Rasha H. Ibraheem![]()
© 2024 The author. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
In this paper, we present a new computational methodology using the Residual Power Series Method (RPSM) to create a new model in the fuzzy domain suitable for solving a fourth-order of FBVP using the concept of generalized differentiation, and we present an algorithm for the numerical solutions of fourth-order fuzzy boundary value problems (FBVPs), which include ordinary differential equations, based on concepts from fuzzy set theory. The effectiveness of the suggested technique was tested to verify the accuracy of RPSM, and the series solutions were compared to the exact solution when the plane is equal to one. The results show that the algorithm is highly efficient and straightforward in implementation, compared to the other mentioned schemes, and fulfills the characteristics of fuzzy solution, thus it is a practically optimal solution for the most complex BVP programs in science.
fuzzy sets theory, fourth order fuzzy boundary value problems, Residual Power Series Method
In recent years, the study of fuzzy boundary value problems (FBVPs) has grown rapidly as a new field of mathematics; high level BVPs can be seen in various branches of engineering. Chang and Zadeh [1] initially proposed the idea of FDE. The idea of the derivative H of a function with fuzzy values is introduced by Puri and Ralescu [2]. An exact solution to a first-order fuzzy boundary value problem was found by O'Regan et al. [3], the two-point solution of the FBVP was obtained via generalized differentiation by Κhastan and Nieto [4], there is a lot of literature on BVPs, Recently, boundary value problems for higher-order differential equations have seen an increasing number [5-11], in particular, Palamides and Palamides [12] suggested finding solutions to the four-point boundary value problems of the ordinary differential equations of the fourth order. In this work, the fourth-order fuzzy differential equation is solved using the RPS approach and the proposed fourth-order expansion is tested at four different points. An exponential series approximation solution is used to represent the approximate answer, all of its derivatives converging with the exact solution. The suggested algorithm yields a rapidly converging arithmetic series and that can be computed using symbolic arithmetic. We frequently use serial expansion to denote FDEs. To solve different ordinary and partial differential equations, RPS theory is an analytical method [13], the proposed method is an alternative to obtain analytical solution of Taylor series of FBVP. RPSM has been used by several researchers in a variety of scientific and technological disciplines [14-18]. The RPSM was expanded by Kumar et al. [19] to include partial diffusion equations. Arqub applied RPSM to fuzzy differential equations [20]. The development of a residual power series implementation is the main goal of this paper, which aims to obtain analytical solutions for first-order FBVP of the form [5].
$\begin{gathered}\mathcal{G}^{\prime}(\mathrm{t})=\mathrm{h}(\mathrm{t}, \mathcal{G}(\mathrm{t})) \\ \mathcal{G}(\mathrm{a})=\tilde{\mathcal{G}}^0, \mathcal{G}(\mathrm{b})=\tilde{\mathcal{G}}^1\end{gathered}$ (1)
and fourth -order fuzzy boundary value problem in the following form:
$\mathcal{G}^{(4)}(\mathrm{t})=\mathrm{h}\left(\mathrm{t}, \mathcal{G}(\mathrm{t}), \mathcal{G}^{\prime}(\mathrm{t}), \mathcal{G}^{\prime \prime}(\mathrm{t}), \mathcal{G}^{\prime \prime \prime}(\mathrm{t})\right), \mathrm{t} \in[\mathrm{a}, \mathrm{b}]$
With boundary conditions:
$\begin{aligned} \mathcal{G}(\mathrm{a}) & =\tilde{\mathcal{G}}^0, \mathcal{G}(\mathrm{b})=\tilde{\mathcal{G}}^1 \\ \mathcal{G}^{\prime}(\mathrm{a}) & =\tilde{\mathcal{G}}^2, \mathcal{G}^{\prime}(\mathrm{b})=\tilde{\mathcal{G}}^3\end{aligned}$ (2)
where, $\tilde{\mathcal{G}}^0, \tilde{\mathcal{G}}^1, \tilde{\mathcal{G}}^2$ and $\tilde{\mathcal{G}}^3 \in \mathbb{R}_H$ and h: $I \times \mathbb{R}_{\mathrm{H}} \times \mathbb{R}_{\mathrm{H}} \times \mathbb{R}_{\mathrm{H}} \times \mathbb{R}_{\mathrm{H}} \rightarrow \mathbb{R}_{\mathrm{H}}$ are continuous fuzzy functions. It is important to note that many of the basic definitions, statements, and fuzzy concepts that are not included in this work are widely known. Trigonometric and fuzzy -trapezoidal numbers, fuzzy level sets and fuzzy extension theory have all been defined by Jameel et al. [21] and Anakira et al. [22]. This paper is organized as follows. Section 2 introduces basic concepts of fuzzy derivatives. Section 3 presents the theory of fourth -order FBVP. In Section 4, the fundamental principle of the residual power series approach is presented. In Section 5, we show a numerical example to explain the proposed method.
In this section, we introduce the fourth-order derivative based on choosing the type of derivative at each step using strong generalized calculus, where the sources of basic concepts, properties of the fuzzy derivative and some theories are found by Prakash et al. [23]. Now, we extend the theory discussed by them.
Definition 2.1: Let $\mathcal{G}=I \rightarrow \mathbb{R}_{\mathrm{H}}$ and n, m, l, s = 1, 2. Where $\mathcal{G}$ is (n, m, l, s) – differentiable at $t_0 \in I$. If $\mathrm{D}_{\mathrm{n}}^{(1)} \mathcal{G}$, $\mathrm{D}_{\mathrm{n}, \mathrm{m}}^2 \mathcal{G}$ and $\mathrm{D}_{\mathrm{n}, \mathrm{m}, \mathrm{l}}^3 \mathcal{G}$ exists on a neighborhood of $\mathrm{t}_0$ as a fuzzy function and its (s) - differentiable at $\mathrm{t}_0$. The fourth derivatives of $\mathcal{G}$ are denoted by $\mathrm{D}_{\mathrm{n}, \mathrm{m}, \mathrm{l}, \mathrm{s}}^4 \mathcal{G}\left(\mathrm{t}_0\right)$.
Theorem 2.2: Let $\mathcal{G}: I \rightarrow \mathrm{R}_{\mathrm{H}}, \mathrm{D}_{\mathrm{n}}^1 \mathcal{G}: I \rightarrow \mathrm{R}_{\mathrm{H}}, \mathrm{D}_{\mathrm{n}, \mathrm{m}}^2 \mathcal{G}: I \rightarrow \mathrm{R}_{\mathrm{H}}$ and $\mathrm{D}_{\mathrm{n}, \mathrm{m}, \mathrm{l}}^3 \mathcal{G}: I \rightarrow \mathrm{R}_{\mathrm{H}}$ for n, m, l=1,2 and let $\mathcal{G}(\mathrm{t})=\left[\underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(t)\right]$.
