Aarthi D![]() | Panimalar A
| Panimalar A![]() | Santhosh Kumar S*
| Santhosh Kumar S*![]() | Anitha K
| Anitha K![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Image denoising is crucial for enhancing image quality, especially in medical applications where noise can significantly impact the accuracy of analysis and interpretation. This paper presents the development of an adaptive Gaussian filter-based denoising technique that effectively enhances images corrupted by various types of noise. By incorporating the adaptive adjustment of filter parameters based on local image characteristics, the proposed method achieves superior denoising performance. The algorithm analyzes the noisy image to estimate the noise characteristics, dynamically adjusting the Gaussian filter parameters to ensure optimal preservation of image details while effectively suppressing noise artifacts. Optimized strategies for parameter selection and filtering operations are employed to ensure computational efficiency. A comparative analysis demonstrates that the adaptive Gaussian filter outperforms traditional methods, achieving a higher Peak Signal-to-Noise Ratio (PSNR) and a lower Root Mean Square Error (RMSE). The technique also exhibits robustness against different noise distributions, making it a versatile solution for various image enhancement applications. These findings highlight the potential of the adaptive Gaussian filter to significantly improve image quality, facilitating more accurate and reliable analysis across diverse domains.
image denoising, filtration, gaussian filter, PSNR, RMSE
Medical imaging is indispensable in modern healthcare, offering non-invasive insights into internal structures for clinical analysis and intervention. It facilitates detailed visualization and monitoring of organs and tissues, aiding accurate diagnoses and treatment plans. The continual evolution of imaging technology significantly contributes to enhanced patient care and treatment outcomes, making medical imaging integral part of modern medicine.
The synergy between mathematics and the medical field is a powerful force, leveraging abstract analytical tools to address practical healthcare challenges. Quantitative methods, including statistical analysis and mathematical modeling, are crucial for understanding disease patterns, predicting outcomes, and optimizing healthcare processes. This symbiotic relationship not only deepens our understanding of biological systems but also drives innovation in diagnostic techniques, treatment strategies, and overall healthcare delivery.
Image processing, situated at the crossroads of computer science, mathematics, and engineering, plays a pivotal role in medical imaging by applying algorithms for tasks like reconstruction, segmentation, and feature extraction. Denoising [1], a critical technique within image processing, aims to reduce unwanted noise and enhance image quality. In medical imaging, denoising [2] directly influences diagnostic accuracy and treatment planning, contributing to more reliable clinical assessments. The continuous development of denoising methods ensures the production of high-fidelity images across various applications, from healthcare to computer vision and scientific research. Fuzzy logic [3] plays a significant role in image processing, providing a framework for handling uncertainty and imprecision inherent in image data. In image processing, fuzzy logic [4] allows for the development of algorithms that can effectively deal with vague or subjective information, such as edge detection, segmentation, and pattern recognition. By incorporating fuzzy sets, fuzzy inference systems, and fuzzy clustering techniques, image processing tasks can be performed with greater robustness and flexibility, enabling the extraction of meaningful information from complex and noisy image datasets. Fuzzy logic-based [5, 6] image processing techniques have been successfully applied in various fields, including medical imaging, remote sensing, object recognition, and computer vision, contributing to advancement in automated image analysis and decision-making systems.
Zaynidinov et al. [7] described a technique that uses two-dimensional Haar wavelets to digitally compress an image, to find the recovery coefficients, and show the modified image in a higher quality than the original. One of the most common issues with image compression is figuring out and implementing a workable solution that enables you to display every kind of pixel (dot) in a condensed form. This issue was resolved by using a two-dimensional Haar wavelet [8] modification, which led to the compression of the image and improved quality of the processed image over the original. Also, Zhu [9] investigation delves into a total variation-based image denoising model aimed at addressing the staircasing phenomenon inherent in the Rudin-Osher-Fatemi model. This variational model is optimized through the Augmented Lagrangian Method (ALM). A convergence analysis of the proposed algorithm is provided, demonstrating the characteristics of the model and the efficiency of the suggested numerical technique through numerical experiments. Siddig et al. [10], suggested a fourth order image denoising model such that on applying the fixed-point theorem an entropy solution exists and is unique. Also, numerical experiments based on the fast explicit diffusion scheme (FED) demonstrates the efficiency of the proposed method in image denoising. The proposed method was compared with three other models namely, modern mean curvature (MC) model, the You and Kaveh (YK) model, and the Lysaker, Lundervold, and Tai (LLT) model. Their performance was analyzed and is more efficient in reducing noise and maintaining image.
Evaluation by Palma et al. [11] provides a comprehensive overview of anisotropic diffusion filtering, a popular technique used for image denoising and enhancement. The focus on MRI evaluation suggests that the method examines the effectiveness of anisotropic diffusion filtering specifically in the context of MRI images. This valuable contribution on MRI images often suffers from noise and artifacts, and the performance of denoising techniques can vary depending on the characteristics of MRI data. But there is no optimize parameters to address specific artifacts and to validate the technique in clinical practice. Yuan and He [12] explored the use of an anisotropic diffusion-based preprocessing filtering algorithm for segmenting high-resolution remote sensing images. The authors introduce anisotropic diffusion filtering, a technique used for image enhancement and noise reduction while preserving edges and features.
Shahin et al. [13] introduced a novel enhancement technique for improving the quality of pathological microscopic images by employing neutrosophic similarity score scaling. It provides an introduction to neutrosophic similarity score scaling, a method used for image enhancement that considers the neutrosophic similarity between pixels. Neutrosophic logic deals with uncertainty, indeterminacy, and inconsistency, making it suitable for handling the complexities of pathological microscopic images.
Khan et.al. [14] emphasized on denoising in complex fuzzy environments suggests that it explores scenarios where signals are affected by multiple sources of uncertainty, ambiguity, or imprecision. This could include environments with uncertain noise characteristics, fuzzy boundaries between signal and noise, or imprecise measurement conditions. But fails in adaptation of denoising techniques to dynamic or evolving environments. In many real-world applications, signal characteristics and noise properties may change over time, requiring adaptive denoising algorithms that can dynamically adjust to changing conditions. Ali [15] investigated the performance of three different completely filtering methods tested with different noises on Magnetic Resonance Imaging (MRI) images. The median filter algorithm is modified, and Gaussian noise and salt-and-pepper noise are added to the MRI image. The proposed Median Filter (MF), Adaptive Median Filter (AMF), and Adaptive Wiener Filter (AWF) are implemented.
The existing literature highlights various image compression and denoising techniques but lacks a robust solution that adapts effectively to varying noise types and image conditions. While methods like anisotropic diffusion and neutrosophic scaling show promise, they often fall short in dynamic or complex environments. This research gap underscores the need for an adaptive Gaussian filter, which can dynamically adjust to different noise characteristics, offering a more versatile and reliable solution for image denoising.
