M. Rabie Abd-Elwahab![]() | Mostafa M. Makrahy
| Mostafa M. Makrahy![]() | Nouby M. Ghazaly*
| Nouby M. Ghazaly*![]() | Ahmad O. Moaaz
| Ahmad O. Moaaz![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The suspension system design has been one of the most challenging tasks for engineers due to the importance of its role in reducing the road vibrations transmitted to the vehicle, which have a harmful effect on the human body. This research aims to use and compare different optimization techniques used to design the passive suspension parameters, including the spring stiffness (Ks), damping coefficient (Cs), and tire stiffness (Kt), to minimize body accelerations and subsequently enhance ride comfort for vehicles. The quarter car is modelled as a two-degrees-of-freedom system by using MATLAB/Simulink. Different optimization techniques were introduced and used, such as Taguchi, Genetic Algorithms (GA), and Simulated Annealing (SA), to design the passive suspension parameters. The results showed that the optimal design parameters for suspension systems were obtained using GA and SA methods, which reduced the value of the root mean square of vertical vibration by approximately 44% and the peak of acceleration by approximately 60% compared to the original values. The Taguchi approach reduces the value of the root mean square by approximately 32% and the peak of the acceleration by approximately 28% compared to the original values
vehicle passive suspension system, ride comfort, genetic algorithm, vibration reduction, simulated annealing, Taguchi
Vehicle suspension systems have the most important among other vehicle system. The suspension systems are significant for passengers due to improve the ride comfort and increase the safety issue. The main function of suspension systems is absorbing and dissipating the energy of bumps on the road, thus reducing vibrations and shocks transmitted to the car [1]. Tire stiffness, damping coefficient and spring stiffness are three major components of any suspension system. The stiffness of a spring governs the amount of compression or expansion that occurs when a given force is applied. This represents the spring's resistance to deformation. The damping coefficient measures how well the shock absorber is able to dissipate the energy generated during suspension movements. Tire stiffness, damping coefficient and spring stiffness are three major components of any suspension system. The stiffness of a spring governs the amount of compression or expansion that occurs when a given force is applied. This represents the spring's resistance to deformation. The damping coefficient measures how well the shock absorber is able to dissipate the energy generated during suspension movements.
It controls how soon the suspension recovers to its equilibrium position following displacement. The tire stiffness reflects the tire's resistance to distortion under load. This impacts the capacity of the tire to transfer forces between the vehicle and the road surface. Vibrations, in particular, are a major concern regarding ride comfort. Vibrations are produced by the interaction of the vehicle and the road surface, which can be conveyed to the passengers. These vibrations can be caused by a variety of factors, such as road roughness, tire-road contact, and vehicle dynamics. Passive suspension systems assist in decreasing vibration transmission to passengers by properly regulating and attenuating vibrations. This reduces the potential for discomfort; improves road holding, stability, and handling; and improves overall vehicle safety [2-6].
Traditional design approaches focus on meeting performance requirements without optimizing solutions, while optimization techniques offer a systematic framework for efficient and cost-effective performance optimization. Optimization methods are the process of determining the optimum or most effective values for maximizing or minimizing the goal function. Since the creation of computers, optimization methods have been prominent in the design of suspension systems because they provide the optimum solution in the shortest amount of time, especially when dealing with complex issues. Many techniques have been developed and used to address a variety of engineering challenges in the field of optimization [7, 8].
Commonly employed optimization methods and algorithms include gray system theory [9], artificial neural networks [10], Particle swarm optimization [11], genetic algorithms [12, 13], simulated annealing algorithms [14], and the Taguchi methodology [15].
Each method offers unique features and strategies for exploring and optimizing the solution space. For example, the GA's population-based method, which includes creating different solutions and iteratively refining them via selection, crossover, and mutation, facilitates efficient investigation and utilization of the solution space [16]. SA is a probabilistic optimization technique that draws analogies from the annealing process in metallurgy, which employs a temperature parameter that controls the search behavior, allowing for a balance between observation and exploitation. SA is characterized by its ability to escape local optima by allowing for occasional uphill moves, which helps in exploring the solution space more comprehensively. This property makes SA suitable for addressing suspension optimization problems that may have multiple local optima [17, 18]. The Taguchi method utilizes an orthogonal table to select specific experimental parameters. A small number of experimental combinations were used to evaluate how these parameters affect the products. The aim is to identify the most favourable combination of parameters that yields stable test results and minimal fluctuations, regardless of controllable and uncontrollable factors. This method assures that the goods' functioning and performance remain unaffected by any deviations, increasing their stability and resilience to external influence [19, 20].
As a result, many researchers are examining suspension systems to determine the optimal suspension settings among competing needs. Studies [21, 22] used a genetic algorithm to determine the appropriate automobile suspension settings to reduce car suspension deflection and driver body acceleration, resulting in maximum driver comfort. A neighborhood genetic algorithm was used to evaluate the kinematic features of a MacPherson strut suspension system in a pickup truck and select the best configuration [23].
Studies [24, 25] applied a multi-objective genetic algorithm optimization approach to improve ride comfort and road retention in suspension vehicle systems, including driver seats. In another application approach, the simulated annealing technique (SA) was applied to optimize parameters for passive suspension systems to enhance vehicle characteristics by improving ride comfort [26, 27]. Shinde et al. [28] optimized the half-car suspension system using a variety of optimization approaches, including hybrid genetic annealing, simulated annealing, and genetic algorithms, intending to provide ride comfort by minimizing passive suspension system accelerations.
Furthermore, another optimization implementation was used through the Taguchi method. The Taguchi technique was used to study the factors influencing the vibration of the suspension system in a quarter car model. The smallest vertical displacement of the seat driver and the shortest settling time were determined by the Taguchi technique [29]. It has also been used to determine the best settings that improve ride comfort and reduce vibration, while being able to determine how the damping characteristics and stiffness of the front and rear suspension affect the vibration behavior of the suspension [30-32]. Suspension performance and ride comfort have been optimized using various optimization techniques including genetic algorithms (GAs), simulated annealing (SA) and the Taguchi method. However, whether these techniques are applicable or effective in improving passive suspension systems has not been systematically evaluated. This research ensures the need to fill this knowledge gap and provides useful insights into the use of optimization approaches for passive suspension systems.
The main objective of this study to provide useful information on the use of optimization techniques such as genetic algorithm, simulated annealing and Taguchi method for two degrees of freedom method for passive suspension systems. It attempts to identify optimal suspension parameters that can address issues such as insufficient damping capabilities, erroneous values of suspension stiffness, and limited adaptability in response to changing road inputs. Overall, this research tries to be part of the progress towards improved design and optimization methods for suspension, ultimately leading to enhanced comfort and performance in passive suspension system.