(1) If $\mathrm{D}_{1,1,1}^3 \mathcal{G}$ is (1) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{1,1,1,1}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(2) If $\mathrm{D}_{1,1,1}^3 \mathcal{G}$ is (2) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{1,1,1,2}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(3) If $\mathrm{D}_{1,1,2}^3 \mathcal{G}$ is (1) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{1,1,2,1}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(4) If $\mathrm{D}_{1,1,2}^3 \mathcal{G}$ is (2) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{1,1,2,2}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(5) If $\mathrm{D}_{1,2,1}^3 \mathcal{G}$ is (1) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{1,2,1,1}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(6) If $\mathrm{D}_{1,2,1}^3 \mathcal{G}$ is (2) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{1,2,1,2}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(7) If $\mathrm{D}_{1,2,2}^3 \mathcal{G}$ is (1) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{1,2,2,1}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(8) If $\mathrm{D}_{1,2,2}^3 \mathcal{G}$ is (2) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{1,2,2,2}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(9) If $\mathrm{D}_{2,1,1}^3 \mathcal{G}$ is (1) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{2,1,1,1}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(10) If $\mathrm{D}_{2,1,1}^3 \mathcal{G}$ is (2) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{2,1,1,2}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(11) If $\mathrm{D}_{2,1,2}^3 \mathcal{G}$ is (1) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{2,1,2,1}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(12) If $\mathrm{D}_{2,1,2}^3 \mathcal{G}$ is (2) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{2,1,2,2}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(13) If $\mathrm{D}_{2,2,1}^3 \mathcal{G}$ is (1) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{2,2,1,1}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(14) If $\mathrm{D}_{2,2,1}^3 \mathcal{G}$ is (2) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{2,2,1,2}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(15) If $\mathrm{D}_{2,2,2}^3 \mathcal{G}$ is (1) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{2,2,2,1}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
(16) If $\mathrm{D}_{2,2,2}^3 \mathcal{G}$ is (2) - differentiable, consequently $\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha, \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha$ are differentiable and $\left[\mathrm{D}_{2,2,2,2}^4 \mathcal{G}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})\right]$
In this section, we study the theory of substantially generalized derivatives-based fuzzy fourth-order boundary value problems. Additionally, we offer an algorithm to address these issues that includes eight fuzzy DE situations (2), where the selection of the derivation type in the fuzzy setting determines the fuzzy solution of DE (1), according to Nguyen's theory [24], we have the following:
$\left[\mathrm{h}(\mathrm{t}, \mathcal{G}(\mathrm{t})]^\alpha=\mathrm{h}\left(\mathrm{t},[\mathcal{G}(\mathrm{t})]^\alpha\right)=\left[\underline{\mathrm{h}}_\alpha(\mathrm{t}, \mathcal{G}(\mathrm{t})), \overline{\mathrm{h}}_\alpha(\mathrm{t}, \mathcal{G}(\mathrm{t}))\right]\right.$
where, $\underline{\mathrm{h}}_\alpha$ and $\overline{\mathrm{h}}_\alpha$ are defined as follows:
$\begin{aligned} & \underline{\mathrm{h}}_\alpha(\mathrm{t}, \mathcal{G}(\mathrm{t}))=\min \left\{\mathrm{h}\left(\mathrm{t},[\mathcal{G}(\mathrm{t})]^\alpha\right\}=\mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right)\right. \\ & \overline{\mathrm{h}}_\alpha(\mathrm{t}, \mathcal{G}(\mathrm{t}))=\max \left\{\mathrm{h}\left(\mathrm{t},[\mathcal{G}(\mathrm{t})]^\alpha\right\}=\mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) .\right.\end{aligned}$
The next algorithm's goal is to carry out a method for solving fuzzy DE (1) in parametric form with regard to the representation of $\alpha$ –levels:
Algorithm 3.1 [22]: In order to determine the solutions to fuzzy DE (1.1), we consider the two cases below:
Case I. If $\mathcal{G}(\mathrm{t})$ is (1)-differentiable, then $\left[\mathcal{G}^{\prime}(\mathrm{t})\right]^\alpha=\left[\underline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}^{\prime}}{ }_\alpha(\mathrm{t})\right]$ and resolving fuzzy DE (1) results in the following two branches:
(i) ODEs solution for $\underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})$:
$\begin{aligned} & \underline{\mathcal{G}}^{\prime}(\mathrm{t})=\mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}^{\prime}}{ }_\alpha(\mathrm{t})=\mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right)\end{aligned}$ (3)
With the boundary conditions:
$\begin{aligned} & \underline{\mathcal{G}}_\alpha(\mathrm{a})=\underline{\mathcal{G}}_\alpha^0, \overline{\mathcal{G}}_\alpha(\mathrm{a})=\overline{\mathcal{G}}_{\alpha^{\prime}}^0 \\ & \underline{\mathcal{G}}_\alpha(\mathrm{b})=\underline{\mathcal{G}}_\alpha^1, \overline{\mathcal{G}}_\alpha(\mathrm{b})=\overline{\mathcal{G}}_\alpha^1\end{aligned}$ (4)
(ii) The solution $\left[\underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right]$ and $\left[\underline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}), \overline{\mathcal{G}^{\prime}}{ }_\alpha(\mathrm{t})\right]$ are suitable level sets $\forall \alpha \in[0,1]$.
Case II. IF $\mathcal{G}(\mathrm{t})$ is (2)-differentiable, then $\left[\mathcal{G}^{\prime}(\mathrm{t})\right]^\alpha=\left[\overline{\mathcal{G}^{\prime}}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}_\alpha(\mathrm{t})\right]$ and resolving fuzzy DE (1) results in the following two branches:
(i) ODEs solution for $\underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})$
$\begin{aligned} & \underline{\mathcal{G}}_\alpha^{\prime}(\mathrm{t})=\mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}^{\prime}}{ }_\alpha(\mathrm{t})=\mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right)\end{aligned}$
With the boundary conditions:
$\underline{\mathcal{G}}_\alpha(\mathrm{a})=\underline{\mathcal{G}}_\alpha^0, \overline{\mathcal{G}}_\alpha(\mathrm{a})=\overline{\mathcal{G}}_{\alpha^{\prime}}^0 \underline{\mathcal{G}}_\alpha(\mathrm{b})=\underline{\mathcal{G}}_\alpha^1, \overline{\mathcal{G}}_\alpha(\mathrm{b})=\overline{\mathcal{G}}_\alpha^1$
(ii) The solution $\left[\underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right]$ and $\left[\overline{\mathcal{G}^{\prime}}{ }_\alpha(\mathrm{t}), \underline{\mathcal{G}}_\alpha^{\prime}(\mathrm{t})\right]$ are suitable level sets $\forall \alpha \in[0,1]$.
In order to resolve this fuzzy problem, we then investigate the characteristics of fuzzy BVP solutions (2) with regard to various forms of differentiation.
Definition 3.2: Let $n, m, l, s=1,2$. If $G, D_n^1 G, D_{n, m}^2 G, D_{n, m, l}^3 G$ and $D_{n, m, l, s}^4 G$ exist on $I$ as fuzz number value d functions and $D_{n, m, l, s}^4 G(t)=h\left(t, G(t), D_n^{(1)} G(x), D_{n, m}^2 G(x), D_{n, m, l}^3 G(t)\right)$ for all $t \in I$, then $G$ is said to be a (n, m, l, s) solution for the fuzzy differential Eq. (2) on $I$. To find it, use Theorem 2.2 we analyze the level representation of the fuzzy differential Eq. (2) and we can find its solutions, fuzzy boundary value problems (2) can be converted into the corresponding (n, m, l, s), which is a system of fourth-order ordinary boundary value problems (2). As a result, there are eight potential systems for this kind of fuzzy problem, as follows:
Algorithm 3.3:
Case I.
$\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\underline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_1^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,1}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,1,1}^3 \mathcal{G}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\overline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_1^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,1}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,1,1}^3 \mathcal{G}_\alpha(\mathrm{t})\right)\end{aligned}$
With to the boundary conditions:
$\begin{aligned} & \underline{\mathcal{G}}_\alpha(\mathrm{a})=\underline{\mathcal{G}}_\alpha^0, \overline{\mathcal{G}}_\alpha(\mathrm{a})=\overline{\mathcal{G}}_\alpha^0 ; \underline{\mathcal{G}}_\alpha(\mathrm{b})=\underline{\mathcal{G}}_\alpha^1, \overline{\mathcal{G}}_\alpha(\mathrm{b})=\overline{\mathcal{G}}_\alpha^1 \\ & \underline{\mathcal{G}}_\alpha^{\prime}(\mathrm{a})=\underline{\mathcal{G}}_\alpha^2, \overline{\mathcal{G}^{\prime}}{ }_\alpha(\mathrm{a})=\overline{\mathcal{G}}_\alpha^2 ; \underline{\mathcal{G}}_\alpha^{\prime}(\mathrm{b})=\underline{\mathcal{G}}_\alpha^3, \overline{\mathcal{G}}_\alpha^{\prime}(\mathrm{b})=\overline{\mathcal{G}}_\alpha^3\end{aligned}$ (5)
Case II.
$\begin{aligned} & \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\underline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_1^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,1}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,1,2}^3 \mathcal{G}_\alpha(\mathrm{t})\right) \\ & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\overline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_1^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,1}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,1,2}^3 \mathcal{G}_\alpha(\mathrm{t})\right)\end{aligned}$
With to the boundary conditions as in Eq. (5)
Case III.
$\begin{aligned} & \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\underline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_1^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,2}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,2,1}^3 \mathcal{G}_\alpha(\mathrm{t})\right) \\ & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\overline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_1^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,2}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,2,1}^3 \mathcal{G}_\alpha(\mathrm{t})\right)\end{aligned}$
With to the boundary conditions as in Eq. (5)
Case IV.
$\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\underline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_1^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,2}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,2,2}^3 \mathcal{G}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\overline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_1^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,2}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{1,2,2}^3 \mathcal{G}_\alpha(\mathrm{t})\right)\end{aligned}$
With to the boundary conditions as in Eq. (5)
Case V.
$\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\underline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_2^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,1}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,1,1}^3 \mathcal{G}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\overline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_2^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,1}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,1,1}^3 \mathcal{G}_\alpha(\mathrm{t})\right)\end{aligned}$
With to the boundary conditions as in Eq. (5)
Case VI.