An image [16] can be assumed to be an encoded form of matrix with grey-level or color pixel intensity values as its elements. In case of grey scale images, it can be referred to as pixel value in two-dimension (x, u(x)) where u(x) is the pixel intensity value at location x. An image noise model can roughly be approximated as:
f(x)=u(x)+n(x),x⊂X,X⊂Z2
where, u(x) denotes the original pixel matrix and n(x) denotes noise at location x. The image used is an MRI brain image (Figure 1).
(a) Original image
(b) Salt and pepper
(c) Gaussian noise
(d) Speckle noise
With Noise Density 0.06
Figure 1. MRI image displaying original image and noised images
The Gaussian membership function is a bell-shaped curve used in fuzzy logic to determine the degree of membership of an element in a fuzzy set. Its formula is given by:
μ(x)=exp(−(x−c)22σ2)
where, μ(x) is the membership value for an element x, c is the centre or peak of the curve, σ is the standard deviation controlling the spread of the curve.
In the context of image processing, particularly denoising of pixel matrices, the Gaussian membership function can be applied to assign membership values [17] to pixel intensities. The peak of the Gaussian curve represents the intensity value with full membership, while values farther from the peak have lower membership. This function is useful for capturing the gradual transition between different intensity levels, allowing for a smooth representation of uncertainties in pixel values. When denoising an image, the Gaussian membership function helps in preserving important details while smoothing out noise, providing a balanced and effective approach to enhance image quality.
Filtering techniques are essential tools in image processing that play a crucial role in enhancing image quality and extracting relevant information. These techniques involve the application of filters, which are mathematical operations applied to pixel values in an image. Filtering techniques [18, 19] find widespread use in various fields, including medical imaging, computer vision, and remote sensing. They are employed for tasks such as noise reduction [20], edge enhancement, and feature extraction. The choice of a filtering technique depends on the specific characteristics of the image and the objectives of the image processing task. While some filters are designed to smoothen the image and reduce noise, others are tailored for edge detection or sharpening details. The continuous evolution of filtering techniques contributes to advancements in image processing, facilitating improved analysis and interpretation of visual data in diverse applications.
Gaussian filters, both 1D and 2D, are vital for medical image processing, particularly MRI, since they effectively reduce noise while maintaining important imagine characteristics. By using fuzzy logic to address uncertainties in picture data, the fuzzy Gaussian filters improve this capability even more. Standard and fuzzy Gaussian filters smooth images while maintaining edges, providing a balanced approach to noise reduction. They are computationally efficient, can tolerate a wide range of noise kinds, and serve as the foundation for numerous sophisticated image processing methods. While traditional filters such as wiener and median filters have their advantages, Gaussian filters are often more versatile, computationally efficient, and able to handle a wider range of noise types.
When it comes to context-aware smoothing, adaptive filters are excellent at distinguishing between different kinds of image regions and applying the right amount of smoothing to improve overall image quality and minimize abnormalities. Adaptive Gaussian filters are particularly helpful in situations where preserving minute structural details is crucial, such medical imaging, is required for accurate diagnosis and analysis, due to their versatility and effectiveness.
This paper presents four types of adaptive gaussian filter [21, 22] and their performance analysis.
5.1 Adaptive gaussian filter 1D and derivative of gaussian 1D (AGD-1D)
It is a filter whose impulse response is gaussian function. A Gaussian filter [23] is a popular image processing technique used for smoothening and reducing noise in images. It is based on the Gaussian distribution [24, 25] and operates by convolving the image with a Gaussian kernel. The mathematical formula for a one-dimensional Gaussian function is given by:
G(x)=1√2πσ2exp(−x22σ2) (1)
where, G(x) is the value of the Gaussian function at position x, σ is the standard deviation, determining the width of the gaussian curve. The standard deviation and the constant value are given by:
σ=√1mn∑mi=1∑nj=1(A(i,j)−m)2;∝=Amax (2)
where, max(|A|) is the maximum absolute value of any element in the matrix. Derivative [26, 27] of Gaussian 1D filter can indirectly contribute to denoising by emphasizing edges and suppressing noise. The steep response of the filter to intensity changes can help highlight significant structures in the image while minimizing the influence of random noise. The one-dimensional mathematical formula for the derivative of Gaussian 1D filter is given by:
\frac{\partial G(x)}{\partial x}=-\frac{x}{\sigma^3} \exp \left(-\frac{x^2}{2 \sigma^2}\right) (3)
where, \frac{\partial G(x)}{\partial x} is the derivative of the Gaussian function with respect to x, x is the spatial coordinate, σ is the standard deviation, controlling the width of the Gaussian distribution.
F(x, \sigma)=G(x)+\alpha \cdot \frac{\partial G(x)}{\partial x} (4)
where, α is a constant multiplier for the derivative term. The combine equation represents a linear combination of a Gaussian Function and its derivative.
\begin{aligned} F(x, \sigma) & =\frac{1}{\sqrt{2 \pi} \sigma} \exp \left(\frac{-x^2}{2 \sigma^2}\right)+\alpha \cdot\left[-\frac{x}{\sigma^2} \frac{1}{\sqrt{2 \pi} \sigma} \exp \left(\frac{-x^2}{2 \sigma^2}\right)\right] \\ & =\frac{1}{\sqrt{2 \pi} \sigma}\left[1-\alpha \cdot \frac{x}{\sigma^2}\right] \exp \left(\frac{-x^2}{2 \sigma^2}\right)\end{aligned} (5)
5.2 Adaptive gaussian 2D filter and derivative of 2D filter (AGD-2D)
A two-dimensional Gaussian filter, the formula is the product of two one-dimensional Gaussians along the rows and columns, forming a 2D kernel. The filter effectively reduces high-frequency noise in the image while preserving its overall structure. It is based on the mathematical formulation of a two-dimensional Gaussian distribution and operates by convolving the image with a Gaussian kernel. The mathematical formula for a two-dimensional Gaussian function is given by:
G\left(x, y, \sigma_x, \sigma_y\right)=\frac{1}{2 \pi \sigma_x \sigma_y} \exp \left(-\frac{x^2}{2 \sigma_x^2}-\frac{y^2}{2 \sigma_y^2}\right) (6)
where, G(x, y, σx, σy) is the value of the two-dimensional Gaussian function at positions x and y, σ is the standard deviation determining the width of the Gaussian distribution. Also, the two-dimensional Gaussian derivative filter is given by:
G_x\left(x, y, \sigma_x, \sigma_y\right)=-\frac{x}{\sigma_x^2} \frac{1}{2 \pi \sigma_x \sigma_y} \exp \left(-\frac{x^2}{2 \sigma_x^2}-\frac{y^2}{2 \sigma_y^2}\right) (7)
G_y\left(x, y, \sigma_x, \sigma_y\right)=-\frac{y}{\sigma_y^2} \frac{1}{2 \pi \sigma_x \sigma_y} \exp \left(-\frac{x^2}{2 \sigma_x^2}-\frac{y^2}{2 \sigma_y^2}\right) (8)
where, Gx(x, y, σx, σy) represents \frac{\partial G(x, y)}{\partial x}, Gy(x, y, σx, σy) represents \frac{\partial G(x, y)}{\partial y} are the partial derivatives of the Gaussian function with respect to x and y, σ is the standard deviation controlling the width of the Gaussian distribution, x and y are the spatial coordinates.
