Bayu Adhi Prakosa*![]() | Ritzkal
| Ritzkal![]() | Damara Tri Fazriansyah
| Damara Tri Fazriansyah![]() | Andik Eko Kristus Pamuko
| Andik Eko Kristus Pamuko![]() | Jani Kusanti
| Jani Kusanti![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The Internet of Things (IoT)-based waste bin monitoring system is an innovative solution in managing and monitoring waste efficiently. This research aims to develop a Codular- based bin monitoring application that can monitor organic and non-organic waste data in real-time. The system uses HC-SR04 ultrasonic sensor to measure the height of the waste pile with an accuracy range of ±2 cm and a response time of less than 1 second. A loadcell sensor is used to detect the weight of the waste with an accuracy of ±0.1 kg. The data collected by the sensors is transmitted to the application through the ESP8266 WiFi module, ensuring the reliability of the system in providing information in a timely manner. The app displays data on the height and weight of waste, both organic and non-organic, and provides notifications when the maximum capacity is reached. With this implementation, waste management can be more effective, encourage community participation in keeping the environment clean, and reduce the negative impact of waste on the environment.
monitoring, trash bin, ESP8266, IoT, real-time monitoring, waste management
The behavior of not throwing garbage in its place is caused by the location of the trash can far from the location of the community, and worrying about dirty hands when opening the lid of the trash can so that people find it difficult to throw garbage in its place which causes garbage to be scattered. The waste problem is one of the biggest environmental challenges faced globally [1, 2]. Plastic waste that is difficult to decompose and industrial waste that pollutes the environment are some types of waste that are difficult to manage. One innovative solution is an IoT-based waste monitoring system, which enables real-time waste management and monitoring, making it more efficient and effective. In an effort to reduce its negative impact, it is important for people to adopt an environmentally friendly lifestyle, such as recycling, reducing the use of single-use plastics, and participating in sustainable waste management programs [3]. With awareness and cooperation, together we can realize a clean and healthy environment for future generations [4, 5].
Waste is a serious threat to the sustainability of the economy, society, and the environment. So far, many people are lazy to dispose of garbage because of the laziness that arises when disposing of garbage must open the lid of a dirty trash can [6]. Poor waste management can cause detrimental environmental problems, considering that the trash bins that have been provided by the cleaning agency are only a silent decoration on the streets that are not maintained and unattractive. This is also due to the fact that the current trash cans still use a simple method, namely when you want to throw away the garbage, you still use the manual method by opening the trash can lid first, so to anticipate this, a trash can design is carried out that can increase the attractiveness of the community to dispose of garbage in its place [7, 8]. The achievement data below is the result of inputting data from 197 districts/cities throughout Indonesia in 2023, namely waste generation 23,375,260.34 tons, waste reduction 3,833,561.18 tons (16.4%), waste handling 11,780,464.27 tons (50.4%); managed waste 15,614,025.45 tons (66.8%), unmanaged waste 7,761,234.89 tons (33.2%). This data was taken on January 6, 2024 [9], in Figure 1.
Figure 1. Trash data
Android information system is the development of applications that are specifically designed to provide certain information or facilitate certain processes in an information system [10]. Many applications are specifically designed for use on Android devices. This can include applications for monitoring trash bins, this kind of application is designed to take advantage of the features of Android devices and provide mobile-based solutions [11]. The trash bin monitoring application is a technology solution that provides convenience in managing the waste collection and monitoring system. By using a Codular, this application allows users to monitor bins in real time [12]. Using a cell phone, cleaners or related parties can monitor directly when the trash can reach its maximum capacity [13]. The existence of a bin monitoring application, waste management as more effective and efficient, allows cost reduction and reduces the potential for excess waste that can pollute the environment [14]. This application also plays a role in encouraging community participation in maintaining cleanliness and managing waste more responsibly, thus creating a cleaner environment [15, 16].
