Wassila Meddeber*![]() | Benaoumeur Aour
| Benaoumeur Aour![]() | Karim Labadi
| Karim Labadi![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Mobility for disabled individuals is a crucial issue in their daily lives. The navigation system is one of the most commonly employed techniques for smart wheelchairs in the domain of mobile robotic-Maurice Audin, providing them with autonomy and social integration opportunities. Indeed, its simplicity and reliability can bring benefits to the users. This paper deals with intelligent wheelchair navigation through the development of multi-sensor data fusion using a hybrid filter (HF) approach by combining the extended Kalman filter (EKF) and the modified particle filter (PF). This combination overcomes the limitations of each other and leverages their respective strengths to achieve more accurate and robust localization. Indeed, the proposed hybrid filter aims to minimize estimation errors and improve the dynamic localization and navigation system. The applicability and effectiveness of the developed HP approach are demonstrated by simulation, and the results obtained were compared with those found in the literature. It has been found that the mean absolute error (MAE) and the percentage estimation error of the present method are better than those of EKF and both data fusion methods.
smart wheelchair, robotics, navigation, localization, multi-sensors, data fusion, extended Kalman filter, modified particle filter
Recent decades have seen dramatic progress in the development and application of new technologies. Among them, robotics technology is increasingly present in several areas including industry, logistics, mobility, and medicine. Robots can assist humans or mimic human actions in multiple environments. More specifically, robotic assistive devices and mobile robotics, such as smart wheelchairs, have the potential to improve autonomy in the daily lives of individuals with disabilities and the elderly.
Nevertheless, localization of a robotized wheelchair using a particular modified multi-sensor filter is an advanced method for accurately determining the wheelchair's position in its environment. This technique combines the use of multiple sensors to generate environmental data and filtered particles to estimate the wheelchair’s location.
Using and handling a conventional power wheelchair can be a difficult and dangerous task for some people suffering from motor disabilities. In this context, recent research and development deals with smart and autonomous wheelchairs able to compensate for the user’s cognitive skills and visual-perceptual abilities in order to anticipate obstacles and navigate on safe trajectories. Over the past ten years, HandiViz [1], Sysiass [2], Coalas [3], NavChair [4] and European FP7 Radhar [5] are among the projects carried out in this area. In the Sysiass project, EMG and CAMERA sensors were employed. The limitation of this technique is that the sensor system which controls the slowing down and stopping of the wheelchair in front of an obstacle was not sufficiently developed. To avoid collisions, the wheelchair needed to be perfectly aligned. The wheelchair developed by HandiViz incorporates 15 ultrasonic sensors mounted all around it, forming a control system capable of providing seamless trajectory correction during wheelchair navigation. This innovative approach combines user input with obstacle avoidance capabilities, resulting in an efficient and effective method. In the NavChair project, they used GPS, compass, and ultrasonic sensors. The limitation of this technique is the map tracking with a robot and the error caused by imprecise calculation. Due to the limitations of wheelchair dynamics and current sensors, accurate calculation at a distance in the NavChair wheelchair is almost impossible. Another difficulty was that the system could not determine exactly where the robot was on the map and what its orientation was.
The literature reports considerable research and development efforts to design the next generation of intelligent wheelchairs [6]. From a technological point of view, several researchers have used assistive technologies including a collection of sensors (ultrasound, laser, cameras) and computer processing algorithms to develop increasingly smart concepts. Currently, the research topic is taking an important place in the mobile robotics field, by exploiting new technologies and techniques such as human learning, navigational assistance, localization, robot interaction, artificial intelligence, multi-modal sensors, and so on, aiming to adapt the concepts to the user’s disabilities and/or abilities [5].
Despite their apparent success as an emerging solution to improve the daily life of people with disabilities, smart and autonomous wheelchairs present several crucial scientific challenges, for an efficient hybridization and combination of multiple technological solutions and devices [7-9]. More particularly, localization and navigation represent the fundamental problems during the design and development of smart mobile robots [10, 11]. The main technical question concerns the exploitation of a set of devices and sensors with efficient data fusion and computer processing algorithms to provide reliable self-dynamic localization and/or interaction with users useful to perform successful navigation in the case of autonomous or semi-autonomous operating modes [12, 13]. Localization issues for smart wheelchairs are particularly important, as high accuracy and reliability are essential for user safety and efficiency [14]. These wheelchairs are often used indoors, in homes, hospitals, shopping centers, and so on. Indoor localization can be complicated due to the diversity of structures and obstacles present. As a result, location accuracy is crucial to avoid collisions with obstacles, ensure user safety, and enable smooth navigation [15]. Location errors can have serious consequences. Smart wheelchairs need to adapt to constantly changing environments [16, 17]. Some smart wheelchairs are designed for outdoor use, which involves different localization challenges, particularly taking into account weather conditions, uneven terrain, and unique obstacles [18].
