Somia Guechi![]()
© 2024 The author. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
According to common knowledge, the first kind of Volterra integral equation is an example of a problem that is not well-posed. This kind of equation is encountered in several problems of science, and it is useful in a variety of fields, including control theory, nuclear reactors, and ecological systems, where it can be used to evolutionary processes. In this article, we'll present an effective and accurate technique to converting VK1 into those of the second kind (VK2) and the kernel must not be zero for the conversion process to be effective, and we will find the approximation solutions of them by using the decomposition of Taylor series with Nyström method (Trapezoidal and Simpson’s rules). In finality, we will present a variety of numerical examples to demonstrate that the conversion that has been proposed is both successful and stable.
Volterra-Hammerstein integral equation, finite difference method, Ill-posed problems, Nyström method
In this work, a direct regularization technique for solving nonlinear ill-posed operator equations will be presented:
$A \phi=f$ (1)
where the nonlinear operator $A: D \rightarrow F$ is defined for $\phi \in D$ and $f \in F$ which are Hilbert or Banach spaces.
It is well known that the first kind Volterra integral equation (VK1) is inherently ill-posed. In literature, Tikhonov [1] and Phillips [2] developed the regularization techniques for these ill-posed equations, Eq. (1). Many different methods of regularizing VK1 have been presented like as Kabanikhin method [3] and Denisov method [4]. For further information and additional details on regularization and computational solutions for ill-posed Volterra equations, refer to references [1-3, 5-12].
The theory and applications of integral equations such as elasticity, semi-conductors, scattering theory, metallurgy, seismology, thermal conditions, fluid flow, population dynamics, chemical processes, etc., are discussed in the book "Leçons sur les équations intégrales et intégro-différentielles" written by Vito Volterra. This book was published in 1913, illustrated by Wazwaz [5].
Concerning the subject of this work is the first kind nonlinear Volterra integral equation of the form:
$\int_a^t k(t, x) F(\phi(x)) d x=f(t), \quad a \leq x \leq t \leq b$ (2)
where $\phi(t)$ is unknown function, $F(\phi(x))$ is a nonlinear function of $\phi(x), k(t, x)$ is a kernel and $f(t)$ is given function in $a \leq x \leq t \leq b$ with $f(a)=0$, we will take:
$A \phi(t): A(t)=\int_a^t k(t, x) F(\phi(x)) d x . \quad t \in[a, b]$
In this part, we’ll transmit the nonlinear integral equation Eq. (2) to a second kind integral equation defined in the interval I=[0,1]. It is necessary to highlight that the solution for ill-posed problems is generally unstable, and slight changes can make large errors. The Leibnitz theorem and the Taylor series are going to be applied in the next section:
Let $A(t)$ be a function with $\mathrm{n}$ derivatives with respect to $t$ in $I=[0,1]$ than for $0<t-\varepsilon<t<t+\varepsilon<1$, with $\varepsilon \rightarrow 0$. The Taylor series is given by
$\begin{aligned} A(t+\varepsilon) & =A(t)+\frac{\varepsilon}{1 !} \cdot \frac{\partial A(t)}{\partial t}+\frac{\varepsilon^2}{2 !} \cdot \frac{\partial^2 A(t)}{\partial t^2}+\cdots +\frac{\varepsilon^n}{n !} \cdot \frac{\partial^n A(t)}{\partial t^n}+O\left(\varepsilon^n\right), \\ A(t-\varepsilon) & =A(t)-\frac{\varepsilon}{1 !} \cdot \frac{\partial A(t)}{\partial t}+\frac{\varepsilon^2}{2 !} \cdot \frac{\partial^2 A(t)}{\partial t^2}-\cdots +(-1)^n \frac{\varepsilon^n}{n !} \cdot \frac{\partial^n A(t)}{\partial t^n}+O\left(\varepsilon^n\right),\end{aligned}$
where, $O\left(\varepsilon^n\right)$ is the approximation error term. For the derivation of higher order approximations to derivatives of any order, the Taylor expansion is a very helpful tool. If $\varepsilon$ is small, then higher order accuracy generally means higher accuracy. The first order of Taylor series is given by:
$A(t+\varepsilon)=A(t)+\frac{\varepsilon}{1 !} \cdot \frac{\partial A(t)}{\partial t}+O(\varepsilon)$ (3)
$A(t-\varepsilon)=A(t)-\frac{\varepsilon}{1 !} \cdot \frac{\partial A(t)}{\partial t}+O(\varepsilon)$ (4)
The Leibnitz rule is a famous rule utilizing for differentiation of integrals [5]. Let $A(t)$ and $\frac{\partial A(t)}{\partial t}$ be continuous in the domain $0 \leq t \leq 1$, and let:
$A(t)=\int_{g(t)}^{h(t)} H(t, x) d x$,
then differentiation of the integral in $A(t)$ exists and is given by:
$\begin{aligned} & \frac{\partial A(t)}{\partial t}=H(t, h(t)) \frac{d h(t)}{d t}-H(t, g(t)) \frac{d g(t)}{d t} +\int_{g(t)}^{h(t)} \frac{\partial H(t, x)}{\partial t} d x .\end{aligned}$
In our previous work [12, 13], we converted the Volterra-Hammerstein integral Eq. (2) to a second kind integral equation defined in the interval [0, 1] by using Taylor series of the first order Eq. (3) (This approximation is known as: "fda" the forward difference approximate of $A(t)$), we obtained this equivalent equation:
$\begin{aligned} & \int_a^{t+\varepsilon} k(t+\varepsilon, x) F\left(\phi_{\varepsilon}(x)\right) d x=f(t)+\varepsilon k(t, t) F\left(\phi_{\varepsilon}(t)\right) +\varepsilon \int_a^t \frac{\partial k}{\partial t}(t, x) F\left(\phi_{\varepsilon}(x)\right) d x=f(t+\varepsilon)\end{aligned}$,
then, we get a well-posed integral equation (VK2), which is given by:
$\begin{gathered}F\left(\phi_{\varepsilon}(t)\right)+\int_a^t \frac{k(t, x)+\varepsilon \frac{\partial k(t, x)}{\partial t}}{\varepsilon k(t, t)} F\left(\phi_{\varepsilon}(x)\right) d x=\frac{f(t+\varepsilon)}{\varepsilon k(t, t)}, \\ \varepsilon \rightarrow 0, \text { and } k(t, t) \neq 0 .\end{gathered}$ (5)
Eq. (5) can be rewritten as follows:
$\Phi_{\varepsilon}(t)+\int_0^t K(t, x) \Phi_{\varepsilon}(x) d x=f_{\varepsilon}(t)$ (6)
where,
$\begin{gathered}K(t, x)=\frac{k(t, x)+\varepsilon \frac{\partial k(t, x)}{\partial t}}{\varepsilon k(t, t)}, f_{\varepsilon}(t)=\frac{f(t+\varepsilon)}{\varepsilon k(t, t)} \\ \Phi_{\varepsilon}=F\left(\phi_{\varepsilon}(t)\right)=\Phi \text { if } \varepsilon \rightarrow 0\end{gathered}$.
and $\phi_{\varepsilon}(t)=F^{-1}\left(\Phi_{\varepsilon}(t)\right)=\phi(t)$ if $\varepsilon \rightarrow 0$. Substituting $t=0$ into Eq. (6) gives the initial condition $\Phi_{\varepsilon}(0)=\Phi_0$. For more details, refer to references [11-13].
If we use the Taylor series of the first order Eq. (4) (the first order backward difference approximation "bda"), and Leibnitz rule, we get a well-posed integral equation (VK2), which is given by:
$\begin{gathered} & F\left(\phi_{\varepsilon}(t)\right)+\int_a^t \frac{-k(t, x)+\varepsilon \frac{\partial k(t, x)}{\partial t}}{\varepsilon k(t, t)} F\left(\phi_{\varepsilon}(x)\right) d x =\frac{-f(t-\varepsilon)}{\varepsilon k(t, t)}, \\ &\varepsilon \rightarrow 0, \text { and } k(t, t) \neq 0 .\end{gathered}$ (7)
Eq. (7) can be simplified as follows:
$\Phi_{\varepsilon}(t)+\int_0^t K(t, x) \Phi_{\varepsilon}(x) d x=f_{\varepsilon}(t)$,
where
$\begin{aligned} & K(t, x)=\frac{k(t, x)+\varepsilon \frac{\partial k(t, x)}{\partial t}}{\varepsilon k(t, t)} \\ & f_{\varepsilon}(t)=\frac{-f(t-\varepsilon)}{\varepsilon k(t, t)} \\ & \Phi_{\varepsilon}=F\left(\phi_{\varepsilon}(t)\right)=\Phi \text { if } \varepsilon \rightarrow 0\end{aligned}$
Now, if we use Eq. (3) and Eq. (4) (the central difference approximation "cda") of the flowing form:
$A(t+\varepsilon)-A(t-\varepsilon) \approx 2 \frac{\varepsilon}{1 !} A^{\prime}(t)+O(\varepsilon), \quad \varepsilon \rightarrow 0$
and Leibnitz rule, we get a well-posed integral equation (VK2), which is given by:
$\begin{gathered} & F\left(\phi_{\varepsilon}(t)\right)+\int_a^t \frac{k^{\prime}(t, x)}{k(t, t)} F\left(\phi_{\varepsilon}(x)\right) d x =\frac{f(t+\varepsilon)-f(t-\varepsilon)}{2 \varepsilon k(t, t)}, \\ &\varepsilon \rightarrow 0, \text { and } k(t, t) \neq 0 .\end{gathered}$
Eq. (8) can be rewritten in the form:
$\Phi_{\varepsilon}(t)+\int_0^t K(t, x) \Phi_{\varepsilon}(x) d x=f_{\varepsilon}(t)$,
where,
$\begin{aligned} & K(t, x)=\frac{k^{\prime}(t, x)}{k(t, t)}, f_{\varepsilon}(t)=\frac{f(t+\varepsilon)-f(t-\varepsilon)}{2 \varepsilon k(t, t)} \\ & \Phi_{\varepsilon}=F\left(\phi_{\varepsilon}(t)\right)=\Phi \text { if } \varepsilon \rightarrow 0 .\end{aligned}$
Now, we state the theorem of the existence and uniqueness of the solution to Volterra integral equation of the first kind [14, 15]:
Theorem [14]: Assume that,
Then:
$\int_0^t k(t, x) \Phi(x) d x=f(t), \quad 0 \leq x \leq t \leq T$
has a unique continuous solution. This solution is identical with the continuous solution of
$k(t, x) \Phi(x)+\int_a^t \frac{\partial k(t, x)}{\partial t} \Phi(x) d x=f^{\prime}(t)$.