$\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\underline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_2^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,1}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,1,2}^3 \mathcal{G}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\overline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_2^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,1}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,1,2}^3 \mathcal{G}_\alpha(\mathrm{t})\right)\end{aligned}$
With to the boundary conditions as in Eq. (5)
Case VII:
$\begin{aligned} & \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\underline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_2^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,2}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,2,1}^3 \mathcal{G}_\alpha(\mathrm{t})\right) \\ & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\overline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_2^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,2}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,2,1}^3 \mathcal{G}_\alpha(\mathrm{t})\right)\end{aligned}$
With to the boundary conditions as in Eq. (5)
Case VIII:
$\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\underline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_2^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,2}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,2,2}^3 \mathcal{G}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\overline{\mathrm{h}}\left(\mathrm{t}, \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_2^1 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,2}^2 \mathcal{G}_\alpha(\mathrm{t}), \mathrm{D}_{2,2,2}^3 \mathcal{G}_\alpha(\mathrm{t})\right)\end{aligned}$
With to the boundary conditions as in Eq. (5)
In this section, we describe the RPS method for fourth-order BVPs. At first, we analyze the RPS theorem to solve the BVPs for fuzzy DE (1). The solutions of BVP Eqs. (3) and (4) of an expansion of the power series about the boundary point $t=t_0$ are expressed by the RPSM and assumes that the solution has the following form:
$\underline{\mathcal{G}}_\alpha(\mathrm{t})=\sum_{\kappa=0}^{\infty} \underline{\mathcal{G}}_{\alpha, \mathrm{K}}(\mathrm{t})$ and $\overline{\mathcal{G}}_\alpha(\mathrm{t})=\sum_{\kappa=0}^{\infty} \overline{\mathcal{G}}_{\alpha, \mathrm{K}}(\mathrm{t})$
where, $\underline{\mathcal{G}}_{\alpha, \kappa}$ and $\overline{\mathcal{G}}_{\alpha, \kappa}$ are approximate terms and are as follows:
$\begin{aligned} & \underline{\mathcal{G}}_{\alpha, \kappa}(\mathrm{t})=\mathrm{a}_{\mathrm{\kappa}}(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^{\mathrm{K}} ,\\ & \overline{\mathcal{G}}_{\alpha, \mathrm{K}}(\mathrm{t})=\mathrm{b}_{\mathrm{\kappa}}(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^{\mathrm{k}}\end{aligned}$
Since $\underline{\mathcal{G}}_{\alpha, 0}(\mathrm{t})$ and $\overline{\mathcal{G}}_{\alpha, 0}(\mathrm{t})$ which represent the boundary approximations of $\underline{\mathcal{G}}_\alpha(\mathrm{t})$ and $\overline{\mathcal{G}}_\alpha(\mathrm{t})$ have:
$\mathrm{a}_0(\alpha)=\underline{\mathcal{G}}_{\alpha, 0}\left(\mathrm{t}_0\right)=\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \mathrm{b}_0(\alpha)=\overline{\mathcal{G}}_{\alpha, 0}\left(\mathrm{t}_0\right)=\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)$.
If we use the approximations $\underline{\mathcal{G}}_{\alpha, 0}\left(\mathrm{t}_0\right)=\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)$ and $\overline{\mathcal{G}}_{\alpha, 0}\left(\mathrm{t}_0\right)=\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)$ as the boundary of $\underline{\mathcal{G}}_\alpha(\mathrm{t})$ and $\overline{\mathcal{G}}_\alpha(\mathrm{t})$, respectively, then we can approximate the solutions $\underline{\mathcal{G}}_\alpha(\mathrm{t})$ and $\overline{\mathcal{G}}_\alpha(\mathrm{t})$ of Eqs. (3) and (4) by the n-th-truncated series and calculate $\mathcal{G}_{\alpha, \kappa}(\mathrm{t})$ and $\overline{\mathcal{G}}_{\alpha, \kappa}(\mathrm{t})$, for $\kappa=1,2,3,4$.
$\begin{aligned} & \psi_{\underline{\mathcal{G}}_{\alpha, \mathrm{K}}}(\mathrm{t})=\sum_{k=0}^n a_k(\alpha)\left(t-t_0\right)^k \\ & \psi_{\overline{\mathcal{G}}_{\alpha, \mathrm{K}}}(\mathrm{t})=\sum_{\mathrm{k}=0}^{\mathrm{n}} \mathrm{b}_{\mathrm{K}}(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^\kappa \\ & \end{aligned}$ (6)
Now, we define the Residual functions as:
$\begin{aligned} & \operatorname{Res}_{1, \alpha}(\mathrm{t})=\underline{\mathcal{G}}_\alpha^{\prime}(\mathrm{t})+\mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & \operatorname{Res}_{2, \alpha}(\mathrm{t})=\overline{\mathcal{G}^{\prime}}{ }_\alpha(\mathrm{t})+\mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right)\end{aligned}$ (7)
Obvious that $\operatorname{Res}_{1, \alpha}(\mathrm{t})=\operatorname{Res}_{2, \alpha}(\mathrm{t})=0 \forall \mathrm{t} \in \mathrm{I}$ and $\alpha \in[0,1]$, and we extend of $\underline{\mathcal{G}}_\alpha(\mathrm{t})$ and $\overline{\mathcal{G}}_\alpha(\mathrm{t})$ in Eq. (6) to approximate the solution.
$\begin{aligned} & \operatorname{Res}_{1, \alpha}(t)=\sum_{\kappa=1}^{\infty} \kappa a_\kappa(\alpha)\left(t-t_0\right)^{\kappa-1} \\ & +\mathrm{h}_{1, \alpha}\binom{\mathrm{x}, \sum_{\mathrm{k}=0}^{\mathrm{n}} \mathrm{a}_{\mathrm{\kappa}}(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^{\mathrm{k}},}{\sum_{\mathrm{k}=0}^{\mathrm{n}} \mathrm{b}_{\mathrm{K}}(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^\kappa} \\ & \operatorname{Res}_{2, \alpha}(t)=\sum_{\kappa=1}^{\infty} \kappa b_\kappa(\alpha)\left(t-t_0\right)^{\kappa-1} \\ & +\mathrm{h}_{2, \alpha}\binom{\mathrm{x}, \sum_{\mathrm{k}=0}^{\mathrm{n}} \mathrm{a}_{\mathrm{\kappa}}(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^{\mathrm{k}}}{\sum_{\mathrm{k}=0}^{\mathrm{n}} \mathrm{b}_{\mathrm{K}}(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^\kappa} \\ & \end{aligned}$ (8)
We put $t=t_0$ in Eq. (8) to get the first approximate and using $\operatorname{Res}_{1, \alpha}\left(\mathrm{t}_0\right)=\operatorname{Res}_{2, \alpha}\left(\mathrm{t}_0\right)=0$.
$\begin{aligned} & a_1(\alpha)=h_{1, \alpha}\left(t_{0,} a_0(\alpha), b_0(\alpha)\right) \\ & b_1(\alpha)=h_{2, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right)\end{aligned}$ (9)
The first approximation of Eqs. (3) and (4) can be represented as follows using the 1st - truncated series:
$\begin{aligned} & \Psi_{\underline{G}_{\alpha, 1}}(\mathrm{t})=\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & \Psi_{\overline{G}_{\alpha, 1}}(\mathrm{t})=\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\left(\mathrm{t}-\mathrm{t}_0\right)\end{aligned}$
Then using $\operatorname{Res}^{\prime}{ }_{1, \alpha}\left(t_0\right)=\operatorname{Res}^{\prime}{ }_{2, \alpha}\left(t_0\right)$, we differentiate Eq. (8) with regard to t to determine the second approximation and the results are as follows:
$\begin{aligned} & \mathrm{a}_2(\alpha)=\frac{1}{2}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \mathrm{a}_0(\alpha), \mathrm{b}_0(\alpha)\right)\right. \\ & +\mathrm{a}_1(\alpha) \frac{\partial}{\partial \bar{g}_\alpha} \mathrm{h}_{1, \alpha}\left(t_{0,} a_0(\alpha), b_0(\alpha)\right) \\ & \left.+b_1(\alpha) \frac{\partial}{\partial \bar{g}_\alpha} h_{1, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right)\right] \\ & b_2(\alpha)=\frac{1}{2}\left[\frac{\partial}{\partial t} h_{2, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right)\right. \\ & +a_1(\alpha) \frac{\partial}{\partial \bar{g}_\alpha} h_{2, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right) \\ & \left.+b_1(\alpha) \frac{\partial}{\partial \bar{g}_\alpha} h_{2, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right)\right]\end{aligned}$ (10)
The second approximation of Eqs. (3) and (4) can be represented as follows using the 2nd - truncated Series:
$\begin{aligned} & \Psi_{\underline{\mathcal{G}}_{\alpha, 2}}(\mathrm{t}) =\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{h}_{1, \alpha}\left(\mathrm{t}_{0,} \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & +\frac{1}{2}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_{0,} \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right. \\ & +\mathrm{h}_{1, \alpha}\left(\mathrm{t}_{0,} \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_{0, \underline{\mathcal{G}}_\alpha}\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \left.+\mathrm{h}_{2, \alpha}\left(\mathrm{t}_{0,} \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_{0,} \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^2\end{aligned}$