Localization is one of the most important tasks in enabling a mobile robot to achieve total autonomy. In the approach of Gasparri et al. [19], a new global localization strategy is recommended. By utilizing this technique, a robot can effectively establish its position or readjust its location in the case of recovery from a failure in pose tracking. The algorithm presented employs a hybrid approach. Initially, a particle filter is utilized to generate conjectures regarding the potential pose, under the assumption that no motion is permitted to prevent collisions. Afterward, secure paths are planned and carried out to minimize the remaining uncertainties, though the hypotheses are checked and confirmed by a series of parallel extended Kalman filters. The originality of this method lies in its ability to generate pose assumptions without relying on any feature-based information. Therefore, there is no longer a need for a landmark-based representation of the surroundings to execute the algorithm. The second hybrid approach used in the literature is localization with wireless sensor networks (WSN), as proposed by Achroufene et al. [20]. This new technique is based on two key elements. Firstly, it utilizes the theory of belief functions to effectively handle the imperfections associated with residual sum of squares (RSS) measurements as well as the credibility of their sources. Secondly, it incorporates a more accurate modeling of the disparity of RSS measurements caused by intrusion and attenuation phenomena, which significantly affect signal propagation within indoor settings.
The Extended Kalman Filter (EKF) is an extensively used estimation algorithm for nonlinear objects. It is highly appreciated for its ease of implementation, fast execution, and generally reliable estimation results. Nevertheless, the Extended Kalman Particle Filter deviates from the traditional PF algorithm. In this modified approach, the particles in the extrapolation step are not randomly selected from the transition mode, but from the probability density function (PDF) computed using the EKF technique [21]. By combining the Kalman filter for initial prediction and the particle filter for updating and correction, this hybrid algorithm can take advantage of the benefits of each algorithm. The Kalman filter provides a fast and efficient initial estimate, while the particle filter allows non-linearities and non-Gaussian uncertainties to be handled more flexibly. Nevertheless, it should be emphasized that the exact design of the hybrid algorithm will depend on the application specifications and the characteristics of the mobile robot localization system. This approach was chosen for its low cost and effectiveness in improving localization error, as it does not require many sensors or external sensors such as beacons.
In this context, this work focuses on localization and navigation issues in smart wheelchairs through the development of a multi-sensor data fusion using a Hybrid Filter (HF) based approach. The proposed method based on the HF aims, to minimize estimation errors and improve the localization and navigation systems. The applicability and effectiveness of the developed and implemented technique are highlighted through simulation, and the results obtained in an indoor environment are compared with those in the literature.
After the above introduction to the research background, the subsequent sections of this manuscript are structured as follows. Section 2 provides an overview of the localization and navigation problems in the mobile robotics area, and associated studies are discussed. Section 3 deals with the system under consideration and its kinetic modeling. Section 4 focuses on multi-sensor data fusion using the Hybrid Filter, aiming to deliver a consistent assessment of the robot’s localization. Section 5 is dedicated to studying the efficiency of the developed approach through simulation, presenting a comparison and discussion of the results obtained. Finally, the last section provides a conclusion and some perspectives.
2.1 Localization and navigation challenges
Today, smart and autonomous mobile robots provide several applications in industrial manufacturing, military operations, logistic organizations, competition games, space exploration, medical and social science, etc. They are required to assist explorers, researchers, industrials, and more generally people to perform some critical and/or special activities, including inspection, exploration, transportation, and more specifically, to improve the autonomy of people with disabilities using smart wheelchairs. For all these reasons and by exploiting current technological advances, the topic of mobile robots continues to receive increasing attention in the research and development community.
Localization and navigation issues can be considered as the major challenges of this research area when talking about the development and design steps of a mobile robot. During the real-time perception phase, the robot extracts data and information from its multiple sensors (camera, ultrasonic, laser, RFID, etc.) with the aim of knowing the robot’s position in motion. The multi-sensor and robot’s odometry fusion approaches strive to offer an optimal approximation of the robot’s location (p = (x, y, θ)T). The location information, which evolves over time, constitutes crucial input data to be processed and exploited by the navigation system for motion and mapping control. To avoid estimation errors induced by technology and/or associated methods, efficient processing techniques and algorithms are needed to ensure reliable localization.
2.2 Localization and navigation approaches
In the literature, several approaches are proposed to support the localization and navigation strategies for positioning mobile robots.
• First of all, the robot’s localization is usually considered as a probabilistic and multi-sensor fusion issue, considering that the sensor data are influenced by measurement errors. Consequently, according to the literature, the localization can be estimated by using Markov and Bayesian methods [22], Extended Kalman Filters, Particle Filters, Factor graphs, and evolutionary techniques using differential scaling, genetic approaches, and particle swarm optimization [23].