There are different iterative methods available for resolving nonlinear Volterra integral equations such as variational iteration method, Adomian's decomposition method, and homotopy perturbation method [16-18]. In our previous research [12], we applied the variational iteration method with Taylor series for solving the above ill-posed problem Eq. (2) which is equivalent to the well-posed problems Eq. (5), Eq. (7) and Eq. (8). Having converted the above integral equation of the first kind to the linear Volterra integral equation of the second kind, we then can use any numerical method like Nyström methods; trapezoidal method, Simpson method, modified Simpson method.
In this section, we shall describe the quadrature or Nyström method (Trapezoidal rule and Simpson’s rule….), for the approximate solution of linear Volterra integral equations of the second kind with continuous kernels.
The quadrature methods are intended to estimate the definite integral of $f(t)$ over the interval $I=[a, b]$ by evaluating $f(t)$ at a finite number of sample points.
Assume that:
$a=t_1^{(n)}<t_2^{(n)}<\cdots<t_n^{(n)}=b$.
A form of formula:
$Q_n[f]=\sum_{i=1}^n w_i^{(n)} f\left(t_i^{(n)}\right)$,
with a property that
$\int_a^b f(t) d t=Q_n[f]+E[f]$,
The term $E[f]$ is called the truncation error for integration. The values $\left\{t_i^{(n)}\right\}_{i=1}^n$ are called the quadrature nodes and $\left\{w_i^{(n)}\right\}_{i=1}^n$ are called the weights. A sequence $Q[f]$ of quadrature formulas is called convergent if $Q_n[f] \rightarrow Q[f]$, $n \rightarrow \infty$, for all $f \in C(I) [16]$.
Corollary [19] (Trapezoidal rule: Error analysis)
Suppose that $[a, b]$ is subdivided into $\mathrm{n}$ subintervals $\left[t_i, t_{i+1}\right]$ of width $h=(b-a) / n$. The composite trapezoidal rule:
$T(f, h)=\frac{h}{2}(f(a)+f(b))+h \sum_{i=1}^{n-1} f\left(x_i\right)$
is an approximation to the integral
$\int_a^b f(x) d x=T(f, h)+E_T(f, h)$.
Furthermore, if $f \in C^2[a, b]$, there exists a value $c$ with $a<c<b$ so that the error term $E_T(f, h)$ has the form:
$E_T(f, h)=\frac{-(b-a) f^{(2)}(c) h^2}{12}=O\left(h^2\right)$.
The linear integral of the second kind can be mathematically approximated using any quadrature rule, as shown below:
$\int_I k(t, x,) \phi(x) d x \approx \sum_{j=1}^n w_j k\left(t, x_j,\right) \phi\left(x_j\right)$,
with quadrature points (nodes) $\left\{x_j\right\}_{j=1}^n$ contained in $I$ and real quadrature weights $\left\{w_j\right\}_{j=1}^n$.
$\phi_n(t)+\sum_{j=1}^n w_j k\left(t, x_j\right) \phi_n\left(x_j\right)=f(t)$,
where $\phi_n(t)$ is an approximation to $\phi(t)$.
By the numerical integration formulas of Trapezium rule, so we get
$\phi\left(t_j\right)=f\left(t_j\right)+\frac{h}{2}\left[\begin{array}{l}k\left(t_j, t_1\right) \phi\left(t_1\right)+2 \sum_{i=2}^{j-1} k\left(t_j, t_i\right) \phi\left(t_i\right) \\ +k\left(t_j, t_J\right) \phi\left(t_J\right)\end{array}\right]$
We will now apply modified Simpson method and take $\Phi_{\varepsilon}(t)=\Phi(t)$. Consider let
$t_0=0<t_1<\cdots<t_{2 j}<\cdots<t_{2 n}=1$,
be a step's equidistant subdivision $h=t_{2 j+1}-t_{2 j}$ for $j=0,1, \ldots, n$. The goal is to approximate the solutions of the approximation of the second kind equation Eq. (5), Eq. (7) or Eq. (8) to the all nodes of 2j indices (at the point $t_{2 j}$), then the form of modified Simpson method is:
$\int_{t_{2 j}}^{t_{2 j+2}} g(t) d t=\frac{h}{3}\left[g\left(t_{2 j}\right)+4 g\left(t_{2 j+1}\right)+g\left(t_{2 j+2}\right)\right]$,
where the integration error is $O(h)=-2 \frac{(h / 2)^5}{90}(g(\zeta))^{(4)}$. This method has been used by Nadir and Rahmoune [20].
