Bilal Djamal Eddine Cherif* | Azeddine Bendiabdellah | Mostefa Tabbakh
© 2019 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The open-circuit fault of an inverter IGBT switch leads to total or partial loss of control of the phase currents resulting in the dysfunction of the system. Moreover, if the fault is not detected and compensated quickly, it can cause complete shutdown of the system. To ensure the system service continuity, efficient and fast techniques for detecting and locating the open-circuit fault of the IGBT must be implemented. This paper proposes a Hilbert-Huang Transform (HHT) based on the detection of the IGBT open-circuit fault. The proposed technique is based on the complete empirical mode decomposition with adaptive noise (CEEMDAN). This mode is applied to the motor stator current signals to obtain a function called the intrinsic mode function (IMF). The IMF contains the frequency (and its multiples) related to the frequency of the harmonic characterizing the IGBT switch open-circuit fault of the inverter. In order to test the effectiveness of the proposed technique and validate the results, several experimental tests are performed using a test bench.
inverter, IGBT, open-circuit, HHT, EMD, CEEMDAN, IMF, spectral envelope, RMS
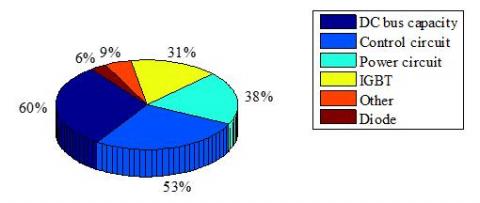
In general, maintenance is intended to ensure the maximum availability of production equipment at an optimal cost under good conditions of quality and safety. The general principle of the diagnostic algorithms is based on the use of the data recorded on the system and the knowledge that one possesses of its healthy operation (for the detection) or its faulty operation (for the location). These algorithms develop symptoms that reveal the faulty behavior and the nature of the dysfunction. In this framework, static converters, particularly inverters, are mainly present in variable speed electrical drive systems. Reliability data; from the literature; justify the envisaged scope for the implementation of fault tolerance or failure. Figure 1 shows the distribution of faults in% in an inverter [1].
Figure 1. Distribution of faults in % in a static converter
Among these diagnostic methods there are spectral analysis techniques based on the Fourier transform (FT). The FT provides a good description of the stationary and pseudo-stationary signals but has many limitations when the signals to be analyzed are not stationary. In this case, the solution would be to use the so-called time-frequency analysis tools. These methods include: the STFT and the Hilbert-Huang Transform (HHT) [2].
The authors Hilbert and Huang have recently proposed a technique that approaches in another angle the problematic of non-stationary signal analysis with the empirical modal decomposition (EMD) approach. The EMD adaptively decomposes a signal in a sum of oscillating components. Unlike FT or wavelets, the basis of the EMD decomposition is intrinsic to the signal. One of the motivations for the development of the EMD is the estimation of the instantaneous frequency (IF) of the signal. Indeed, the conventional approach of estimating the IF based on the Hilbert transformation (HT) is strictly limited to single-component signals. Thus, constraints are imposed on these oscillating components to correctly estimate the IF (with a physical sense) specific to each component present in the signal. The EMD combined with the HT or another method of estimating the IF results in a time-frequency representation (TFR). The EMD is defined by a process called sifting, which decomposes the signal into basic contributions called empirical modes or intrinsic mode functions (IMF). These are signals of amplitude modulation - frequency modulation type mono-component (in broad sense) each of zero average. The principle of the EMD is based on an adapted decomposition describing the signal locally as a succession of contributions of fast oscillations (high frequencies) on slower oscillations (low frequencies) [3-6].
Several papers have been published in this diagnostic field based on the HHT. The author in the paper [7] presents a method using the spectral envelope of the stator current for the online automatic detection of broken bar faults. In this paper, the HHT is used to estimate the severity of faults for different loads using classification techniques. The spectral envelope of the stator current makes it possible to read the frequency relative to the fault, which confirms the existence of the fault. The author [8] proposes a method based on the complete empirical ensemble mode decomposition with adaptive noise (CEEMDAN) associated with an optimized Thresholding operation. The CEEMDAN is first applied to the vibration signals to obtain a series of functions called the IMF functions. An approach based on the energy content of each mode with the white noise characteristic is then proposed to determine the trigger point to select the relevant modes. The author in paper [9] presents a rolling fault diagnosis method based on an improvement time-time of Hilbert (HTT a derivative of the HHT) with the main component which is the Denoising HTT transform matrix. The HTT was performed on vibration signals to deduce the transformed matrix. The main component is then used to attenuate the noise of the HHT matrix in order to improve its robustness and extract information and characteristics of the bearing fault.