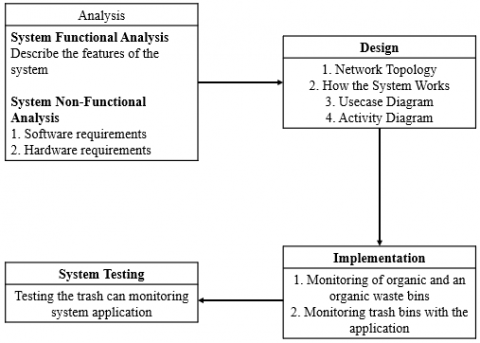
In this research, it is prepared to serve as a reference, concept and implementation in research, thus the framework is as follows in Figure 2:
Figure 2. Research methods
2.1 Analysis
At this stage, the analysis process includes analyzing system requirements, analyzing the architecture of the organic and non-organic waste bin monitoring system:
1. System functional analysis.
2. Non-functional system analysis.
2.2 Design
Design is a process that involves planning, conceptualizing, and creating solutions that can meet certain needs or goals, usually design is related to creating something that has good function, aesthetics, and user experience [17]. The term design in this study is divided into five types, namely:
1. Network topology design.
2. Design of how the system works.
3. Usecase diagram design.
4. Activity diagram design.
2.3 Implementation
Application is an activity or an action of a plan that is made in detail to achieve a goal, the application begins to be carried Android devices. This can include applications for monitoring trash bins, this kind of application is designed to out when all planning is considered perfect, explaining the application of a trash can monitoring system application [18].
2.4 Testing
Testing is the process of evaluating software or systems to determine whether the system is functioning correctly according to the requirements or specifications set, the goal is to find errors in the software or system and ensure that they are corrected before the final product is published. At this stage, testing the height and weight of a trash can monitoring system application is carried out [19].
The results of this research entitled organic and non-organic waste monitoring system with Codular, this stage will discuss the results of the research that has been done.
1. The application can have an interface that allows users to monitor the amount and type of waste collected.
2. The application can display the results of the height and weight of organic and non-organic waste.
3. HC-SR04 Ultrasonic Sensor as input and able to read the height of the garbage will send data to the application.
4. Loadcell sensor as a means of weighing the weight of the garbage, then it will send data to the trash can monitoring application.
5. In the application there is a menu of organic and inorganic waste data, when the garbage has reached the maximum limit.
3.1 Analysis
In the analysis stage, the process of analyzing system requirements will be carried out including analyzing the needs and workings of the system.
3.1.1 System functional analysis
The application built is expected that the admin can log in, manage organic and non-organic data, monitor waste data thoroughly which is explained as follows.
1. Login. Login is a function that allows admins and members to log into the system. Admins and members login to the application by entering their id and password on the login page.
2. Monitoring of trash bins. Monitoring trash cans serves to view trash can data such as trash height and trash weight in real time.
3. Manage organic data. Useful for managing organic data and viewing previous waste data.
View organic data: This function allows the admin to view data that has been detected.
Select a date: This function allows the admin to select the date of the previous trash data to view.
4. Manage non-organic data. Useful for managing non-organic data and viewing previous waste data.
View non-organic data: This function allows the admin to view data that has been detected.
Select a date: This function allows the admin to select the date of the previous trash data to view.
Logout function: This function allows the admin to log out and end the session in the system.