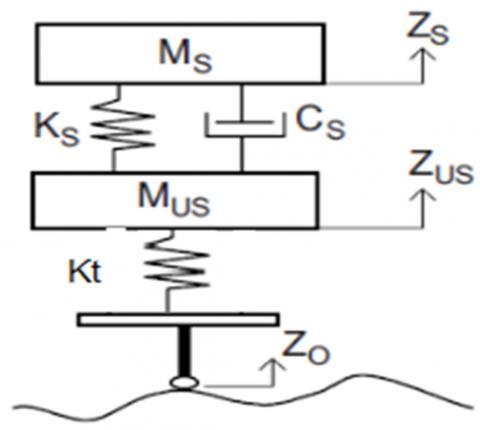
The quarter-car model possesses the distinct advantage of being exceptionally clear and straightforward. Consequently, this simplified model is widely employed in the analysis of vehicle suspension systems due to its uncomplicated nature. This simplified representation includes essential parts such as the tire, spring, damper, and masses. The model exclusively considers the vertical oscillations of the car body, yet it can still capture the principal characteristics of the comprehensive full-scale model. This ability to provide useful insights while maintaining a streamlined approach makes the quarter-car model particularly valuable during the preliminary stages of suspension design [33-35].
Figure 1 shows all the elements of the system model employed in this study, including the vehicle weight (sprung mass, Ms), tire and axle weight (unsprung mass, Mus), spring suspension stiffness (ks), chock absorption coefficient (Cs), and tire stiffness (Kt). zo, zs, and zus are the input road effect on the tire, the vehicle body mass, and the axle mass, respectively.
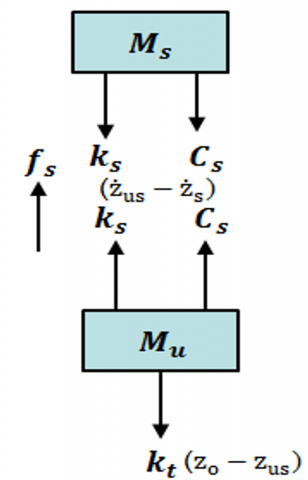
$\ddot{z}_s$ and $\ddot{z}_{u s}$ represent the acceleration of each mass in the vertical direction. $\dot{z}_s$ and $\dot{z}_{u s}$ represent the velocity of each mass in the vertical direction [36, 37].
In the equilibrium state of the system, the equation of motion (EOM) for every mass is derived. The equation is developed using the free body diagram for sprung and unsprung masses, as shown in Figure 2. To simplify the calculations, the system is assumed to be linear, where zo is greater than zus and zus is greater than zs. Kt and Ct are the stiffness constants of the tire, and Ks and Cs are the stiffness and damping constants of the shock absorber, respectively. Eq. (1) and Eq. (2) can be used to express the EOM for both the sprung and unsprung masses, according to the free body model in Figure 2.
$\mathrm{M}_{\mathrm{s}} \ddot{\mathrm{z}}_{\mathrm{s}}=\mathrm{K}_{\mathrm{s}}\left(\mathrm{z}_{\mathrm{us}}-\mathrm{z}_{\mathrm{s}}\right)+\mathrm{C}_{\mathrm{s}}\left(\dot{\mathrm{z}}_{\mathrm{us}}-\dot{\mathrm{z}}_{\mathrm{s}}\right)$ (1)
$\begin{gathered}\mathrm{M}_{\mathrm{us}} \ddot{\mathrm{z}}_{\mathrm{us}}=\mathrm{K}_{\mathrm{t}}\left(\mathrm{z}_{\mathrm{o}}-\mathrm{z}_{\mathrm{us}}\right)-\mathrm{K}_{\mathrm{s}}\left(\mathrm{z}_{\mathrm{us}}-\mathrm{z}_{\mathrm{s}}\right)-\mathrm{C}_{\mathrm{s}}\left(\dot{\mathrm{z}}_{\mathrm{us}}\right. \left.-\dot{\mathrm{z}}_{\mathrm{s}}\right)\end{gathered}$ (2)
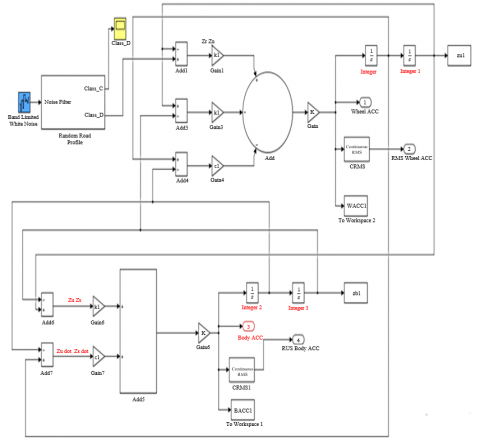
MATLAB/Simulink is a widely used platform for modelling and simulation of dynamic systems. Therefore, the quarter-car model was developed using MATLAB/Simulink, which consists of a simplified passive suspension system, as shown in Figure 1. There are several key assumptions that allow for a simplified representation of the suspension dynamics, which can be useful for preliminary design and analysis.
Figure 1. Passive quarter-car model
Figure 2. Free body diagram for sprung and unsprung masses
The model exclusively focused on the vertical motions of the car body and wheel, disregarding other degrees of freedom such as pitch, roll, and lateral movement. The tire-road interaction was represented as a linear spring, resulting in negligible deformations and the absence of slip. Furthermore, the sprung and unsprung masses were treated as rigid bodies, with any structural flexibility dismissed entirely.
Additionally, the damping was assumed to exhibit a linear, velocity-dependent characteristic, precluding the consideration of any nonlinear effects. Figure 3 shows the quarter-car model that was created using MATLAB Simulink for simulation with the use of all the control settings that were given.
Figure 3. Quarter-car model MATLAB/Simulink
Based on a detailed literature survey, the damping coefficient, spring stiffness, and tire stiffness are important, and their design has effects on quarter car suspension acceleration due to their direct influence on the system's dynamic behavior. Therefore, it greatly affects both ride comfort and road handling. The ranges of the three control parameters in addition to the original data are selected based on the previous literature [2, 31, 36, 38-40].
Table 1 lists the upper and lower limits for the three control parameters utilized in this work, as well as the original data. Additionally, the control parameters and their levels, which were determined by the Taguchi method for the analysis and optimization of the quarter-car suspension model, are shown in Table 2.
