Salima Kehali*![]() | Amina Khirani
| Amina Khirani![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The objective of this study is to solve Linear Volterra-Fredholm Integral Equations of the second kind numerically using Hermite polynomials. We will present an approximate solution as a series that converges towards the exact solution. Several examples are provided to illustrate the numerical results, specifically comparing the exact and numerical solutions. These comparisons are shown in tables, demonstrating that the error between the exact and numerical solutions is negligible. Additionally, diagrams highlight how closely the numerical solution matches the exact solution, underscoring the accuracy of the grouping method used to solve the Volterra-Fredholm Integral Equation with the MATLAB program. This method is noted for its simplicity, speed, and high accuracy in obtaining numerical results.
Linear Volterra-Fredholm Integral Equation, shifted Hermite polynomials, collocation method
The integral equations form the basis of several mathematical models in many scientific domains, such as engineering, mathematics, and chemistry. Numerous areas in engineering and applied mathematics are connected to integral equations as defined in the study conducted by Wazwaz [1] and Semenova et al. [2].
The Volterra-Fredholm Integral Equations have played a major role in developing many crucial in applied mathematics, engineering, and physics [3], and have found extensive application in various scientific fields. The Volterra and Fredholm integral equations are combined to create these integral equations.
We define the Linear Volterra-Fredholm Integral Equations of the second kind (LVFIES for short) as follows [3-5]:
$\begin{gathered}\lambda(\tau)-\int_{-1}^\tau h_1(\tau, v) \lambda(v) d v-\int_{-1}^1 h_2(\tau, v) \lambda(v) d v=f(\tau) \\ -1 \leq \tau, v \leq 1\end{gathered}$ (1)
In the case where f(τ), h1(τ, ν) and h2(τ, ν) are functions. The function λ(τ) is the unknown function that must be determined. There are many techniques for properly effectively resolving such problems [6, 7], such as Adomian's method [8, 9], Chebyshev polynomials [10-12], They serviced the Volterra Friedolm integral equation using a Chebychev polynomial with summation points. Then they proposed a new summation method to solve the Volterra Fredholm equation, Euler series to solve the Fredholm integral equation [13], Laplace transform method [14, 15].
In this context, Salman Mustfaf [16] presented an innovative method for solving linear fractional Volterra-Fredholm Integro-Differential Equations (LFVFIDEs) with fractional derivatives in the Caputo sense. To validate the effectiveness of this new approach, it is compared with existing techniques, demonstrating its superior performance in addressing these complex problems. Varol et al. [17] analyzed the application of Laguerre polynomials in constructing a numerical approximation method for solving fractional linear integral-differential equations (IDEs) of the Fredholm-Volterra type.
Negarchi and Nouri [18], and Nemati [19] discussed solutions to the integral equation using the Legendre polynomial.
In our work, we use Hermite polynomials to solve the Volterra-Fredholm equation integral. In the context of numerical methods, convergence analysis is crucial to ensure that the method reliably approximates the exact solution as the number of terms increases.
The paper’s structure is: introductory section contains an introduction to the LVFIES, in the second one, we demonstrate the existence and the uniqueness of the solution of the LVFIES, and then we introduce definitions about the Hermite polynomials, which is the basis of our work in the third section. In the fourth one, we put the description of the collocation Hermite method to solve LVFIES we search for an approximate solution in the form of series. In the fifth section, numerical examples are presented to demonstrate the accuracy and efficiency of the current method. Finally, the conclusions of this work are summarized.
There are multiple theorems that demonstrate the existence and unicity of the LVFIES solutions, we present one of them Theorem suppose the Eq. (1), such that:
$\begin{gathered}f \in C[-1,1] \\ h_1(\tau, v) \in C(K), K=\left\{(\tau, v) \in R^2,-1 \leq \tau \leq v \leq 1\right\} \\ \lambda \in C\left([-1,1], h_2(\tau, v) \in C[-1,1] \times[-1,1]\right) \\ N_1=\max h_1(\tau, v)[-1,1] \times[-1,1] \\ N_2=\max h_2(\tau, v)[-1,1] \times[-1,1]\end{gathered}$
Under the continuity conditions above suppose that there is a constant C>0 such that:
$\frac{1}{C}\left(N_1+N_2 e^{2 C}\right)$
Then the Eq. (1) has a unique solution λ∈C(-1, 1] and this solution can be obtained by the successive approximation method.