3.1.2 Non-functional system analysis
System requirements analysis includes system requirements, as for the hardware (Hardware, shown in Table 1) and software (Software, shown in Table 2) requirements needed by the system:
Table 1. Hardware
|
No. |
Device Name |
Function |
Amount |
|
1 |
Servo |
It is a device or motor rotary actuator designed with a closed loop feedback control system, so as to ensure and determine the angular position of the motor output shaft [20]. |
2 Units |
|
2 |
Load Cell |
loadcell in measuring the height and weight of waste. Testing begins with sensor calibration using standard measuring instruments. The HC-SR04 was tested by measuring the height of objects in the range of 2-450 cm and compared with the results from a laser meter, while the loadcell was tested by weighing up to 10 kg and comparing it with a high-precision digital scale [21]. |
1 Units |
|
3 |
Ultrasonic ranging module HCSR04 |
A device used to measure the distance of an object. The range of distances that can be measured is about 2-450 cm. This device uses two digital pins to communicate the distance read [22]. |
1 Units |
|
4 |
ESP8266 |
Reliability, measurement frequency, and latency were used to assess the real-time monitoring capacity. On steady networks, the system latency is between 0.5 and 1 second; on poor signals, it can reach 3 seconds. The system can monitor in real time since it reads data every two seconds. Reliability testing indicated the system continued to perform effectively at high temperatures (40°C) and high humidity (>80%), while the precision of HC- SR04 reduced to ±5 cm at severe temperatures [23]. |
1 Units |
|
5 |
Proximity Sensors |
A tool or device that can detect changes in distance on an object. However, the process occurs without physical contact [24]. |
1 Units |
Table 2. Software
|
No. |
Software Name |
Function |
|
1 |
Aruino IDE |
Software used to create programming source code or in other words Arduino IDE as a medium for programming on the board that you want to program [25]. |
|
2 |
Visio |
A computer software typically used to create diagrams, flow charts, and network schematics. Besides Word, Excel and PowerPoint, Microsoft Visio is also included in the Microsoft Office package. This software uses vector graphics to create its diagrams [26]. |
|
3 |
Codular |
Web to create android applications with the concept of drag-drop block programming [27]. |
3.2 Design
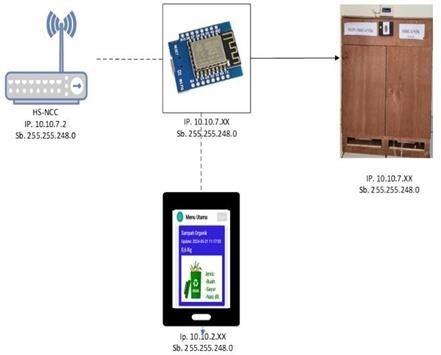
At this stage, the network topology design related to the research is carried out, there is hardware to support the application of organic and non-organic waste monitoring system research with Codular can be seen in Figure 3.
3.2.1 Network topology design
From Figure 3, the network topology of the IoT-based waste monitoring system is designed to support communication between components in monitoring and managing waste efficiently. The system starts from an internet source connected to the HS-NCC access point, which emits WiFi signals to connect monitoring devices. The main device used is the ESP8266 module, which receives signals from the access point and serves as the main data sender to the monitoring application. The HC-SR04 sensor is used to detect the height of the waste, while the loadcell measures the weight of the waste. The data from these two sensors is sent to the microcontroller for processing. The microcontroller then forwards the data to the ESP8266 module to be sent to the monitoring application in real-time.
In addition, the microcontroller also controls the trash can lid actuator, which opens the lid based on the type of waste detected, whether organic or non-organic. The data received by the monitoring application includes the height, weight, and type of trash, which are displayed in the application interface to make it easier for users to monitor the condition of the trash cans. The system is designed to work consistently with unique IP addressing (10.10.xx.xx) and subnet mask 255.255.248.0 to ensure organized communication. This topology enables efficient integration between physical and software components, providing a reliable and real-time garbage monitoring solution.
Figure 3. Network topology
3.2.2 How the system works
Figure 4 explains how the trash can system works from the research of organic and non-organic waste monitoring systems with codes. First attach organic waste such as bottles, plastics and cans to the proximity sensor, inductive proximity and water level simultaneously, then the proximity sensor, inductive proximity and water level will process the type of waste detected. When the waste has been detected by the proximity sensor, then the lid of the organic waste bin will open. When attaching fruit, vegetable peels and food waste to the proximity, inductive proximity and water level sensors simultaneously, then the proximity, inductive proximity and water level sensors will process the type of waste detected. When the trash can is filled, the ultrasonic sensor will detect the height of the garbage pile. Loadcell sensor to weigh the weight of the garbage, then it will send the garbage height data and the garbage weight data will send it to the Android application via the internet network captured by the ESP8266 WiFi module [28].
Figure 4. How the system works
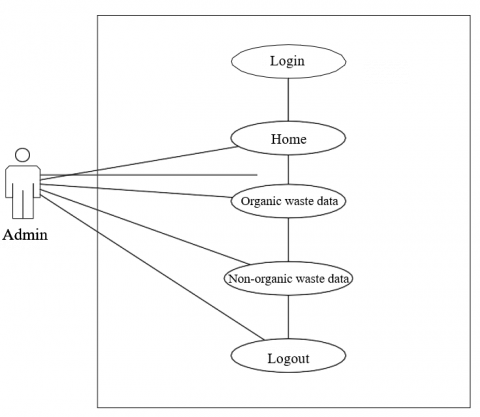
3.2.3 Use case
Use case diagrams are used to describe the interaction between actors and the system.
