OPEN ACCESS
In view of the growing importance of hydropower generation in grid structure and the limitations of the traditional control rules for hydropower units (e.g. poor control effect and failure to handle large fluctuations), this paper sums up the operation pattern of hydropower unit control systems, and designs an integrated fuzzy variable structure controller for hydropower units that integrates the fuzzy control and variable structure control. Then, the proposed controller was applied to a simulation analysis to obtain the response curves under different state parameters, which reveal that the state parameters stabilized rapidly. This means the proposed controller can effectively prevent buffeting and facilitate hydropower unit control.
hydropower unit control, fuzzy control, variable structure control, buffeting
China has abundant natural water reserves. Thanks to mature technology, low cost and flexible and stable operation, hydropower generation plays a leading role in the national grid power output (Fasol, 1997). Studies have shown that, by the end of 2016, the installed hydropower capacity had been 332,110,000 kilowatts, an increase of 3.9% on a year-on-year basis, showing great prospects for hydropower generation.
The basic component of a hydropower generation system is the hydropower unit, which transforms mechanical energy to electric energy. A hydropower unit consists of various software and hardware (Saad et al., 1996). Its stability and controllability have great impacts on the coordination and efficiency of the whole power generation process; meanwhile, for the hydropower station project owner, how to improve the safety and reliability of power transmission to users is also a measure of the hydropower station’s value (Iokibe et al., 2015). Therefore, it is very important to figure out how to coordinate the relationship between the software and hardware of the hydropower unit so as to keep the whole system in normal operation even when there is any disorder externally or internally and achieve the self-healing maintenance of the system.
Based on this, with hydropower unit as the focus, this paper integrates the control system strategy, theory and operation pattern, establishes a simplified mathematical model for the complex hydropower generation system and optimizes the controller of the control system, in the hope of providing references for the controllability and stability of hydropower unit.
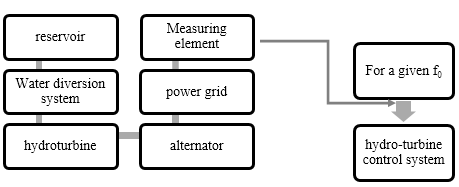
The core of hydropower system control is the hydropower unit governing system, which mainly consists of a water turbine and a generator. The characteristics of the two main components are shown in Table 1 and the power generation process is shown in Fig. 1 (Yu et al., 2014). Hydropower unit governing means that under the instructions of the governing system, the hydropower unit can operate stably and give correct response to ensure the fluctuations in the generation process are dynamic and steady.
Table 1. Hydropower unit components and their characteristics
|
|
Hydroturbine |
Alternator |
|
Effect |
Potential energy is converted into mechanical energy |
Mechanical energy is converted to electricity |
|
System |
Water diversion system |
turbine control system |
Figure 1. Hydropower process diagram
2.1. Mathematical model for the hydropower generation governing system
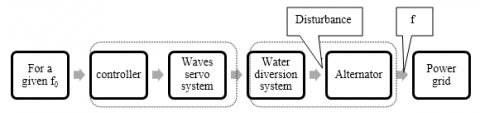
Fig.2 shows that the electro-hydraulic servo system is an important part of the hydropower generation governing system. It itself is a system with random variations. For the sake of convenience, this paper adopts the research results of Huang (Huang, 1998) and obtains the function equation of the system, as shown in Formula 1 below:
Figure 2. Hydro turbine governing system structure