Proof
Let the integral operator ζ: C([-1, 1]→C([-1, 1]) defined by:
$\zeta \lambda(\tau)=\int_{-1}^\tau h_1(\tau, v) \lambda(v) d v-\int h_2(\tau, v) \lambda(v) d v=f(\tau)$
We have:
$\begin{aligned} & |\zeta \lambda(\tau)-\zeta \psi(\tau)|=\left|\int_{-1}^\tau h_1(\tau, v)(\lambda(v)-\psi(v)) d v-\int_{-1}^1 h_2(\tau, v)(\lambda(v)-\psi(v)) d v\right| \\ & \leq \int_{-1}^\tau\left|h_1(\tau, v)\right||\lambda(v)-\psi(v)| d v+\left.\int_{-1}^1\right|_2(\tau, v)|| \lambda(v)-\psi(v) \mid d v \\ & \leq N_1 \int_{-1}^\tau|\lambda(v)-\psi(v)| e^{(-C(v+1))} e^{(C(v+1))} d v \\ & +N_2 \int_{-1}^1|\lambda(v)-\psi(v)| e^{(-C(v+1))} e^{(C(v+1))} d v \\ & \leq \frac{N_1}{C}\left(e^{(C(\tau+1)}-1\right)+\frac{N_2}{C}\left(e^{2 C}-1\right)\|\lambda-\psi\| \\ & \leq \frac{N_1}{C} e^{(C(\tau+1)}+\frac{N_2}{C}\left(e^{(C(\tau-\tau+1+1)}-1\right)\|\lambda-\psi\| \\ & \leq \frac{1}{C} e^{C(\tau+1)}\left(N_1+N_2\left(e^{C(1-\tau)}\right)\right)\|\lambda-\psi\| \\ & \leq \frac{1}{C} e^{C(\tau+1)}\left(N_1+N_2\left(e^{2 C}\right)\right)\|\lambda-\psi\|\end{aligned}$
Consequently:
$|\zeta \lambda(\tau)-\zeta \psi(\tau)| e^{(C(\tau+1))} \leq \frac{1}{C}\left(N_1+N_2\left(e^{2 C}\right)\|\lambda-\psi\|\right.$
for every t∈[-1, 1]:
So:
$\|\zeta \lambda-A \psi\| \leq \frac{1}{C}\left(N_1+N_2\left(e^{2 C}\right)\|\zeta-\psi\|\right.$
We conclude that the operator ζ is Lipschitzian with constant:
$k=\frac{1}{C}\left(N_1+N_2 e^{2 C}\right)$
The assumed condition guarantees that ζ is a contraction. So, the operator ζ has a unique solution which is the solution of Eq. (1).
Hermite polynomials are a series of orthogonal polynomials that appear in probability theory, physics, and numerical analysis.
Hermite polynomials are defined by its general form [20, 21]:
$H t_n(\tau)=(-1)^n e^{\frac{\tau^2}{2}} \frac{d^n}{d \tau^n} e^{-\frac{\tau^2}{2}} \quad, n=0,1,2 \ldots ,-\infty<\tau<+\infty$
The first seven Hermite polynomials are:
$\begin{aligned} & H t_0(\tau)=1, \\ & H t_1(\tau)=2 \tau, \\ & H t_2(\tau)=4 \tau^2-2, \\ & H t_3(\tau)=8 \tau^3-12 \tau, \\ & H t_4(\tau)=16 \tau^4-48 \tau^2+12, \\ & H t_5(\tau)=32 \tau^5-160 \tau^3+120 \tau, \\ & H t_6(\tau)=64 \tau^6-480 \tau^4+720 \tau^2-120, \end{aligned}$
There is orthogonality in the polynomials Htn(τ) with respect to the weight function $S(\tau)=e^{-\frac{\tau^2}{2}}$ with the following condition:
$\int_{-\infty}^{+\infty} H t_n(\tau) H t_m(\tau) S(\tau) d \tau=n!\sqrt{2 \pi} \delta_{n, m}$ (2)
δn,m denoted the Kronecker delta.
Let:
$\omega_n(\tau)=\frac{1}{\sqrt{n!\sqrt{2 \pi}}} \times H t_n$ (3)
So:
$\left\langle\omega_n, \omega_m\right\rangle=$$\frac{1}{n!\sqrt{2 \pi}} \int_{-\infty}^{+\infty} H t_n(\tau) H t_m(\tau) S(\tau) d \tau=\left\{\begin{array}{l}1 \text { si } n=m \\ 0 \text { si } n \neq m\end{array}\right.$ (4)
The Hermite collocation method is a numerical technique that approximates solutions to Linear Volterra-Fredholm Integral Equations of the second kind (LVFIEs) using Hermite polynomials. Consider the LVFIES:
$\lambda(\tau)-\int_{-1}^\tau h_1(\tau, v) \lambda(v) d v-\int_{-1}^1 h_2(\tau, v) \lambda(v) d v=f(\tau)$
Now, we use the collocation method [22-24] to the Eq. (1), we approximate the unknown function λ(τ), in the form of finite sum as follows:
$\lambda(\tau)=\sum_{k=0}^N a_k \omega_k$ (5)
where, ωk is Hermite polynomials of degree k, ak are unknown parameters, after substituting expression (5) in Eq. (1), it results:
$\sum_{k=0}^{\infty} a_k \omega_k-\int_{-1}^\tau h_1(\tau, v) \sum_{k=0}^N a_k \omega_k(v)-$$\int_{-1}^1 h_2(\tau, v) \sum_{k=0}^N a_k \omega_k(\tau)=f(\tau)$ (6)
The Eq. (6) is transformed into a system of linear equations.