Figure 5. Use case
In Figure 5, Use case diagram explains that the admin's job is to monitor the weight and height data of organic and non- organic waste when the garbage is full, the admin also logs in to the organic and inorganic waste monitoring system application. Admins can monitor organic and inorganic waste data reports in real time [29].
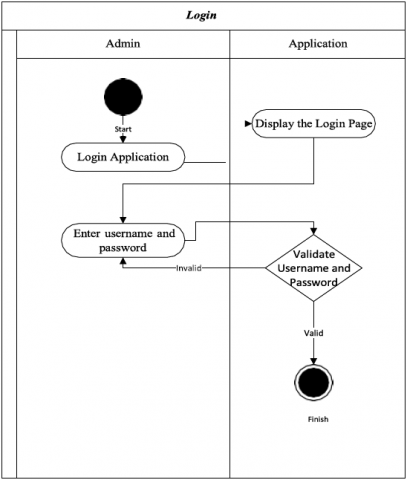
3.2.4 Activity diagram
Activity diagrams are used to describe the activities that occur in the application between actors and the system.
a. Login activity diagram
In Figure 6, this section the admin logs into the application. The following is an activity diagram that shows the steps taken by the admin when logging in. The first step is for the admin to enter the trash can monitoring system application, then input the username and password, after success then enter the main menu of monitoring the trash can.
Figure 6. Diagram activity login
b. Diagram activity home
In Figure 7, after successfully logging in the admin enters the main menu of monitoring the trash can, then the admin can monitor the height and weight of organic and non-organic waste in real time.
Figure 7. Diagram activity home
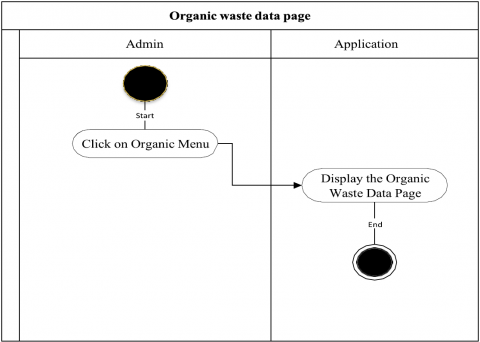
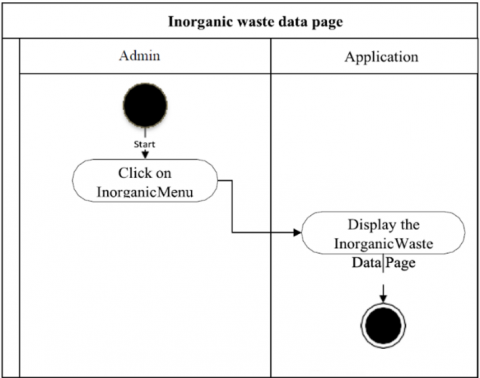
c. Activity diagram of organic waste monitoring
In Figure 8 and Figure 9, after successfully logging in the admin selects the organic menu for monitoring the trash can, then the admin can monitor the weight of organic and non-organic waste when it reaches the maximum limit.
