 2175-2180. https://doi.org/10.1016/j.rser.2009.01.027
[4] Birkby, J. (2016). Vertical farming. ATTRA Sustainable Agriculture, 2: 1-12.
[5] Redmond, R.S., Fatemeh, K., Ting, K.C., Thorp, K.R., Hameed, I.A., Weltzien, C., Ahmad, D., Shad, Z.M. (2018). Advances in greenhouse automation and controlled environment agriculture: A transition to plant factories and urban agriculture. International Journal of Agricultural and Biological Engineering, 11(1): 1-22. https://doi.org/10.25165/j.ijabe.20181101.3210
[6] Benke, K., Tomkins, B. (2017). Future food-production systems: Vertical farming and controlled-environment agriculture. Sustainability: Science, Practice and Policy, 13(1): 13-26. https://doi.org/10.1080/15487733.2017.1394054
[7] Taufani, B. (2017). Urban farming construction model on the vertical building envelope to support the green buildings development in Sleman, Indonesia. Procedia Engineering, 171: 258-264. https://doi.org/10.1016/j.proeng.2017.01.333
[8] Duckett, T., Pearson, S., Blackmore, S., Grieve, B., Chen, W.H., Cielniak, G., Cleaversmith, J., Dai, J., Davis, S., Fox, C., From, P., Georgilas, I., Gill, R., Gould, I., Hanheide, M., Hunter, A., Iida, F., Mihalyova, L., Nefti-Meziani, S., Neumann, G., Paoletti, P., Pridmore, T., Ross, D., Smith, M., Stoelen, M., Swainson, M., Wane, S., Wilson, P., Wright, I., Yang, G.Z. (2018). Agricultural robotics: The future of robotic agriculture. arXiv Preprint arXiv, 1806.06762. https://doi.org/10.48550/arXiv.1806.06762
[9] Lakhiar, I.A., Jianmin, G., Syed, T.N., Chandio, F.A., Buttar, N.A., Qureshi, W.A. (2018). Monitoring and control systems in agriculture using intelligent sensor techniques: A review of the aeroponic system. Journal of Sensors, 2018: 1-18. https://doi.org/10.1155/2018/8672769
[10] Van Gerrewey, T., Boon, N., Geelen, D. (2021). Vertical farming: The only way is up? Agronomy, 12(1): 2. https://doi.org/10.3390/agronomy12010002
[11] Waldron, D. (2018). Evolution of vertical farms and the development of a simulation methodology. WIT Transactions on Ecology and the Environment, 217: 975-986. https://doi.org/10.2495/SDP180821
[12] Despommier, D. (2013). Farming up the city: The rise of urban vertical farms. Trends Biotechnol, 31(7): 388-389. https://doi.org/10.1016/j.tibtech.2013.03.008
[13] Kozai, T., Niu, G. (2016). Plant factory as a resource-efficient closed plant production system. In Plant Factory. Academic Press, pp. 69-90. https://doi.org/10.1016/B978-0-12-801775-3.00004-4
[14] Benke, K., Tomkins, B. (2017). Future food-production systems: Vertical farming and controlled-environment agriculture. Sustainability: Science, Practice and Policy, 13(1): 13-26. https://doi.org/10.1080/15487733.2017.1394054
[15] Tuomisto, H.L. (2019). Vertical farming and cultured meat: Immature technologies for urgent problems. One Earth, 1(3): 275-277. https://doi.org/10.1016/j.oneear.2019.10.024
[16] Atzori, G., Pane, C., Zaccardelli, M., Cacini, S., Massa, D. (2021). The role of peat-free organic substrates in the sustainable management of soilless cultivations. Agronomy, 11(6): 1236. https://doi.org/10.3390/agronomy11061236
[17] Bhat, S.A., Huang, N.F. (2021). Big data and ai revolution in precision agriculture: Survey and challenges. IEEE Access, 9: 110209-110222. https://doi.org/10.1109/ACCESS.2021.3102227
[18] Odesola, I.F., Kazeem, R.A., Ehumadu, N.C. (2016). Design and construction of a fish feed extruder. International Journal of Scientific & Engineering Research, 7(8): 1378-1386.
[19] Aliyu, S.J., Nnodim, C.T., Adebayo, K.R., Banji, A.A. (2021). Performance evaluation of locally designed and produced parabolic solar cooker. International Journal of Energy and Environmental Science, 6(4): 96-106. https://doi.org/10.11648/j.ijees.20210604.14