$\begin{aligned} & \Psi_{\underline{\mathcal{G}}_{\alpha, 2}}(\mathrm{t}) =\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{h}_{2, \alpha}\left(\mathrm{t}_{0,} \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & +\frac{1}{2}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right. \\ & +\mathrm{h}_{1, \alpha}\left(\mathrm{t}_{0,}, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_{0,} \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \left.+\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^2\end{aligned}$
Then using $\operatorname{Res}_{1, \alpha}^{\prime}\left(t_0\right)=\operatorname{Res}_{2, \alpha}^{\prime}\left(t_0\right)$, we differentiate Eq. (8) with regard to t to determine the third approximation and the results are as follows:
$\begin{aligned} & a_3(\alpha)=\frac{1}{6}\left[\frac{\partial}{\partial t} h_{1, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right)\right. \\ & +a_2(\alpha) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} h_{1, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right) \\ & \left.+b_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} h_{1, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right)\right] \\ & b_3(\alpha)=\frac{1}{6}\left[\frac{\partial}{\partial t} h_{2, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right)\right. \\ & +a_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} h_{2, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right) \\ & \left.+b_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} h_{2, \alpha}\left(t_0, a_0(\alpha), b_0(\alpha)\right)\right]\end{aligned}$ (11)
The third approximation of Eqs. (3) and (4) can be represented as follows using the 3rd - truncated series:
$\begin{aligned} & \Psi_{\underline{\mathcal{G}}_{\alpha, 3}}(\mathrm{t})=\underline{\mathcal{G}}_\alpha\left(t_0\right)+h_{1, \alpha}\left(t_0, \underline{\mathcal{G}}_\alpha\left(t_0\right), \overline{\mathcal{G}}_\alpha\left(t_0\right)\right)\left(t-t_0\right) \\ & +\frac{1}{2}\left[\frac{\partial}{\partial t} h_{1, \alpha}\left(t_{0,} \underline{\mathcal{G}}_\alpha\left(t_0\right), \overline{\mathcal{G}}_\alpha\left(t_0\right)\right)+\right. \\ & h_{1, \alpha}\left(t_{0,} \underline{\mathcal{G}}_\alpha\left(t_0\right), \overline{\mathcal{G}}_\alpha\left(t_0\right)\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} h_{1, \alpha}\left(t_{0,} \underline{\mathcal{G}}_\alpha\left(t_0\right), \overline{\mathcal{G}}_\alpha\left(t_0\right)\right)+ \\ & \left.h_{2, \alpha}\left(t_{0,} \underline{\mathcal{G}}_\alpha\left(t_0\right), \overline{\mathcal{G}}_\alpha\left(t_0\right)\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} h_{1, \alpha}\left(t_{0,} \underline{\mathcal{G}}_\alpha\left(t_0\right), \overline{\mathcal{G}}_\alpha\left(t_0\right)\right)\right]\left(t-t_0\right)^2+ \\ & \frac{1}{6}\left[\frac{\partial}{\partial t} h_{1, \alpha}\left(t_0, \underline{\mathcal{G}}_\alpha\left(t_0\right), \overline{\mathcal{G}}_\alpha\left(t_0\right)\right)\right. \\ & +a_2(\alpha) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} h_{1, \alpha}\left(t_0, \underline{\mathcal{G}}_\alpha\left(t_0\right), \overline{\mathcal{G}}_\alpha\left(t_0\right)\right) \\ & \left.+\mathrm{b}_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^3 \\ & \end{aligned}$
$\begin{aligned} & \Psi_{\overline{\mathcal{G}}_{\alpha, 3}}(\mathrm{t})=\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & +\frac{1}{2}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2 \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+\right. \\ & \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+ \\ & \left.\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^2 \\ & +\frac{1}{6}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right. \\ & +\mathrm{a}_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \left.+\mathrm{b}_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^3 \\ & \end{aligned}$
Then using $\operatorname{Res}_{1, \alpha}^{\prime}\left(t_0\right)=\operatorname{Res}_{2, \alpha}^{\prime}\left(t_0\right)$, we differentiate Eq. (8) with regard to t to determine the fourth approximation and the results are as follows:
$\begin{array}{r}\mathrm{a}_4(\alpha)=\frac{1}{12}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \mathrm{a}_0(\alpha), \mathrm{b}_0(\alpha)\right)+\right. \\ \mathrm{a}_3(\alpha) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \mathrm{a}_0(\alpha), \mathrm{b}_0(\alpha)\right)+ \\ \left.\mathrm{b}_3(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \mathrm{a}_0(\alpha), \mathrm{b}_0(\alpha)\right)\right] \\ \mathrm{b}_4(\alpha)=\frac{1}{12}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \mathrm{a}_0(\alpha), \mathrm{b}_0(\alpha)\right)\right. \\ +\mathrm{a}_3(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \mathrm{a}_0(\alpha), \mathrm{b}_0(\alpha)\right) \\ \left.+\mathrm{b}_3(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \mathrm{a}_0(\alpha), \mathrm{b}_0(\alpha)\right)\right]\end{array}$ (12)
The fourth approximation of Eqs. (3) and (4) can be represented as follows using the 4th - truncated series:
$\begin{aligned} & \Psi_{\underline{\mathcal{G}}_{\alpha, 4}}(\mathrm{t})=\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{h}_{1, \alpha}\left(\mathrm{t}_{0, \underline{\mathcal{G}}_\alpha}\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & +\frac{1}{2}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+\right. \\ & \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \underline{\mathcal{G}_\alpha}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+ \\ & \left.\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}_\alpha}\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right] \\ & \left(\mathrm{t}-\mathrm{t}_0\right)^2+\frac{1}{6}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right. \\ & +\mathrm{a}_2(\alpha) \frac{\partial}{\partial \underline{\mathcal{G}_\alpha}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \left.+\mathrm{b}_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^3 \\ & +\frac{1}{12}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}_\alpha}\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right. \\ & +\mathrm{a}_3(\alpha) \frac{\partial}{\partial \underline{\mathcal{G}_\alpha}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \left.+\mathrm{b}_3(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^4 \\ & \end{aligned}$
$\begin{aligned} & \Psi_{\overline{\mathcal{G}}_{\alpha, 4}}(\mathrm{t})=\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & +\frac{1}{2}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}_\alpha}\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+\right. \\ & \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \underline{\mathcal{G}_\alpha}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+ \\ & \left.\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}_\alpha}\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right] \\ & \left(\mathrm{t}-\mathrm{t}_0\right)^2+\frac{1}{6}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+\right. \\ & \mathrm{a}_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_{0,} \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \left.+\mathrm{b}_2(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^3 \\ & +\frac{1}{12}\left[\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right. \\ & +\mathrm{a}_3(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \left.+\mathrm{b}_3(\alpha) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\right]\left(\mathrm{t}-\mathrm{t}_0\right)^4 \\ & \end{aligned}$
to find the approximate solution to BVP Eqs. (3) and (4), we substitute the n-th - truncated series $\Psi_{\underline{\mathcal{G}}_{\alpha, \mathrm{k}}}(\mathrm{t})$ and $\Psi_{\overline{\mathcal{G}}_{\alpha, \mathrm{k}}}(\mathrm{t})$ into the Residual Eq. (8) instead of the of expansion $\underline{\mathcal{G}}_\alpha(\mathrm{t})$ and $\overline{\mathcal{G}}_\alpha$ respectively, to obtain $\quad \underline{\mathcal{G}}_\alpha{ }^{(\mathrm{s})}\left(\mathrm{t}_0\right)=\Psi_{\underline{\mathcal{G}}_{\alpha, \mathrm{k}}}{ }^{(\mathrm{s})}\left(\mathrm{t}_0\right) \quad$ and $\quad \overline{\mathcal{G}}_\alpha{ }^{(\mathrm{s})}\left(\mathrm{t}_0\right)=$ $\Psi_{\bar{\mathcal{G}}_{\alpha, \mathrm{k}}}{ }^{(\mathrm{s})}\left(\mathrm{t}_0\right), \mathrm{s} \leq \mathrm{n}$.
The following theorem is an extension of the theorem [14] that illustrates the RPS method's convergence.
Theorem 4.1: Assume that $\underline{\mathcal{G}}_\alpha(\mathrm{t})$ and $\overline{\mathcal{G}}_\alpha(\mathrm{t})$ are the exact solutions of the Eqs. (3) and (4) in the sense of (1)differentiable. Then, the Taylor expansion of $\underline{\mathcal{G}}_\alpha(\mathrm{t})$ and $\overline{\mathcal{G}}_\alpha(\mathrm{t})$ is the approximate solution that the RPSM yields.