This paper proposes an HHT-based diagnostic method for detecting the open-circuit fault of an IGBT in an inverter. The proposed technique is based on complete ensemble empirical mode decomposition with an Adaptive Noise (CEEMDAN). This mode is applied to the motor stator current signals to obtain a function called the intrinsic mode function (IMF) containing the frequency of the harmonic relative to the harmonic characterizing the IGBT fault. In order to test the effectiveness of the proposed technique and validate the results, several experimental tests are carried out on the system using a practical test bench at our LDEE laboratory, consisting of an induction motor powered by a two-level three-phase faulty voltage inverter controlled by the MLI-SVM strategy.
In this section, the principle of HHT will be presented as well as the different versions of decomposition in empirical modes (EMD and CEEMDAN) in addition to the spectral envelope and RMS.
2.1 EMD algorithm
The EMD method decomposes the signal into a finite number of IMFs and a residue. It should satisfy the following conditions [10]:
1) The number of extrema and the number of zero-crossings are equal or differ by one.
2) The mean value of the envelopes defined by local maxima and local minima is zero.
For a given signal (t) , the EMD algorithm is described in the following steps [10]:
1st step: Initialize: r0 = (x(t)) and i=1
2nd step: Extract the iIMF.
(a) Initialize hi(k-1) = ri, k=1.
(b) Extract the local Max and Min of hi(k-1).
(c) Interpolate the local Max and Min with cubic spleen lines to form the upper and lower envelopes of hi(k-1).
(d) Calculate the average mi(k-1) of the upper and lower envelopes of hi(k-1).
(e) Let hik = hi(k-1)- mi(k-1).
(f) If hik is an IMF, set IMFi=hik, otherwise go to step (b) with k=k+1.
3rd step: Define ri+1=ri-IMFi.
4th step: Continue the process until the final residue rn satisfies the predefined stopping criterion. The stopping condition (SD) is calculated from the two consecutive sifting results, namely hk-1 and hk as [9]:
$S D(i)=\sum_{t=0}^{T} \frac{\left|h_{j, i-1}(t)-h_{j, i}(t)\right|^{2}}{\left(h_{j, i-1}(t)\right)^{2}}$ (1)
where: T is the time duration. The sifting process is terminated when the SD value is greater than a certain threshold. Here a typical value of SD can be set between 0.2 and 0.3 [9].
The signal can be expressed as follows:
$x(t)=\sum_{i=1}^{n} c_{i}+r_{n}$ (2)
2.2 CEEMDAN algorithm
The Complete Empirical Ensemble Mode Decomposition an Adaptive Noise (CEEMDAN) is used to solve the EEMD problem related to residual noise and also to the existence of modes with different numbers. The CEEMDAN algorithm is illustrated by the following steps [11]:
1st step: Use the EMD to decompose I realizations of $x+\varepsilon_{0} \omega^{i}(i=1, \dots \dots, I)$ in order to obtain its first modes and to calculate the first mode of the CEEMDAN as follows:
$\overline{I M F}_{1}=\frac{1}{I} \sum_{i=1}^{I} E_{1}\left(x+\zeta \omega_{i}\right)$ (3)
With x, ωi: Gaussian white noise with N(0,1), ε a noise standard deviation, I: Number of sets.
2nd step: Calculate the first residue $r_{1}=x-\overline{I M F}_{1}$.
3rd step: Use the EMD to decompose $r_{1}+\varepsilon_{1} E_{1}\left(\omega^{i}\right),(i=1, \ldots \ldots, I)$ to get its first modes and define the second mode of CEEMDAN as:
$\overline{I M F}_{2}=\frac{1}{I} \sum_{i=1}^{I} E_{1}\left(r_{1}+\zeta_{1} E_{1}\left(\omega^{i}\right)\right)$ (4)
4th step: For k = 2…, k, the residue is given as follows:
$r_{k}=r_{k-1}-\overline{I M F}_{k}$ (5)
5th step: Use EMD to decompose the realizations rk+εkEk(wi), (i=1,...,l)
and define the (k+1)th CEEMDAN mode as follows:$\overline{I M F}_{k+1}=\frac{1}{I} \sum_{i=1}^{I} E_{1}\left(r_{k}+\zeta_{k} E_{k}\left(\omega^{i}\right)\right)$ (6)
With Ek(.): kthIMF product to obtain par the EMD.