Table 1. Design parameter ranges
|
Design Parameters |
Original |
Lower Bound |
Upper Bound |
|
Damping coefficient (C) (Ns/m) |
1000 |
900 |
4000 |
|
Spring stiffness (Ks) (N/m) |
16812 |
12000 |
30000 |
|
Tyre stiffness (Kt) (N/m) |
190000 |
120000 |
200000 |
|
Sprung mass (M) = 250 kg |
|||
|
Unsprung mass (m) = 50 kg |
|||
Table 2. Taguchi method design parameters and their levels
|
Design Parameters |
Level 1 |
Level 2 |
Level 3 |
|
Damping coefficient (C) (Ns/m) |
900 |
2450 |
4000 |
|
Spring stiffness (Ks) (N/m) |
12000 |
21000 |
30000 |
|
Tyre stiffness (Kt) (N/m) |
120000 |
160000 |
200000 |
4.1 Taguchi technique
The Taguchi method is a powerful set of statistical techniques developed by Genichi Taguchi to improve the quality of manufactured products. The present three optimization approaches have been used extensively in engineering to achieve optimal product and process performance by minimizing the influence of noise factors and amplifying the effects of signal factors. In this study, suspension systems were used as examples for demonstration purposes on how important an orthogonal Taguchi array (OA) is when analyzing system design parameters. In essence, the Taguchi parameter design technique can make the best adjustments with respect to performance features and minimize system sensitivity. The powerful Taguchi design methodology is based on signal-to-noise ratio (S/N) and orthogonal matrices, which allow simultaneous evaluation of multiple factors as well as minimal variations due to random noise beyond one's control. The principle behind the Taguchi method is that improving the overall product quality and durability is what matters most to any engineer; therefore, it has remained an extremely valuable tool in the engineering field [41-43].
The goal of this paper is to make the car ride smoother by reducing road vibrations. This session focusing on choosing options that has a lower S/N ratio. The mathematical equation for the S/N ratios for the “lower - is - better” strategy is written in Eq. (3).
$\eta=-10 \log \left[\frac{1}{n} \sum_{i=0}^n \frac{1}{Y_i^2}\right]$ (3)
where, η is the resultant S/N ratio and n is the total number of data points. In addition, the analysis of variance (ANOVA) is considered to evaluate the effectiveness of each factor and its interactions [44, 45].
4.2 Simulated annealing technique
Metropolis et al. [46] and Kirkpatrick et al. [47] introduced the basic concept behind simulated annealing (SA). Using the SA serves as an optimization technique that starts the search procedure from a randomly chosen position. Within a specified range, the algorithm cycles through different points and evaluates the value of the objective function of each point with respect to the previous point. In the context of minimization problems, if the value of the objective function of the new point is less than the value of the objective function of the starting point, the algorithm accepts it as the current solution. This procedure is iterative, as the algorithm searches the solution space and accepts additional points that minimize the value of the objective function. If the change in the objective function (∆F) is less than or equal to 0, the new point is automatically accepted and becomes the starting point for the next step. The algorithm will then go to the next step. Higher objective function values (∆F > 0) may also be accepted, but with a probability calculated by the metropolis criteria, as defined by the Boltzmann factor Eq. (4).
$\mathrm{Pb}(\mathrm{x})=\mathrm{e}^{\left(\frac{\mathrm{F}(\mathrm{x} 1)-\mathrm{F}(\mathrm{x} 2)}{\mathrm{KT}}\right)}$ (4)
where, K is Boltzmann's constant and is equal to 1.3806*10-23, f(x) is the objective function value of the system in state x and T is the current temperature.
The SA algorithm has the unique ability to sometimes accept solutions with higher objective function values, enabling it to escape the local optimum. As the algorithm progresses, the step size used to generate new solutions is gradually reduced, facilitating convergence towards the final optimal solution. The Metropolis parameters, which are based on two user-defined parameters, T (temperature) and RT (temperature reduction factor), affect the probability of adopting a solution with a higher objective function value. This process mimics real-world annealing, where the probability of accepting higher values reduces as the temperature (T) reduces. The temperature is updated after each iteration using Eq. (5).
$T_i+1=R T * T_i$ (5)
where, (i) is the current iteration. The parameter NT denotes the number of iterations between successive temperature reductions, as described in studies [48, 49]. Given that the performance of the Simulated Annealing (SA) algorithm is contingent on user-defined parameters and that the algorithm's performance is significantly influenced by the selection of parameters T, RT, and NT.
4.3 Genetic algorithm technique
Genetic algorithms are a specific class of evolutionary algorithms that are based on the principles of natural selection and natural genetics. This class of algorithms was originally developed by I. Holland and his student D. Jong in 1975. Later, D. Jong (2000) expanded the genetic algorithm approach to functional optimization problems. This expansion necessitated the use of optimization search techniques grounded in the Darwinian concept of natural selection and evaluation.
A gene can be considered a string of bits during GA optimization, where the string is coded to represent the design parameters $\left(\mathrm{X}_1, \mathrm{X}_2, \ldots \ldots, \mathrm{X}_{\mathrm{k}}\right)$. The initial population is the first step in the implementation of any GA. The length of the bit string, which represents the starting population of genes, is determined by the issue that has to be solved and is generated at random. Following the generation of an initial population of solutions, each solution (chromosome) is assigned a fitness value, which reflects the goodness value, whereas the fitness value in Eq. (6) represents the objective function (OBJ) assessment of the decoded chromosome. The objective function plays the role of the environment in ranking the members of the chromosome population.
Fitness value $=\mathrm{OBJ}\left(\mathrm{X}_1, \mathrm{X}_2, \ldots \ldots, \mathrm{X}_{\mathrm{k}}\right)$ (6)
To determine the best decision variable, the optimization process involves maximizing an objective function while adhering to the specified constraints. In the present approach, the variables are represented using binary string encoding. Eq. (7) furnishes a mapping function that guarantees the variable values remain within their predefined bounds.
From Eq. (7), the bit-in is the string length (the bit length of the chromosome) used to code a variable, and B2Dk (binary to decimal) is the decoded value of the string. where $\left(\mathrm{L}_{\mathrm{bk}}, \mathrm{U}_{\mathrm{bk}}\right)$ are the lower and upper bounds of the variable Xk.