Figure 8. Diagram activity monitoring sample organic
Figure 9. Activity diagram of monitoring non-organic waste
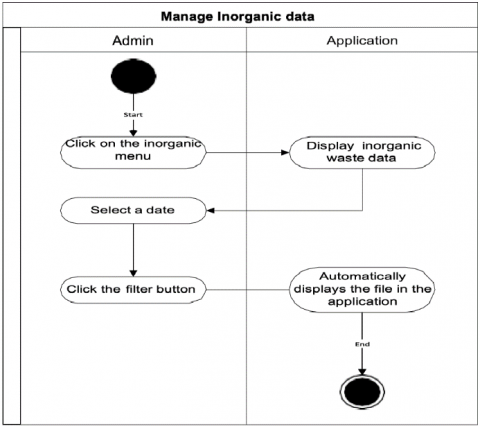
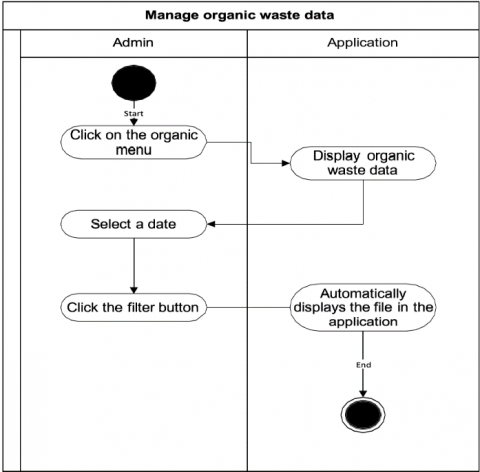
d. Activity diagram of managing non-organic waste data
In Figure 10 and Figure 11, the admin can see the garbage data when the garbage has started to reach the maximum limit, the admin can also select the date select menu when the admin wants to know the previous data.
Figure 10. Activity diagram of managing inorganic waste
Figure 11. Activity diagram of managing organic waste data report
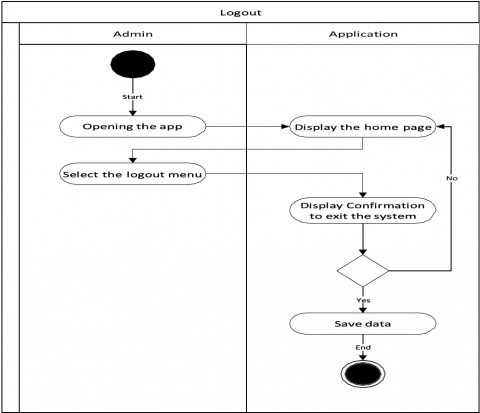
e. Diagram activity logout
In Figure 12, after the admin has finished monitoring the trash can, then the admin exits the application in the trash can monitoring system application menu, then selects the logout feature [30].
Figure 12. Logout activity diagram
3.3 Implementation
The application of the bin monitoring system involves programming, hardware and software integration, and testing to ensure the system works as intended. Programming is done using the Arduino IDE to manage microcontroller functions, such as data processing from the HC-SR04 ultrasonic sensor and loadcell, as well as data communication through the ESP8266 module. Codular was used to develop an Android-based application interface, which allows users to monitor waste data in real-time. The main challenge in system integration is ensuring compatibility between various hardware, such as sensors, microcontrollers, and communication modules, especially in terms of data format and connection stability.
Another difficulty is to ensure synchronization between sensor data readings and information transmission to the application without significant latency, especially under unstable WiFi network conditions. To overcome these challenges, optimization of the program code was carried out by using lightweight communication protocols such as MQTT, which is more efficient in transmitting data than HTTP. In addition, extensive testing was conducted under various environmental conditions to ensure the system remained reliable, even in high temperatures or extreme humidity. With this approach, technical constraints can be minimized, and the system can function effectively to support more efficient waste management.
3.4 Testing
The testing protocol of the waste monitoring system involved calibration and validation to ensure data accuracy and reliability. The HC-SR04 sensor was tested with a laser meter over a range of 2-450 cm, while the loadcell was compared with a digital scale up to 10 kg, recording deviations of ±2 cm and ±0.1 kg respectively. Validation was performed with statistical analysis to calculate the average deviation and measurement uncertainty. Tests also included extreme environmental conditions, such as 40°C and >80% humidity, to ensure the system continued to function consistently. Data was compared to the standards of certified calibration tools to ensure the reliability of the measurement results:
a. Function testing of inductive proximity sensor
Figure 13 explains the function to detect the presence of an object of non-organic waste, when the garbage has been detected, the trash can lid will open according to the detected garbage.
Figure 13. Sensor proximity
b. Proximity sensor function testing
Figure 14 explains the function of the sensor to detect the presence of an object of non-organic waste. when the garbage has been detected, the trash can lid will open according to the detected garbage.