\begin{gathered}\quad F\left(x, y, \sigma_x, \sigma_y, \alpha, \beta\right)=G\left(x, y, \sigma_x, \sigma_y\right) \\ +\alpha \cdot G_x\left(x, y, \sigma_x, \sigma_y\right)+\beta \cdot G_y\left(x, y, \sigma_x, \sigma_y\right)\end{gathered} (9)
where, α, β are constant multiplier for the partial derivative in the x and y directions respectively. The final combined equation is:
\begin{aligned} & F\left(x, y, \sigma_x, \sigma_y, \alpha, \beta\right)=\frac{1}{2 \pi \sigma_x \sigma_y} \exp \left(-\frac{x^2}{2 \sigma_x^2}-\frac{y^2}{2 \sigma_y^2}\right) \\ & +\alpha \cdot\left[-\frac{x}{\sigma_x^2} \frac{1}{2 \pi \sigma_x \sigma_y} \exp \left(-\frac{x^2}{2 \sigma_x^2}-\frac{y^2}{2 \sigma_y^2}\right)\right] \\ & \quad+\beta\left[-\frac{y}{\sigma_y^2} \frac{1}{2 \pi \sigma_x \sigma_y} \exp \left(-\frac{x^2}{2 \sigma_x^2}-\frac{y^2}{2 \sigma_y^2}\right)\right]\end{aligned}
\begin{gathered}F\left(x, y, \sigma_x, \sigma_y, \alpha, \beta\right) \\ =\frac{1}{2 \pi \sigma_x \sigma_y}\left[1-\alpha \cdot \frac{x}{\sigma_x^2}-\beta \cdot \frac{y}{\sigma_y^2}\right] \exp \left(-\frac{x^2}{2 \sigma_x^2}-\frac{y^2}{2 \sigma_y^2}\right)\end{gathered} (10)
where,
\sigma_x=\sqrt{\frac{1}{n} \sum_{j=1}^n\left(A(i, j)-m_x\right)^2} for each i;
\sigma_y=\sqrt{\frac{1}{m} \sum_{i=1}^m\left(A(i, j)-m_y\right)^2} for each j;
\propto=\frac{A(i, j)}{\max (|A(i, j)|)_{\text {row }}} for each i, j;
\beta=\frac{A(i, j)}{\max (|A(i, j)|)_{\text {column }}} for each i, j.
5.3 Adaptive fuzzy gaussian 1D filter and derivative fuzzy gaussian 1D filter (AFGD-1D)
Let the function be represented as:
F(x, \sigma, m)=\frac{1}{\sqrt{2 \pi} \sigma} \exp \left(-\frac{(x-m)^2}{2 \sigma^2}\right) (11)
where, F(x, σ, m) is Fuzzy Gaussian 1D, x is a variable, σ is the standard deviation and m is a fuzziness parameter. Also, the derivative of Eq. (11) (i.e.) fuzzy gaussian function with respect to x. The derivative is given as:
F^{\prime}(x, \sigma, m)=-\left(\frac{x-m}{\sigma^2}\right) \frac{1}{\sqrt{2 \pi} \sigma} \exp \left(-\frac{(x-m)^2}{2 \sigma^2}\right) (12)
The final combination function is given by:
G(x, \sigma, m, \alpha)=F(x, \sigma, m)+\alpha \cdot F^{\prime}(x, \sigma, m)
where, σ is a constant multiplier and is calculated using (2):
\begin{aligned} & G(x, \sigma, m, \alpha)=\frac{1}{\sqrt{2 \pi} \sigma} \exp \left(-\frac{(x-m)^2}{2 \sigma^2}\right) \\ & \quad+\alpha \cdot\left[-\left(\frac{x-m}{\sigma^2}\right) \frac{1}{\sqrt{2 \pi} \sigma} \exp \left(-\frac{(x-m)^2}{2 \sigma^2}\right)\right]\end{aligned}
G(x, \sigma, m, \alpha)=\frac{1}{\sqrt{2 \pi} \sigma} \exp \left(-\frac{(x-m)^2}{2 \sigma^2}\right)\left[1-\alpha \cdot\left(\frac{x-m}{\sigma^2}\right)\right] (13)
where, m=\frac{1}{m n} \sum_{i=1}^m \sum_{j=1}^n A(i, j).
5.4 Adaptive fuzzy gaussian 2D filter and derivative of fuzzy gaussian 2D (AFGD-2D)
Consider a 2D fuzzy Gaussian function F\left(x, y, \sigma_x, \sigma_y, m_x, m_y\right) where x and y are the variables \sigma_x, \sigma_y, m_x, m_y are the standard deviation and mean along the respective axis. The function is given by:
\begin{gathered}F\left(x, y, \sigma_x, \sigma_y, m_x, m_y\right) \\ =\frac{1}{2 \pi \sigma_x \sigma_y} \exp \left[-\frac{\left(x-m_x\right)^2}{2 \sigma_x^2}-\frac{\left(y-m_y\right)^2}{2 \sigma_x^2}\right]\end{gathered} (14)
The fuzzy partial derivative of this 2D fuzzy gaussian function with respect to x and y. The partial derivatives are given by:
\begin{gathered}F_x\left(x, y, \sigma_x, \sigma_y, m_x, m_y\right) \\ =-\left(\frac{x-m_x}{\sigma_x{ }^2}\right) \frac{1}{2 \pi \sigma_x \sigma_y} \exp \left[-\frac{\left(x-m_x\right)^2}{2 \sigma_x{ }^2}-\frac{\left(y-m_y\right)^2}{2 \sigma_y{ }^2}\right]\end{gathered} (15)
\begin{gathered}F_y\left(x, y, \sigma_x, \sigma_y, m_x, m_y\right) \\ =-\left(\frac{y-m_y}{\sigma_y^2}\right) \frac{1}{2 \pi \sigma_x \sigma_y} \exp \left[-\frac{\left(x-m_x\right)^2}{2 \sigma_x^2}-\frac{\left(y-m_y\right)^2}{2 \sigma_y^2}\right]\end{gathered} (16)
Combining all above equations, we get:
\begin{gathered}G\left(x, y, \sigma_x, \sigma_y, m_x, m_y, \alpha, \beta\right) =F\left(x, y, \sigma_x, \sigma_y, m_x, m_y\right)+\alpha . F_x\left(x, y, \sigma_x, \sigma_y, m_x, m_y\right)+\beta . F_y\left(x, y, \sigma_x, \sigma_y, m_x, m_y\right)\end{gathered}
\begin{array}{r}G\left(x, y, \sigma_x, \sigma_y, m_x, m_y, \alpha, \beta\right)=\frac{1}{2 \pi \sigma_x \sigma_y} \exp \left[-\frac{\left(x-m_x\right)^2}{2 \sigma_x^2}-\frac{\left(y-m_y\right)^2}{2 \sigma_x^2}\right]+\alpha \cdot\left\{-\left(\frac{x-m_x}{\sigma_x^2}\right) \frac{1}{2 \pi \sigma_x \sigma_y} \exp \left[-\frac{\left(x-m_x\right)^2}{2 \sigma_x{ }^2}-\frac{\left.\left(y-m_y\right)^2\right]}{2 \sigma_y{ }^2}\right]\right\}+\beta \cdot\left\{-\left(\frac{y-m_y}{\sigma_y^2}\right) \frac{1}{2 \pi \sigma_x \sigma_y} \exp \left[-\frac{\left(x-m_x\right)^2}{2 \sigma_x{ }^2}-\frac{\left(y-m_y\right)^2}{2 \sigma_y^2}\right]\right\}\end{array}
\begin{gathered}G\left(x, y, \sigma_x, \sigma_y, m_x, m_y, \alpha, \beta\right)=\frac{1}{2 \pi \sigma_x \sigma_y} \exp \left[-\frac{\left(x-m_x\right)^2}{2 \sigma_x^2}-\frac{\left(y-m_y\right)^2}{2 \sigma_y^2}\right]\left[1-\alpha \cdot\left(\frac{x-m_x}{\sigma_x^2}\right)-\right. \left.\beta \cdot\left(\frac{y-m_y}{\sigma_y^2}\right)\right]\end{gathered} (17)
For 2D the constants are calculated using formulas for a given matrix A of size m x n: m_x=\frac{1}{n} \sum_{j=1}^n A(i, j) for each i; m_y=\frac{1}{m} \sum_{i=1}^m A(i, j) for each j.