$\mathrm{Xk}=\mathrm{B} 2 \mathrm{Dk}\left[\left(\mathrm{U}_{\mathrm{bk}}-\mathrm{L}_{\mathrm{bk}}\right) /(2 \mathrm{bit}-1)\right]+\mathrm{L}_{\mathrm{bk}}$ (7)
The variable boundaries are handled by implementing the mapping function in Eq. (7). After selecting a string representation, a random set of solutions is created. Each member of the population is then allocated a fitness value, which represents the quality or goodness of fit of the various solutions.
The evolutionary strategy of a genetic algorithm depends on how to generate a new solution from the previous one. The evolutionary strategy uses reproduction, elitism, crosser, mutation, and termination operations. The reproduction operator duplicates the best-performing solutions in the population and discards the worst-performing ones, all while keeping the population size stable. The elitism (elt) operator prevents the best gene from disappearing and improves the accuracy of optimization during reproduction operations. Crossover (pc) is the process of obtaining a new candidate's solution from the previous candidate's solution. Mutation (pm) is the process of manipulating individual genetic algorithms into candidate solutions. Termination is the mechanism for stopping the evolutionary process of the genetic algorithm. Termination occurs when the algorithm has reached a predetermined number of generations and an acceptable solution has been found [50, 51].
5.1 Taguchi technique
In the Taguchi method, select of the appropriate orthogonal array (OA), depends on the total degree of freedom (DOF), which is defined as (number of factors × (number of levels - 1)) + 1. In the present work, three design parameters with three levels are selected with a total DOE equal to 6 as shown in Table 2.
Based on the Taguchi method, the L27-OA was used, which allows for investigation of not just the impacts of the primary factors but also the interactions between the factors.
The root mean square (RMS) of the sprung mass vibration was used to quantify the amplitude or intensity of vibrations experienced by the sprung mass in a suspension system. It provides a measure of the overall magnitude of vibrations over a given time period. The mathematical formulation for calculating the RMS of sprung mass vibration can be summarized as follows:
$\mathrm{RMS}=\sqrt{\frac{1}{\mathrm{~N}}\left[\sum_{\mathrm{i}=1}^{\mathrm{N}} \mathrm{x}_{\mathrm{i}}{ }^2\right]}$ (8)
where,
N is the total number of data points in the time domain, and xirepresents each data point in the time domain.
Table 3 presents an L27 orthogonal array with responses (RMS of sprung mass vibration) and their respective signal-to-noise (S/N) ratios.
Table 3. L27 - OA response values and S/N ratio for quarter-car acceleration
|
No. |
Damping Co. |
Spring Stiffness |
Tyre Stiffness |
Acc. |
S/N Ratio |
|
1 |
900 |
12000 |
120000 |
0.1636 |
15.7243 |
|
2 |
900 |
12000 |
160000 |
0.1625 |
15.7829 |
|
3 |
900 |
12000 |
200000 |
0.1639 |
15.7084 |
|
4 |
900 |
21000 |
120000 |
0.4157 |
7.6244 |
|
5 |
900 |
21000 |
160000 |
0.3938 |
8.0945 |
|
6 |
900 |
21000 |
200000 |
0.3818 |
8.3633 |
|
7 |
900 |
30000 |
120000 |
0.8161 |
1.7651 |
|
8 |
900 |
30000 |
160000 |
0.7542 |
2.4503 |
|
9 |
900 |
30000 |
200000 |
0.7182 |
2.8751 |
|
10 |
2450 |
12000 |
120000 |
0.1838 |
14.7131 |
|
11 |
2450 |
12000 |
160000 |
0.1978 |
14.0755 |
|
12 |
2450 |
12000 |
200000 |
0.2115 |
13.4938 |
|
13 |
2450 |
21000 |
120000 |
0.2413 |
12.3489 |
|
14 |
2450 |
21000 |
160000 |
0.2465 |
12.1637 |
|
15 |
2450 |
21000 |
200000 |
0.2543 |
11.8931 |
|
16 |
2450 |
30000 |
120000 |
0.3412 |
9.3398 |
|
17 |
2450 |
30000 |
160000 |
0.3323 |
9.5694 |
|
18 |
2450 |
30000 |
200000 |
0.3307 |
9.6113 |
|
19 |
4000 |
12000 |
120000 |
0.3291 |
9.6534 |
|
20 |
4000 |
12000 |
160000 |
0.3546 |
9.0052 |
|
21 |
4000 |
12000 |
200000 |
0.3774 |
8.4640 |
|
22 |
4000 |
21000 |
120000 |
0.3602 |
8.8691 |
|
23 |
4000 |
21000 |
160000 |
0.3804 |
8.3952 |
|
24 |
4000 |
21000 |
200000 |
0.3997 |
7.9653 |
|
25 |
4000 |
30000 |
120000 |
0.4128 |
7.6852 |
|
26 |
4000 |
30000 |
160000 |
0.4241 |
7.4506 |
|
27 |
4000 |
30000 |
200000 |
0.4376 |
7.1785 |
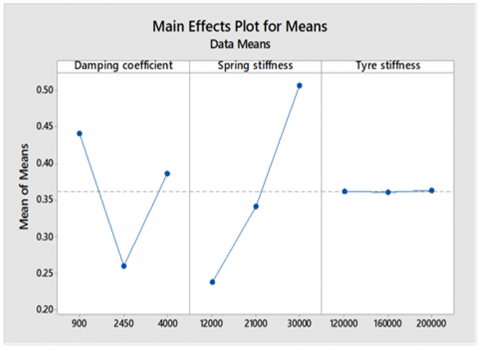
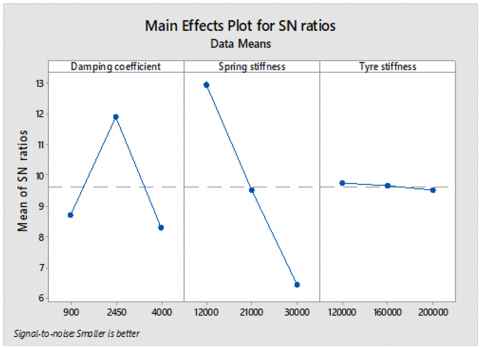
5.1.1 Main effect plot
The main effects plot for the means is plotted in Figure 4 which shows the effect of the input parameters (damping coefficient (C), spring stiffness (Ks), and tire stiffness (Kt)) on the passive suspension vibration. Figure 4 shows that the acceleration of the quarter car suspension increases with increasing spring stiffness from 12000 N/m to 30000 N/m. The acceleration of the quarter-car suspension decreases with an increase in the damping coefficient from 900 Ns/m to 2450 Ns/m and decreases with a further increase in the damping coefficient from 2450 N/m to 4000 N/m. This figure also indicates that tire stiffness has little or no effect on quarter-car acceleration.