$Y(s)=\frac{U_{s}}{T_{y} T_{y 1} s^{2}+T_{y} s+1}$ (1)
where, $\mathrm{T}_{\mathrm{y}}$—inertia time constant;
$\mathrm{T}_{\mathrm{y1}}$—inertia time constant, which can be regarded as 0 under the AC servo condition;
At this point,
$\mathrm{Y}(\mathrm{s})=\frac{\mathrm{U}_{\mathrm{S}}}{\mathrm{T}_{\mathrm{y}} \mathrm{S}+1}$ (2)
For the water diversion system, this paper adopts the rigid water hammer theory in modeling. The relational expression is shown in Formula 3 below:
$\nabla \mathrm{H}=-\frac{\mathrm{L}}{\mathrm{g}} \frac{\mathrm{d} \mathrm{v}}{\mathrm{dt}}=-\frac{\mathrm{L}}{\mathrm{gA}} \frac{\mathrm{d} \mathrm{Q}}{\mathrm{dt}}$ (3)
where, L—length of the water diversion pipe;
V—water flow velocity;
g—gravitational acceleration;
t—time for which water flows through the pipe;
If it is believed that $\mathrm{T}_{\mathrm{w}}=\frac{\mathrm{LQ}_{\mathrm{r}}}{\mathrm{g} \mathrm{AH}_{\mathrm{r}}}$, then
$\mathrm{h}=-\mathrm{T}_{\mathrm{w}} \frac{\mathrm{d} \mathrm{q}}{\mathrm{dt}}$ (4)
The function of the turbine is to convert hydraulic energy into mechanical energy. For a Francis turbine, linear models can be used to describe the kinetic moment and flow, as shown below:
$\mathrm{m}_{\mathrm{t}}=\frac{\nabla \mathrm{M}_{\mathrm{t}}}{\mathrm{M}_{\mathrm{r}}}=\frac{\partial \frac{\mathrm{M}_{\mathrm{t}}}{\mathrm{M}_{\mathrm{r}}}}{\partial \frac{\alpha}{\alpha_{\mathrm{max}}}} \frac{\Delta \alpha}{\partial_{\mathrm{max}}}+\frac{\partial \frac{\mathrm{M}_{\mathrm{t}}}{\mathrm{M}_{\mathrm{r}}}}{\partial \frac{\mathrm{n}}{\mathrm{n}_{\mathrm{r}}}} \frac{\Delta \mathrm{n}}{\mathrm{n}_{\mathrm{r}}}+\frac{\partial \frac{\mathrm{M}_{\mathrm{t}}}{\mathrm{M}_{\mathrm{r}}}}{\partial \frac{\mathrm{H}_{\mathrm{r}}}{\mathrm{H}_{\mathrm{r}}}} \frac{\Delta \mathrm{H}}{\mathrm{H}_{\mathrm{r}}}=\mathrm{e}_{\mathrm{mx}} \mathrm{y}+\mathrm{e}_{\mathrm{mx}} \mathrm{x}+\mathrm{e}_{\mathrm{mx}} \mathrm{h}$
$\mathrm{q}=\frac{\nabla \mathrm{Q}}{\mathrm{Q}_{\mathrm{R}}}=\frac{\partial \frac{\mathrm{Q}}{\mathrm{Q}_{\mathrm{r}}}}{\partial \frac{\alpha}{\alpha_{\mathrm{max}}}} \frac{\Delta \alpha}{\alpha_{\mathrm{max}}}+\frac{\partial \frac{\mathrm{Q}}{\mathrm{Q}_{\mathrm{r}}}}{\partial \frac{\mathrm{n}}{\mathrm{n}_{\mathrm{r}}}} \frac{\Delta \mathrm{n}}{\mathrm{n}_{\mathrm{r}}}+\frac{\partial \frac{\mathrm{Q}}{\mathrm{Q}_{\mathrm{r}}}}{\partial \frac{\mathrm{H}}{\mathrm{H}_{\mathrm{r}}}} \frac{\Delta \mathrm{H}}{\mathrm{H}_{\mathrm{r}}}=\mathrm{e}_{\mathrm{qy}} \mathrm{y}+\mathrm{e}_{\mathrm{qx}} \mathrm{x}+\mathrm{e}_{\mathrm{qh}} \mathrm{h}$
where, $\mathrm{m}_{\mathrm{t}}$—turbine moment;
q—turbine flow;
y—servomotor stroke change;
x—rotating speed;
h—relative value of waterhead;
$\mathrm{e}_{\mathrm{my}}, \mathrm{e}_{\mathrm{mx}}, \mathrm{e}_{\mathrm{mh}}$—transfer coefficient of turbine moment with respect to servomotor stroke, rotating speed and waterhead; for an ideal water turbine, it can be approximately regarded that $e_{m x}=0$ ;
$\mathrm{e}_{\mathrm{qy}}, \mathrm{e}_{\mathrm{qx}}, \mathrm{e}_{\mathrm{qh}}$—transfer coefficient of turbine speed with respect to servomotor stroke, rotating speed and waterhead; for an ideal water turbine, it can be approximately regarded that $\mathrm{e}_{\mathrm{qx}}=0$;
The main function of the engine is to generate electrical energy. The grid load that it is dealing with is a constantly changing system, so at this time, this paper uses the mechanical rotation with first-order inertia to describe it as follows:
$G_{g}(s)=\frac{x(s)}{m_{t}(s)-m_{g 0}(s)}=\frac{1}{T s+e_{n}}=\frac{1}{\left(T_{a}+T_{b}\right) s+e_{n}}$
where, $T_{a}$—rotational inertia torque of the generator unit;
$T_{b}$—load inertia torque, usually deemed as $T_{b}=(0.24-0.3) T_{a}$ ;
$e_{n}$ —integrated adaptive control coefficient of the water turbine.