5.5 Numerical example of proposed methodology
In order to display the numerical calculation of the above designed filters, consider a sample pixel 5×5 matrix from the image given in Figure 1.
Let
A=\left[\begin{array}{lllll}102 & 168 & 199 & 209 & 195 \\ 158 & 195 & 202 & 190 & 172 \\ 197 & 209 & 197 & 174 & 158 \\ 208 & 206 & 189 & 166 & 157 \\ 190 & 181 & 172 & 159 & 154\end{array}\right]
be the 5×5 pixel matrix and the numerical calculation to obtain denoised matrix using the above-described formulas are demonstrated below. The calculation is done using MATLAB and the following values are obtained:
\begin{aligned}& \begin{array}{l}\text { Image }_{\text {filtered }}=\text { Image }_{\text {original }}+\text { Convolution }_{\text {matrix }} \\\alpha=\left[\begin{array}{ccccc}0.4880 & 0.8038 & 0.9522 & 1 & 0.9330 \\0.7560 & 0.9330 & 0.9665 & 0.9091 & 0.8230 \\0.9426 & 1 & 0.9426 & 0.8325 & 0.7560 \\0.9952 & 0.9856 & 0.9043 & 0.7943 & 0.7512 \\0.9091 & 0.8660 & 0.8230 & 0.7608 & 0.7368\end{array}\right] ; \\\beta=\left[\begin{array}{ccccc}0.4904 & 0.7596 & 0.9471 & 1 & 0.9135 \\0.8038 & 0.9330 & 1 & 0.9856 & 0.8660 \\0.9851 & 1 & 0.9752 & 0.9356 & 0.8515 \\1 & 0.9091 & 0.8325 & 0.7943 & 0.7608 \\0.9135 & 0.8821 & 0.8103 & 0.8051 & 0.7897\end{array}\right]\end{array} \\& m_x=\left[\begin{array}{c}171 \\191.8 \\191.8 \\179.6 \\167.2\end{array}\right] m_y=\left[\begin{array}{c}174.6 \\183.4 \\187 \\185.2 \\171.2\end{array}\right] ; \\& \sigma_x=\left[\begin{array}{l}38.9204 \\18.1769 \\19.0221 \\21.3897 \\13.9628\end{array}\right] ; \sigma_y=\left[\begin{array}{l}38.7536 \\16.1196 \\18.4065 \\20.6436 \\13.3776\end{array}\right] ; \\& \sigma=24.0807 ; m=180.28\end{aligned}
Using AGD-1D:
\begin{gathered}\text { Convolution matrix }\left(C_x\right)= \\ =\left[\begin{array}{ccccc}25.83 & 34.54 & 42.28 & 34.73 & 25.67 \\ 35.37 & 46.56 & 56.59 & 45.71 & 33.43 \\ 43.97 & 57.55 & 69.84 & 55.91 & 40.78 \\ 36.50 & 46.87 & 56.23 & 44.08 & 31.65 \\ 27.70 & 35.17 & 42.01 & 32.46 & 23.11\end{array}\right] \\ A_{A G D-1 D} \text { Filter }=A+C_x \\ =\left[\begin{array}{llllll}127.83 & 202.54 & 241.28 & 243.73 & 220.67 \\ 193.37 & 241.56 & 258.59 & 235.71 & 205.43 \\ 240.97 & 266.55 & 266.84 & 229.91 & 198.78 \\ 244.50 & 252.87 & 245.23 & 210.08 & 188.65 \\ 217.70 & 216.17 & 214.01 & 191.46 & 177.11\end{array}\right] \\ \cong\left[\begin{array}{lllll}128 & 203 & 241 & 244 & 221 \\ 193 & 242 & 259 & 236 & 205 \\ 241 & 267 & 267 & 230 & 199 \\ 245 & 253 & 245 & 210 & 189 \\ 218 & 216 & 214 & 191 & 177\end{array}\right]\end{gathered}
=\left[\begin{array}{lllll}128 & 203 & 241 & 244 & 221 \\ 193 & 242 & 255 & 236 & 205 \\ 241 & 255 & 255 & 230 & 199 \\ 245 & 253 & 245 & 210 & 189 \\ 218 & 216 & 214 & 191 & 177\end{array}\right]
Using AGD-2D:
\begin{aligned}& C_x=\left[\begin{array}{lllll}0.56 & 0.77 & 0.95 & 0.80 & 0.60 \\0.78 & 1.04 & 1.28 & 1.04 & 0.77 \\1.19 & 1.58 & 1.94 &1.59 & 1.17 \\1.18 & 1.53 & 1.85 & 1.46 & 1.06 \\0.90 & 1.15 & 1.38 & 1.07 & 0.77\end{array}\right] \\& A_{A G D-2 D} \text { Filter } \\& =\left[\begin{array}{lllll}102.56 & 168.77 & 199.95 & 209.80 & 195.60 \\158.78 & 196.04 & 203.28 & 191.04 & 172.77 \\198.19 & 210.58 & 198.94 & 175.59 & 159.17 \\209.18 & 207.53 & 190.85 & 167.46 & 158.06 \\190.90 & 182.15 & 173.38 & 160.07 & 154.77\end{array}\right] \\ & \cong\left[\begin{array}{lllll}103 & 169 & 200 & 210 & 196 \\159 & 196 & 203 & 191 & 173 \\198 & 211 & 199 & 176 & 159 \\209 & 208 & 191 & 167 & 158 \\191 & 182 & 173 & 160 & 155\end{array}\right]\end{aligned}
Using AFGD-1D:
\begin{aligned}& C_x=\left[\begin{array}{lllll}52.94 & 37.06 & 38.10 & 25.80 & 31.08 \\38.56 & 24.69 & 10.14 & 30.13 & 27.11 \\27.07 & 37.11 & 23.97 & 19.16 & 40.83 \\29.06 & 19.09 & 45.54 & 23.82 & 56.50 \\13.75 & 49.57 & 20.61 & 20.49 & 41.07\end{array}\right] \\& A_{A F G D-1 D F i l t e r} \\& =\left[\begin{array}{lllll}154.94 & 168.06 & 199.10 & 209.10 & 195.08 \\158.56 & 195.09 & 202.14 & 190.13 & 172.11 \\198.07 & 209.11 & 197.17 & 174.16 & 158.13 \\208.06 & 206.09 & 189.14 & 166.12 & 157.10 \\190.75 & 181.07 & 172.11 & 159.09 &154.07\end{array}\right] \\& \cong\left[\begin{array}{lllll}155 & 168 & 199 & 209 & 195 \\159 & 195 & 202 & 190 & 172 \\198 & 209 & 197 & 174 & 158 \\208 & 106 & 189 & 166 & 157 \\191 & 181 & 172 & 159 & 154\end{array}\right]\end{aligned}