6th step: Go to step 4 for the next k.
7th step: Iterate steps 4-6 until the resulting residue can no longer be decomposed by the EMD. The final residue is given as follows:
$r_{n}=x-\sum_{i=1}^{n} \overline{I M F}_{i}$ (7)
So that the given signal can be expressed by:
$x=r_{n}+\sum_{i=1}^{n} \overline{I M F}_{i}$ (8)
With: n: The total number of modes, εk: The amplitude of the added white noise, w : White noise with the unit variance.
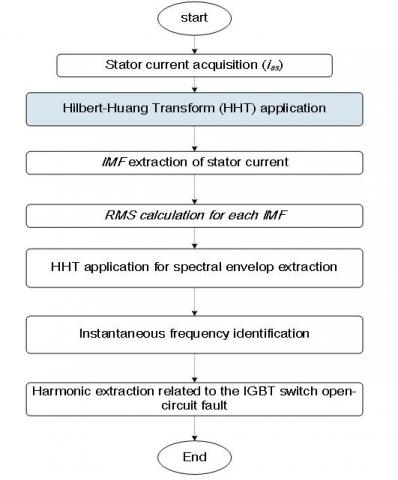
In this paper, the proposed technique is represented by the flowchart of Figure 2 as follows:
Figure 2. Organizational chart of the proposed method
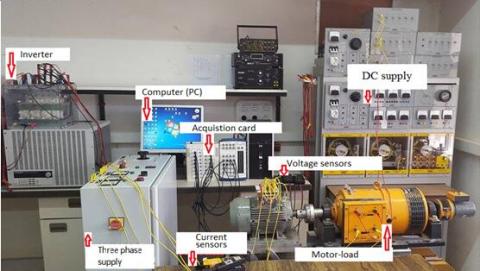
The three-phase inverter used is this work is an IGBT-based three-phase (SEMI-KRON) controlled by the DSPACE 1104 Card. The inverter IGBTs are controlled by the MLI-SVM strategy. The motor used is of a three-phase squirrel cage type; with a nominal power of 3 Kw, a frequency of 50 Hz and a nominal rotor speed of 1440 rpm.
This motor is mechanically coupled to a DC generator used as a load. The measuring system has three voltage sensors (TEKTRONIX P5200) and three Hall-Effect current sensors (FLUCK i30s (AC/DC CURRENT CLAMP)), a tachometer (ONO SOKKI HT-341) and an acquisition card (NI-6330). Finally, the whole set is connected to a computer for visualizing the processed acquired signals as shown in the photo of Figure 3 [12].
Figure 3. Photo of experimental test-rig [12]
Table 1 presents the induction motor parameters and specifications.
Table 1. Parameters of the induction motor
|
Rated Power |
3 KW |
|
Supply frequency |
50 Hz |
|
Rated voltage |
380 V |
|
Rated current |
7A |
|
Rotor speed |
1410 rev/min |
|
Number of rotor bars |
28 |
|
Number of stator slots |
36 |
|
Power factor |
0.83 |
|
Number of pair of poles |
2 |
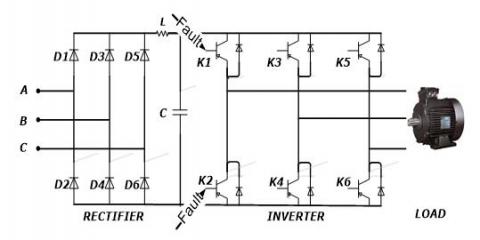
Figure 4 shows the structure of the two-level three-phase voltage inverter. The system consists of a three-phase voltage inverter with two levels based on faulty IGBT switches supplying an induction machine.
Figure 4. Structure of the converter-motor assembly with open-circuit fault
All the acquisitions were made in nominal mode over a period of 5 seconds with a sampling frequency of 1.5 kHz.
The various modes of operation of an inverter-motor assembly made to validate the diagnostic procedure are:
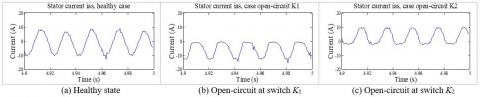
Figure 5 shows the stator current ias in both the healthy and open-circuit faulty cases.