• In the case of outdoor and large environments, where the path configuration alters due to the presence of dynamic obstacles or explicit modifications, localization becomes very complex. In this context, autonomous map-building approaches are proposed aiming to create and modify the environment map automatically by exploiting the latest advancements in computer vision. Readers may refer to the SLAM techniques such as EKF-SLAM [24], UKF-SLAM [25], MCL-SLAM [26], and evolutionary SLAM [27] based approaches.
• More recently, the potential of artificial intelligence such as Neural Networks and Machine Learning has been demonstrated [28, 29]. From another point of view of the literature, several technologies and sensors are exploited and/or combined, leading to precise path estimation and low positioning errors [30]. Various technologies have been adopted, including ultrasonic, laser, sonar, GPS, vision, WiFi, and RFID technologies. In all these cases, sensor data fusion plays a pivotal role in the processing of information obtained from a mobile robot's multiple sensor configurations. Furthermore, the selection of technological solutions is contingent upon the specific domain of application. and must be adapted to the environment of use, which can be indoors (hospitals, housing, offices, etc.) or outdoors (roads, nature, space, etc.), taking into account some specificities or constraints such as users' disability, object dynamics, and operating modes.
For more details on this active research topic, review papers have recently been published covering the smart wheelchair case [6] and the mobile robot case in general [31].
The rest of this work focuses on smart wheelchair localization based on multi-sensor data fusion using Hybrid Filter (HF). The principle, architecture, application, and advantages of the proposed approach are detailed in the subsequent sections. The Hybrid Filter (HF) method aims to reduce the system assessment error and improve the dynamic location of the mobile robot.
2.3 Kalman filter localization
Firstly, the Kalman Filter (KF) is widely regarded as a top-notch algorithm employed in the field of data fusion filtering purposes in several research domains, including mobile robotics [32-34]. Within the basic theory, the KF algorithm is only appropriate for linear systems. However, in many robotic systems, the measurement equations are nonlinear. The nonlinearity can be associated with either the process model, the observation model, or both. Consequently, an Extended Kalman Filter (EKF) using a linearization step is needed in such systems [34]. Basically, the Taylor series approximation is used to extend models of nonlinear functions in the Extended Kalman Filter. It involves estimating the state and linearizing the model in the first order. The assessment of a noisy measurement of the nonlinear system location is commonly achieved using the
EKF algorithm. It is based on the assumption that the measurement noises are Gaussian and temporally uncorrelated, with zero mean and known variance. The general localization diagram is shown in Figure 1.
Figure 1. General EKF diagram for the localization
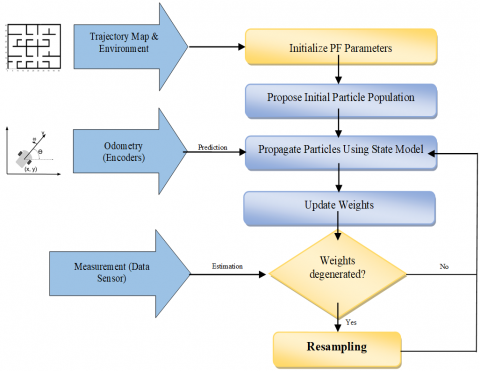
Figure 2. General PF diagram for the localization
As shown in the diagram, the position prediction applies the kinematic model with a Gaussian error to robot odometry. From the sensor data (camera, ultrasonic, laser, RFID, etc.), the robot extracts different information about the environment (doors, lines, etc.) in order to generate a perception of its position. The estimation (data fusion) is performed by the EKF algorithm by exploiting the best matching between the predicted and perceived positions. In other words, the prediction and update are combined to reduce the average square error of the state estimation.
Unfortunately, the performance of an extended Kalman filter (EKF) can be significantly compromised due to the inherent linearization errors present in its specification, especially in cases where the signal-to-noise ratio is low and the estimation of noise variances has been inadequate [35]. In this context, to increase the filtering process and improve the localization robustness of the EKF method, a combination with the Particle Filter method is proposed in this work. As a successive iteration of the Monte Carlo approaches [36], the Particle Filter (PF) method is proposed to solve the nonlinear filtering problem.
2.4 Particle filter localization
To assess the position and orientation of the moving robot, the approach utilizes a Particle Filter algorithm to depict the probable states of the robot in motion. The states are denoted by a collection of points referred to as "particles". Generally, the algorithm commences by employing a uniform distribution to generate the particles across the configuration space, assuming that the robot can initially be at any point within that space [37, 38]. The particles are resampled using recursive Bayesian estimation, which takes into account the correlation between the actual sensed data and the predicted state whenever the robot detects something. Finally, the particles ought to converge towards the current location of the robot [39, 40]. The general PF localization diagram is illustrated in Figure 2.