EA=F
where, the conjugate matrix of (3) is written as follows:
$\left[\begin{array}{lccc}E_0\left(\tau_0\right) & E_0\left(\tau_0\right) & \ldots & E_n\left(\tau_0\right) \\ E_0\left(\tau_1\right) & E_0\left(\tau_1\right) & \ldots & E_n\left(\tau_1\right) \\ . . & . . & \ldots & \ldots \\ . . & . . & \ldots & \ldots \\ . . & . . & \ldots & \ldots \\ E_0\left(\tau_n\right) & E_0\left(\tau_n\right) & \ldots & E_n\left(\tau_n\right)\end{array}\right]$ (7)
Such that:
$E_j(\tau)=\omega_j\left(\tau_i\right)-$$\int_{-1}^\tau h_1\left(\tau_i, v\right) \omega_j(\tau) d v-\int_{-1}^1 h_2(\tau, v) \omega_j(r) d v$ (8)
$\begin{aligned} & E_0\left(\tau_0\right)=\omega_0\left(\tau_0\right)-\int_{-1}^\tau h_1\left(\tau_0, v\right) \omega_0(v) d v-\int_{-1}^1 h_2\left(\tau_0, v\right) \omega_0(v) d v \\ & E_n\left(\tau_0\right)=\omega_n\left(\tau_0\right)-\int_{-1}^\tau k_1\left(\tau_0, v\right) \omega_n(v) d v-\int_{-1}^1 k_2\left(\tau_0, v\right) \omega_n(v) d v \\ & E_0\left(\tau_1\right)=\omega_0\left(\tau_1\right)-\int_{-1}^\tau h_1\left(\tau_1, v\right) \omega_0(v) d v-\int_{-1}^1 h_2\left(\tau_1, v\right) \omega_0(v) d v \\ & E_n\left(\tau_1\right)=\omega_n\left(\tau_1\right)-\int_{-1}^\tau h_1\left(\tau_1, v\right) \omega_n(v) d v-\int_{-1}^1 h_2\left(\tau_1, v\right) \omega_n(v) d v \\ & E_0\left(\tau_n\right)=\omega_0\left(\tau_n\right)-\int_{-1}^\tau h_1\left(\tau_n, v\right) \omega_0(v) d v-\int_{-1}^1 h_2\left(\tau_n, v\right) \omega_0(v) d v \\ & E_n\left(\tau_n\right)=\omega_n\left(\tau_n\right)-\int_{-1}^\tau h_1\left(\tau_n, v\right) \omega_n(v) d v-\int_{-1}^1 h_2\left(\tau_n, v\right) \omega_n(v) d v\end{aligned}$
For all i=0, 1, …, N, j=0, 1, …, N. The vectors A and F are given by:
$A=\left[\begin{array}{l}a_0 \\ a_1 \\ \ldots \\ a_n\end{array}\right] \quad \mathrm{F}=\left[\begin{array}{l}f\left(\tau_0\right) \\ f\left(\tau_1\right) \\ \ldots \\ f\left(\tau_n\right)\end{array}\right]$ (9)
computing the coefficients ak so that the interval [-1, 1] satisfies Eq. (6). The equidistant collocation points are taken as follows for this technique:
$S_j=-1+\frac{2 j}{N} \quad j=0, \ldots N$ (10)
The residual is defined as following:
$Z_N(\tau)=\sum_{k=0}^{\infty} a_k \omega_k-\int_{-1}^\tau h_1(\tau, v) \sum_{k=0}^N a_k \omega_k-$$\int_{-1}^1 h_2(\tau, v) \sum_{k=0}^N a_k \omega_k(\tau)-f(\tau)$ (11)
and applying conditions at collocation points, you get:
$Z_N\left(\tau_j\right)=0 \quad j=0,1, \ldots N$ (12)
In this part, we give some illustrative examples to clarify our work
Example 1
Consider the LVFIES
$\lambda(\tau)-\int_0^\tau\left(2 \tau^2 v+1\right) \lambda(v) d v-\int_0^1 \tau(v+1) \lambda(v) d v=f(\tau)$
If we take:
$f(\tau)=-\frac{2}{5} \tau^7-\frac{5}{4} \tau^4+\tau^3-\frac{59}{20} \tau+1$
We get:
$\lambda(\tau)=\tau^3+1$
Applying the Hermite collocation method to approximate the solution λ(τ).