By using this method can be written the equation Eq. (5), Eq. (7) and Eq. (8) of the second kind in the algorithm of the following form:
$\begin{aligned} \Phi\left(t_{2 j}\right)= & \frac{h}{3} \sum_{i=0}^{j-1}\left[\begin{array}{l}K\left(t_{2 j}, x_{2 i}\right) \Phi\left(t_{2 i}\right)+4 K\left(t_{2 j}, x_{2 i+1}\right) \Phi\left(t_{2 i+1}\right) \\ +K\left(t_{2 j}, x_{2 i+2}\right) \Phi\left(t_{2 i+2}\right)\end{array}\right] +f\left(t_{2 j}\right)\end{aligned}$
We approximate $\Phi_{2 i+1}$ by $\frac{\Phi_{2 i}+\Phi_{2 i+2}}{2}$, the Eq. (5) becomes:
$\begin{aligned} & \Phi_{2 j}\left(1-\frac{h}{3}\left(2 K_{2 j, 2 j-1}+K_{2 j, 2 j}\right)\right) = f_{2 j}+\left(\frac{h}{3}\left(K_{2 j, 0}+2 K_{2 j, 1}\right)\right) \Phi_0 \\ & +\frac{2 h^2}{3} \sum_{i=0}^{j-1}\left(K_{2 j, 2 i}+2 K_{2 j, 2 i+1}\right) \Phi_{2 i} +\frac{2 h^2}{3} \sum_{i=0}^{j-1}\left(2 K_{2 j, 2 i+1}+K_{2 j, 2 i+2}\right) \Phi_{2 i+2} .\end{aligned}$
We are able to calculate the approximate solutions $\Phi$ of the equations Eq. (5), Eq. (7) and Eq. (8) by using recurrence. in all points $t_{2 j}$ for $j=0,1, \ldots, n$. It is evident that the initial value of $\Phi$ is $\Phi(0)=\Phi_0=f_{\varepsilon}(0)$. Suppose that $F\left(\phi_{\varepsilon}(t)\right)$ is invertible. After that, we will be able to set:
$\phi_{\varepsilon}=F^{-1}(\Phi(t))$
Our method of conversion for nonlinear ill-posed Volterra equations will be demonstrated by discussing examples that follow, and we will compare the numerical results between three approximate Eqs. (5)-(8). Rather than conducting an exhaustive investigation of the numerical properties, the objective is to illustrate the viability of the proposed method.
Example 1: [12]
Let be a Volterra -Hammerstein integral equation of the form:
$\int_0^t(10 t+6-10 x) \log |\phi(x)| d x=9 t^2+5 t^3, \quad 0 \leq x \leq t \leq 1$
To solve this equation, first we convert it to linear VK2 of the second kind (VK2fda, VK2bda and VK2cda, respectively) given by:
$\begin{aligned} & \Phi_{\varepsilon}(t)+\int_0^t \frac{10 t-10 x+6+10 \varepsilon}{6 \varepsilon} \Phi_{\varepsilon}(x) d x=\frac{9(t+\varepsilon)^2+5(t+\varepsilon)^3}{6 \varepsilon} \\ & \Phi_{\varepsilon}(t)+\int_0^t \frac{-10 t+10 x-6+10 \varepsilon}{6 \varepsilon} \Phi_{\varepsilon}(x) d x=\frac{9(t-\varepsilon)^2+5(t-\varepsilon)^3}{-6 \varepsilon} \\ & \Phi_{\varepsilon}(t)+\int_0^t \frac{5}{3} \Phi_{\varepsilon}(x) d x=\frac{9(t+\varepsilon)^2+5(t+\varepsilon)^3-9(t-\varepsilon)^2-5(t-\varepsilon)^3}{12 \varepsilon}\end{aligned}$
for $t \in[0,1]$ with $\Phi_{\varepsilon}(t)=\log |\phi(t)|$, the exact solution is:
$\phi(t)=e^{3 t}$.