The Monte Carlo (PF) localization method has a drawback when the particles propagate randomly and converge to an erroneous state, which makes the particles move away from the real state of the robot and are eliminated by the next iteration. As a result, the number of particles will have to be lower, and with a reduced number, we will not be able to determine the correct location.
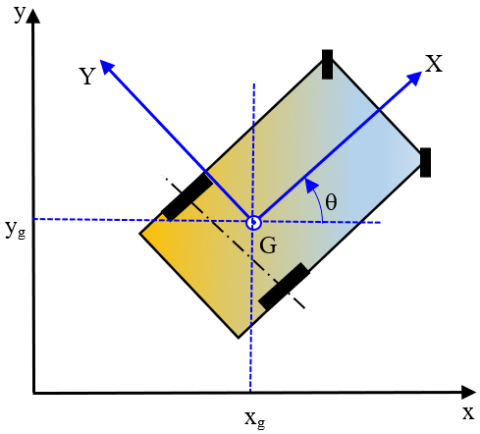
First, we present the kinematic model representing the navigation system behavior of a considered wheelchair, illustrated in Figure 3. Its position is described by a three-dimensional vector p = (x, y, θ)T, where (x, y) indicates the wheelchair's location in the global frame of the 2D map and θ represents its orientation. The wheelchair's odometry relies on motion sensor data to estimate the alterations in position with respect to the wheelchair's starting point as time progresses.
It should be noted that the laser sensor plays a key role in estimating the odometry required to localize the intelligent wheelchair. Odometry is the method used to estimate a robot's position and orientation based on measurements of the movements made by its wheels or actuators. However, due to inherent errors and uncertainties, odometry alone is often not sufficient to acquire a precise estimation of the robot's location. Laser sensors act as an external source of data, providing direct environmental measurements to improve the precision of this estimate.
The position is approximated by the successive elementary displacements supplied by encoders. Based on the wheelchair kinematics model (Figure 3), the linear (vl) and angular (vθ) velocities are given by:
Figure 3. Kinematic model of the wheelchair
$\left\{\begin{array}{l}v_l=\frac{r \cdot\left(v_d+v_g\right)}{2} \\ v_\theta=\frac{r \cdot\left(v_d-v_g\right)}{2}\end{array}\right.$ (1)
where, $v_d$ and $v_g$ are the speeds of the right and left wheels respectively.
The elementary displacements from an instant k to an instant k +1 are respectively given by the following equations:
$\left\{\begin{array}{l}x_{k+1}=x_{k+1}+v_l \cdot \Delta_t \cdot \cos \left(\theta_k\right) \\ y_{k+1}=y_{k+1}+v_l \cdot \Delta_t \cdot \sin \left(\theta_k\right) \\ \theta_{k+1}=\theta_{k+1}+v_g \cdot \Delta_t\end{array}\right.$ (2)
Every time the robot changes its position, the particles also adjust their positions to anticipate the robot's new state following the movement. The particles undergo resampling through a recursive Bayesian estimate whenever the robot detects an object, i.e., the correlation between the real detected data and the expected result. In the end, the particles ought to come together at the actual location of the robot.
Consider a robot equipped with an internal map of its surroundings. When the robot is in motion, it requires the ability to ascertain its position within this map. The determination of its position and rotation using sensor observations is called robot location.
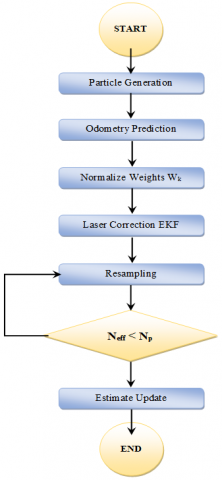
Due to the robot's tendency to exhibit unpredictable behavior, it frequently generates numerous random assumptions regarding its forthcoming destination. These assumptions are commonly referred to as particles. Every particle encompasses a comprehensive depiction of a potential forthcoming condition. As the robot perceives its surroundings, it discards the particles that do not align with this perception and generates additional particles that closely resemble the ones exhibiting coherence. Ultimately, it is expected that the majority of the particles will eventually converge at the precise location of the robot. Figure 4 illustrates the Extended Kalman-Particle Filter localization diagram.
Figure 4. Extended Kalman-Particle Filter localization diagram
The assessment standards for measuring the effectiveness of a technique implemented on a data fusion system differ across different problems due to various essential factors, including objective, reliability level, ease of use, runtime, precision, ruggedness, consistency, and coherence [41]. Hence, it is imperative to analyze multiple criteria to assess a data fusion system. Consequently, to assess a technique and substantiate its superior reliability over another, it is necessary to respect these requirements. In this study, we used two widely used fusion performance criteria, namely, the Absolute Error (AE) and the Mean Absolute Error (MAE) which are given by the following expressions:
• Absolute error (AE) in positions:
It represents a series of numerical values that correspond to the absolute value of the disparity between the actual and predicted locations. It increases when the expected and true locations differ, and it will be zero when they are similar. For this criterion, the algorithm that yields the lowest value is the most favored.