Proof: Assume that Eqs. (3) and (4) have the following approximate solutions:
$\begin{aligned} \underline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})= & \mathrm{a}_0(\alpha)+\mathrm{a}_1(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)+\mathrm{a}_2(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & +\mathrm{a}_3(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^3+\mathrm{a}_4(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^4 \\ \overline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})= & \mathrm{b}_0(\alpha)+\mathrm{b}_1(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)+\mathrm{b}_2(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^2 \\ + & \mathrm{b}_3(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^3+\mathrm{b}_4(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^4\end{aligned}$ (13)
the coefficients $a_κ$ and $b_κ$ in Eq. (13) are display as follows:
$\mathrm{a}_\kappa(\alpha)=\frac{1}{\kappa!} \underline{\mathcal{G}}_\alpha{ }^{(\kappa)}\left(\mathrm{t}_0\right), \mathrm{b}_\kappa(\alpha)=\frac{1}{\kappa!} \overline{\mathcal{G}}_\alpha{ }^{(\kappa)}\left(\mathrm{t}_0\right)$ (14)
where, $\underline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})$ and $\overline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})$ are the exact solutions of Eqs. (3) and (4), $\forall \kappa=0,1,2,3,4, \alpha \in[0,1]$, It's clear that for $\kappa=0$ the boundary conditions (4) yield $\mathrm{a}_0(\alpha)=\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)$ and $\mathrm{b}_0(\alpha)=$ $\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)$ and where $\mathrm{\kappa}=1$, we obtain $\mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)=$ $\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right)$, and $\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)=\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right)$. And, from Eq. (3), we can get:
$\begin{aligned} \underline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})= & \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{a}_1(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)+\mathrm{a}_2(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^2 \\ & +\mathrm{a}_3(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^3+\mathrm{a}_4(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^4 \\ \overline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})= & \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\mathrm{b}_1(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)+\mathrm{b}_2(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^2 \\ & +\mathrm{b}_3(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^3+\mathrm{b}_4(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^4\end{aligned}$ (15)
We set $\mathrm{t}=\mathrm{t}_0$ and by substitution Eq. (15) in Eq. (3) we can obtain:
$\begin{aligned} & \mathrm{a}_1(\alpha)=\mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)=\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right), \\ & \mathrm{b}_1(\alpha)=\mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)=\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right)\end{aligned}$ (16)
Furthermore, the differential of Eq. (3) with regard to t can be obtained for κ=2:
$\begin{gathered}\underline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t})=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ +\underline{\mathcal{G}}^{\prime}(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ +\overline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ \overline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t})=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ +\underline{\mathcal{G}}_\alpha^{\prime}(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ 2 \mathrm{~b}_2(\alpha)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ +\underline{\mathcal{G}}_\alpha^{\prime}\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ +\overline{\mathcal{G}}_\alpha^{\prime}\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\end{gathered}$ (17)
Substitute $t=t_0$ into the Eq. (17), we can obtain:
$\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \overline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\bar{\partial}}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \end{aligned}$ (18)
We can construct the approximation system of Eqs. (3) and (4) according to Eqs. (15) and (16) as follows:
$\begin{aligned} \underline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t}) & =\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & +a_2(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^2+\cdots \\ \overline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t}) & =\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ & +\mathrm{b}_2(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^2+\cdots\end{aligned}$ (19)
by substitution Eq. (18) in Eq. (17) and put $t=t_0$ we get $2 \mathrm{a}_2(\alpha)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)$.
When we compare Eqs. (18) and (22) we obtain:
$\begin{aligned} & \mathrm{a}_2(\alpha)=\frac{1}{2} \underline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \\ & \mathrm{b}_2(\alpha)=\frac{1}{2} \overline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)\end{aligned}$ (20)
Similarly, the differential of Eq. (3) with regard to t can be obtained for κ =3:
$\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha(\mathrm{t})=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t}) \frac{\underline{\partial}}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t})=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \mathcal{G}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right)+ \\ & \underline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime \prime}{ }_\alpha{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right)\end{aligned}$ (21)
We can construct the approximation system of Eqs. (3) and (4) according to Eqs. (15), (16) and (20) as follows:
$\begin{gathered}\underline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})=\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+ \\ \underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right)+\frac{1}{2} \underline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right)^2 \\ +\mathrm{a}_3(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^3+\cdots\end{gathered}$ (22)
$\begin{gathered}\overline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})=\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\overline{\mathcal{G}}_\alpha^{\prime}\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ +\frac{1}{2} \overline{\mathcal{G}}^{\prime \prime}{ }_\alpha^{\prime}\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right)^2+\mathrm{b}_3(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^3+ \\ \cdots \underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ +\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ 2 \mathrm{~b}_2(\alpha)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+ \\ +\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ \quad+\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\end{gathered}$ (23)
by substitution Eq. (22) in Eq. (21) and put $\mathrm{t}=\mathrm{t}_0$ we get:
$\begin{aligned} & 6 \mathrm{a}_3(\alpha)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \mathcal{G}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & 6 \mathrm{~b}_3(\alpha)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}_\alpha}\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)\end{aligned}$ (24)
When we compare Eqs. (24) and (21) and set $\mathrm{t}=\mathrm{t}_0$, we obtain:
$\begin{aligned} & \mathrm{a}_3(\alpha)=\frac{1}{6} \mathcal{G}^{\prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \\ & \mathrm{b}_3(\alpha)=\frac{1}{6} \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) .\end{aligned}$ (25)
Similarly, the differential of Eq. (3) with regard to t can be obtained for κ=4:
$\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha(\mathrm{t})=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }^\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}_\alpha}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha(\mathrm{t})=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right) \\ & +\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha(\mathrm{t}) \frac{\partial}{\partial \mathcal{G}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}, \underline{\mathcal{G}}_\alpha(\mathrm{t}), \overline{\mathcal{G}}_\alpha(\mathrm{t})\right)\end{aligned}$ (26)
We can construct the approximation system of Eqs. (3) and (4) according to Eqs. (15), (16) and (25) as follows:
$\begin{gathered}\underline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})=\underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ +\frac{1}{2} \underline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right)^2+\frac{1}{6} \underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right)^3 \\ \quad+\mathrm{a}_4(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^4 \\ \overline{\tilde{\mathcal{G}}}_\alpha(\mathrm{t})=\overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)+\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right) \\ +\frac{1}{2} \overline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)\left(\mathrm{t}-\mathrm{t}_0\right)^2+\frac{1}{6} \overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \cdot\left(\mathrm{t}-\mathrm{t}_0\right)^3 \\ +\mathrm{b}_4(\alpha)\left(\mathrm{t}-\mathrm{t}_0\right)^4\end{gathered}$ (27)
Substitution Eq. (26) into Eq. (27) and setting $\mathrm{t}=\mathrm{t}_0$, we obtain:
$\begin{aligned} & 12 \mathrm{a}_4(\alpha)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right)+ \\ & \underline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{1, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & 12 \mathrm{~b}_4(\alpha)=\frac{\partial}{\partial \mathrm{t}} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\underline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \underline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & +\overline{\mathcal{G}}^{\prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right) \frac{\partial}{\partial \overline{\mathcal{G}}_\alpha} \mathrm{h}_{2, \alpha}\left(\mathrm{t}_0, \underline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right), \overline{\mathcal{G}}_\alpha\left(\mathrm{t}_0\right)\right) \\ & \end{aligned}$ (28)
By setting $\mathrm{t}=\mathrm{t}_0$ and comparing Eqs. (26) and (28), we can conclude that $\mathrm{a}_4(\alpha)=\frac{1}{12} \underline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)$ and $\mathrm{b}_4(\alpha)=$ $\frac{1}{12} \overline{\mathcal{G}}^{\prime \prime \prime \prime}{ }_\alpha\left(\mathrm{t}_0\right)$.
Corollary 4.1 [20]: The exact solution will be accessible from the RPSM if either $\underline{\mathcal{G}}_\alpha(\mathrm{t})$ or $\overline{\mathcal{G}}_\alpha(\mathrm{t})$ is a polynomial.
Consider a fourth-order linear FBVP:
$\tilde{\mathcal{G}}^{(4)}(\mathrm{t})-\tilde{\mathcal{G}}(\mathrm{t})=4 \mathrm{e}^{\mathrm{t}}, \mathrm{t} \in[0,1]$ (29)
With fuzzy boundary conditions:
$\begin{gathered}\tilde{\mathcal{G}}(0)=[\alpha, 2-\alpha] \\ \tilde{\mathcal{G}}(1)=[(\alpha+1) \mathrm{e},(3-\alpha) \mathrm{e}] '\\ \forall \alpha \in[0,1] \\ \tilde{\mathcal{G}}^{\prime \prime}(0)=[\alpha+2,4-\alpha] \\ \tilde{\mathcal{G}}^{\prime \prime}(1)=[(\alpha+3) \mathrm{e},(5-\alpha) \mathrm{e}]\end{gathered}$ (30)
The solution of eigenvalue and eigenvector are as follows:
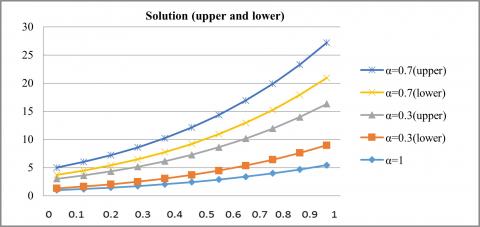
$\mathcal{G}_\alpha(\mathrm{t})=\left(\mathrm{e}^{\mathrm{t}}(\alpha+\mathrm{t}), \mathrm{e}^{\mathrm{t}}(2-\alpha+\mathrm{t})\right)$
Solution of $\mathcal{G}$ together with $\alpha$-levels: $\mathcal{G}_\alpha(\mathrm{t})=[\underline{\mathcal{G}}(\mathrm{t}), \overline{\mathcal{G}}(\mathrm{t})]$, $\alpha \in(0,1]$. Therefore, we suppose that the problem to the following solutions in the lower case $\mathcal{G}$ :
$\underline{\mathcal{G}}^{(4)}(\mathrm{t})-\underline{\mathcal{G}}(\mathrm{t})=4 \mathrm{e}^{\mathrm{t}}$ (31)
with boundary conditions:
$\begin{gathered}\underline{\mathcal{G}}(0)=\alpha, \underline{\mathcal{G}}(1)=(\alpha+1) \mathrm{e} \\ \underline{\mathcal{G}}^{\prime \prime}(0)=\alpha+2, \underline{\mathcal{G}}^{\prime \prime}(1)=(\alpha+3) \mathrm{e}\end{gathered}$ (32)
The solution of the series about $t_0=0$ is obtained.