Figure 5 shows the stator current in the normal and abnormal operation of the system. The stator current is characterized with respect to the normal regime by a sudden variation at the instant of the application of the open-circuit fault at the K1 switch resulting in a loss of the positive half-cycle of the current. On the other hand, in the case of a fault at the switch K2, a loss of the negative alternation is observed.
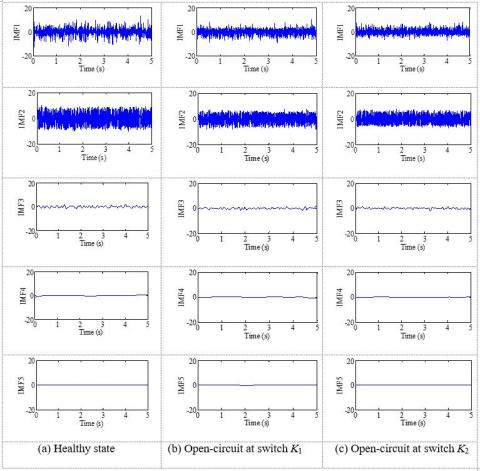
Figure 6 depicts the selected IMFs in the healthy and the open-circuit faulty cases.
Figure 5. Stator current
Figure 6. IMF
3.1 Statistical study
RMS: it is a very characteristic value of the signal, since it has a direct relation with the energy contained in it:
$R M S=\sqrt{\frac{1}{T} \int_{0}^{t} I M F^{2}(t) d t}$ (9)
where: IMF (t) is the representative function of the signal and "t" is the analysis time.
Table 2 presents the RMS value of each IMF. After analyzing the results obtained in Table 2 for each IMF we observed logic in IMF1 that identifies the IGBT fault. K1, 3, 5 are always lower than the values K2, 4, 6 respectively in the case of an open-circuit fault. The IMF1 signal is therefore the one to be used to detect and locate the harmonics that characterizes the open-circuit fault IGBT.
Table 2. RMS value of each IMF
|
State |
IMF1 |
IMF2 |
IMF3 |
IMF4 |
IMF5 |
|
Stator current ias |
|||||
|
Heathy |
82.7486 |
251.5579 |
392.6519 |
93.3259 |
54.5970 |
|
Open K1 |
66.5023 |
188.9364 |
296.1187 |
65.0230 |
44.5439 |
|
Open K2 |
67.2751 |
166.4776 |
292.3342 |
66.4481 |
37.1695 |
|
Open K3 |
95.8056 |
299.4912 |
478.9089 |
104.0427 |
70.1447 |
|
Open K4 |
90.9676 |
290.8385 |
463.9138 |
103.9608 |
55.5179 |
|
Open K5 |
85.4351 |
251.0758 |
439.7275 |
87.3736 |
56.3215 |
|
Open K6 |
85.5871 |
270.7648 |
421.8767 |
96.9308 |
55.5287 |
|
Stator current ibs |
|||||
|
Heathy |
78.1394 |
224.4353 |
400.2280 |
84.5102 |
51.3490 |
|
Open K1 |
83.8776 |
279.4305 |
428.2569 |
98.4593 |
59.4270 |
|
Open K2 |
80.4376 |
259.0379 |
434.0585 |
95.5906 |
63.0193 |
|
Open K3 |
62.0850 |
176.8302 |
293.7399 |
64.8789 |
47.8038 |
|
Open K4 |
64.0776 |
180.4871 |
301.9739 |
66.5300 |
41.6790 |
|
Open K5 |
92.9372 |
276.8886 |
495.3335 |
116.2171 |
68.1189 |
|
Open K6 |
93.9432 |
282.5435 |
474.9952 |
103.5992 |
62.0288 |
|
Stator current ics |
|||||
|
Heathy |
80.5750 |
257.3659 |
422.6741 |
99.5111 |
60.7217 |
|
Open K1 |
94.2862 |
289.2505 |
485.5097 |
102.1549 |
59.3271 |
|
Open K2 |
91.8464 |
312.2062 |
478.6916 |
103.9096 |
69.4545 |
|
Open K3 |
82.6258 |
282.0376 |
428.4229 |
102.7446 |
54.2908 |
|
Open K4 |
79.8416 |
262.4210 |
422.2279 |
103.5813 |
56.0183 |
|
Open K5 |
62.3196 |
194.9059 |
297.3967 |
63.2087 |
43.7761 |
|
Open K6 |
65.1510 |
181.7017 |
304.8296 |
68.6557 |
42.2992 |
3.2 Hilbert spectral envelope
The characteristics of the Hilbert spectral envelope are quoted as follows:
(a) Elimination of the fundamental (50 Hz) of the current spectrum.