Figure 5 shows the calculated and plotted the mean values of the S/N ratios achieved using the smaller-the-better technique for all three design parameters and levels.
When assessing the S/N ratio data, a higher S/N ratio corresponds to a lower variance of the output characteristic, which is preferable. The highest S/N ratio is equal to the minimum RMS of the sprung mass acceleration.
Thus, the optimal input parameters that give the minimum RMS of the sprung mass acceleration were obtained at a damping coefficient of 900 N-s/m (level 1), spring stiffness of 12000 N/m (level 1), and tire stiffness of 160000 N/m (level 2). Additionally, the corresponding RMS sprung mass acceleration is 0.1625 m/s2.
Figure 4. Main effects plot
Figure 5. The S/N plot
5.1.2 Analysis of variance (ANOVA)
The Taguchi technique cannot assess and quantify the influence of individual factors on the overall process, but analysis of variance (ANOVA) may determine the percentage contribution of each parameter.
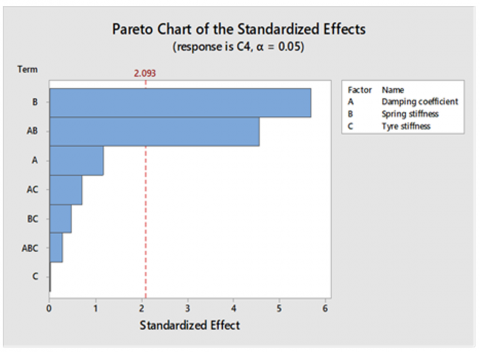
Table 4 presents the ANOVA results, which included the effects of each parameter on the response (RMS values of the vertical body vibration), the residual error, and the possible interactions between the parameters, while Figure 6 shows a bar chart for the same results.
The results in Table 4 provide an overview of the relative contributions of each control parameter to the suspension system.
Lower p values give more evidence against the null hypothesis; when p values < 0.05, it reveals that the factor impact is substantial and the null hypothesis may be rejected.
Figure 6. Pareto chart of the standardized effects
Table 4. Analysis of variance for means (ANOVA)
|
Source |
DOF |
Adj. SS |
Adj. MS |
F-Ratio |
P Value |
Contribution% |
|
C |
2 |
0.077662 |
749.52 |
0.000 |
0.000 |
11.58 |
|
Ks |
2 |
0.332053 |
0.166027 |
1602.32 |
0.802 |
49.51 |
|
Kt |
2 |
0.000047 |
0.000024 |
0.23 |
0.000 |
0.007 |
|
C* Ks |
4 |
0.252390 |
0.063098 |
608.95 |
0.002 |
37.65 |
|
C* Kt |
4 |
0.005187 |
0.001297 |
12.51 |
0.021 |
0.77 |
|
S = 0.01018; R-Sq = 99.9%; R-Sq(adj) = 99.6% |
||||||
As revealed by the analysis of variance table, the factor exerting the most significant influence on the system's behavior is the spring stiffness, with a contribution of 49.51%. This is followed by the interaction between the damping coefficient and the spring stiffness, which contributes 37.6 5%, as well as the damping coefficient itself, which contributes 11.58%. The lowest contribution, at 0.007%, was observed for tire stiffness. This table clearly indicates that tire stiffness can be considered negligible in comparison to the other parameters.
The estimated standard deviation of the regression, denoted as S, indicates the average deviation error of the model, and in this case, the value is set to 0.01. Both the R-Sq and R-Sq (adj) values represent the proportion of the variance in the response data that is explained by the model.
The R-Sq value of 99.9% for the suspension vibration model quantifies the goodness of fit of the regression model, as determined by ANOVA. This means that the model accounts for 99.9% of the variation in the response data, with the remaining 0.01% attributable to noise effects. The R-Sq reflects how well the model fits the observed data.
The high R-Sq value of 99.9% and the adjusted R-Sq (R-Sq (adj)) of 99.6% obtained from the Taguchi technique runs indicate a high degree of reliability and dependability of the experimental model. These statistics suggest that the regression model can be effectively used to determine the optimal parameter values and perform sensitivity analyses on the various parameters.
5.2 Simulated annealing technique
MATLAB R2014a software was used to program the simulated annealing (SA) process. The accuracy of the SA optimization depends on the selected parameters summarized in Table 5. This study used Boltzmann annealing as an annealing function, which involves random steps with sizes proportional to the square root of the temperature. The reannealing interval refers to the number of points that must be accepted before the reannealing process is triggered. An exponential temperature update strategy was implemented, wherein the temperature was decreased to 0.95.
Table 6 summarizes the values of the design parameters and their corresponding vertical accelerations with different maximum iterations, reannealing intervals, and initial temperatures. The optimal outcome was achieved at 500 iterations, a reannealing interval of 50, and an initial temperature of 80, as shown in Table 6.
Table 5. SA control parameters
|
Parameters |
Values |
|
Start point |
0.5 for each variable parameter |
|
Initial temperature,T |
20 and 80 |
|
Annealing function |
Boltzmann annealing |
|
Temperature update function |
Exponential temperature |
|
Reannealing interval |
50 and 100 |
|
Numbers of maximum iteration, NT |
200 and 500 |
|
temperature reduction factor, RT |
0.95 |
Table 6. Design results of the simulated annealing parameters method
|
|
Control Factor |
Design Parameters |
|
||||
|
No. |
Iteration |
Temp. |
Reannealing |
DampingCoefficient |
Spring Stiffness |
Tyre Stiffness |
RMS |
|
1 |
200
|
80 |
100 |
1392.16415 |
12000.02845 |
120000.1823 |
0.134470435 |
|
2 |
80 |
50 |
1392.163481 |
12000.0182 |
120000.228 |
0.1344703 |
|
|
3 |
20 |
100 |
1392.166348 |
12000.02809 |
120000.0613 |
0.13447041 |
|
|
4 |
20 |
50 |
1392.165279 |
12000.01136 |
120000.2118 |
0.13447026 |
|
|
5 |
500 |
80 |
100 |
1392.163235 |
12000.00751 |
120000.1888 |
0.13447022 |
|
6 |
80 |
50 |
1392.162702 |
12000.00663 |
120000.2451 |
0.134470219 |
|
|
7 |
20 |
100 |
1392.163028 |
12000.01375 |
120000.1773 |
0.134470285 |
|
|
8 |
20 |
50 |
1392.165062 |
12000.00853 |
120000.1822 |
0.13447023 |
|
5.3 Genetic algorithm technique
Three sets of GA parameters were used during the optimization process: pc, pm, and elt_no, as control parameters. Other parameters, such as bit_n, popuSize, and gen_no, are fixed at 40, 60, and 500, respectively. The optimal results are summarized in Table 7. As illustrated in Table 7, the first case, in which crossover, mutation, and elitism are all applied, has a minimum value of acceleration compared with other cases.