Table 1. Comparison of the absolute errors for Example 1 of VK2fda, VK2bda and VK2cda obtained by Taylor approximation $\left(\varepsilon=10^{-4}\right)$ and Nyström method (n=20)
|
t2j Simpson |
Error of VK2fda |
Error of VK2cda |
Error of VK2bda |
|
0 |
1.5002e-04 |
8.3333e-09 |
1.4998e-04 |
|
0.1 |
2.0080e-04 |
9.5217e-09 |
2.2815e-04 |
|
0.2 |
2.6877e-04 |
1.0879e-08 |
3.4707e-04 |
|
0.3 |
3.5974e-04 |
1.2431e-08 |
5.2797e-04 |
|
0.4 |
4.8151e-04 |
1.4204e-08 |
8.0316e-04 |
|
0.5 |
6.4450e-04 |
1.6229e-08 |
1.2218e-03 |
|
0.6 |
8.6265e-04 |
1.8541e-08 |
1.8586e-03 |
|
0.7 |
1.1547e-03 |
2.1188e-08 |
2.8274e-03 |
|
0.8 |
1.5455e-03 |
2.4189e-08 |
4.3011e-03 |
|
0.9 |
2.0687e-03 |
2.7648e-08 |
6.5430e-03 |
|
1 |
2.7689e-03 |
3.1610e-08 |
9.9534e-03 |
|
t2j Trapeziodal |
Error of VK2fda |
Error of VK2cda |
Error of VK2bda |
|
0 |
1.5002e-04 |
8.3333e-09 |
1.4998e-04 |
|
0.1 |
6.4960e-04 |
9.5210e-09 |
1.2329e-03 |
|
0.2 |
2.0299e-03 |
1.0878e-08 |
3.1277e-03 |
|
0.3 |
4.3391e-03 |
1.2428e-08 |
6.3570e-03 |
|
0.4 |
8.1256e-03 |
1.4199e-08 |
1.1770e-02 |
|
0.5 |
1.4252e-02 |
1.6223e-08 |
2.0743e-02 |
|
0.6 |
2.4076e-02 |
1.8533e-08 |
3.5511e-02 |
|
0.7 |
3.9728e-02 |
2.1177e-08 |
5.9687e-02 |
|
0.8 |
6.4551e-02 |
2.4176e-08 |
9.9128e-02 |
|
0.9 |
1.0379e-01 |
2.7631e-08 |
1.6330e-01 |
|
1 |
1.6569e-01 |
3.1588e-08 |
2.6752e-01 |
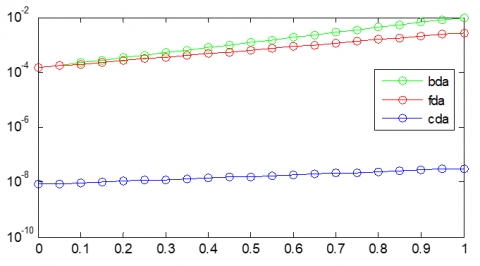
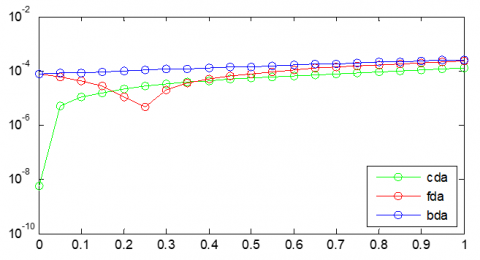
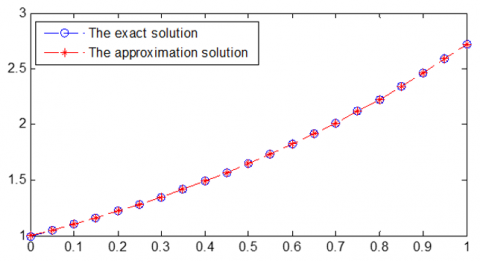
Figure 1. Comparison of resultants to Example 1, for n=20 and $\varepsilon$ = 10-4 by Simpson method
Example 2: [8]
Let be a Volterra -Hammerstein integral equation of the form:
$\begin{aligned} & \int_0^t(\sin (t-x)+1) \cos (\phi(x)) d x=\frac{t \sin t}{2}+\sin t, \\ & 0 \leq x \leq t \leq 1\end{aligned}$
To solve this equation, first we convert it to linear VK2 of the second kind (VK2fda, VK2bda and VK2cda, respectively) given by:
$\begin{aligned} & \Phi_{\varepsilon}(t)+\int_0^t \frac{\sin (t-x)+1+\varepsilon \cos (t-x)}{\varepsilon} \Phi_{\varepsilon}(x) d x = \frac{(t+\varepsilon+2) \sin (t+\varepsilon)}{2 \varepsilon} \\ & \Phi_{\varepsilon}(t)-\int_0^t \frac{\sin (t-x)+1-\varepsilon \cos (t-x)}{\varepsilon} \Phi_{\varepsilon}(x) d x = \frac{(\varepsilon-t-2) \sin (t-\varepsilon)}{2 \varepsilon} \\ & \Phi_{\varepsilon}(t)+\int_0^t \cos (t-x) \Phi_{\varepsilon}(x) d x = \frac{(t+\varepsilon+2) \sin (t+\varepsilon)-(t-\varepsilon+2) \sin (t-\varepsilon)}{4 \varepsilon}\end{aligned}$
for $t \in[0,1]$ with $\Phi_{\varepsilon}(t)=\cos (\phi(t))$.