Figure 14. Inductive proximity
c. Water level function testing
The water level sensor functions to detect wet organic waste.
Figure 15 explains the function of the water level sensor to detect wet organic waste, when it is detected, the trash can lid will open according to the detected waste.
Figure 15. Water level
d. Servo function testing
This stage is carried out to test the servo function to open the trash can lid.
After the sensor detects garbage, the trash can lid will open automatically using a servo, as shown in Figure 16.
Figure 16. Servo
e. ESP8266 testing
At this stage is done to test ESP8266.
In Figure 17, test ESP8266 to determine whether ESP8266 is connected to the internet so that it can send information about the weight and height of the garbage.
Figure 17. ESP8266
f. Weight testing of garbage in the application
At this stage, loadcell sensor testing is carried out and then provides information on the organic and non-organic waste bin monitoring application.
In Figure 18, after the loadcell sensor reads the load on the trash can, then Esp2866 sends information via an internet connection that is already connected. Then it will be detected in the trash can monitoring application in real time.
Figure 18. Weight in app
g. Garbage height testing on the app
At this stage, the ultrasonic sensor tests the height and then sends information to the trash can monitoring application.
In Figure 19, after the ultrasonic sensor reads the height of the garbage, then ESP8266 sends information via an internet connection that is already connected. Then the data will be detected in the trash can monitoring application in real time.
Figure 19. Garbage height in the app
h. Waste data in the application
In addition to monitoring, in the application there is a data monitoring menu that was previously.
In Figure 20, it explains that in addition to being able to see waste data in real time in the application, the application displays data on the previous day so that officers can monitor the day before.
Figure 20. Garbage data in the app
The test results show that the monitoring system using the HC-SR04 ultrasonic sensor and loadcell has stable performance, but does not yet have comprehensive quantitative validation. Sensor calibration was performed to measure the accuracy and uncertainty levels. The HC-SR04 sensor has a measurement range of 2-450 cm with an uncertainty of ±2 cm, showing an average deviation of 1.8 cm at distances greater than 200 cm. Meanwhile, the loadcell was able to measure loads up to 10 kg with an uncertainty of ±0.1 kg, but the largest deviation was recorded at loads over 8 kg with an average error of 0.15 kg. Compared to similar fuzzy logic-based systems, this system has a competitive reliability rate, but requires further optimization to improve the measurement precision.
Real-time monitoring capabilities were tested based on latency, measurement frequency, and system reliability. The delay time between sensor data reading and display in the app ranges from 0.5-1 second under stable network conditions but can increase up to 3 seconds on weak WiFi signals. The system consistently takes data readings every 2 seconds, which is sufficient to monitor changes in waste conditions in real-time. Reliability tests show that the system continues to function well under extreme environmental conditions, such as high temperature (40°C) and high humidity (>80%), although the accuracy of the HC-SR04 sensor decreases to ±5 cm at these extreme temperatures.
Comparatively, the system is simpler in implementation thanks to the use of Codular as the interface platform, making it suitable for small- to medium-scale applications. On the robustness aspect, the reliability of the hardware under various operating conditions gives it an edge, although the quantitative validation of the measurements still needs to be improved to meet higher scientific standards. Recommendations for improvement include sensor validation with more precise calibration tools, increasing the frequency of data readings to improve real-time response, and developing data processing algorithms to handle anomalies that occur under extreme conditions.
[1] Yohanes Bowo Widodo, Y.B.W., Tata Sutabri, T.S., Leo Faturahman, L.F. (2019). Tempat sampah pintar dengan notifikasi berbasis IoT. Jurnal Teknologi Informatika Dan Komputer, 5(2): 50-57. http://doi.org/10.37012/jtik.v5i2.175
[2] Putra, W.T. (2020). Pemberdayaan masyarakat melalui pengelolaan sampah di bank sampah. Jambura Journal of Community Empowerment, 1(2): 69-78. http://doi.org/10.37411/jjce.v1i2.569
[3] Kovaçi, I., Tahiri, A., Dreshaj, A., Millaku, B., Kurtaj-Bajrami, B., Sabedini, H. (2023). Waste management as a measure to achieve sustainable development in Kosovo. International Journal of Sustainable Development and Planning, 18(12): 3965-3971. https://doi.org/10.18280/ijsdp.181227
[4] Wardhana, W.S., Tolle, H., Kharisma, A.P. (2019). Pengembangan aplikasi mobile transaksi bank sampah online berbasis Android (Studi kasus: Bank Sampah Malang). Jurnal Pengembangan Teknologi Informasi Dan Ilmu Komputer, 3(7): 6548-6555.