Let:
$\begin{aligned} \underline{\mathcal{G}}(\mathrm{t}) & =\sum_{\kappa=0}^{\infty} \mathrm{a}_\kappa(\mathrm{t}-0)^\kappa=\sum_{\kappa=0}^{\infty} \mathrm{a}_\kappa \mathrm{t}^\kappa \\ & =\mathrm{a}_0+\mathrm{a}_1 \mathrm{t}+\mathrm{a}_2 \mathrm{t}^2+\mathrm{a}_3 \mathrm{t}^3+\cdots\end{aligned}$ (33)
Now, the first four coefficients are computed under boundary conditions:
$\begin{gathered}\underline{\mathcal{G}}(0)=\alpha=a_0+a_1(0)+a_2(0)^2+a_3(0)^3+\cdots=a_0 \\ \underline{\mathcal{G}}^{\prime \prime}(\mathrm{t})=\sum_{\kappa=2}^{\infty} \kappa(\kappa-1) \mathrm{a}_\kappa \mathrm{t}^{\mathrm{k}-2}=2 \mathrm{a}_2+32 \mathrm{a}_3 \mathrm{t}+\cdots \\ \alpha+2=\underline{\mathcal{G}}^{\prime \prime}(0)=2 \mathrm{a}_2 \rightarrow \mathrm{a}_2=\frac{\alpha+2}{2}\end{gathered}$
Similarly, the third derivative:
$\begin{gathered}\underline{\mathcal{G}}^{\prime \prime \prime}(\mathrm{t})=\sum_{\mathrm{\kappa}=3}^{\infty} \kappa(\kappa-1)(\kappa-2) \mathrm{a}_{\mathrm{\kappa}} \mathrm{t}^{\mathrm{k}-3} \\ =6 \mathrm{a}_3+4(3) 2 \mathrm{a}_4 \mathrm{t}+\cdots \\ \underline{\mathcal{G}}^{\prime \prime \prime}(0)=\underline{\mathcal{G}}(0)+4 \\ 6 \mathrm{a}_3=\alpha+4 \rightarrow \mathrm{a}_3=\frac{\alpha+4}{6}\end{gathered}$
and so $\begin{aligned} & \underline{\mathcal{G}}^{\prime \prime}(1)=2 \mathrm{a}_2+6 \mathrm{a}_3+12 \mathrm{a}_4=(\alpha+3) \mathrm{e} ; \mathrm{a}_4=\frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12}, \\ & \underline{\mathcal{G}}(1)=\mathrm{a}_0+\mathrm{a}_1+\mathrm{a}_2+\mathrm{a}_3+\mathrm{a}_4=(\alpha+1) \mathrm{e}:\end{aligned}$
$a_1=\left(\frac{11}{12} \alpha+\frac{3}{4}\right) e-\frac{3}{2} \alpha-\frac{7}{6}=\frac{(11 \alpha+9) e-18 \alpha-14}{12}$
Thus, we use Eq. (33) to solve for Eq. (31), we get
$\sum_{\kappa=3}^{\infty} \kappa(\kappa-1)(\kappa-2) a_\kappa t^{\kappa-3}-\sum_{\kappa=0}^{\infty} a_\kappa t^\kappa=4 e^t$
Standard form of the first power series as:
$\begin{gathered}\sum_{k=0}^{\infty}(\kappa+3)(\kappa+2)(\kappa+1) a_{\kappa+3} t^\kappa-\sum_{k=0}^{\infty} a_\kappa t^\kappa=4 e^t \\ \sum_{\kappa=0}^{\infty}\left((\kappa+3)(\kappa+2)(\kappa+1) a_{k+3}-a_k\right) t^k=4 e^t\end{gathered}$
This must be removed for each t, so the total coefficient must be removed for each power of $t^K$ separately:
$(\kappa+3)(\kappa+2)(\kappa+1) a_{\kappa+3}-a_\kappa=0 \forall \kappa$
We conclude that $\mathrm{a}_{\kappa+3}=\frac{\mathrm{a}_\kappa}{(\kappa+3)(\kappa+2)(\kappa+1)} \forall \kappa$.
Similarly, suppose that the problem with the upper solution $\overline{\mathcal{G}}$ is as follows:
$\overline{\mathcal{G}}^{(4)}(\mathbf{x})-\overline{\mathcal{G}}(\mathbf{x})=4 \mathrm{e}^{\mathrm{t}}$ (34)
With boundary conditions:
$\begin{gathered}\overline{\mathcal{G}}(0)=2-\alpha, \overline{\mathcal{G}}(1)=(3-\alpha) \mathrm{e} \\ \overline{\mathcal{G}}^{\prime \prime}(0)=4-\alpha, \overline{\mathcal{G}}^{\prime \prime}(1)=(5-\alpha) \mathrm{e}\end{gathered}$ (35)
the solution of the series about $t_0=0$ is obtained.
Let:
$\begin{aligned} \overline{\mathcal{G}}(\mathrm{t}) & =\sum_{\kappa=0}^{\infty} \mathrm{b}_\kappa(\mathrm{t}-0)^\kappa=\sum_{\kappa=0}^{\infty} \mathrm{b}_\kappa \mathrm{t}^\kappa \\ & =\mathrm{b}_0+\mathrm{b}_1 \mathrm{t}+\mathrm{b}_2 \mathrm{t}^2+\mathrm{b}_3 \mathrm{t}^3+\cdots\end{aligned}$ (36)
Now, the first four coefficients are computed under boundary conditions:
$\begin{gathered}2-\alpha=\overline{\mathcal{G}}(0)=b_0+b_1(0)+b_2(0)^2+b_3(0)^3+\cdots=b_0 \\ \overline{\mathcal{G}}^{\prime \prime}(\mathrm{t})=\sum_{\kappa=2}^{\infty} \kappa(\kappa-1) \mathrm{d}_\kappa \mathrm{t}^{\mathrm{K}-2}=2 \mathrm{~d}_2+32 \mathrm{~d}_3 \mathrm{t}+\cdots \\ 4-\alpha=\overline{\mathcal{G}}^{\prime \prime}(0)=2 \mathrm{~b}_2 \rightarrow \mathrm{b}_2=\frac{4-\alpha}{2}\end{gathered}$
Similarly, the third derivative:
$\begin{aligned} \overline{\mathcal{G}}^{\prime \prime \prime}(\mathrm{t})= & \sum_{\kappa=3}^{\infty} \kappa(\kappa-1)(\kappa-2) \mathrm{b}_\kappa \mathrm{t}^{\mathrm{k}-3} \\ = & 6 \mathrm{~b}_3+4(3) 2 \mathrm{~b}_4 \mathrm{t}+\cdots \\ & \overline{\mathcal{G}}^{\prime \prime \prime}(0)=\overline{\mathcal{G}}(0)+4 \\ & 6 \mathrm{~b}_3=2-\alpha+4 \rightarrow b_3=\frac{6-\alpha}{6}\end{aligned}$
And so
$\begin{gathered}\overline{\mathcal{G}}^{\prime \prime}(1)=2 \mathrm{~b}_2+6 \mathrm{~b}_3+12 \mathrm{~b}_4=(5-\alpha) \mathrm{e} \\ \mathrm{b}_4=\frac{(5-\alpha) \mathrm{e}+2 \alpha-10}{12} \\ \overline{\mathcal{G}}(1)=\mathrm{b}_0+\mathrm{b}_1+\mathrm{b}_2+\mathrm{b}_3+\mathrm{b}_4=(3-\alpha) \mathrm{e} \\ \mathrm{b}_1=\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}=\frac{(-11 \alpha+31) \mathrm{e}+18 \alpha-50}{12}\end{gathered}$
Thus, we use Eq. (36) to solve for Eq. (34), we get:
$\sum_{\kappa=3}^{\infty} \kappa(\kappa-1)(\kappa-2) b_\kappa t^{\kappa-3}-\sum_{\kappa=0}^{\infty} b_\kappa t^\kappa=4 e^t$
Standard form of the first power series as:
$\begin{gathered}\sum_{\kappa=0}^{\infty}(\kappa+3)(\kappa+2)(\kappa+1) b_{\kappa+3} t^\kappa-\sum_{k=0}^{\infty} b_\kappa t^k=4 e^t \\ \sum_{k=0}^{\infty}\left((\kappa+3)(\kappa+2)(\kappa+1) b_{\kappa+3}-b_\kappa\right) t^\kappa=4 e^t\end{gathered}$
This must be removed for each t, so the total coefficient must be removed for each power of $t^\kappa$ separately:
$(\kappa+3)(\kappa+2)(\kappa+1) b_{\kappa+3}-b_\kappa=0, \forall \kappa$
We conclude that:
$\mathrm{b}_{\kappa+3}=\frac{\mathrm{d}_\kappa}{(\kappa+3)(\kappa+2)(\kappa+1)}, \forall \kappa$
There are eight cases of fuzzy solutions (n, m, l, s) for fuzzy DE Eqs. (29)-(30), as follows:
Case I: Given the first case in Algorithm 3.3, we get the following solutions:
$\begin{gathered}\Psi_{\underline{\mathcal{G}}_{\alpha, 3}}(\mathrm{t})=\alpha+\left(\left(\frac{11}{12} \alpha+\frac{3}{4}\right) \mathrm{e}-\frac{3}{2} \alpha-\frac{7}{6}\right) \mathrm{t}+\frac{\alpha+2}{2} \mathrm{t}^2+ \\ \frac{\alpha+4}{6} \mathrm{t}^3+\frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12} \mathrm{t}^4\end{gathered}$