The exact solution is:
$\phi(t)=t$.
Table 2. Comparison of the absolute errors for Example 2 of VK2fda, VK2bda and VK2cda obtained by Taylor approximation $\left(\varepsilon=10^{-4}\right)$ and Nyström method (n=20)
|
t2j Simpson |
Error of VK2fda |
Error of VK2cda |
Error of VK2bda |
|
0 |
9.9998e-03 |
5.7735e-05 |
1.0000e-02 |
|
0.1 |
5.0009e-04 |
4.9477e-05 |
6.0614e-04 |
|
0.2 |
2.4721e-04 |
4.6874e-05 |
3.6699e-04 |
|
0.3 |
1.6198e-04 |
4.4267e-05 |
2.9405e-04 |
|
0.4 |
1.1847e-04 |
4.1656e-05 |
2.6364e-04 |
|
0.5 |
9.1614e-05 |
3.9037e-05 |
2.5100e-04 |
|
0.6 |
7.3061e-05 |
3.6406e-05 |
2.4800e-04 |
|
0.7 |
5.9226e-05 |
3.3757e-05 |
2.5130e-04 |
|
0.8 |
4.8310e-05 |
3.1084e-05 |
2.5938e-04 |
|
0.9 |
3.9311e-05 |
2.8379e-05 |
2.7155e-04 |
|
1 |
3.1619e-05 |
2.5632e-05 |
2.8759e-04 |
|
t2j Trapezoidal |
Error of VK2fda |
Error of VK2cda |
Error of VK2bda |
|
0 |
9.9998e-03 |
5.7735e-05 |
1.0000e-02 |
|
0.1 |
1.5380e-04 |
3.9742e-04 |
1.0217e-03 |
|
0.2 |
1.0231e-04 |
3.7812e-04 |
7.9744e-04 |
|
0.3 |
1.9265e-04 |
3.6031e-04 |
7.4007e-04 |
|
0.4 |
2.4253e-04 |
3.4369e-04 |
7.2760e-04 |
|
0.5 |
2.7712e-04 |
3.2815e-04 |
7.3592e-04 |
|
0.6 |
3.0495e-04 |
3.1361e-04 |
7.5750e-04 |
|
0.7 |
3.2983e-04 |
3.0000e-04 |
7.8963e-04 |
|
0.8 |
3.5383e-04 |
2.8727e-04 |
8.3157e-04 |
|
0.9 |
3.7829e-04 |
2.7537e-04 |
8.8358e-04 |
|
1 |
4.0420e-04 |
2.6426e-04 |
9.4658e-04 |
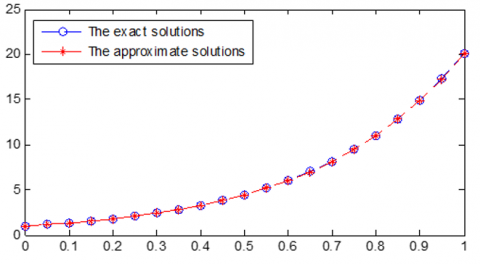
Figure 2. Comparison of resultants to Example 2, for n=20 and $\varepsilon$ = 10-4 by Simpson method
Example 3: [8]
Let be a Volterra -Hammerstein integral equation of the form:
$\begin{aligned} & \int_0^t e^{t-x} \phi^2(x) d x=e^{2 t}-e^t, \\ & 0 \leq x \leq t \leq 1\end{aligned}$
To solve this equation, first we convert it to linear VK2 of the second kind (VK2fda, VK2bda and VK2cda, respectively) of the flowing form:
$\begin{aligned} & \Phi_{\varepsilon}(t)+\int_0^t \frac{1+\varepsilon}{\varepsilon} e^{t-x} \Phi_{\varepsilon}(x) d x =\frac{e^{2(t+\varepsilon)}-e^{(t+\varepsilon)}}{\varepsilon} \\ & \Phi_{\varepsilon}(t)+\int_0^t \frac{-1+\varepsilon}{\varepsilon} e^{t-x} \Phi_{\varepsilon}(x) d x =\frac{-e^{2(t-\varepsilon)}+e^{(-t+\varepsilon)}}{\varepsilon} \\ & \Phi_{\varepsilon}(t)+\int_0^t e^{t-x} \Phi_{\varepsilon}(x) d x =\frac{e^{2(t+\varepsilon)}-e^{(t+\varepsilon)}-e^{2(t-\varepsilon)}+e^{(t-\varepsilon)}}{2 \varepsilon} \\ & \end{aligned}$
for $t \in[0,1], \Phi_{\varepsilon}(t)=\phi^2(t)$.