[5] Septiani, B.A., Arianie, D.M., Risman, V.F.A.A., Handayani, W., Kawuryan, I.S.S. (2019). Pengelolaan sampah plastik di Salatiga: Praktik dan tantangan. Jurnal Ilmu Lingkungan, 17(1): 90-99. http://doi.org/10.14710/jil.17.1.90-99
[6] Solihati, T.I., Nuraida, I., Hidayanti, N. (2020). Pemanfaatan kardus menjadi tempat sampah pintar berbasis arduino UNO R3: Model pengembangan watterfall. ABDIMAS: Jurnal Pengabdian Masyarakat, 3(2): 342-350. https://doi.org/10.35568/abdimas.v3i2.962
[7] Moni, M., Magayiyana, Z., Mngeni, A. (2024). Situation analysis of municipal solid waste management practices in Mthatha Central Business District, South Africa. Environmental and Earth Sciences Research Journal, 11(4): 84-92. https://doi.org/10.18280/eesrj.110401.
[8] Rahman, A.Y., Setiawan, F.W., Hananto, A.L. (2020). Aplikasi teknologi tepat guna untuk umkm pengolahan sampah organik sebagai pakan cacing. Panrita Abdi-Jurnal Pengabdian pada Masyarakat, 4(2): 205-215. https://doi.org/10.20956/pa.v4i2.7340
[9] Ritzkal, Muljono, Santoso, H.A., Hasibuan, Z.A. (2023). Theoretical framework review of plastic waste management. Journal of Namibian Studies: History Politics Culture, 34(S2): 1774-1788.
[10] Ismail, M., Abdullah, R.K., Abdussamad, S. (2021). Tempat sampah pintar berbasis Internet of Things (IoT) dengan sistem teknologi informasi. Jambura Journal of Electrical and Electronics Engineering, 3(1): 7-12. https://doi.org/10.37905/jjeee.v3i1.8099
[11] Jumardi, R. (2018). Purwarupa aplikasi mobile monitoring laporan pengaduan sampah. Jurnal Rekayasa Teknologi Informasi, 2(2): 115-124. http://doi.org/10.30872/jurti.v2i2.1721
[12] Ma'arif, R.A., Fauziah, F., Hayati, N. (2019). Sistem monitoring tempat sampah pintar secara real-time menggunakan metode fuzzy logic berbasis IoT. Jurnal Infomedia: Teknik Informatika, Multimedia, Dan Jaringan, 4(2): 69-74. http://doi.org/10.30811/jim.v4i2.1571
[13] Setyaningsih, W., Hadiyanto, H., Putranto, T.T. (2022). Improvement of waste management through community awareness of plastic controlling in Garang watershed, Semarang City, Indonesia. International Journal of Sustainable Development and Planning, 17(2): 531-538. https://doi.org/10.18280/ijsdp.170218
[14] Citra, D., Hadi, I., Sarjana, S. (2020). Platform web sebagai penampil data monitoring kotak sampah berbasis IOT. Jurnal Informatika dan Rekayasa Elektronik, 3(2): 162-175.