Table 7. Design results of the simulated annealing parameters method
|
Parameter Design |
Case1 |
Case2 |
Case3 |
Case4 |
|||||||||
|
pc |
pm |
elt_no |
pc |
pm |
elt_no |
pc |
pm |
elt_no |
pc |
pm |
elt_no |
||
|
0.8 |
0.05 |
1 |
0.8 |
0 |
1 |
0.8 |
0.05 |
0 |
0 |
0.05 |
1 |
||
|
Damping Coefficient |
1387.4371 |
1390.5671 |
1380.3381 |
1395.6293 |
|||||||||
|
Spring Stiffness |
12000 |
12000.0 |
12000 |
12000.0382 |
|||||||||
|
Tyre Stiffness |
120000 |
120811.06 |
126034.86 |
120151.781 |
|||||||||
|
RMS |
0.13447184 |
0.134553 |
0.135107 |
0.1344869 |
|||||||||
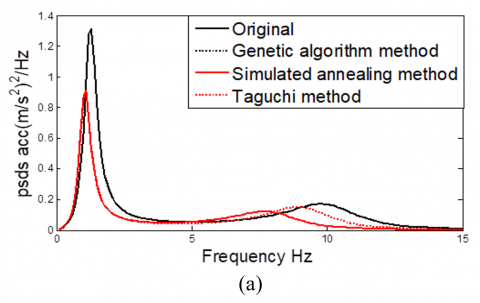
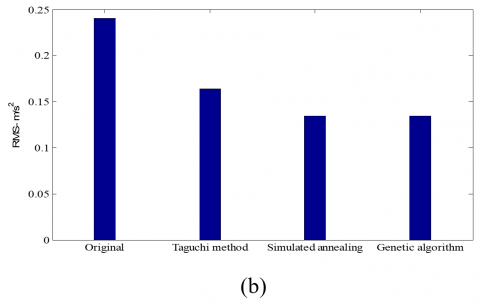
The quarter-car model simulations were performed using the values obtained by using GA, SA, and the Taguchi technique to obtain the RMS of the vertical acceleration of the sprung mass and the highest value of the sprung mass acceleration, as shown in Table 8.
Figure 7 shows a comparison of the RMS vertical acceleration of the sprung mass and the maximum sprung mass acceleration obtained. The peak of the sprung mass vibration is 0.9392 m/s2, 0.5211 m/s2, and 0.5232 m/s2 for the Taguchi, SA, and GA methods, respectively. The simulation results demonstrate that the simulated annealing (SA) method yields a lower value of maximum sprung mass vibration.
Table 8. Comparison of the optimum design parameters with the original data
|
Design Parameters |
Original Data |
Taguchi Method |
Simulated Annealing |
Genetic Algorithm |
|
Damping coefficient (Ns/m) |
1000 |
900 |
1392.162702 |
1387.4371 |
|
Spring stiffness (N/m) |
16812 |
12000 |
12000.00663 |
12000.0 |
|
Tyre stiffness (N/m) |
190000 |
120000 |
120000.2451 |
120000.0 |
|
RMS vertical acceleration of sprung mass (m/s2) |
0.2407 |
0.1636 |
0.134470219 |
0.1344718 |
|
Max. sprung mass acceleration (m/s2) |
1.3080 |
0.9392 |
0.5211 |
0.5232 |
Figure 7. Comparison of the vertical acceleration of the sprung mass
Consequently, the SA method proved instrumental in attaining the optimum values of suspension parameters, which in turn delivered good passenger comfort compared to the original parameters.
Furthermore, it has been observed that the Genetic Algorithm and Simulated Annealing methods can reduce the value of the RMS by 44% in comparison to the original design. Also, the Taguchi method can decrease the value of the RMS by 32% compared to the original design; consequently, the results and procedures employed for the optimization of suspension parameters will prove beneficial for automotive manufacturers in selecting the most suitable combination of suspension parameters to achieve the desired levels of ride comfort and safety for traveling passengers.
The aim of this study is to investigate, analyze and develop the effectiveness of optimization methods to achieve minimum vibration in the suspension system. The results showed that the methods A efficiency methods used in this study are valid and powerful tools by adjusting the value of their components of the middle layer of the tissues of the middle layer of the bed price with Using common standards of about 44% and a value of 60%, the original mean value is reduced by about 32% and the peak acceleration is reduced by 28% from the actual values. The significant decrease in RMS value and peak acceleration obtained by optimization techniques indicates their effectiveness in improving suspension behavior. These improvements have noticeable effects on the overall performance and characteristics of the suspension system. The ANOVA approach reveals that there are two key suspension factors, the damping coefficient and spring stiffness, that contribute significantly to producing reduced RMSs of vertical vibration.
[1] Magrini, A., Lazzari, S., Marenco, L., Guazzi, G. (2017). A procedure to evaluate the most suitable integrated solutions for increasing energy performance of the building’s envelope, avoiding moisture problems. International Journal of Heat and Technology, 35(4): 689-699. https://doi.org/10.18280/ijht.350401
[2] Demircioğlu, U. (2023). Optimization of suspension systems parameters utilizing MSC Adams view and insight. International Conference on Engineering, Natural and Social Sciences, 1: 96-101.
[3] Nkrumah, J.K., Amedorme, S.K., Ziblim, B., Offei, D.I. (2022). Review of suspension control and simulation of passive, semi-active and active suspension systems using quarter vehicle model. American Scientific Research Journal for Engineering, Technology, and Sciences, 90(1): 144-160.