Using AFGD-2D:
\begin{aligned}& C_x=\left[\begin{array}{lllll}0.26 & 0.48 & 1.48 & 0.98 & 0.83 \\0.26 & 058 & 1.47 & 0.29 & 0.92 \\0.24 & 0.33 & 0.44 & 0.93 & 0.27 \\0.92 & 0.57 & 0.08 & 0.63 & 1.98 \\0.85 & 1.93 & 0.81 & 1.02 & 1.05\end{array}\right] \\& A_{A F G D-2 D} \text { Filter } \\ & =\left[\begin{array}{lllll}102.26 & 168.48 & 200.48 & 209.98 & 195.83 \\158.26 & 195.58 & 203.47 & 190.29 & 172.92 \\197.24 & 209.33 & 197.44 & 174.93 & 158.27 \\208.92 & 206.57 & 189.08 & 166.63 & 158.98 \\190.85 & 182.93 & 172.81 & 160.02 & 155.05\end{array}\right] \\ & \cong\left[\begin{array}{lllll}102 & 168 & 200 & 210 & 196 \\158 & 196 & 203 & 190 & 173 \\197 & 209 & 197 & 175 & 158 \\209 & 207 & 189 & 167 & 159 \\191 & 182 & 173 & 160 & 155\end{array}\right]\end{aligned}
The performance analysis process in image processing is a critical step for evaluating the effectiveness of various techniques and algorithms. This multifaceted assessment involves the application of quantitative metrics to gauge the quality of processed images. Common performance metrics include the Root Mean Squared Error (RMSE) and Peak Signal-to-Noise Ratio (PSNR), which measure the difference and similarity between the original and processed images, respectively. Comparative studies between different filters or algorithms provide insights into their strengths and weaknesses, aiding practitioners in making informed choices for specific applications. The performance analysis process is crucial for advancing the field, enabling the identification of optimal solutions and fostering continuous improvement in image processing methodologies.
6.1 Root Mean Squared Error
Root Mean Squared Error (RMSE) is a widely used metric in image processing and various other fields to quantify the difference between predicted or processed values and the actual or reference values. It is particularly useful for assessing the accuracy and fidelity of reconstructed or filtered images. The RMSE is calculated by taking the square root of the mean of the squared differences between corresponding pixel values in the original and processed images. The mathematical formula for RMSE is as follows:
R M S E=\sqrt{\frac{1}{N} \sum_{i=1}^N\left(I_i-\hat{I}_i\right)^2} (18)
where, N is the total number of pixels in the image, Ii is the intensity value of the ith pixel in the original image, \hat{I}_i is the intensity value of the ith pixel in the processed or reconstructed image. In Figure 2, the work flow is shown as flow chart.
Figure 2. Explains the proposed work flow
6.2 Peak Signal-to-Noise Ratio (PSNR)
Peak Signal-to-Noise Ratio (PSNR) is a widely used metric in image processing to assess the quality of a reconstructed or processed image by comparing it to a reference or original image. PSNR is expressed as a ratio of the peak signal level to the Root Mean Squared Error (RMSE) between corresponding pixel values in the original and processed images. It provides a quantitative measure of the fidelity and similarity between the two images. The mathematical formula for PSNR is given by:
PSNR=10.lo{{g}_{10}}\left( \frac{Peak~Signal~Valu{{e}^{2}}}{Mean~Squared~Error} \right) (19)
where, Peak Signal Value is the maximum possible pixel value, Mean Squared Error is the mean of the squared differences between corresponding pixel values in the original and processed image.
The major objective of this work is to design an Adaptive Gaussian Filter by combining the gaussian function and its derivative and the resultant is used as filter for denoising the image. Also, to compare the performance of the adaptive gaussian filter with each other. The filtered images results are shown in Figure 3. The images taken for the proposed work is the secondary data taken from Kaggle.