[15] Chaerul, M., Zatadini, S.U. (2020). Perilaku membuang sampah makanan dan pengelolaan sampah makanan di berbagai negara: Review. Jurnal Ilmu Lingkungan, 18(3): 455-466. http://doi.org/10.14710/jil.18.3.455-466
[16] Satya, T.P., Al Fauzan, M.R., Admoko, E.M.D. (2019). Sensor ultrasonik HCSR04 berbasis arduino due untuk sistem monitoring ketinggian. Jurnal Fisika Dan Aplikasinya, 15(2): 36-39. http://doi.org/10.12962/j24604682.v15i2.4393
[17] Wafi, A., Setyawan, H., Ariyani, S. (2020). Prototipe sistem smart trash berbasis IoT (Internet of Things) dengan aplikasi android. Jurnal Teknik Elektro Dan Komputasi (ELKOM), 2(1): 20-29. http://doi.org/10.32528/elkom.v2i1.3134
[18] Satria, D. (2023). Perancangan tempat sampah otomatis dengan sistem monitoring ketinggian sampah berbasis web. Jurnal Mosfet, 3(2): 1-4. https://doi.org/10.31850/jmosfet.v3i2.2452
[19] Kusuma, V.A., Putra, M.I.A., Suprapto, S.S. (2022). Sistem monitoring stok dan penjualan minuman pada vending machine berbasis Internet of Things (IoT) menggunakan Google sheets dan Codular. Jurnal Sistim Informasi Dan Teknologi, 4(3): 94-98. https://doi.org/10.37034/jsisfotek.v4i3.136
[20] Mulyono, M.A. (2019). Simulasi alat penjaring ikan otomatis dengan penggerak motor servo continuous, sensor jarak Hc-Sr04 dan tombol, menggunakan arduino mega. E-Bisnis: Jurnal Ilmiah Ekonomi dan Bisnis, 12(1): 39-48. https://doi.org/10.51903/e-bisnis.v12i1.82
[21] Widagdo, D.Y. (2020). Sistem pencatatan hasil timbangan menggunakan sensor load cell melalui database berbasis arduino uno. Journal of Telecommunication Network (Jurnal Jaringan Telekomunikasi), 10(1): 13-19.
[22] Islamy, C.C. (2023). Rancang bangun monitoring volume dan segregasi sampah dengan sensor ultrasonic. In Senakama: Prosiding Seminar Nasional Karya Ilmiah Mahasiswa, 2(1): 762-777.
[23] Putra, Y.D.A., Sari, C. (2022). Pengaplikasian sensor DHT22 berbasis arduino sebagai penetas telur ayam kampung. ELECTRA: Electrical Engineering Articles, 2(2): 42-48.
[24] Rumansyah, D.A., Amini, S., Mulyati, S., Purwanto, P. (2022). Rancangan alat pemilah sampah otomatis menggunakan sensor ultrasonik Hc-Sr04, microcontroller nodemcu dan sensor proximity. Sistem Komputer dan Teknik Informatika, 5(1): 125-135. https://doi.org/10.36080/skanika.v5i1.2920
[25] Mahendra, R., Salamah, I., Nasron, N. (2020). Kotak sampah otomatis berbasis arduino mega 2560. Jurnal Qua Teknika, 10(2): 24-33. https://doi.org/10.35457/quateknika.v10i2.1193
[26] Isnawaty, I., Subardin, S., Normawan, L.L. (2022). Penerapan Internet of Things (IoT) pada sistem monitoring tempat sampah rumah tangga menggunakan metode haversine formula. Digital Transformation Technology, 2(2): 35-44. https://doi.org/10.47709/digitech.v2i2.1803
[27] Putri, T.W.O., Alvianingsih, G., Maharani, P. (2023). Perancangan sistem monitoring pada pemilah sampah otomatis berbasis Internet of Things menggunakan aplikasi blynk. Energi & Kelistrikan, 15(1): 31-40. https://doi.org/10.33322/energi.v15i1.1942
[28] Sumadikarta, I., Isro’I, M.M. (2020). Perancangan smarthome berbasis arduino nodemcu ESP8266 (Studi kasus: Griya setu permai). Jurnal Ilmiah Fakultas Teknik LIMIT’S, 16(1): 26-36.
[29] Syaputra, A., Stiadi, D. (2020). Pemanfaatan Mikrotik untuk jaringan hotspot dengan sistem voucher pada desa ujanmas kota pagar alam. Jurnal Informatika dan Rekayasa Elektronik, 3(2): 176-186.
[30] Safitri, M., Faridi, F., Zulfian, M.R. (2021). Aplikasi smart trash bin monitoring system berbasis Internet of Things (IoT). JIKA (Jurnal Informatika), 5(3): 391-399.