$\begin{aligned} & A E_x=\left|x_i-\hat{x}_i\right|, \\ & A E_y=\left|y_i-\hat{y}_i\right|, \quad i=1,2, \ldots, N \\ & A E_\theta=\left|\theta_i-\hat{\theta}_i\right|,\end{aligned}$ (3)
where, $x_i, y_i, \theta_i$ represent the true locations and orientation; $\hat{x_i}, \hat{y_i}, \hat{\theta_i}$ are the predicted locations and orientation.
• Mean absolute error (MAE):
The mean absolute error is determined by taking the average of the absolute error values.
It is given by the following relations:
$\begin{aligned} & M A E_x=\frac{1}{N} \sum_{i=1}^N\left|x_i-\hat{x}_i\right| \\ & M A E_y=\frac{1}{N} \sum_{i=1}^N\left|y_i-\hat{y}_i\right|, \quad i=1,2, \ldots, N \\ & M A E_\theta=\frac{1}{N} \sum_{i=1}^N\left|\theta_i-\hat{\theta}_i\right|\end{aligned}$ (4)
6.1 Determination of the optimum particle number
It should be noted that in the localization process, we used two different filters: the Kalman filter (Bayesian) and the particle filter (probabilistic) to merge the data from both sensors (the odometers and the laser rangefinders) and obtain a better estimate of the particle position. The Kalman filter modifies the divergence of the particles and reduces the estimation error during their movement by increasing the precision and convergence of the filter.
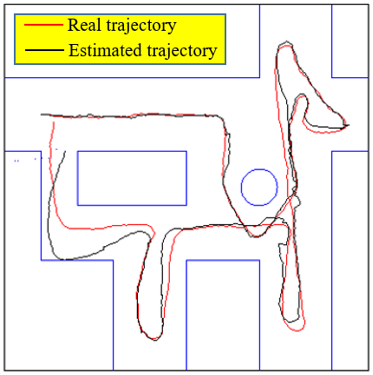
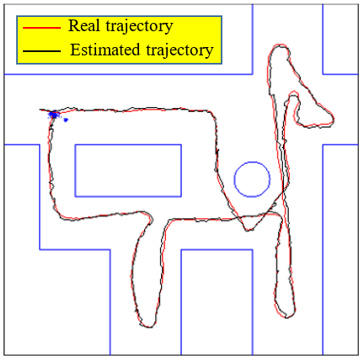
In order to examine the dependability of the suggested technique, simulations were performed with Matlab using the PKF algorithm in a known indoor environment. Four different numbers of particles were tested. The obtained results are shown in Figures 5, 6, 7, and 8. Note that the curve in black is the estimated trajectory, and the one in red is the real trajectory. So to obtain a better localization, it is necessary to reduce as much as possible the error between both curves.
Figure 5. Comparison of the real trajectory and the estimated trajectory by HF approach when N=60 particles
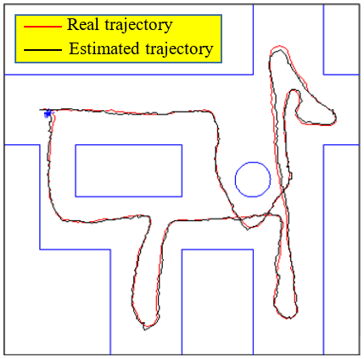
Figure 6. Comparison of the real trajectory and the estimated trajectory by HF approach when N=120 particles
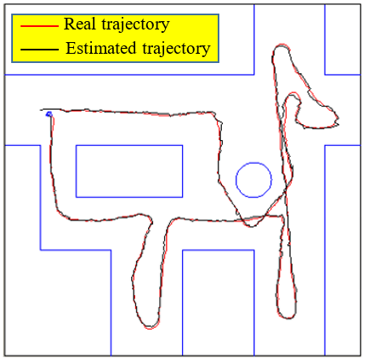
Figure 7. Comparison of the real trajectory and the estimated trajectory by HF approach when N=160 particles
Figure 8. Comparison of the real trajectory and the estimated trajectory by HF approach when N=200 particles
It can be seen that when the number of particles increases, the estimation error decreases, and the estimation curve gets closer to the real curve until N = 200. Beyond this value, the error becomes significant again, and this returns to the duration of the program execution, which becomes important compared to real-time.