|
Algorithm: Adaptive Gaussian Filter-Based Denoising |
|
Input: Noisy Image (I) Output: Denoised Image (I_denoised) 1. Initialize Parameters: a. Read the image as grayscale image. b. Set initial Gaussian filter parameters 2. Analyze the Noisy Image: a. Estimate local noise characteristics (e.g., noise level, variance) 3. Adaptive Adjustment of Filter Parameters: a. Adjust Gaussian filter parameters based on the estimated local noise characteristics. 5. Evaluate Denoising Performance: a. Calculate quality metrics (e.g., PSNR, RMSE) to assess the performance of the denoising process. End Algorithm |
Figure 3. Filtered image after using adaptive filters for noise density =0.06
Table 1. RMSE value for speckle noise
|
Noise Density |
1D Gaussian |
2D Gaussian |
1D Derivative |
2D Derivative |
AGD-1D |
AGD-2 D |
AFGD-1D |
AFGD-2D |
|
0.01 |
7.109147881 |
9.51227493 |
48.35614443 |
46.49438233 |
4.4315 |
7.0499 |
3.6751 |
13.0718 |
|
0.02 |
7.671172547 |
9.835913216 |
48.22640418 |
46.40444893 |
4.7316 |
7.1425 |
3.9752 |
13.096 |
|
0.03 |
8.210896484 |
10.14732279 |
48.0989115 |
46.28819597 |
5.0585 |
7.2675 |
4.3021 |
13.1154 |
|
0.04 |
8.707606813 |
10.42382294 |
48.02646318 |
46.22959589 |
5.3075 |
7.3423 |
4.5511 |
13.1333 |
|
0.05 |
9.080211021 |
10.61466951 |
47.94066323 |
46.15142981 |
5.5821 |
7.4365 |
4.8257 |
13.1506 |
|
0.06 |
9.60487158 |
10.90986684 |
47.8783036 |
46.11420211 |
5.8534 |
7.5641 |
5.097 |
13.1673 |
|
0.07 |
9.990753023 |
11.14869392 |
47.79922848 |
46.0557318 |
6.1168 |
7.6674 |
5.3604 |
13.1814 |
|
0.08 |
10.34709934 |
11.3494867 |
47.7208218 |
45.96744576 |
6.3838 |
7.7944 |
5.6274 |
13.1929 |
|
0.09 |
10.66651743 |
11.49004254 |
47.67081004 |
45.93751735 |
6.5836 |
7.8929 |
5.8272 |
13.208 |
|
0.1 |
11.08357009 |
11.77125603 |
47.60464728 |
45.87470046 |
6.8535 |
8.0119 |
6.0971 |
13.2192 |
Table 2. PSNR values of speckle noise
|
Noise Density |
1D Gaussian |
2D Gaussian |
1D Derivative |
2D Derivative |
AGD-1D |
AGD-2 D |
AFGD-1D |
AFGD-2D |
|
0.01 |
31.09445264 |
28.56511573 |
14.44177029 |
14.78279396 |
35.2 |
31.1673 |
56.6179 |
36.0645 |
|
0.02 |
30.43356858 |
28.27450984 |
14.46510598 |
14.79961122 |
34.6307 |
31.0539 |
56.4605 |
35.4952 |
|
0.03 |
29.84299207 |
28.00377409 |
14.48809865 |
14.82139851 |
34.0504 |
30.9033 |
56.3343 |
34.9149 |
|
0.04 |
29.3328274 |
27.77026309 |
14.50119151 |
14.83240167 |
33.6331 |
30.8143 |
56.2182 |
34.4976 |
|
0.05 |
28.96888478 |
27.61267407 |
14.51672285 |
14.8471004 |
33.195 |
30.7035 |
56.1065 |
34.0595 |
|
0.06 |
28.48097236 |
27.37441462 |
14.52802852 |
14.85410964 |
32.7828 |
30.5557 |
55.9989 |
33.6473 |
|
0.07 |
28.13883915 |
27.18632376 |
14.54238587 |
14.86512986 |
32.4004 |
30.438 |
55.9082 |
33.2649 |
|
0.08 |
27.83443124 |
27.0312792 |
14.55664533 |
14.88179616 |
32.0294 |
30.2953 |
55.8337 |
32.8939 |
|
0.09 |
27.57035066 |
26.92437088 |
14.56575297 |
14.8874532 |
31.7617 |
30.1861 |
55.7366 |
32.6262 |
|
0.1 |
27.23721017 |
26.71434749 |
14.57781657 |
14.89933878 |
31.4126 |
30.0562 |
55.665 |
32.2771 |
Table 3. RMSE value for salt and pepper noise
|
Noise Density |
1D Gaussian |
2D Gaussian |
1D Derivative |
2D Derivative |
AGD-1D |
AGD-2 D |
AFGD-1D |
AFGD-2D |
|
0.01 |
11.11702861 |
10.21946771 |
48.61942732 |
46.54211052 |
6.285 |
7.7701 |
4.1974 |
13.0604 |
|
0.02 |
14.44717898 |
11.5344193 |
48.63665398 |
46.43533838 |
7.9623 |
8.5877 |
5.8747 |
13.0778 |
|
0.03 |
17.50551308 |
12.93244987 |
48.67265104 |
46.3265297 |
9.3603 |
9.3822 |
7.2727 |
13.0931 |
|
0.04 |
19.63295042 |
14.04488319 |
48.69226808 |
46.26227233 |
10.7906 |
10.2824 |
8.703 |
13.1083 |
|
0.05 |
22.05272295 |
15.36976576 |
48.7141882 |
46.17514423 |
12.0355 |
11.1279 |
9.9479 |
13.1243 |
|
0.06 |
23.9057489 |
16.46080945 |
48.72247308 |
46.10760899 |
13.1609 |
11.9145 |
11.0733 |
13.1369 |
|
0.07 |
25.82604815 |
17.64797129 |
48.74933894 |
46.06733781 |
14.4544 |
12.9025 |
12.3668 |
13.149 |
|
0.08 |
27.51779109 |
18.68339019 |
48.7829182 |
46.06149024 |
15.4735 |
13.6981 |
13.3859 |
13.1661 |
|
0.09 |
29.32424472 |
19.93126336 |
48.80346442 |
46.0127109 |
16.5842 |
14.6072 |
14.4966 |
13.1775 |
|
0.1 |
31.16517892 |
21.20821542 |
48.87401754 |
46.02980714 |
17.7571 |
15.555 |
14.6695 |
13.1899 |
Table 4. PSNR value of salt and pepper noise
|
Noise Density |
1D Gaussian |
2D Gaussian |
1D Derivative |
2D Derivative |
AGD-1D |
AGD-2 D |
AFGD-1D |
AFGD-2D |
|
0.01 |
27.21102914 |
27.9422381 |
14.39460683 |
14.77388215 |
32.1649 |
30.3224 |
56.6922 |
33.0625 |
|
0.02 |
24.93514255 |
26.89088891 |
14.39152982 |
14.79383132 |
30.1101 |
29.4534 |
56.5788 |
31.0077 |
|
0.03 |
23.26730672 |
25.89718754 |
14.38510358 |
14.81420824 |