[4] Nagarkar, M., Bhalerao, Y., Bhaskar, D., Thakur, A., Hase, V., Zaware, R. (2022). Design of passive suspension system to mimic fuzzy logic control active suspension system. Beni-Suef University Journal of Basic and Applied Sciences, 11: 109. https://doi.org/10.1186/s43088-022-00291-3
[5] Khan, M.A., Abid, M., Ahmed, N., Wadood, A., Park, H. (2020). Nonlinear control design of a half-car model using feedback linearization and an LQR controller. Applied Sciences, 10(9): 3075. https://doi.org/10.3390/app10093075
[6] Ebrahimi-Nejad, S., Kheybari, M., Borujerd, S.V.N. (2020). Multi-objective optimization of a sports car suspension system using simplified quarter-car models. Mechanics & Industry, 21(4): 412. https://doi.org/10.1051/meca/2020039
[7] Moaaz, A.O., Faris, W.F., Ghazaly, N.M. (2021). Magneto-rheological damper semi-active suspension system control using fuzzy logic controller compared to optimised passive suspension. International Journal of Vehicle Noise and Vibration, 17(3-4): 162-177. https://doi.org/10.1504/IJVNV.2021.123396
[8] Szántó, A., Hajdu, S., Sziki, G.Á. (2023). Optimizing parameters for an electrical car employing vehicle dynamics simulation program. Applied Sciences, 13(15): 8897. https://doi.org/10.3390/app13158897
[9] Wang, C.N., Yang, F.C., Vo, N.T., Nguyen, V.T.T. (2023). Enhancing lithium-ion battery manufacturing efficiency: A comparative analysis using DEA Malmquist and epsilon-based measures. Batteries, 9(6): 317. https://doi.org/10.3390/batteries9060317
[10] Nagarkar, M.P., El-Gohary, M.A., Bhalerao, Y.J., Vikhe Patil, G.J., Zaware Patil, R.N. (2019). Artificial neural network predication and validation of optimum suspension parameters of a passive suspension system. SN Applied Sciences, 1: 569. https://doi.org/10.1007/s42452-019-0550-0
[11] Zhao, L., Zeng, Z., Wang, Z., Ji, C. (2021). PID control of vehicle active suspension based on particle Swarm optimization. Journal of Physics: Conference Series, 1748(3): 032028.
[12] Al-Awad, N.A. (2019). Genetic algorithm control of model reduction passive quarter car suspension system. International Journal of Modern Education & Computer Science, 11(2): 9-16. https://doi.org/10.5815/ijmecs.2019.02.02
[13] Katoch, S., Chauhan, S.S., Kumar, V. (2021). A review on genetic algorithm: Past, present, and future. Multimedia Tools and Applications, 80: 8091-8126. https://doi.org/10.1007/s11042-020-10139-6
[14] Amine, K. (2019). Multiobjective simulated annealing: Principles and algorithm variants. Advances in Operations Research, 2019(1): 8134674. https://doi.org/10.1155/2019/8134674
[15] Aslani, K.E., Kitsakis, K., Kechagias, J.D., Vaxevanidis, N.M., Manolakos, D.E. (2020). On the application of grey Taguchi method for benchmarking the dimensional accuracy of the PLA fused filament fabrication process. SN Applied Sciences, 2: 1016. https://doi.org/10.1007/s42452-020-2823-z
[16] Wei, C.Y., Cai, Y., Zhang, K., Wang, Z., Yu, W.D. (2020). Novel optimal design approach for output - feedback H∞ control of vehicle active seat - suspension system. Asian Journal of Control, 22(1): 411-422. https://doi.org/10.1002/asjc.1887
[17] Moaaza, A.O., Ali, A.S., Ghazaly, N.M., Makrahy, M.M. (2022). Performance evaluation of semi-active suspension for passenger vehicle through skyhook, groundhook and hybrid control strategies. International Journal of Vehicle Structures & Systems, 14(5): 572-579. https://doi.org/10.4273/ijvss.14.5.04
[18] Ghazaly, N.M., Ahmed, A.E.N.S., Ali, A.S., El-Jaber, G.T.A. (2016). H∞ control of active suspension system for a quarter car model. International Journal of Vehicle Structures and Systems, 8(1): 35-40. https://doi.org/10.4273/ijvss.8.1.07
[19] Pereira, A.I., Martins, E.C., Lopes, M.P. (2020). Taguchi method application in the pilot production phase-a case study. Procedia Manufacturing, 51: 1069-1075. https://doi.org/10.1016/j.promfg.2020.10.150
[20] Shojaei, S., Shojaei, S., Band, S.S., Farizhandi, A.A.K., Ghoroqi, M., Mosavi, A. (2021). Application of Taguchi method and response surface methodology into the removal of malachite green and auramine-O by NaX nanozeolites. Scientific Reports, 11: 16054. https://doi.org/10.1038/s41598-021-95649-5
[21] Farid, T.M., Salah, A., Abbas, W. (2011). Design of optimal linear suspension for quarter car with human model using genetic algorithms. Journal of Applied Sciences Research, 7(11): 1709-1720.
[22] Khan, S., Horoub, M.M., Shafiq, S., Ali, S., Bhatti, U.N. (2019). Optimization of vehicle suspension system using genetic algorithm. In 2019 IEEE 10th International Conference on Mechanical and Aerospace Engineering (ICMAE), Brussels, Belgium, pp. 203-207. https://doi.org/10.1109/ICMAE.2019.8880941
[23] Su, Z.Y., Xu, F.X., Hua, L., Chen, H., Wu, K.Y., Zhang, S. (2019). Design optimization of minivan MacPherson-strut suspension system based on weighting combination method and neighborhood cultivation genetic algorithm. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 233(3): 650-660. https://doi.org/10.1177/0954407018789303
[24] Mitra, A.C., Desai, G.J., Patwardhan, S.R., Shirke, P.H., Kurne, W.M., Banerjee, N. (2016). Optimization of passive vehicle suspension system by genetic algorithm. Procedia Engineering, 144: 1158-1166. https://doi.org/10.1016/j.proeng.2016.05.087
[25] Puneet, N.P., Hegale, A., Kumar, H., Gangadharan, K.V. (2019). Multiobjective optimization of quarter car parameters for better ride comfort and road holding. AIP Conference Proceedings. 2200(1): 020046. https://doi.org/10.1063/1.5141216
[26] Al-Khazraji, H., Rasheed, L.T. (2021). Performance evaluation of pole placement and linear quadratic regulator strategies designed for mass-spring-damper system based on simulated annealing and ant colony optimization. Journal of Engineering, 27(11): 15-31. https://doi.org/10.31026/j.eng.2021.11.02
[27] Dinesh, S., Pradip, S., Deshmukh, D.S., Shekhawat, S.P. (2013). Application of simulated annealing algorithm (SA) for design optimization of automobile suspension system. International Journal of Innovative Research in Science, Engineering and Technology, 2: 2119-2122.