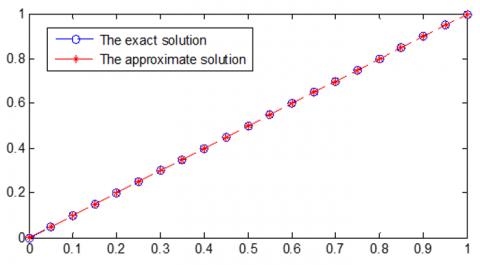
The exact solution is:
$\phi(t)=e^t$.
Table 3. Comparison of the absolute errors for Example 3 of VK2fda, VK2bda and VK2cda obtained by Taylor approximation $\left(\varepsilon=10^{-4}\right)$ and Nyström method (n=20)
|
t2j Simpson |
Error of VK2fda |
Error of VK2cda |
Error of VK2bda |
|
0 |
7.5003e-05 |
5.8333e-09 |
7.4997e-05 |
|
0.1 |
4.2112e-05 |
1.0427e-05 |
8.6028e-05 |
|
0.2 |
1.0755e-05 |
2.0965e-05 |
9.8212e-05 |
|
0.3 |
1.9516e-05 |
3.1712e-05 |
1.1167e-04 |
|
0.4 |
4.9126e-05 |
4.2777e-05 |
1.2653e-04 |
|
0.5 |
7.8474e-05 |
5.4270e-05 |
1.4295e-04 |
|
0.6 |
1.0795e-04 |
6.6307e-05 |
1.6109e-04 |
|
0.7 |
1.3792e-04 |
7.9007e-05 |
1.8112e-04 |
|
0.8 |
1.6877e-04 |
9.2497e-05 |
2.0326e-04 |
|
0.9 |
2.0086e-04 |
1.0691e-04 |
2.2771e-04 |
|
1 |
2.3456e-04 |
1.2240e-04 |
2.5473e-04 |
|
t2j Trapezoid |
Error of VK2fda |
Error of VK2cda |
Error of VK2bda |
|
0 |
7.5003e-05 |
5.8333e-09 |
7.4997e-05 |
|
0.1 |
6.1211e-05 |
1.0428e-05 |
8.5480e-05 |
|
0.2 |
4.6312e-05 |
2.0965e-05 |
9.7107e-05 |
|
0.3 |
3.0184e-05 |
3.1713e-05 |
1.1000e-04 |
|
0.4 |
1.2693e-05 |
4.2777e-05 |
1.2429e-04 |
|
0.5 |
6.3098e-06 |
5.4270e-05 |
1.4013e-04 |
|
0.6 |
2.6989e-05 |
6.6306e-05 |
1.5768e-04 |
|
0.7 |
4.9525e-05 |
7.9005e-05 |
1.7712e-04 |
|
0.8 |
7.4118e-05 |
9.2495e-05 |
1.9865e-04 |
|
0.9 |
1.0099e-04 |
1.0691e-04 |
2.2249e-04 |
|
1 |
1.3039e-04 |
1.2240e-04 |
2.4889e-04 |
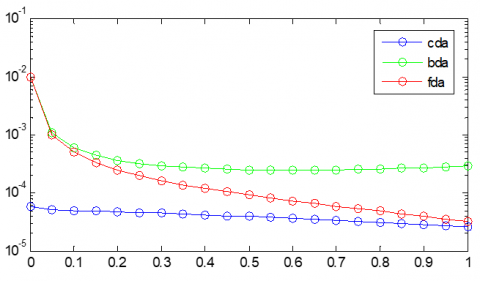
Figure 3. Comparison of resultants to Example 3, for n=20 and $\varepsilon$ = 10-4 by Simpson method
Table 4. Comparison of maximum absolute error of proposed algorithm “cda” for Example 3
|
n |
Trapezoidal Method |
Modified Simpson Method |
Absolute Errors [8] |
|
8 |
7.6466e-04 |
6.4495e-04 |
2.8 e-03 |
|
16 |
1.9124e-04 |
1.7592e-04 |
7.3 e-04 |
|
32 |
4.7807e-05 |
4.5869e-05 |
1.8 e-04 |
|
64 |
1.1945e-05 |
1.1701e-05 |
4.6 e-05 |
|
128 |
2.9787e-06 |
2.9482e-06 |
1.1 e-05 |
|
256 |
7.3719e-07 |
7.3340e-07 |
2.9 e-06 |
|
512 |
1.7681e-07 |
1.7635e-07 |
7.3 e-07 |
As expected, Tables 1-3 and Figures 1-3 demonstrate that the convergence rate of Nyström methods to "cda" approximation equation (if $\varepsilon \rightarrow 0$) is much faster and more accurate than "fda" and "bda". However, the convergence rate of the proposed algorithms is quicker.
Table 4 above displays the maximum absolute errors for various values of n. Furthermore, this final table presents a comparison of the absolute mistakes that are produced by the method that we propose with the one that is described by Inderdeep and Sheo [8] of Example 3.