28.7051 |
28.6848 |
56.4793 |
29.6027 |
|
0.04 |
22.27109221 |
25.18044098 |
14.38160352 |
14.82626439 |
27.47 |
27.889 |
56.3803 |
28.3676 |
|
0.05 |
21.26155918 |
24.39745863 |
14.37769422 |
14.8426384 |
26.5216 |
27.2026 |
56.2767 |
27.4192 |
|
0.06 |
20.56075654 |
23.80177986 |
14.37621712 |
14.85535158 |
25.7452 |
26.6094 |
56.1949 |
26.6428 |
|
0.07 |
19.88964448 |
23.19690784 |
14.37142899 |
14.8629413 |
24.9309 |
25.9174 |
56.1168 |
25.8285 |
|
0.08 |
19.33853222 |
22.70168993 |
14.36544808 |
14.86404392 |
24.3391 |
25.3977 |
56.0063 |
25.2367 |
|
0.09 |
18.7862669 |
22.14010706 |
14.36179056 |
14.87324719 |
23.737 |
24.8395 |
55.9329 |
24.6346 |
|
0.1 |
18.25741112 |
21.60072109 |
14.3492428 |
14.8700205 |
23.1435 |
24.2935 |
55.8533 |
24.0411 |
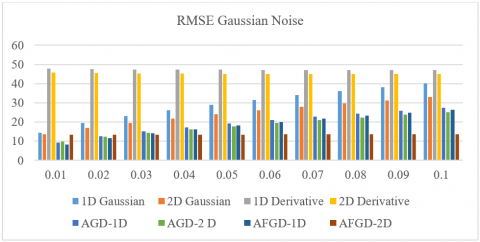
Table 5. RMSE values of Gaussian noise
|
Noise Density |
1D Gaussian |
2D Gaussian |
1D Derivative |
2D Derivative |
AGD-1D |
AGD-2 D |
AFGD-1D |
AFGD-2D |
|
0.01 |
14.45374646 |
13.49420509 |
47.75976741 |
45.82554865 |
9.2092 |
9.8082 |
6.3197 |
13.2281 |
|
0.02 |
19.34256992 |
16.83674224 |
47.47599651 |
45.51995165 |
12.4663 |
12.2058 |
9.5768 |
13.3152 |
|
0.03 |
22.99063698 |
19.4753713 |
47.34050229 |
45.36223612 |
15.0327 |
14.2439 |
12.1432 |
13.3733 |
|
0.04 |
26.17116478 |
21.83692253 |
47.2459628 |
45.23099926 |
17.1824 |
16.9282 |
14.2929 |
13.4173 |
|
0.05 |
28.94662331 |
23.98696408 |
47.19347487 |
45.1444431 |
19.0999 |
17.6862 |
15.2104 |
13.4539 |
|
0.06 |
31.55328362 |
26.06022579 |
47.13545949 |
45.02103329 |
21.082 |
19.4344 |
16.1925 |
13.4786 |
|
0.07 |
33.91014375 |
27.91011346 |
47.13329082 |
45.01382967 |
22.7703 |
20.9124 |
19.8808 |
13.5032 |
|
0.08 |
36.08758531 |
29.63753666 |
47.1157946 |
44.99458047 |
24.3868 |
22.389 |
21.4973 |
13.5209 |
|
0.09 |
38.07428237 |
31.28258924 |
47.10518741 |
44.93996311 |
25.8149 |
23.6889 |
22.9254 |
13.5402 |
|
0.1 |
40.03755472 |
32.91757745 |
47.1501727 |
44.96015887 |
27.3009 |
25.0351 |
24.4114 |
13.5549 |
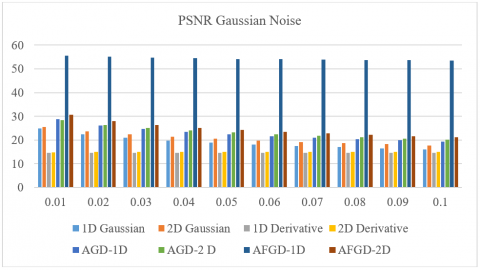
Table 6. PSNR value of gaussian noise
|
Noise Density |
1D Gaussian |
2D Gaussian |
1D Derivative |
2D Derivative |
AGD-1D |
AGD-2 D |
AFGD-1D |
AFGD-2D |
|
0.01 |
24.93119496 |
25.52785748 |
14.54955955 |
14.90865014 |
28.8464 |
28.2991 |
55.608 |
30.6094 |
|
0.02 |
22.4005201 |
23.60564234 |
14.60132182 |
14.96676777 |
26.2161 |
26.3995 |
55.0532 |
27.9791 |
|
0.03 |
20.89978353 |
22.34108869 |
14.62614638 |
14.99691451 |
24.5901 |
25.0583 |
54.6862 |
26.3531 |
|
0.04 |
19.77434257 |
21.34697494 |
14.64350954 |
15.02207996 |
23.4291 |
24.0331 |
54.41 |
25.1921 |
|
0.05 |
18.89884542 |
20.53129791 |
14.65316449 |
15.03871761 |
22.5102 |
23.1781 |
54.1808 |
24.2732 |
|
0.06 |
18.14991238 |
19.81124012 |
14.66384871 |
15.06249444 |
21.6526 |
22.3594 |
54.0272 |
23.4156 |
|
0.07 |
17.52421099 |
19.21557157 |
14.66424835 |
15.06388434 |
20.9835 |
21.7227 |
53.8746 |
22.7465 |
|
0.08 |
16.98364714 |
18.69396153 |
14.66747321 |
15.06759947 |
20.3877 |
21.1301 |
53.7645 |
22.1507 |
|
0.09 |
16.51816908 |
18.22474976 |
14.66942889 |
15.07814938 |
19.8934 |
20.6399 |
53.6455 |
21.6564 |
|
0.1 |
16.0814527 |
17.78224629 |
14.66113785 |
15.07424686 |
19.4073 |
20.1598 |
53.5545 |
21.1703 |
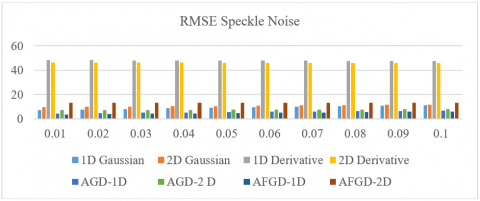
Figure 4. RMSE of different filters adding speckle noise
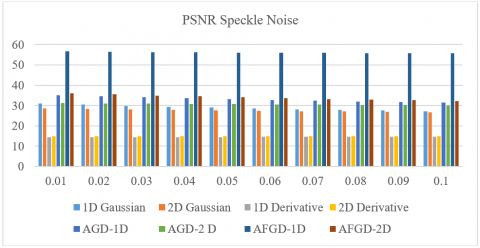
Figure 5. PSNR of different filters added speckle noise
Figure 6. RMSE of different filters added salt and pepper noise
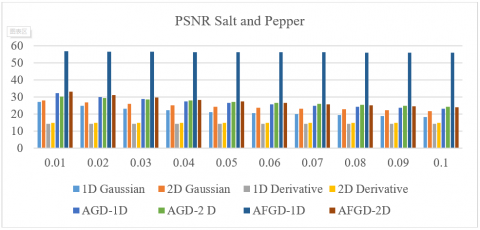
Figure 7 PSNR of different filters added salt and pepper noise
Figure 8. RMSE of different filters added gaussian noise
Figure 9. PSNR of different filters added salt and gaussian noise
An MRI image was taken and different noises were added and the RMSE and PSNR value where calculated and the results are shown in Tables 1-6 and their corresponding graphical representation is shown in Figures 4-9. The MATLAB software was used for the execution of algorithm. In this, four Adaptive gaussian filter is proposed namely AGD-1D, AGD-2D, AFGD-1D, AFGD-2D. The performance of the filter is calculated using the statistical method PSNR and RMSE. The calculated value is compared with some basic gaussian filter namely Gaussian 1D filter, Gaussian 2D filter. Derivative of Gaussian 1D filter and Derivative of Gaussian 2D filter. The results are shown in the Tables 1-6. From the tabulation it can be concluded that the adaptive filter works effectively. Also, the performance of AFGD-1D gives the best results at different level of noises. It can also be noticed that the AFGD-1D filter works better in different noises.