So for a whole hydropower unit governing system, the function expressions of various components can be combined to describe it, with x, $m_{t}$ and y as the state parameters $x_{1}, x_{2},$ and $x_{3}$ . The expression of the additional variable $x_{4}$ is as follows:
$x_{4}=\int_{0}^{\infty} x_{1} d t$
The overall expression of the water turbine unit is as follows:
$\dot{X}=A X+B u+F d(t)$
Y=CX
where, $X=\left(\begin{array}{cc}{x} & {m_{t} y x_{4}}\end{array}\right)^{T}, F=\left(\begin{array}{llll}{f_{2}} & {f_{1}} & {0} & {0}\end{array}\right)^{T}$
$A=\left[\begin{array}{cccc}{a_{11}} & {a_{12}} & {0} & {0} \\ {a_{21}} & {a_{22}} & {a_{23}} & {a_{24}} \\ {0} & {0} & {a_{33}} & {a_{34}} \\ {1} & {0} & {0} & {0}\end{array}\right]$
$B=\left(\begin{array}{llll}{0} & {b_{1}} & {b_{2}} & {0}\end{array}\right)^{T}$
$C=\left[\begin{array}{llll}{1} & {0} & {0} & {0} \\ {0} & {0} & {1} & {0}\end{array}\right]$
$a_{11}=\frac{e_{x}-e_{n}}{T_{a}}, a_{12}=\frac{1}{T_{a}}, a_{21}=\frac{\left(e_{q h} e_{x}-e_{q x} h\right)\left(e_{x}-e_{n}\right) e_{x}}{T_{a} e_{q h}}+\frac{e_{x}}{T_{a} e_{q h}}$
$a_{22}=\frac{\left(e_{q h} e_{x}-e_{q x} h\right)}{T_{a} e_{q h}}-\frac{1}{T_{a} e_{q h}}, a_{23}=\frac{\left(e_{q h} e_{h}-e_{q x} e_{y}\right)\left(e_{x}-e_{n}\right) e_{x}}{T_{a} e_{q h}}+\frac{e_{y}}{T_{a} e_{q h}}$
$a_{24}=\frac{\left(e_{q h} e_{h}-e_{q x} e_{y}\right)\left(e_{x}-e_{n}\right) e_{x}}{T_{a} e_{q h}}, a_{34}=a_{43}=\frac{1}{T_{y}}$
$b_{2}=a_{24} ; b_{3}=\frac{1}{T_{y}} ; f_{1}=\frac{1}{T_{a}} ; f_{2}=\frac{\left(e_{q h} e_{x}-e_{q x} e_{h}\right)}{T_{a} e_{q h}} ; d(t)=m_{g 0}$
2.2. Fuzzy control theory
Relying on the fuzzy controller, fuzzy control performs intelligent processing of the fuzzy set algorithm to achieve target expression. A fuzzy control generally consists of four parts (Liu et al., 2005), namely fuzzy quantization, knowledge base, defuzzification and fuzzy reasoning. The characteristics of the four parts and the method for each part are shown in Table 2.