The proposed approach has smaller absolute errors than the absolute errors presented by Inderdeep and Sheo [8]. This shows that proposed method “cda” is more accurate than the method presented by Inderdeep and Sheo [8] for (ε=10-4).
In this paper, we gave an approach technique that uses Taylor series and Nyström methods for approximating solution of first kind nonlinear Volterra problems, the effectiveness of this above technique was tested by utilizing three distinct examples. It has been observed that all equivalent equations converge and the absolute error is near which was proved that numeric results were accepted for all types of the first kind Volterra-Hammerstein integral equation. Then, the most accurate approximation by Taylor series is the central difference approximation "cda".
In our future project, we will apply the techniques that have been proposed to general equations and systems of all ill-posed problems.
|
VK1 |
Volterra integral equation of the first kind |
|
VK2 |
Volterra integral equation of the second kind |
|
bda |
The backward difference approximation |
|
fda |
The forward difference approximation |
|
cda |
The central difference approximation |
|
AS |
The approximate solutions |
|
Err |
The absolute errors |
[1] Tikhonov, A.N. (1963). On the solution of incorrectly posed problem and the method of regularization. Soviet Math, 4: 1035-1038.
[2] Phillips, D.L. (1962). A technique for the numerical solution of certain integral equations of the second kind. Journal of the ACM, 9(1): 84-97. https://doi.org/10.1145/321105.321114
[3] Kabanikhin, S.I (1995). Numerical analysis of inverse problems. Journal of Inverse and Ill-posed Problems, 3(4): 278-304. https://doi.org/10.1515/jiip.1995.3.4.278
[4] Denisov, A.M. (1975). The approximate solution of a Volterra equation of the first kind. Computational Mathematics and Mathematical Physics, 15(4): 237-239. https://doi.org/10.1016/0041-5553(75)90185-8
[5] Wazwaz, A.M. (2011). Linear and Nonlinear Integral Equations, Methods and Applications. Higher Education Press Springer-Verlag Berlin Heidelberg, London, New York.
[6] Hochstadt, H. (1973). Integral Equations. John Wiley & Sons, Inc. Canada.
[7] Vasin, V.V. (2006). Some tendencies in the Tikhonov regularization of ill-posed problems. Journal of Inverse and Ill-posed Problems, 14(8): 813-840. https://doi.org/10.1515/156939406779768328
[8] Inderdeep, S., Sheo, K. (2016). Haar wavelet method for some nonlinear Volterra integral equations of the first kind. Journal of Computational and Applied Mathematics, 292: 541-552. https://doi.org/10.1016/j.cam.2015.07.022
[9] Magnitskii, N.A. (1975). A method of regularizing Volterra equations of the first kind. USSR Computational Mathematics and Mathematical Physics, 15(5): 221-228. https://doi.org/10.1016/0041-5553(75)90118-4
[10] Janno, J., Wolfersdorf, L.V. (1995). Regularization of a class of nonlinear Volterra equations of a convolution type. Journal of Inverse and Ill-Posed Problems, 3(3): 249-257. https://doi.org/10.1515/jiip.1995.3.3.249
[11] Plato, R. (2017). The regularizing properties of multistep methods for first kind Volterra integral equations with smooth kernels. Computational Methods in Applied Mathematics, 17(1): 139-159. https://doi.org/10.1515/cmam-2016-0029
[12] Guechi, S., Guechi, M. (2021). Taylor approximation for solving linear and nonlinear ill-posed Volterra equations via an iteration method. General Letters in Mathematics, 11(2): 18-25. http://doi.org/10.31559/glm2021.11.2.1
[13] Guechi, S., Guechi, M. (2023). Effective technique for converting ill-posed Volterra equation to integro-differential equation and solving it. Mathematical Modelling of Engineering Problems, 10(2): 458-462. https://doi.org/10.18280/mmep.100210
[14] Linz, P. (1985). Analytical and Numerical Methods for Volterra Equations, SIAM Studies in Applied Mathematics, Philadelphia.
[15] Baker, C.T.H. (2001). A perspective on the numerical treatment of Volterra equations. Journal of Computational and Applied Mathematics, 125(1-2): 217-249. https://doi.org/10.1016/S0377-0427(00)00470-2415-447.
[16] Alber, Y., Ryazantseva, I. (2006). Nonlinear Ill-Posed Problems of Monotone Type. Springer, Netherlands.
[17] Atkinson, K., Han, W, (2004). Elementary Numerical Analysis, John Wiley & Sons, United States.
[18] Karoui, A. (2005). On the existence of continuous solutions of nonlinear integral equations. Applied Mathematics Letters, 18(3): 299-305. https://doi.org/10.1016/j.aml.2004.09.007
[19] Kress R. (2014). Linear Integral Equations. Springer Science and Business Media, New York.
[20] Nadir, M., Rahmoune, A. (2007). Modified method for solving linear Volterra integral equations of second kind using Simpson's rule. International Journal: Mathematical Manuscripts, 1(1): 141-146.