The major objective of this work is to design an Adaptive Gaussian Filter for denoising technique and to compare the performance of the four adaptive gaussian filter with each other and also with gaussian traditional filters. An MRI image is considered for this proposed methodology. The denoising filters are used at different noise intensity level. This paper mainly focuses on the pre-processing level of image processing. The performance of the filters was analyzed using the statistical values like RMSE and PSNR. From the results, it is evident that the adaptive filter namely AFGD-1D works better in comparison of other gaussian filters at different noise intensity level. Further this can be extended to other level of image processing like image classification and image segmentation. Also more fuzzy logic techniques can be applied in other stages for reducing the uncertainty.
[1] Suneetha, A., Srinivasa Reddy, E. (2020). Robust Gaussian noise detection and removal in color images using modified fuzzy set filter. Journal of Intelligent Systems, 30(1): 240-257. https://doi.org/10.1515/jisys-2019-0211
[2] Kaur, A., Dong, G. (2023). A complete review on image denoising techniques for medical images. Neural Processing Letters, 55(6): 7807-7850. https://doi.org/10.1007/s11063-023-11286-1
[3] Atanassov, K. (1986). Intuitionistic fuzzy sets. Fuzzy Sets and Systems, 20: 87-96.
[4] Kumar, S.S. (2018). Medical image segmentation by modified fuzzy logic algorithm. International Journal of Advanced Research Trends in Engineering and Technology, 5.
[5] Harishvijey, A., Raja, J.B. (2022). Automated technique for EEG signal processing to detect seizure with optimized variable gaussian filter and fuzzy RBFELM classifier. Biomedical Signal Processing and Control, 74: 103450. https://doi.org/10.1016/j.bspc.2021.103450
[6] Kulikova, M.V., Kulikov, G.Y. (2023). On derivative-free extended Kalman filtering and its Matlab-oriented square-root implementations for state estimation in continuous-discrete nonlinear stochastic systems. European Journal of Control, 73: 100886. https://doi.org/10.1016/j.ejcon.2023.100886
[7] Zaynidinov, H., Juraev, J., Juraev, U. (2020). Digital image processing with two-dimensional Haar wavelets. International Journal of Advanced Trends in Computer Science and Engineering, 9(3): 38932020. https://doi.org/10.30534/ijatcse/2020/38932020
[8] Kumar, S.S. (2015). Analysis of brain tumor using undecimated wavelet transform and neural network. International Journal of Applied Engineering Research
[9] Zhu, W. (2019). A first-order image denoising model for staircase reduction. Advances in Computational Mathematics, 45(5): 3217-3239. https://doi.org/10.1007/s10444-019-09734-5
[10] Siddig, A., Guo, Z., Zhou, Z., Wu, B. (2018). An image denoising model based on a fourth-order nonlinear partial differential equation. Computers & Mathematics with Applications, 76(5): 1056-1074. https://doi.org/10.1016/j.camwa.2018.05.040
[11] Palma, C.A., Cappabianco, F.A., Ide, J.S., Miranda, P.A. (2014). Anisotropic diffusion filtering operation and limitations-magnetic resonance imaging evaluation. IFAC Proceedings Volumes, 47(3): 3887-3892. https://doi.org/10.3182/20140824-6-ZA-1003.02347
[12] Yuan, J., He, G. (2008). Application of an anisotropic diffusion based preprocessing filtering algorithm for high resolution remote sensing image segmentation. In 2008 Congress on Image and Signal Processing, Sanya, China, pp. 629-633. https://doi.org/10.1109/CISP.2008.318
[13] Shahin, A.I., Amin, K.M., Sharawi, A.A., Guo, Y. (2018). A novel enhancement technique for pathological microscopic image using neutrosophic similarity score scaling. Optik, 161: 84-97. https://doi.org/10.1016/j.ijleo.2018.02.026
[14] Khan, M., Rehman, R.F.U., Anis, S., Zeeshan, M. (2022). Denoising data in signal processing under the complex fuzzy environment. Preprint. https://doi.org/10.21203/rs.3.rs-1580891/v1
[15] Ali, H.M. (2018). MRI medical image denoising by fundamental filters. High-Resolution Neuroimaging-Basic Physical Principles and Clinical Applications, 14: 111-124.
[16] Kadhim, M.A. (2021). Restoration medical images from speckle noise using multifilters. In 2021 7th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, pp. 1958-1963. https://doi.org/10.1109/ICACCS51430.2021.9441814
[17] Fan, L., Zhang, F., Fan, H., Zhang, C. (2019). Brief review of image denoising techniques. Visual Computing for Industry, Biomedicine, and Art, 2(1): 7.
[18] Simoncelli, E.P. (1994). Design of multi-dimensional derivative filters. In Proceedings of 1st International Conference on Image Processing, Austin, TX, USA, pp. 790-794. https://doi.org/10.1109/ICIP.1994.413423
[19] Zhang, J., He, X., Zhou, D. (2016). Generalised proportional–integral–derivative filter. IET Control Theory & Applications, 10(17): 2339-2347. https://doi.org/10.1049/iet-cta.2015.0610
[20] Kopparapu, S.K., Satish, M. (2011). Identifying optimal gaussian filter for gaussian noise removal. In 2011 Third National Conference on Computer Vision, Pattern Recognition, Image Processing and Graphics, Hubli, India, pp. 126-129. https://doi.org/10.1109/NCVPRIPG.2011.34
[21] Deng, G., Cahill, L.W. (1993). An adaptive Gaussian filter for noise reduction and edge detection. In 1993 IEEE Conference Record Nuclear Science Symposium and Medical Imaging Conference, Francisco, CA, USA, pp. 1615-1619. https://doi.org/10.1109/NSSMIC.1993.373563
[22] D'Haeyer, J.P.F. (1989). Gaussian filtering of images: A regularization approach. Signal Processing, 18(2): 169-181. https://doi.org/10.1016/0165-1684(89)90048-0
[23] Keilmann, A., Godehardt, M., Moghiseh, A., Redenbach, C., Schladitz, K. (2023). Improved anisotropic gaussian filters, computer vision and pattern recognition. arXiv:2303.13278. https://doi.org/10.48550/arXiv.2303.13278
[24] Singh, A.K. (2020). Major development under Gaussian filtering since unscented Kalman filter. IEEE/CAA Journal of Automatica Sinica, 7(5): 1308-1325. https://doi.org/10.1109/JAS.2020.1003303
[25] Paul, S. (2024). A gaussian filter-based window for efficient SAR image matching. Journal of Spatial Science, 69(2): 681-697. https://doi.org/10.1080/14498596.2023.2274998
[26] Shanmugam, A., Devi, S.R. (2020). A fuzzy model for noise estimation in magnetic resonance images. IRBM, 41(5): 261-266. https://doi.org/10.1016/j.irbm.2019.11.005
[27] Zhao, W., Dong, M., Wang, Y., Tan, R., Wu, T. (2024). A novel spectral super-resolution network with dominant information between spatial and spectral domains. Neurocomputing, 590: 127753. https://doi.org/10.1016/j.neucom.2024.127753