6.2 HF approach implementation
The steps for implementing the hybrid approach can be summarized as follows:
|
1. Generation of particles xk with a weight wk for each particle in a random way k=1,...,N particles Selective resampling: Select N particles from the current distribution with weights $\left(w_1, w_2, \ldots, w_N()\right)$. 1. Calculate a resampling threshold (T). 2. Initialize an index i = 1. 3. Initialise a counter j = 0. 4. Repeat until j reaches N: If $w_i \geq T$, copy particle i into the new distribution. If not, select a particle at random from the remaining particles. 2. Prediction of the robot state using the Extended Kalman Filter (EKF). The EKF prediction equation is as follows: $x_k^{(E K F)}=f\left(x_{k-1}^{(E K F)}\right)+w_k^{(E K F)}$ where $x_k^{(E K F)}$ is the estimate of the state at time k using EKF, $f(x_{k-1})$ is the non-linear state transition function, and $w_k^{(E K F)}$ is the process noise. A prediction of the robot state using the particle filter (PF). Each particle corresponds to an assumption regarding the state of the robot, and it evolves according to the transition model of the particle filter. For each particle I, the prediction equation for the PF is as follows: $x_k^{(P F, i)}=f\left(x_{k-1}^{(P F, i)}\right)+w_k^{(P F, i)}$ where $x_k^{(P F, i)}$ is the estimate of the state of particle i at time k using the PF, $f\left(x_{k-1}^{(P F, i)}\right)$ is the nonlinear state transition function for particle i, and $w_k^{(P F, i)}$ is the process noise specific to particle i. The weighted average $x_{hybrid}$ is calculated as follows: $x_{{hybrid}}=w_{K F} \cdot x_{K F}+w_{P F} \cdot x_{P F}$ where: $x_{hybrid}$ is the hybrid estimation of the mobile robot location. $x_{K F}$ is the Kalman filter estimate. $x_{P F}$ is the estimate of the particle filter. $w_{K F}$ is the weight assigned to the Kalman filter $w_{P F}$ is the weight assigned to the particle filter 3. Correction Measure the current position of the robot using the laser sensor. This measurement is noted zk. Update the EKF using this measurement. The equation for updating the EKF is as follows: $x_k^{(E K F)}=x_k^{(E K F)}+K_k^{(E K F)} \cdot\left(z_k-h\left(x_k^{(E K F)}\right)\right)$ where $K_k^{(E K F)}$ is the Kalman gain matrix, zk is the measurement, and $h\left(x_k^{(E K F)}\right)$ is the nonlinear observation function. 4. Resampling To eliminate the least relevant particles. After resampling, we will have the final group of particles representing the position of the robot. 5. k=k+1 repeat step 2 or end of the algorithm. |
6.3 Performance evaluation
In this subsection, a simulation was conducted to determine the location based on x, y, and θ.
The simulation employs the subsequent parameters:
- Sampling period: $\Delta \mathrm{t}=0.1 \mathrm{~s}$.
- Initial state vector $X_0=\left[\begin{array}{lll}0 & 0 & 0\end{array}\right]^T$
In order to show the influence of measurement noise on the position and orientation of the wheelchair (x, y, and θ), three different cases have been studied. The robot position has been simulated with two encoders alone, then with the laser rangefinder, and finally with the EKF fusion filter.
The position estimation error of the wheelchair was calculated as the average of the errors between the actual positions and those estimated by the particles. Estimation methods are often used to obtain this information, for example, the well-known odometry method, where the data from the encoders is used to calculate the linear and angular velocities, and by using the robot kinematic model, it is possible to estimate the position and orientation, which are represented according to the coordinates x, y, and the orientation θ.
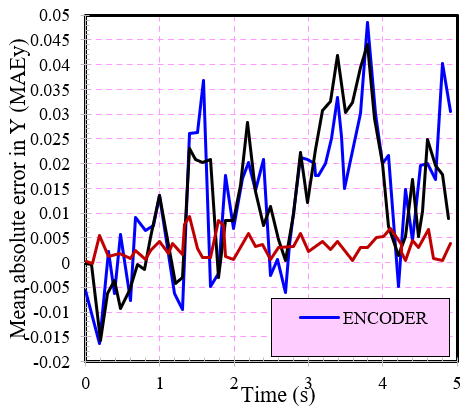
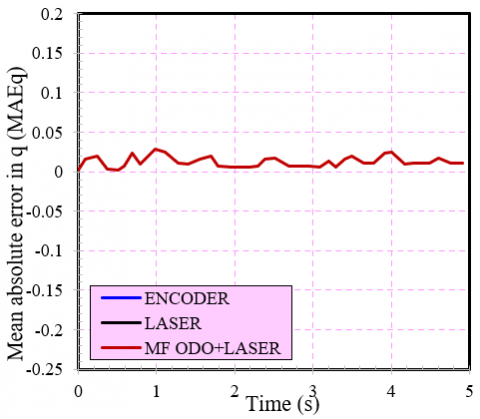
Figures 9, 10, and 11 represent, respectively, the variation of the mean absolute errors in positions and orientation (x, y, and θ) as a function of time. It can be observed that the curves of the encoder measurements (odometry) exhibit oscillations with larger amplitudes, whereas the curves of the present hybrid fusion approach are stable with smaller amplitude oscillations. This indicates that the unstable data is a result of odometry errors. These errors can be rectified using the laser rangefinder measurement data.