Table 1. Results for Example 1
|
Val of τ |
Ex. Sol |
Error (N=3) |
Error [25] (N=3) |
|
0.0625 |
1.0010e+00 |
1.3323e-15 |
2.3315e-14 |
|
0.01875 |
1.0080e+00 |
4.4409e-16 |
2.3537e-14 |
|
0.3125 |
1.0270e+00 |
4.4409e-16 |
2.4425e-14 |
|
0.4375 |
1.0640e+00 |
8.8818e-16 |
2.5313e-14 |
|
0.5625 |
1.1250e+00 |
1.3327e-15 |
2.6867e-14 |
|
0.6875 |
1.2160e+00 |
1.1102e-15 |
2.8644e-14 |
|
0.8125 |
1.3430e+00 |
1.9984e-15 |
3.0864e-14 |
|
0.9375 |
1.5120e+00 |
2.2204e-15 |
3.3307e-14 |
Figure 1. The exact and the approximate solutions for Example 1 with n=3
Figure 2. The absolute errors for Example 1
In Table 1, we present the error for Example 1 for N=3 then comparing the results with one of Pull Lucas method [25].
Figures 1 and 2 present respectively comparisons of the exact and approximate solution for n=3, and the absolute errors for Example 1.
Example 2
Consider the LVFIES
$\lambda(\tau)-\int_{-1}^\tau e^{-(\tau+v)} \lambda(v) d v-\int_0^1 \lambda(v) d v=f(\tau)$
If we take:
$f(\tau)=e^{-\tau}+e^{-\frac{3 \tau}{2}}+e^{-1}-e^1-e^{\frac{2-\tau}{2}}$
We get:
$\lambda(\tau)=e^{-\tau}$
Table 2. Comparison of the errors for Example 1
|
Val. of τ |
Ex. Sol |
Error (N=8) |
Error (N=10) |
|
-1.00e+00 |
2.7183e+00 |
3.4542e-08 |
0.0909e-09 |
|
-0.80e+00 |
2.2255e+00 |
2.5994e-08 |
2.6259e-09 |
|
-0.60e+00 |
1.8221e+00 |
5.3301e-09 |
3.2360e-09 |
|
-0.40e+00 |
1.4981e+00 |
2.0799e-09 |
7.8511e-09 |
|
-0.02e+00 |
1.2214e+00 |
1.4442e-08 |
1.0946e-08 |
|
0.00e+00 |
1.000e+00 |
2.1173e-08 |
1.2330e-08 |
|
0.20e+00 |
8.1873e-01 |
2.5802e-08 |
1.1896e-08 |
|
0.40e+00 |
6.7032e-01 |
3.4290e-08 |
9.5981e-09 |
|
0.60e+00 |
5.4881e-01 |
2.7952e-08 |
5.4841e-09 |
|
0.80e+00 |
4.4933e-01 |
4.7688e-08 |
2.5731e-10 |
|
1.00e+00 |
3.6788e-01 |
3.7477e-08 |
7.2157e-09 |
In Table 2, a comparison of the exact and the approximate solution for N=8, N=10 is done.
Figure 3. Comparison of the exact and approximate solutions for Example 2
In Figure 3, we depicted the exact solution and the approximate solution for n=8 of the problem in Example 2 obtained by Hermit collocation method.
Example 3
Consider the LVFIES
$\lambda(\tau)-\int_{-1}^\tau e^{-(\tau+v)} \lambda(v) d v-\int_0^1 2 \cosh \lambda(v) d v=f(\tau)$
If we take:
$\begin{aligned} f(\tau) & =\frac{70368744177664}{325586356356385549} \cosh (\tau)-\frac{70368744177664}{325586356356385549}(\cosh (\tau)(\sin (2)+2)) \\ & +\frac{70368744177664}{325586356356385549} \tau^*\left(e^{(-\tau) / 2}-e^{-1}+e^{\tau / 2}+r\left(e^{-\tau / 2}-e^{\tau / 2}\right)\right)\end{aligned}$
We get:
$\lambda(\tau)=\frac{\cosh \tau}{\sinh 2 \tau+1}$
Table 3. Comparison of errors for Example 3
|
Val. of τ |
Error (N=6) |
Error (N=8) |
Error (N=10) |
|
-1.00e+00 |
9.4467e-08 |
3.7348e-10 |
1.0230e-09 |
|
-0.80e+00 |
6.3854e-08 |
6.4632e-12 |
5.4004e-10 |
|
-0.60e+00 |
8.5473e-08 |
3.3289e-10 |
3.5960e-12 |
|
-0.40e+00 |
6.5937e-08 |
1.9525e-10 |
4.9380e-10 |
|
-0.02e+00 |
4.5408e-08 |
2.0440e-10 |
8.3413e-10 |
|
0.00e+00 |
4.6028e-08 |
1.7791e-10 |
9.6040e-10 |
|
0.20e+00 |
3.6391e-08 |
1.6898e-10 |
8.4951e-10 |
|
0.40e+00 |
5.3720e-08 |
1.2672e-10 |
5.2245e-10 |
|
0.60e+00 |
7.5637e-08 |
2.5954e-10 |
4.1285e-11 |
|
0.80e+00 |
7.8065e-08 |
4.7925e-11 |
4.9974e-11 |
|
1.00e+00 |
3.8624e-08 |
1.1737e-10 |
9.8771e-10 |
Figure 4. The absolute errors for Example 3
The comparison of the error of Example 3 is presented in Table 3, according to different values of N such that 6, 8 and 10. It can be noted that the absolute error decreasing as the value of the integer N increasing.