(b) Shifting of all frequency signatures to the left of 50 Hz.
(c) Visibility of the frequency signatures of the faults those are generally of very low amplitude due to the absence of the fundamental.
(d) Visibility of the frequency signatures of faults allowing the use of the linear scale instead of the semi-logarithmic scale.
(e) Elimination of the fundamental; only one characteristic frequency component of the fault appears instead of the three lateral bands multiple of 2. As for example for the signature of the open-circuit fault of an IGBT of the inverter.
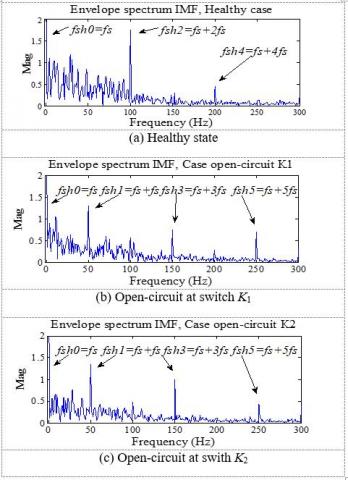
Figure 7 shows the IMF spectral envelope in the healthy case and the case of open-circuit fault at the IGBT switches K1 and K2.
Figure 7. Spectral envelope
Figure 7(a), the harmonic fs is no more visible because of the Hilbert spectral envelope effect that causes the elimination of this harmonic and the shift of all frequencies to the left of the harmonic of 50 Hz. This explains the existence of the harmonics (fsh2) and (fsh4).
In the case of the open-circuit fault of the IGBT switches at K1 and K2, depict the existence of the fundamental harmonic fs (50 Hz) and other harmonics 2fs (100 Hz), 3fs (150 Hz) and 4fs (200 Hz). This explains the existence of the harmonic (fsh1), (fsh3) and (fsh5) in the Hilbert spectral envelope shown in Figure 7(b) and 7(c) hence replacing the harmonic (fs + fs), (fs + 3fs) and (fs + 5fs) with a shifting of 50 Hz.
Table 3 summarizes the amplitudes of the harmonics (fsh1, fsh2, fsh3, fsh4 and fsh5) of the spectral envelope in the healthy and the IGBT open-circuit faulty cases.
Table 3. Amplitude of the (fsh1, fsh2, fsh3, fsh4 and fsh5) of spectral envelope
|
Harmonics |
fsh1(dB) |
fsh2 (dB) |
fsh3 (dB) |
fsh4 (dB) |
fsh5 (dB) |
finst (Hz) |
|
Healthy case |
0 |
1.746 |
0 |
0.4605 |
0 |
0 |
|
Open K1 |
1.309 |
0 |
0.7544 |
0 |
0.707 |
50 |
|
Open K2 |
1.344 |
0 |
0.9951 |
0 |
0.4363 |
50 |
|
Open K3 |
0.8918 |
0 |
0.8079 |
0 |
0.4424 |
50 |
|
Open K4 |
1.329 |
0 |
0.7949 |
0 |
0.7329 |
50 |
|
Open K5 |
1.268 |
0 |
1.04 |
0 |
0.5924 |
50 |
|
Open K6 |
1.316 |
0 |
0.7719 |
0 |
0.615 |
50 |
According to Table 3, a comparative analysis between the healthy and the IGBT open-circuit fault cases clearly shows a frequency signature at about (50Hz) for the Hilbert spectral envelope. It should be noted that this frequency is the one that characterizes the open-circuit fault of the IGBT. In order to confirm the validity of this observation, the instantaneous Hilbert frequency is identified and shown in Figure 8.
Figure 8. Instantaneous frequency of HHT in case of open-circuit fault of switches at K1 and K2
Figure 8 shows that the instantaneous frequency (fsh1=50 Hz) is the frequency that characterizes the open-circuit fault of the IGBT.