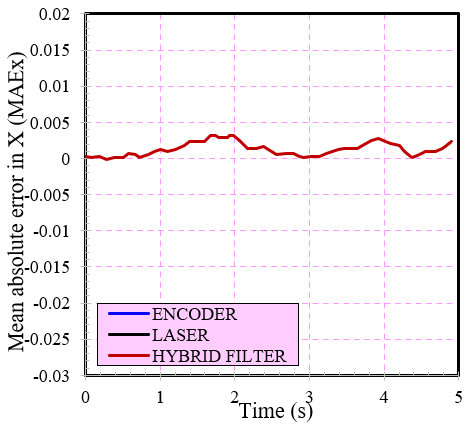
Figure 9. Variation of the mean absolute errors in x as a function of time
Figure 10. Variation of the mean absolute errors in y as a function of time
Figure 11. Variation of the mean absolute errors in θ as a function of time
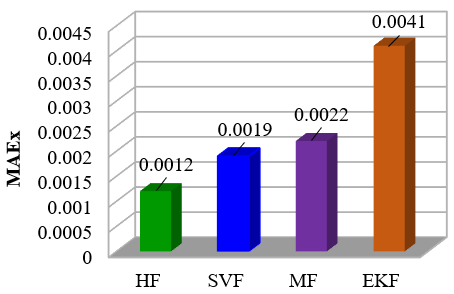
Figure 12. Mean absolute error in x
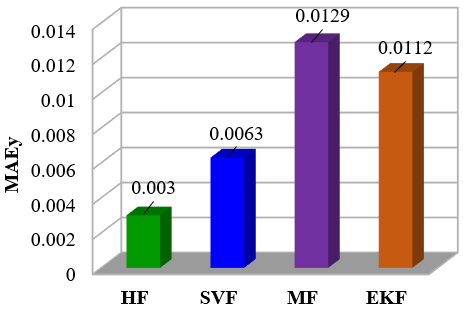
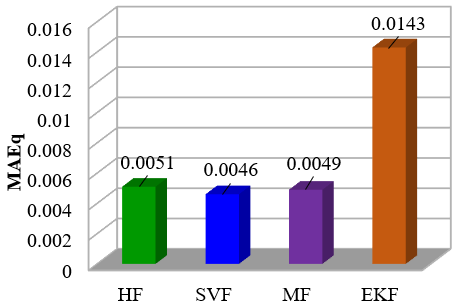
Figures 12, 13, and 14 illustrate a comparison between the mean absolute errors in position and orientation (x, y, and θ) provided by HF, state vector fusion (SVF), measurement fusion (MF), and the EKF method. It can be seen that the Hybrid Filter (HF) is more accurate compared to EKF and the other data fusion methods, confirming the effectiveness and reliability of the proposed approach compared to those in the literature.
Figure 13. Mean absolute error in y
Figure 14. Mean absolute error in θ
In this work, a hybrid localization system has been presented for the autonomous navigation of an intelligent wheelchair in order to enhance the level of service for individuals with reduced mobility and to offer them a robust, efficient, and secure mobile platform. Indeed, localization is an essential process for the autonomous navigation of automatic systems. To this end, a data fusion approach has been proposed to solve the constraints of nonlinearity and improve the accuracy of the estimation error in a known indoor environment in real-time. Indeed, this represents a new localization approach for a wheelchair-type mobile robot. This latter is based on a hybrid data fusion filter called HP which combines the particle filter PF and the extended Kalman filter EKF, using odometer-like sensors and a laser rangefinder.
To check the efficiency of the proposed method, simulations were carried out using Matlab. The results show that our hybrid approach gives better results on localization accuracy compared to those in the literature. In fact, the average percentage reduction in mean absolute error is around 53% compared to SVF, 136% compared to MF, and 416% compared to EKF.
In future work, we plan to apply the proposed approach to patients using a 3D camera and different types of sensors.
[1] Babel, M., Pasteau, F., Guégan, S., Gallien, P., Nicolas, B., Fraudet, B., Achille-Fauveau, S., Guillard, D. (2015). HandiViz project: Clinical validation of a driving assistance for electrical wheelchair. IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO), Lyon, France, pp. 1-6. https://doi.org/10.1109/ARSO.2015.7428213
[2] Kokosy, A., Floquet, T., Howells, G., Hu, H., Pepper, M., Donz, C. (2012). SYSIASS? An intelligent powered wheelchair. International Conference on Systems and Computer Science (ICSCS2012), Lille, France.