Table 2. Characteristics of the fuzzy controller and the method for each part
|
Classification |
Value |
Methods |
|
Fuzzifer |
input value |
Error: e = r − y) The error rate: ec =de /dt |
|
Knowledge Base |
Required rules: Database and fuzzy control rule base |
1 Premises and conclusion are fuzzy 2 The premise of fuzzy, the conclusion is clear |
|
Fuzzy Reasioning |
Relations and the inference rules |
The synthetic method and parallel method |
|
Defuzzifer |
Restore to precise values |
Large membership degree method, the median method (area of halving method) and weighted average method |
2.3. Variable structure system control theory
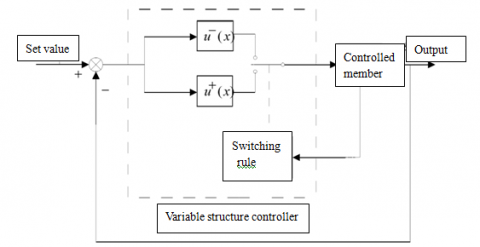
Variable structure control originated from variable structure control system (VSCS), which was proposed by Utekin et al. With the deepening of research and the development of computer technology, the theory has developed into a variable structure system with multiple automatic controls. The schematic is shown in Fig. 3 below. Due to the discontinuities of the variable structure control system, corrections and adjustments are a must in the dynamic process to achieve the target “sliding mode” design and operation and finally meet the control requirements (Wen, 2011). Similar to the relay control in the power industry, sliding mode variable structure control will also encounter buffeting. Based on this, this paper introduces the sliding control signal processing to reduce buffeting. With u as the output, for a second-order system movement,
$\left\{\begin{array}{c}{\dot{\mathrm{x}}=\mathrm{y}} \\ {\dot{\mathrm{y}}=\left(2+\mathrm{f}_{1}\right) \mathrm{y}-\left(1+\mathrm{f}_{2}\right) \mathrm{x}+\mathrm{u}+\mathrm{F}}\end{array}\right.$
where, $\mathrm{f}_{1}, \mathrm{f}_{2}$— perturbations within the system;
F — external interference, which can be a constant, a univariate function or a bivariate function of x and y.
3.1. Variable structure control system design
The schematic diagram of the variable structure system is shown in Fig. 3. It can be seen that the design idea of the variable structure system is staged design (Da, 2015), involving the initial stage and the sliding motion stage. In the first stage, under the variable structure control, the target object reaches the sliding mode, and this stage needs to be expressed with the variable structure control function U(x); the second stage is the steady phase of the sliding mode, which needs to be expressed using the switching function s(x).
Figure 3. Variable structure control system schematic diagram
With linear system as the research object, the design formula of the variable structure control function U(x) (Guo et al. 2015) is as follows:
$\mathrm{U}=-(\mathrm{CB})^{-1}[\mathrm{CAx}+\mathrm{kS}+\varepsilon * \operatorname{sgn}(\mathrm{S})]$
Therefore, we need to find an appropriate matrix C that is close to the sliding motion. This motion is reversible, fast and effective. When the controlled object is simplified, the expressions are as follows:
$\begin{aligned} \dot{\mathrm{x}}_{1} &=\mathrm{A}_{11} \mathrm{x}_{1}+\mathrm{A}_{12} \mathrm{x}_{2} \\ \mathrm{x}_{2}=& \mathrm{A}_{21} \mathrm{x}_{1}+\mathrm{A}_{22} \mathrm{x}_{2}+\mathrm{B}_{2} \mathrm{u} \\ \mathrm{S}=& \mathrm{C}_{1} \mathrm{x}_{1}+\mathrm{C}_{2} \mathrm{x}_{2} \end{aligned}$
When the controlled object reaches the sliding mode, S=0,
$\begin{aligned} \dot{\mathrm{x}}_{1}=& \mathrm{A}_{11} \mathrm{x}_{1}+\mathrm{A}_{12} \mathrm{x}_{2} \\ \mathrm{x}_{2} &=-\mathrm{Kx}_{1} \\ \mathrm{K} &=\mathrm{C}_{2}^{-1} \mathrm{C}_{1} \end{aligned}$
Then, the sliding mode parameter matrix is expressed as $C=\left(C_{1} C_{2}\right)=\left(\mathrm{KC}_{2} \mathrm{C}_{2}\right)=\left(\mathrm{K} \quad \mathrm{C}_{2}\right)$ T.
3.2. Fuzzy variable structure controller design
As can be seen from Section 2.2, the variable structure control system takes the deviation and deviation rate as input parameters, and then achieves control through the reasoning design rules for the parameters. Thus, choosing reasonable input parameters is very essential (He et al., 2014; Mahoney et al., 2002). This paper takes the error of the switching function and its rate of change as the input parameters and the variance as the output, and then determines the sliding mode control quantity.