[28] Shinde, D., Mistry, K.N., Jadhav, G., Singh, H. (2018). Optimization of automobile suspension system using hybrid GSA algorithm. IOP Conference Series: Materials Science and Engineering, 377: 012149. https://doi.org/10.1088/1757-899X/377/1/012149
[29] Kumar, P.S., Kalidas, R., Sivakumar, K., Hariharan, E., Gautham, B., Ethiraj, R. (2013). Application of Taguchi method for optimizating passenger-friendly vehicle suspension system. International Journal of Latest Trends in Engineering and Technology, 2(1): 133-141.
[30] Xiong, J.Q. (2023). Vibration test and robust optimization analysis of vehicle suspension system based on Taguchi method. SN Applied Sciences, 5: 4. https://doi.org/10.1007/s42452-022-05236-0
[31] Yerrawar, R.N., Suryawanshi, A.S., Dahale, M.P. (2019). Simulation and optimization of semiactive suspension parameters using Taguchi method and grey relational analysis. Simulation, 9(6): 43-55.
[32] Mitra, A.C., Jawarkar, M., Soni, T., Kiranchand, G.R. (2016). Implementation of Taguchi method for robust suspension design. Procedia Engineering, 144: 77-84. https://doi.org/10.1016/j.proeng.2016.05.009
[33] Issa, M., Samn, A. (2022). Passive vehicle suspension system optimization using Harris Hawk Optimization algorithm. Mathematics and Computers in Simulation, 191: 328-345. https://doi.org/10.1016/j.matcom.2021.08.016
[34] Kurse, T.K., Girma, A. (2023). A general review of the fundamentals of MATLAB vehicle passive suspension system Simulink model. Trends in Transport Engineering and Applications, 10(1): 1-17.
[35] Ebrahimi-Nejad, S., Kheybari, M., Borujerd, S.V.N. (2020). Multi-objective optimization of a sports car suspension system using simplified quarter-car models. Mechanics & Industry, 21(4): 412. https://doi.org/10.1051/meca/2020039
[36] Otkur, M., Alshammari, N., Abdullah, N., Alkandari, D., Thyab, H., Alduwaisan, L. (2022). Optimization of suspension system parameters for an SUV. In Proceedings of the 8th World Congress on Mechanical, Chemical, and Material Engineering (MCM'22), Prague, Czech Republic, No. ICMIE 137. https://doi.org/10.11159/icmie22.137
[37] Al-Khazraji, H. (2022). Optimal design of a proportional-derivative state feedback controller based on meta-heuristic optimization for a quarter car suspension system. Mathematical Modelling of Engineering Problems, 9(2): 437-442. https://doi.org/10.18280/mmep.090219
[38] Agharkakli, A., Sabet, G.S., Barouz, A. (2012). Simulation and analysis of passive and active suspension system using quarter car model for different road profile. International Journal of Engineering Trends and Technology, 3(5): 636-644.
[39] Devdutt, Aggarwal, M.L. (2015). Simultaneous optimization of semiactive quarter car suspension parameters using Taguchi method and grey relational analysis. International Journal of Recent Advances in Mechanical Engineering. 4(1): 61-75. https://doi.org/10.14810/ijmech.2015.4106
[40] Stojanovic, N., Ghazaly, N.M., Grujic, I., Doric, J. (2022). Determination of noise caused by ventilated brake disc with respect to the rib shape and material properties using Taguchi method. Transactions of FAMENA, 46(4): 19-30. https://doi.org/10.21278/TOF.464011219
[41] Geraldi Simon, C., Andre Hardinsi, F., Suluh, S., Paliling, F., Sampelolo, R., Widyianto, A. (2023). Enhancing vehicle wheel suspension test equipment through Taguchi method for optimization. Eastern-European Journal of Enterprise Technologies, 5(1(125)): 15-27. https://doi.org/10.15587/1729-4061.2023.288476
[42] Sobh, A.S., Sayed, E.M., Barakat, A.F., Elshaerr, R.N. (2023). Turning parameters optimization for TC21 Ti-alloy using Taguchi technique. Beni-Suef University Journal of Basic and Applied Sciences, 12: 20. https://doi.org/10.1186/s43088-023-00356-x
[43] Sudeesh, S., Warriar, J., Joy, K., Sajul, U., Sreeprasanth, M. (2018). Application of Taguchi method for optimization of process parameters in spur gear milling operation. International Research Journal of Engineering and Technology (IRJET), 5(5): 3464-3474.
[44] Sabarish, K.V., Akish Remo, M., Paul, P. (2019). Optimizing the concrete materials by Taguchi optimization method. IOP Conference Series: Materials Science and Engineering, 574(1): 012002. https://doi.org/10.1088/1757-899X/574/1/012002
[45] Ahmad, M.N., Ishak, M.R., Mohammad Taha, M., Mustapha, F., Leman, Z., Anak Lukista, D.D., Irianto, Ghazali, I. (2022). Application of Taguchi method to optimize the parameter of fused deposition modeling (FDM) using oil palm fiber reinforced thermoplastic composites. Polymers, 14(11): 2140. https://doi.org/10.3390/polym14112140
[46] Metropolis, N., Rosenbluth, A.W., Rosenbluth, M.N., Teller, A.H., Teller, E. (1953). Equation of state calculations by fast computing machines. The Journal of Chemical Physics, 21(6): 1087-1092. https://doi.org/10.1063/1.1699114
[47] Kirkpatrick, S., Gelatt Jr, C.D., Vecchi, M.P. (1983). Optimization by simulated annealing. Science, 220(4598): 671-680. https://doi.org/10.1126/science.220.4598.671
[48] Huang, R., Yin, A., Shen, Y., Du, F., Yang, X.F. (2024). Optimizing hydro-pneumatic inerter suspension for improved ride comfort and handling stability in engineering vehicles using simulated annealing algorithm. World Electric Vehicle Journal, 15(2): 36. https://doi.org/10.3390/wevj15020036
[49] Goto, T., Najafabadi, H.R., Falheiro, M., Martins, T.C., Barari, A., Tsuzuki, M.S. (2021). Topological optimization and simulated annealing. IFAC-Papers OnLine, 54(1): 205-210. https://doi.org/10.1016/j.ifacol.2021.08.078
[50] Hussain, A., Muhammad, Y.S. (2020). Trade-off between exploration and exploitation with genetic algorithm using a novel selection operator. Complex & intelligent systems, 6: 1-14. https://doi.org/10.1007/s40747-019-0102-7
[51] Ozor, G.O., Okafor, E.C., Azubogu, A.C.O. (2021). Genetic algorithm based PID controller tuning model for active suspension system of self-driving vehicle. UNIZIK Journal of Engineering and Applied Sciences, 19(1): 506-518.