In this paper, a method for diagnosing and detecting the harmonic characteristic of the open-circuit fault of an IGBT of the two-stage three-phase inverter supplying an induction motor is proposed. This diagnostic method is based on the Hilbert-Huang transform to identify the instantaneous frequency that allows us to detect the frequency characterizing the open-circuit fault of the IGBT. This paper study is based on the extraction of the IMF for the healthy and the IGBT open-circuit fault cases by using the algorithm (CEEMDAN). To detect the open-circuit faults related to the resulting IMF, the Hilbert spectral envelope are conducted to identify the instantaneous frequency. This instantaneous frequency is the frequency characterizing the open-circuit fault of the IGBT. The method proposed is more efficient and more sensitive to the early detection and the diagnosis of open-circuit fault of the IGBTs of the inverter when compared to the conventional methods for example the wavelet or the STFT. The various results obtained are validated by several experimental works carried out in the LDEE laboratory by the diagnostic group to assess the effectiveness and the merits of the proposed HHT approach.
[1] Kakurin, A.M., Orlovsky, I.I. (2005). Hilbert-Huang transform in MHD plasma diagnostics. Plasma Physics Reports, 31(12): 1054-1063. https://doi.org/10.1134/1.2147651
[2] Neto, E.P.S., Custaud, M.A., Cejka, J.C., Abry, P., Frutoso, J., Gharib, C., Flandrin, P. (2004). Assessment of cardiovascular autonomic control by the empirical mode decomposition. Methods of Information in Medicine, 43(1): 60-65. https://doi.org/10.1267/METH04010060
[3] Janosi, I.M., Muller, R. (2005). Empirical mode decomposition and correlation properties of long daily ozone records. Physical Review E, 71, 056126. https://doi.org/10.1103/PhysRevE.71.056126
[4] Kerschen, G., Vakakis, A.F., Lee, Y.S., McFarland, D.M., Bergman, L.A. (2006). Toward a fundamental understanding of the Hilbert-Huang transform in nonlinear structural dynamics. Proceedings of the 24th International Modal Analysis Conference (IMAC), St-Louis.
[5] Khelif, A.M., Cherif, B.D.E., Bendiabdellah, A. (2018). Diagnosis of SVM controlled three-phase rectifier using mean value of park currents technique. International Review on Modelling and Simulations (IREMOS), 11(2): 93-101. https://doi.org/10.15866/iremos.v11i2.13848
[6] Zhang, J.H., Luo, H., Zhao, J., Wu, F. (2015). A fuzzy-based approach for open-transistor fault diagnosis in voltage-source inverter induction motor drives. The European Physical Journal Applied Physics, 69(2). https://doi.org/10.1051/epjap/2015140066
[7] Raj, N., Mathew, J., Jagadanand, G., George, S. (2016). Open-transistor fault detection and diagnosis based on current trajectory in a two-level voltage source inverter. Procedia Technology, 25: 669-675. https://doi.org/10.1016/j.protcy.2016.08.159
[8] Ouanas, A., Medoued, A., Salim, H., Mordjaoui, M., Sayad, D. (2018). Automatic and online detection of rotor fault state. International Journal of Renewable Energy Development, 7(1): 43-52. https://doi.org/10.14710/ijred.7.1.43-52
[9] Rabah, A., Abdelhafid, K., Azeddine, B., Ziane, D. (2018). Rolling bearing fault diagnosis based on an improved denoising method using the complete ensemble empirical mode decomposition and the optimized thresholding operation. IEEE Sensors Journal, 18(17): 7166-7172. https://doi.org/10.1109/JSEN.2018.2853136
[10] Wu, Z.H., Huang, N. (2011). Ensemble empirical mode decomposition: A noise-assisted data analysis method. Advances in Adaptive Data Analysis, 1(1): 385-388. https://doi.org/10.1142/S1793536909000047
[11] Xue, X.M., Zhou, J.Z., Xu, Y.H., Zhu, W.L., Li, C.S. (2015). An adaptively fast ensemble empirical mode decomposition method and its applications to rolling element bearing fault diagnosis. Mechanical Systems and Signal Processing, 62-63: 444-459. https://doi.org/10.1016/j.ymssp.2015.03.002
[12] Cherif, B.D.E., Bendiabdellah, A. (2018). Detection of two-level inverter open-circuit fault using a combined DWT-NN approach. Journal of Control Science and Engineering (JCSE), Volume 2018. https://doi.org/10.1155/2018/1976836