Results presented in the previous table are shown in the Figure 4, we remark that error decreases when N increases.
Example 4
Consider the LVFIES:
$\lambda(\tau)-\int_{-1}^\tau \cos (\tau-v) \lambda(v) d v-\int_{-1}^1 \sin (\tau-v) \lambda(v) d v=f(\tau)$
If we take:
$f(\tau)=e^{\tau / 2}+e^{-1}(\cos (\tau+1)-\sin (\tau+1))$$+e^{-1}(\cos (\tau+1)+\sin (\tau+1))$$-e^1(\cos (\tau-1)+\sin (\tau-1)) / 2$
We get:
$\lambda(\tau)=e^\tau$
Table 4 presents the comparison of the error of Example 4 for N=8 and N=10.
In Figure 5, we depicted the exact solution and the approximate solution for n=6 of the problem in Example 4 obtained by Hermit collocation method.
Table 4. Comparison of the errors for Example 4
|
Val. of t |
Ex. Sol |
Error (N=8) |
Error N=10 |
|
-1.00e+00 |
3.6788e-01 |
7.4912e-09 |
2.2612e-09 |
|
-0.80e+00 |
4.4933e-01 |
7.6597e-09 |
1.0637e-09 |
|
-0.60e+00 |
5.4881e-01 |
9.7107e-09 |
2.0521e-10 |
|
-0.40e+00 |
6.7032e-01 |
2.4644e-09 |
1.3040e-09 |
|
-0.02e+00 |
8.1873e-01 |
1.4784e-10 |
2.0384e-09 |
|
0.00e+00 |
1.0000e+00 |
3.7148e-09 |
2.2841e-09 |
|
0.20e+00 |
1.2214e+00 |
7.4832e-09 |
2.0025e-09 |
|
0.40e+00 |
1.4918+00 |
5.2958e-09 |
1.2455e-09 |
|
0.60e+00 |
1.8221e+00 |
1.9362e-08 |
1.4861e-10 |
|
0.80e+00 |
2.2255e+00 |
1.0192e-11 |
1.0859e-09 |
|
1.00e+00 |
2.1783e+00 |
1.8840e-08 |
2.2178e-09 |
Figure 5. The absolute errors for Example 4
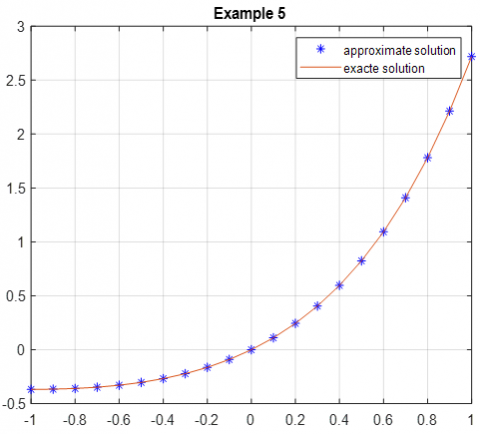
Example 5
Consider the LVFIES
$\lambda(\tau)-\int_{-1}^\tau(\tau-v) \lambda(v) d v-\int_{-1}^1 \tau \lambda(v) d v=f(\tau)$
If we take:
$f(\tau)=2 e^\tau-5 e^{-1}+e^{-1}-4 \tau e^{-1}\left(e^2-1\right)$
We get:
$\lambda(\tau)=\tau e^\tau$
Table 5. Results for Example 5
|
Val. of τ |
Ex. Sol |
Sol Appro. N=10 |
Error N=10 |
|
-1.00e+00 |
-3.6788e-01 |
-3.6788e-01 |
1.1805 -09 |
|
-0.80e+00 |
-3.5946e-01 |
-3.5946e-01 |
5.6785e-10 |
|
-0.60e+00 |
-3.9229e-01 |
-3.9229e-01 |
6.7250e-11 |
|
-0.40e+00 |
-2.6813e-01 |
-2.6813e-01 |
6.2277e-10 |
|
-0.02e+00 |
-1.6375e-01 |
-1.6375e-01 |
1.0300e-09 |
|
0.00e+00 |
0.0000e+00 |
-1.2419e-09 |
1.2419e-09 |
|
0.20e+00 |
2.4428e-01 |
2.4428e-01 |
1.2438e-09 |
|
0.40e+00 |
5.9673-01 |
5.9673e-01 |
1.0556e-09 |
|
0.60e+00 |
1.0933e+00 |
1.0933e+00 |
7.2827e-10 |
|
0.80e+00 |
1.7804e+00 |
1.7804e+00 |
3.4034e-10 |
|
1.00e+00 |
2.1783e+00 |
2.7183e+00 |
3.9580e-11 |
The comparison of the exact and the approximate solutions for N=10. The results for Example 5 are presented in Table 5.