$\begin{gathered}\Psi_{\overline{\mathcal{G}}_{\alpha, 3}}(\mathrm{t})=(2-\alpha)+\left(\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}\right) \mathrm{t}+ \\ \frac{4-\alpha}{2} \mathrm{t}^2+\frac{6-\alpha}{6} \mathrm{t}^3+\frac{(5-\alpha) \mathrm{e}+2 \alpha-10}{12} \mathrm{t}^4\end{gathered}$
Case II: Consider the second Case in Algorithm 3.3, we get the following solutions:
$\begin{gathered}\underline{\mathcal{G}}_\alpha=\alpha+\left(\left(\frac{11}{12} \alpha+\frac{3}{4}\right) \mathrm{e}-\frac{3}{2} \alpha-\frac{7}{6}\right) \mathrm{t}+\frac{4-\alpha}{2} \mathrm{t}^2+\frac{6-\alpha}{6} \mathrm{t}^3+ \\ \frac{(5-\alpha) \mathrm{e}+2 \alpha-10}{12} \mathrm{t}^4\end{gathered}$
$\begin{gathered}\overline{\mathcal{G}}_\alpha=(2-\alpha)+\left(\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}\right) \mathrm{t}+\frac{\alpha+2}{2} \mathrm{t}^2+ \\ \frac{\alpha+4}{6} \mathrm{t}^3+\frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12} \mathrm{t}^4\end{gathered}$
Case III: Consider the third Case in Algorithm 3.3, we get the following solutions:
$\begin{gathered}\underline{\mathcal{G}}_\alpha=\alpha+\left(\left(\frac{11}{12} \alpha+\frac{3}{4}\right) \mathrm{e}-\frac{3}{2} \alpha-\frac{7}{6}\right) \mathrm{t}+\frac{\alpha+2}{2} \mathrm{t}^2+\frac{\alpha+4}{6} \mathrm{t}^3+ \\ \frac{(5-\alpha) \mathrm{e}+2 \alpha-10}{12} \mathrm{t}^4\end{gathered}$
$\begin{gathered}\overline{\mathcal{G}}_\alpha=(2-\alpha)+\left(\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}\right) \mathrm{t}+\frac{4-\alpha}{2} \mathrm{t}^2+ \\ \frac{6-\alpha}{6} \mathrm{t}^3+\frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12} \mathrm{t}^4\end{gathered}$
Case IV: Consider the fourth Case in Algorithm 3.3, we get the following solutions:
$\begin{gathered}\underline{\mathcal{G}}_\alpha=\alpha+\left(\left(\frac{11}{12} \alpha+\frac{3}{4}\right) \mathrm{e}-\frac{3}{2} \alpha-\frac{7}{6}\right) \mathrm{t}+\frac{4-\alpha}{2} \mathrm{t}^2+\frac{6-\alpha}{6} \mathrm{t}^3+ \\ \frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12} \mathrm{t}^4\end{gathered}$
$\begin{aligned} & \overline{\mathcal{G}}_\alpha=(2-\alpha)+\left(\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}\right) \mathrm{t}+\frac{\alpha+2}{2} \mathrm{t}^2+ \\ & \frac{\alpha+4}{6} \mathrm{t}^3+\frac{(5-\alpha) \mathrm{e}+2 \alpha-10}{12} \mathrm{t}^4\end{aligned}$
Case V: Consider the fifth Case in Algorithm 3.3, and we get the following solutions:
$\begin{gathered}\underline{\mathcal{G}}_\alpha=\alpha+\left(\left(\frac{11}{12} \alpha+\frac{3}{4}\right) \mathrm{e}-\frac{3}{2} \alpha-\frac{7}{6}\right) \mathrm{t}+\frac{4-\alpha}{2} \mathrm{t}^2+\frac{6-\alpha}{6} \mathrm{t}^3+ \\ \frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12} \mathrm{t}^4\end{gathered}$
$\begin{gathered}\overline{\mathcal{G}}_\alpha=(2-\alpha)+\left(\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}\right) \mathrm{t}+\frac{4-\alpha}{2} \mathrm{t}^2+ \\ \frac{\alpha+4}{6} \mathrm{t}^3+\frac{(5-\alpha) \mathrm{e}+2 \alpha-10}{12} \mathrm{t}^4\end{gathered}$
Case VI: Consider the sixth Case in Algorithm 3.3, we get the following solutions:
$\begin{gathered}\underline{\mathcal{G}}_\alpha=\alpha+\left(\left(\frac{11}{12} \alpha+\frac{3}{4}\right) \mathrm{e}-\frac{3}{2} \alpha-\frac{7}{6}\right) \mathrm{t}+\frac{4-\alpha}{2} \mathrm{t}^2+\frac{\alpha+4}{6} \mathrm{t}^3+ \\ \frac{(5-\alpha) \mathrm{e}+2 \alpha-10}{12} \mathrm{t}^4\end{gathered}$
$\begin{gathered}\overline{\mathcal{G}}_\alpha=(2-\alpha)+\left(\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}\right) \mathrm{t}+\frac{\alpha+2}{2} \mathrm{t}^2+ \\ \frac{6-\alpha}{6} \mathrm{t}^3+\frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12} \mathrm{t}^4\end{gathered}$
Case VII: Consider the seventh Case in Algorithm 3.3, we get the following solutions:
$\begin{gathered}\underline{\mathcal{G}}_\alpha=\alpha+\left(\left(\frac{11}{12} \alpha+\frac{3}{4}\right) \mathrm{e}-\frac{3}{2} \alpha-\frac{7}{6}\right) \mathrm{t}+\frac{4-\alpha}{2} \mathrm{t}^2+\frac{\alpha+4}{6} \mathrm{t}^3+ \\ \frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12} \mathrm{t}^4\end{gathered}$
$\begin{aligned} & \overline{\mathcal{G}}_\alpha=(2-\alpha)+\left(\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}\right) \mathrm{t}+\frac{\alpha+2}{2} \mathrm{t}^2+ \\ & \frac{6-\alpha}{6} \mathrm{t}^3+\frac{(5-\alpha) e+2 \alpha-10}{12} t^4 \\ & \end{aligned}$
Case VIII: Consider the eighth Case in Algorithm 3.3, we get the following solutions
$\begin{gathered}\underline{\mathcal{G}}_\alpha=\alpha+\left(\left(\frac{11}{12} \alpha+\frac{3}{4}\right) \mathrm{e}-\frac{3}{2} \alpha-\frac{7}{6}\right) \mathrm{t}+\frac{\alpha+2}{2} \mathrm{t}^2+\frac{6-\alpha}{6} \mathrm{t}^3+ \\ \frac{(5-\alpha) \mathrm{e}+2 \alpha-10}{12} \mathrm{t}^4\end{gathered}$
$\begin{gathered}\overline{\mathcal{G}}_\alpha=(2-\alpha)+\left(\left(\frac{-11}{12} \alpha+\frac{31}{12}\right) \mathrm{e}+\frac{3}{2} \alpha-\frac{25}{6}\right) \mathrm{t}+\frac{4-\alpha}{2} \mathrm{t}^2+ \\ \frac{\alpha+4}{6} \mathrm{t}^3+\frac{(\alpha+3) \mathrm{e}-2 \alpha-6}{12} \mathrm{t}^4\end{gathered}$
The fuzzy solution of the FBVP Eq. (29) is represented by the combination of $\underline{\mathcal{G}}$ and $\overline{\mathcal{G}}$ as $\mathcal{G}_\alpha(\mathrm{t})=[\underline{\mathcal{G}}, \overline{\mathcal{G}}]$, for each $\alpha \in(0,1]$ and $\mathrm{t} \in[0,1]$. It is evident that for $\alpha=1$, we obtain $\underline{\mathcal{G}}(\mathrm{t})=\overline{\mathcal{G}}(\mathrm{t})$, which is the same precise solution to the non-fuzzy boundary value problem. Table 1 displays the outcomes of the calculations for the example shown above and is distilled into the following in Figure 1.