1. Assign fuzzy set parameters:
PB=positive big, PM=positive medium, PS=positive small, ZR=0
NS=negative small, NM=negative medium, NB=negative big
2. Input and output
$\begin{aligned} \mathrm{S} &=\{\mathrm{NB}, \mathrm{ZR}, \mathrm{PB}\} \\ \dot{\mathrm{S}} &=\{\mathrm{NB}, \mathrm{ZR}, \mathrm{PB}\} \\ \mathrm{f}(\mathrm{s}) &=\{\mathrm{NB}, \mathrm{ZR}, \mathrm{PB}\} \end{aligned}$
3. Trial and confirmation of control rules
Table 3. Fuzzy rules
|
|
NB |
ZR |
PB |
|
NB |
NB |
NB |
ZR |
|
ZR |
NB |
ZR ZR |
ZR |
|
PB |
ZR |
ZR |
PB |
4. Defuzzification
Figure 4. A fuzzy variable structure controller structure
This paper uses a 3-section fuzzy structure controller design model to simulate and analyze the hydropower unit under different working conditions (Meng et al., 2010). The operating parameters of the hydropower station S are listed in Table 4. The inertia constant $\mathrm{T}_{\mathrm{w}}=1.1 \mathrm{s}$, and the inertia time constant of the unit $\mathrm{T}_{\mathrm{y}}$ =0.65s.
Table 4. Parameter table
|
Working condition |
$e_{x}$ |
$e_{y}$ |
$e_{h}$ |
$e_{qx}$ |
$e_{qy}$ |
$e_{qh}$ |
$e_{n}$ |
|
one |
-1 |
1 |
1.2 |
0 |
1.2 |
0.5 |
0.3 |
|
two |
-0.89 |
0.82 |
1.45 |
0 |
0.8 |
0.4 |
0.2 |
Substitute them into the formula and then we have the following matrix expressions of A, B and F:
$A=\left[\begin{array}{cccc}{-0.2} & {0.15} & {0} & {0} \\ {-2.2} & {-1.5} & {5.82} & {4} \\ {0} & {0} & {-2} & {-2} \\ {1} & {0} & {0} & {0}\end{array}\right]$
$B=\left(0 b-4_{1} 20\right)^{T}$
$F=(-0.15-0.1500)^{T}$
The overall expression of the hydropower unit is as follows (assuming there is no disturbance):
$\dot{X}=A X+B u$
according to the characteristics of the matrix, when the matrix rank is n, i.e. when
rank(B AB … An-1 B)=n=rank $\left[\begin{array}{cccc}{0} & {0.5} & {-8.2} \\ {-4} & {16} & {115} \\ {2} & {-4} & {7} & {-14} \\ {0} & {0} & {-0.5} & {3.6}\end{array}\right]$
4.1. Variable structure control simulation
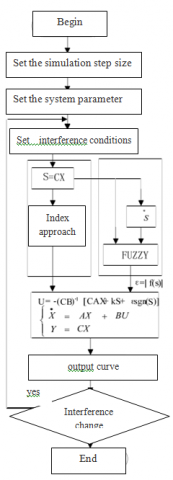