Example 6
Consider the LVFIES
$\lambda(\tau)-\int_0^\tau v \lambda(v) d v-\int_{-1}^1 v \lambda(v) d v=f(\tau)$
If we take:
$f(\tau)=3 \tau+4 \tau^2-\tau^3+\tau^4-2$
We get:
$f(\tau)=3 \tau+4 \tau^2$
The comparison of the exact and approximate solutions for N=3 for Example 5 is presented in Figure 6.
Figures 7 and 8 present respectively the absolute errors for Example 6 and the absolute errors for Example 7. The results for Example 5 are presented in Table 6.
Figure 6. The exact and approximate solutions for Example 5
Figure 7. The absolute errors for Example 6
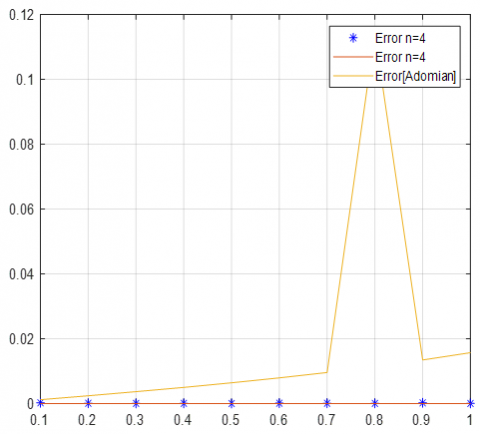
Figure 8. The absolute errors for Example 7
Table 6. Results for Example 6
|
Val. of τ |
Ex. Sol |
Error N=3 |
Error [8] (Adomian) |
|
0.10e-01 |
3.4000e-01 |
7.3275e-15 |
2.0000e-07 |
|
0.20e-01 |
7.6000e-01 |
7.6605e-15 |
2.0000e-07 |
|
0.30e-01 |
1.2600e-01 |
7.9936e-15 |
4.0000e-07 |
|
0.40e-01 |
1.8400e-01 |
7.99360e-15 |
6.0000e-07 |
|
0.50e-01 |
2.5000e+00 |
8.8818e-15 |
1.2000e-06 |
|
0.60e-01 |
3.2400e-01 |
1.0658e-14 |
2.4000e-06 |
|
0.70e-01 |
4.0600-01 |
9.7700e-15 |
5.2000e-06 |
|
0.80e-01 |
4.9600e+00 |
1.1546e-14 |
1.1700e-05 |
|
0.90e-01 |
5.9400e+00 |
1.2434e-14 |
2.6900e-05 |
|
1.00e+00 |
7.0000e+00 |
1.4211e-14 |
6.2500e-05 |
Example 7
Consider the LVFIES
$\lambda(\tau)-\int_0^\tau(\tau-v) \lambda(v) d v-\int_0^1 \tau \lambda(v) d v=f(\tau)$
If we take:
$f(\tau)=-2-2 \tau+e^\tau$
We get:
$\lambda(\tau)=\tau e^\tau$
The comparison of the exact and the approximate solutions for N=4 and N=8. Tables 7 and 8 present respectively the results for Example 7 and a comparison of errors for Example 7 with Adomian. Figure 8 presents the absolute errors for all errors of the same example.
Table 7. Results for Example 7
|
Val. of τ |
Ex. Sol |
App. Sol N=4 |
App. Sol N=8 |
|
00e+00 |
0 |
5.7732e-15 |
-6.3288e-09 |
|
0.10e-01 |
1.1052e-01 |
1.1027e-01 |
1.1052e-01 |
|
0.20e-01 |
2.4428e-01 |
2.4418e-01 |
2.4428e-01 |
|
0.30e-01 |
4.0496e-01 |
4.0501e-01 |
4.0496e-01 |
|
0.40e-01 |
5.9673e-01 |
5.9681e-01 |
5.9673e-01 |
|
0.50e-01 |
8.2436e-01 |
8.2434e-01 |
8.2436e-01 |
|
0.60e-01 |
1.0933e+00 |
1.0931e+00 |
1.0933e+00 |
|
0.70e-01 |
1.4096e+00 |
1.4095e+00 |
1.4096e+00 |
|
0.80e-01 |
1.7804e+00 |
1.7805e+00 |
1.7804e+00 |
|
0.90e-01 |
2.2136e+00 |
2.2139e+00 |
2.2136e+00 |
|
1.00e+00 |
2.7183e+00 |
2.7182e+00 |
2.7183e+00 |
Table 8. Comparison of errors for Example 7 with Adomian
|
Val. of τ |
Error N=4 |
Error N=8 |
Error [8] [Adomian] |
|
0.10e-01 |
2.5191e-04 |
5.1900e-09 |
1.1984e-03 |
|
0.20e-01 |
1.0304e-04 |
2.8525e-09 |
2.4176e-03 |
|
0.30e-01 |
5.6762e-05 |
1.3126e-09 |
3.6788e-03 |
|
0.40e-01 |
7.6581e-05 |
7.4250e-10 |
5.0039e-03 |
|
0.50e-01 |
2.3198e-05 |
2.6313e-09 |
6.4158e-03 |
|
0.60e-01 |
1.2701e-04 |
4.4717e-09 |
7.9393e-03 |
|
0.70e-01 |
1.0983e-04 |
6.3900e-09 |
9.6006e-03 |
|
0.80e-01 |
6.6356e-05 |
7.6748e-09 |
1.1429e-02 |
|
0.90e-01 |
2.4402e-04 |
9.7343e-09 |
1.3455e-02 |
|
1.00e+00 |
5.1972e-05 |
1.0413e-08 |
1.5716e-02 |
Convergence analysis
Hermite polynomials, owing to their orthogonality and recurrence relations, exhibit strong convergence properties when applied to functions that can be well-represented.