Table 1. An analysis of the results of the lower and upper solutions of Eqs. (29)-(30)
|
t |
$\underline{\mathcal{G}}$(t, α) |
$\overline{\mathcal{G}}$(t, α) |
E(t, α) |
|
0 |
1 |
1 |
1 |
|
0.1 |
1.2022 |
1.2022 |
1.2157 |
|
0.2 |
1.4398 |
1.4398 |
1.4657 |
|
0.3 |
1.7186 |
1.7186 |
1.7548 |
|
0.4 |
2.0450 |
2.0450 |
2.0886 |
|
0.5 |
2.4260 |
2.4260 |
2.4731 |
|
0.6 |
2.8693 |
2.8693 |
2.9154 |
|
0.7 |
3.3830 |
3.3830 |
3.4234 |
|
0.8 |
3.9758 |
3.9758 |
4.0060 |
|
0.9 |
4.6570 |
4.6570 |
4.6732 |
|
1 |
5.4366 |
5.4366 |
5.4366 |
Figure 1. RPSM solution of Eqs. (29)-(30) for many values of α
In this paper, we present the following conclusions:
1. It is suggested that an algorithm be built to resolve fuzzy BVPs. In order to solve a fourth-order FBVP with fuzzy boundary conditions, the offered problem is treated by depending on RPS, which fields appropriate and useful solutions in a variety of applications.
2. The outcomes can be verified using α=1, where the upper solution and lower solution must be equal.
3. FBVPs can be seen as a popularization of the non-fuzzy boundary value issues since the fuzzy solution can be obtained from the non-fuzzy solution by setting α=1.
4. The proposed method "residual power series" proved valid in solving FBVPs.
The authors would like to thank Mustansiriyah University (www.uomustansiriyah.edu.iq) Baghdad – Iraq for its support in the present work.
|
FBVPs |
Fuzzy Boundary Value Problems |
|
FDEs |
Fuzzy Differential Equations |
|
RPSM |
Residual Power Series Method |
|
Res |
Residual functions |
|
Greek symbols |
|
|
α |
Fuzzy level sets |
|
$\Psi_{\mathcal{G}_{\alpha, K}(\mathrm{t})}$ |
the n-th-truncated series |
|
$\tau$ |
Element of fuzzy membership function |
|
Subscripts |
|
|
N |
Point index in the interval |
|
$\mathcal{G}_\alpha$ |
a-level set of a fuzzy set $\tilde{\mathcal{G}}$ |
|
$\tilde{\mathcal{G}}$ |
Fuzzy set |
[1] Chang, S.S., Zadeh, L.A. (1972). On fuzzy mapping and control. IEEE Transactions on Systems, Man, and Cybernetics, 2(1): 30-34. https://doi.org/10.1109/TSMC.1972.5408553
[2] Puri, M.L., Ralescu, D.A. (1983). Differentials of fuzzy functions. Journal of Mathematical Analysis and Applications, 91(2): 552-558. https://doi.org/10.1016/0022-247X(83)90169-5
[3] O'Regan, D., Lakshmikantham, V., Nieto, J.J. (2003). Initial and boundary value problems for fuzzy differential equations. Nonlinear Analysis: Theory, Methods & Applications, 54(3): 405-415. https://doi.org/10.1016/S0362-546X(03)00097-X
[4] Khastan, A., Nieto, J.J. (2010). A boundary value problem for second order fuzzy differential equations. Nonlinear Analysis: Theory, Methods & Applications, 72(9-10): 3583-3593. https://doi.org/10.1016/j.na.2009.12.038
[5] Sabir, Z., Baleanu, D., Shoaib, M., Raja, M.A.Z. (2021). Design of stochastic numerical solver for the solution of singular three-point second-order boundary value problems. Neural Computing and Applications, 33: 2427-2443. https://doi.org/10.1007/s00521-020-05143-8
[6] Qayyum, M., Oscar, I. (2021). Least square homotopy perturbation method for ordinary differential equations. Journal of Mathematics, 2021: 1-16. https://doi.org/10.1155/2021/7059194
[7] Arifeen, S.U., Haq, S., Ghafoor, A., Ullah, A., Kumam, P., Chaipanya, P. (2021). Numerical solutions of higher order boundary value problems via wavelet approach. Advances in Difference Equations, 2021: 1-15. https://doi.org/10.1186/s13662-021-03495-6
[8] Umar, M., Amin, F., Wahab, H.A., Baleanu, D. (2019). Unsupervised constrained neural network modeling of boundary value corneal model for eye surgery. Applied Soft Computing, 85: 105826. https://doi.org/10.1016/j.asoc.2019.105826
[9] Haq, S., Hussain, M. (2018). Selection of shape parameter in radial basis functions for solution of time-fractional Black–Scholes models. Applied Mathematics and Computation, 335: 248-263. https://doi.org/10.1016/j.amc.2018.04.045
[10] Adak, M., Mandal, A. (2021). Numerical solution of fourth-order boundary value problems for Euler-Bernoulli beam equation using FDM. Journal of Physics: Conference Series, 2070(1): 012052. https://doi.org/10.1088/1742-6596/2070/1/012052
[11] Adeyeye, O., Omar, Z. (2019). Solving fourth order linear initial and boundary value problems using an implicit block method. In: Kor, LK., Ahmad, AR., Idrus, Z., Mansor, K. (eds.) Proceedings of the Third International Conference on Computing, Mathematics and Statistics (iCMS2017), Springer, Singapore. https://doi.org/10.1007/978-981-13-7279-7_21
[12] Palamides, P.K., Palamides, A.P. (2012). Fourth-order four-point boundary value problem: A solutions funnel approach. International Journal of Mathematics and Mathematical Sciences, 2012: 375634. https://doi.org/10.1155/2012/375634
[13] Komashynska, I., Al-Smadi, M., Ateiwi, A., Al-Obaidy, S. (2016). Approximate analytical solution by Residual Power Series Method for system of Fredholm integral equations. Applied Mathematics & Information Sciences, 10(3): 975-985. https://doi.org/10.18576/amis/100315
[14] Qayyum, M., Fatima, Q., Sohail, M., El-Zahar, E.R., Gokul, K.C. (2022). Extended residual power series algorithm for boundary value problems. Mathematical Problems in Engineering, 2022: 1-14. https://doi.org/10.1155/2022/1039222
[15] Mahmood, B.A., Yousif, M.A. (2017). A residual power series technique for solving Boussinesq–Burgers equations. Cogent Mathematics, 4(1): 1279398. https://doi.org/10.1080/23311835.2017.1279398
[16] Hasan, S., Al-Smadi, M., Freihet, A., Momani, S. (2019). Two computational approaches for solving a fractional obstacle system in Hilbert space. Advances in Difference Equations, 2019(1): 1-17. https://doi.org/10.1186/s13662-019-1996-5
[17] Gul, M., Khan, H., Ali, A. (2022). The solution of fifth and sixth order linear and non linear boundary value problems by the Improved Residual Power Series Method. Journal of Mathematical Analysis and Modeling, 3(1): 1-14. https://doi.org/10.48185/jmam.v3i1.386
[18] Dubey, V.P., Kumar, R., Kumar, D., Khan, I., Singh, J. (2020). An efficient computational scheme for nonlinear time fractional systems of partial differential equations arising in physical sciences. Advances in Difference Equations, 2020: 1-27. https://doi.org/10.1186/s13662-020-2505-6
[19] Kumar, A., Kumar, S., Yan, S.P. (2017). Residual power series method for fractional diffusion equations. Fundamenta Informaticae, 151(1-4): 213-230. https://doi.org/10.3233/FI-2017-1488
[20] Arqub, O.A. (2013). Series solution of fuzzy differential equations under strongly generalized differentiability. Journal of Advanced Research in Applied Mathematics, 5(1): 31-52. http://dx.doi.org/10.5373/jaram.1447.051912
[21] Jameel, A.F., Anakira, N.R., Shather, A.H., Saaban, A., Alomari, A.K. (2020). Numerical algorithm for solving second order nonlinear fuzzy initial value problems. International Journal of Electrical and Computer Engineering (IJECE), 10(6): 6497-6506. https://doi.org/10.11591/ijece.v10i6.pp6497-6506
[22] Anakira, N.R., Shather, A.H., Jameel, A.F., Alomari, A.K., Saaban, A. (2019). Direct solution of uncertain bratu initial value problem. International Journal of Electrical and Computer Engineering, 9(6): 5075. https://doi.org/10.11591/ijece.v9i6.pp5075-5083
[23] Prakash, P., Uthirasamy, N., Priya, G.S. (2014). Third order three point fuzzy boundary value problem under generalized differentiability. Journal of applied mathematics & Informatics, 32(5): 791-805. https://doi.org/10.14317/jami.2014.791
[24] Nguyen, H.T. (1978). A note on the extension principle for fuzzy sets. Journal of Mathematical Analysis and Applications, 64(2): 369-380. https://doi.org/10.1016/0022-247X(78)90045-8