The flow chart of variable structure control is shown below:
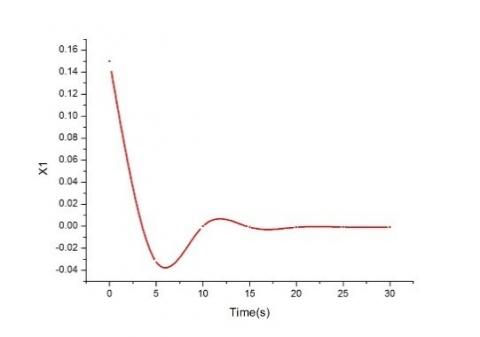
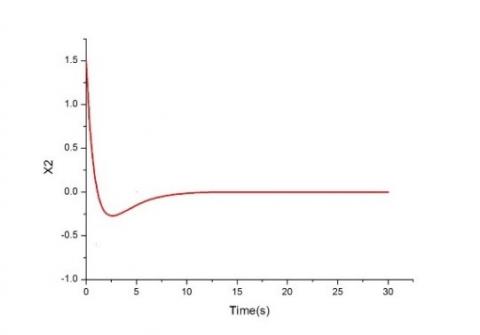
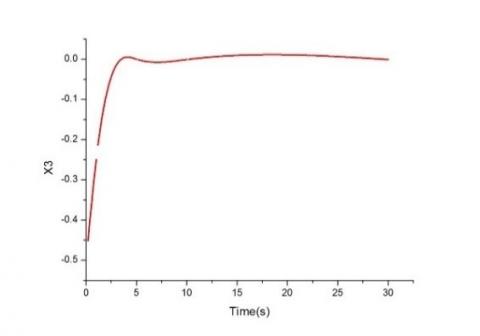
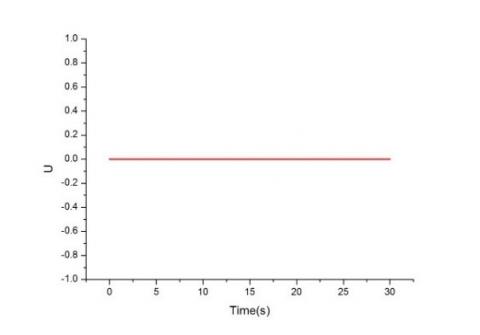
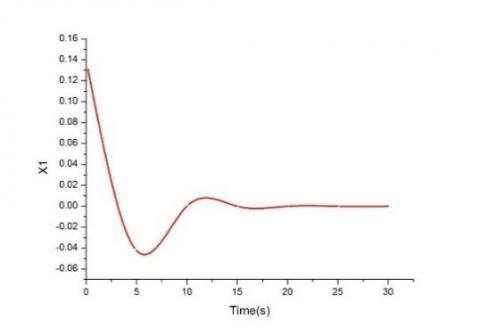
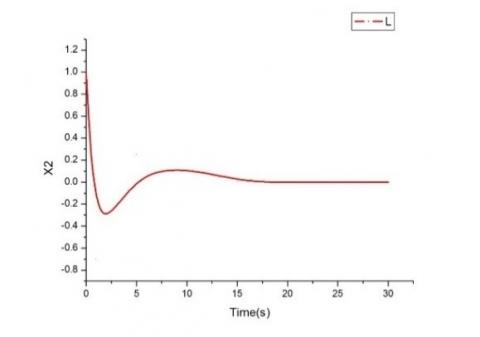
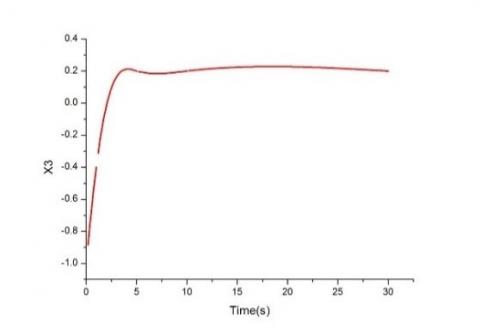
According to the above calculated parameters, the exponential approximation law is selected. After several simulation tests, the results are shown in Figure 4.3. As can be seen, when K=100 and ε=0.6, it takes a very short time for different states to become stable, and the simulation results are good. Here x1 stands for relative speed deviation, x2 relative deviation of torque, x3 stroke change value and U the controller output.
Figure 5. Program flow chart
On the basis of the above variable structure control, this paper introduces the fuzzy control theory. The fuzzy rule is used to smooth the variable structure control signals and obtain the controller output variation diagram. It can be seen that buffeting can be avoided to some extent. On the basis of the above conditions, a certain disturbance is added in the simulation experiment and the results are shown in the following figure.
Figure 6. Response of state variables under no-load disturbance
Figure 7. Response of state variables under 20% load disturbance
Through comparison of the above two figures, it can be found that, under the same conditions, with no load or with load disturbance, each variable can become stable within a short time. Therefore, fuzzy variable structure control can adjust the load disturbance to the control system and reduce buffeting to some extent. Based on working condition 2, additional load (20%) is added. And through simulation and analysis, it can be found that buffeting cannot be controlled, and that the torque and the servomotor stroke have great impacts on the results, which is not conducive to variable structure system control.