Error bounds
Error bounds provide a quantitative measure of how close the numerical solution is to the exact solution. For Hermite polynomials, the error bound is influenced by the smoothness of the target function and its behavior at the boundaries. This error bound illustrates that as N increases, the error decreases factorially, indicating high accuracy for sufficiently large N.
Stability
Stability is a critical aspect in numerical methods to ensure that errors do not amplify through computations. Hermite polynomials benefit from their orthogonality, which inherently contributes to numerical stability. This property ensures that the polynomial terms do not interact destructively, maintaining the integrity of the approximation over a wide range of values.
Moreover, the stability of Hermite polynomial-based methods is reinforced by their recurrence relations, which allow for the efficient and stable computation of higher-order terms. These relations mitigate the risk of numerical instability that might arise from direct computation methods, making Hermite polynomials a robust choice for high-precision applications.
In this study, we approximate the solution of linear Fredholm-Volterra integral equations using the Hermite collocation method. Different examples are mentioned in order to show the efficiency of the Hermite collocation method.
Obtained results are presented through tables and figures that illustrate both the exact and numerical solutions. By comparing these solutions, we demonstrate that the numerical solution closely matches the exact solution, confirming the efficiency of the presented method.
Future research could focus on enhancing the accuracy and computational efficiency of the Hermite combination method by incorporating adaptive algorithms or higher-order interpolation techniques.
A comparative study with other numerical methods for solving Fredholm-Volterra integral equations, such as Galerkin methods, or spline-based approaches, could provide deeper insights into the relative strengths and weaknesses of the Hermite combination method.
Exploring the applicability of the Hermite combination method to other types of integral equations, such as non-linear Fredholm or Volterra integral equations, may reveal new potential uses and limitations.
Incorporating parallel computing techniques into the Hermite combination method could significantly reduce computation time, making it more feasible for large-scale problems.
[1] Wazwaz, A.M. (2010). The variational iteration method for solving linear and nonlinear Volterra integral and integro-differential equations. International Journal of Computer Mathematics, 87(5): 1131-1141. https://doi.org/10.1007/978-3-642-21449-3
[2] Semenova, M., Vasilyeva, A., Lukina, G., Popova, U., Zagolilo, S., Yakushev, I.Y. (2021). Mathematical modeling of differential equations as applied to problems of physics and electrical engineering. In 3rd International Conference on Control Systems, Mathematical Modeling, Automation and Energy Efficiency (SUMMA), Lipetsk, Russian Federation, pp. 161-166. https://doi.org/10.1109/SUMMA53307.2021.9632116
[3] Sun, H., Lu, Y. (2024). Numerical solutions to one dimensional linear Volterra–Fredholm integral equations based on LS-SVM model. Journal of Computational and Applied Mathematics, 451: 116013. https://doi.org/10.1016/j.cam.2024.116013
[4] Caliò, F., Garralda-Guillem, A.I., Marchetti, E., Galán, M.R. (2013). Numerical approaches for systems of Volterra–Fredholm integral equations. Applied Mathematics and Computation, 225: 811-821. https://doi.org/10.1016/j.amc.2013.10.006
[5] Micula, S. (2021). Numerical solution of two-dimensional Fredholm–Volterra integral equations of the second kind. Symmetry, 13(8): 1326. https://doi.org/10.3390/sym13081326
[6] Hama Rashid, H., Srivastava, H.M., Hama, M., Mohammed, P.O., Al-Sarairah, E., Almusawa, M.Y. (2023). New numerical results on existence of Volterra–Fredholm integral equation of nonlinear boundary integro-differential type. Symmetry, 15(6): 1144. https://doi.org/10.3390/sym15061144
[7] Roohollahi, A., Ghazanfari, B., Akhavan, S. (2020). Numerical solution of the mixed Volterra–Fredholm integro-differential multi-term equations of fractional order. Journal of Computational and Applied Mathematics, 376: 112828. https://doi.org/10.1016/j.cam.2020.112828
[8] Malaikah, H.M. (2020). The Adomian decomposition method for solving Volterra-Fredholm integral equation using Maple. Applied Mathematics, 11: 779-787. https://doi.org/10.4236/am.2020.118049
[9] Maturi, D.A., Malaikah, H.M. (2021). The Adomian decomposition method for solving nonlinear partial differential equation using maple. Advances in Pure Mathematics, 11(6): 595-603. https://doi.org/10.4236/am.2020.118052
[10] Nadir, M.N., Jawahdou, A. (2024). Chebyshev polynomials to Volterra-Fredholm integral equations of the first kind. REMAT: Revista Eletrônica da Matemática, 10(1): e3002-e3002. https://doi.org/10.35819/remat2024v10i1id6699
[11] Wang, Z., Hu, X., Hu, B. (2023). A collocation method based on roots of Chebyshev polynomial for solving Volterra integral equations of the second kind. Applied Mathematics Letters, 146: 108804. https://doi.org/10.1016/j.aml.2023.108804
[12] Maleknejad, K., Sohrabi S., Rostami, Y. (2007). Numerical solution of nonlinear Volterra integral equations of second kind by using Chebyshev polynomials. Applied Mathematics and Computation, 188: 123-128. https://doi.org/10.1016/j.amc.2006.09.099
[13] Mirzaee, F., Bimesl, S. (2015). Numerical solutions of systems of high-order Fredholm integro-differential equations using Euler polynomials. Applied Mathematical Modelling, 39(22): 6767-6779. https://doi.org/10.1016/j.apm.2015.02.022
[14] Modanlı, M., Koksal, M.E. (2022). Laplace transform collocation method for telegraph equations defined by Caputo derivative. Mathematical Modelling and Numerical Simulation with Applications, 2(3): 177-186. https://doi.org/10.53391/mmnsa.2022.014
[15] Burgos, C., Cortés, J.C., Villafuerte, L., Villanueva, R.J. (2022). Solving random fractional second-order linear equations via the mean square Laplace transform: Theory and statistical computing. Applied Mathematics and Computation, 418: 126846. https://doi.org/10.1016/j.amc.2021.126846
[16] Salman, N., Mustfaf, M.M. (2020). Numerical solution of fractional Volterra-Fredholm integro-differential equation using Lagrange polynomials. Baghdad Science Journal, 17(4): 1234-1234. http://doi.org/10.21123/bsj.2020.17.4.1234
[17] Varol, D., Daşcıoğlu, A. (2024). Laguerre collocation approach of Caputo fractional Fredholm-Volterra integro-differential equations. Universal Journal of Mathematics and Applications, 7(1): 38-45. https://doi.org/10.32323/ujma.1390222
[18] Negarchi, N., Nouri, K. (2018). Numerical solution of Volterra–Fredholm integral equations using the collocation method based on a special form of the Müntz–Legendre polynomials. Journal of Computational and Applied Mathematics, 344: 15-24. https://doi.org/10.1016/j.cam.2018.05.035
[19] Nemati, S. (2015). Numerical solution of Volterra-Fredholm integral equations using Legendre collocation method. Journal of Computational and Applied Mathematics, 278: 29-36. https://doi.org/10.1016/j.cam.2014.09.030
[20] Yalçinbaş, S., Aynigül, M., Sezer, M. (2011). A collocation method using Hermite polynomials for approximate solution of pantograph equations. Journal of the Franklin Institute, 348(6): 1128-1139. https://doi.org/10.1016/j.jfranklin.2011.05.003
[21] Fang, C., He, G., Xiang, S. (2019). Hermite-type collocation methods to solve Volterra integral equations with highly oscillatory Bessel kernels. Symmetry, 11(2): 11020168. https://doi.org/10.3390/sym11020168
[22] Ajileye, G., Adiku, L., Auta, J.T., Aduroja, O.O., Oyedepo, T. (2024). Linear and nonlinear Fredholm integro-differential equations: Application of collocation method for solution. Journal of Fractional Calculus and Applications, 15(2): 1-10. https://doi.org/10.21608/jfca.2024.265490.1064
[23] Youssri, Y.H., Hafez, R.M. (2020). Chebyshev collocation treatment of Volterra–Fredholm integral equation with error analysis. Arabian Journal of Mathematics, 9: 471-480. https://doi.org/10.1007/s40065-019-0243-y
[24] Fathy, M., Abbas, W. (2024). Solving linear Volterra-Fredholm Integro-Differential Equations using Chebyshev-Galerkin with error estimation. Journal of Advanced Research in Applied Sciences and Engineering Technology, 40(2): 163-175. https://doi.org/10.37934/araset.40.2.163175
[25] Deniz, E., Nurcan B, Savasaneril, B. (2022). The Lucas polynomial solution of linear Volterra-Fredholm integral equations. Matrix Science Mathematic, 6(1): 21-25. http://doi.org/10.26480/msmk.01.2022.21.25