This paper analyzes and summarizes the current researches on hydropower unit system, and based on this, proposes integrating the fuzzy control and variable structure control theories to complement each other’s advantages so as to better control the hydropower unit governing system. The main conclusions are as follows:
(1). This paper analyzes the fuzzy control theory and variable structure control theories, and proposes a hydropower unit governing system control method that integrates the two theories, establishes function equations for all components of the hydropower unit and designs and analyzes this integrated control system.
(2). A hydropower unit governing system generally consists of an electro-hydraulic servo system, a water diversion system, a water turbine and a generator. This paper establishes a mathematical model for the software and hardware of the governing system and deduces the parameters of the model.
(3). This paper uses the fuzzy variable structure controller to carry out simulation analysis and obtains the response curves under different state parameters. The simulation curves show that, under this hydropower unit control rule, it takes a very short time for all state parameters to stabilize, which can facilitate hydropower unit control.
Da C. L. T. (2015). Categorization of the trophic status of a hydroelectric power plant reservoir in the brazilian amazon by statistical analyses and fuzzy approaches. Science of the Total Environment, Vol. 506–507, pp. 613-620. https://doi.org/10.1016/j.scitotenv.2014.11.032
Fasol K. H. (1997). Stabilization and re-engineering of a hydro-electric power plant — a case study. Control Engineering Practice, Vol. 5, No. 1, pp. 109-115.
Guo W., Yang J., Yang W., Chen J., Teng Y. (2015). Regulation quality for frequency response of turbine regulating system of isolated hydroelectric power plant with surge tank. International Journal of Electrical Power & Energy Systems, Vol. 73, pp. 528-538. https://doi.org/10.1016/j.ijepes.2015.05.043
He Y., Xu Q., Yang S., Han A., Yang L. (2014). A novel chaotic differential evolution algorithm for short-term cascaded hydroelectric system scheduling. International Journal of Electrical Power & Energy Systems, Vol. 61, pp. 455-462. https://doi.org/10.1016/j.ijepes.2014.03.070
Huang S. J. (1998). Hydroelectric generation scheduling—an application of genetic-embedded fuzzy system approach. Electric Power Systems Research, Vol. 48, No. 1, pp. 65-72. https://doi.org/10.1016/S0378-7796(98)00091-1
Iokibe T., Yonezawa Y., Taniguchi M. (2015). Short‐term prediction of water flow data into hydroelectric power stations using local fuzzy reconstruction method. Electrical Engineering in Japan, Vol. 130, No. 4, pp. 99-106. https://doi.org/10.1541/ieejias.118.329
Liu D., Yi J., Zhao D., Wang W. (2005). Adaptive sliding mode fuzzy control for a two-dimensional overhead crane. Mechatronics, Vol. 15, No. 5, pp. 505-522. https://doi.org/10.1016/j.mechatronics.2004.11.004
Mahoney S. P., Schaefer J. A. (2002). Hydroelectric development and the disruption of migration in caribou. Biological Conservation, Vol. 107, No. 2, pp. 147-153. 10.1016/s0006-3207(02)00052-6
Meng B., Feng X. B., Chen C. X., Qiu G. L., Sommar J., Guo Y.N., Liang P., Wan Q. (2010). Influence of eutrophication on the distribution of total mercury and methylmercury in hydroelectric reservoirs. Journal of Environmental Quality, Vol. 39, No. 5, pp. 1624-1635. https://doi.org/10.2134/jeq2009.0440
Saad M., Bigras P., Turgeon A., Duquette R. (1996). Fuzzy learning decomposition for the scheduling of hydroelectric power systems. Water Resources Research, Vol. 32, No. 1, pp. 179–186. https://doi.org/10.1029/95WR02971
Liu W. J. (2011). Design of decentralised variable structure observer for mismatched nonlinear uncertain large-scale systems. International Journal of Systems Science, Vol. 42, No. 3, pp. 349-357. https://doi.org/10.1080/00207720903513343
Yu P. S., Yang T. C., Kuo C. M., Chou J. C., Tseng H. W. (2014). Climate change impacts on reservoir inflows and subsequent hydroelectric power generation for cascaded hydropower plants. Hydrological Sciences Journal, Vol. 59, No. 6, pp. 1196-1212. https://doi.org/10.1080/02626667.2014.912035