[3] Li, R., Wei, L., Gu, D., Hu, H., McDonald-Maier, K. (2013). Multi-layered map based navigation and interaction for an intelligent wheelchair. Proc. of IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, pp. 115-120. https://doi.org/10.1109/ROBIO.2013.6739445
[4] Levine, S.P., Bell, D.A., Jaros, L.A., Simpson, R.C., Koren, Y., Borenstein, J. (1999). The navchair assistive wheelchair navigation system. IEEE Transactions on Rehabilitation Engineering, 7(4): 443-451. https://doi.org/10.1109/86.808948
[5] Demeester, E., Vander Poorten, E., Huntemann, A., De Schut, J. (2012). Wheelchair navigation assistance in the FP7 project radhar: Objectives and current state. Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Workshop on Navigation and Manipulation Assistance for Robotic Wheelchairs, 12 October 2012, Vilamoura, Portugal.
[6] Leaman, J., La, H.M., (2017). A comprehensive review of smart wheelchairs: Past, present, and future. IEEE Transactions on Human-Machine Systems, 47(4): 486-499. https://doi.org/10.1109/THMS.2017.2706727
[7] Dahmani, M., Chowdhury, M.E.H., Khandakar, A., Rahman, T., Al-Jayyousi, K., Hefny, A., Kiranyaz, S., (2020). An intelligent and low-cost eye-tracking system for motorized wheelchair control. Sensors, 20(14): 3936. https://doi.org/10.3390/s20143936
[8] Lankenau, A., Röfer, T. (2001). A versatile and safe mobility assistant. IEEE Robotics & Automation Magazine, 8(1): 29-37. https://doi.org/10.1109/100.924355
[9] Prassler, E., Scholz, J., Fiorini, P. (2001). A robotics wheelchair for crowded public environment. IEEE Robotics Automation Magazine, 8(1): 38-45. https://doi.org/10.1109/100.924358
[10] Bourhis, G., Horn, O., Habert, O., Pruski, A. (2001). The VAHM project: Autonomous vehicle for people with motor disabilities. IEEE Robotics and Automation Magazine, Special Issue on Wheelchairs in Europe, 7(1): 21-28.
[11] Rebsamen B., Burdet, E., Guanet, C., Zhang, H., Teo, C.L., Zeng, Q., Ang, M., Laugier, C. (2006). A brain controlled wheelchair based on P300 and path guidance. The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, 2006. BioRob 2006., Pisa, Italy, pp. 1101-1106. https://doi.org/10.1109/BIOROB.2006.1639239
[12] Mazo, M., Garcı́a, J.C., Rodrı́guez, F.J., Ureña, J., Lázaro, J.L., Espinosa, F. (2000). Integral system for assisted mobility. Information Sciences, 129(1-4): 1-15. https://doi.org/10.1016/S0020-0255(00)00065-7
[13] Wang, Y., Chen W.D., Wang, J.C. (2011). Hybrid map-based navigation for intelligent wheelchair. 2011 IEEE International Conference on Robotics and Automation, Shanghai, pp. 637-642. https://doi.org/10.1109/ICRA.2011.5980116
[14] Zhang, X., Li, J., Jin, L., Zhao, J., Huang, Q., Song, Z., Liu, X., Luh, D.B. (2023). Design and evaluation of the extended FBS model based gaze-control power wheelchair for individuals facing manual control challenges. Sensors, 23(12): 5571. https://doi.org/10.3390/s23125571
[15] Ravankar, A., Ravankar, A.A., Kobayashi, Y., Hoshino, Y., Peng, C.C. (2018). Path smoothing techniques in robot navigation: State-of-the-art, current and future challenges. Sensors, 18(9): 3170. https://doi.org/10.3390/s18093170
[16] Leaman, J., and La, H.M., (2020). The intelligent power wheelchair upgrade kit. In 2020 Fourth IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, pp. 416-421. https://doi.org/10.1109/IRC.2020.00074
[17] An, Y., Han, T., Zhao, H., Qiu, S. (2021). Simulation analysis on motion stability of smart wheelchair. Journal of Physics: Conference Series, 1873: 012045. https://doi.org/10.1088/1742-6596/1873/1/012045.
[18] Muangmeesri, B., Wisaeng, K. (2022). IoT-based discomfort monitoring and a precise point positioning technique system for smart wheelchairs. Applied System Innovation, 5(5): 103. https://doi.org/10.3390/asi5050103
[19] Gasparri, A., Panzieri, S., Pascucci F., Ulivi, G. (2007). A hybrid active global localisation algorithm for mobile robots. Proceedings IEEE International Conference on Robotics and Automation, Rome, Italy, pp. 3148-3153. https://doi.org/10.1109/ROBOT.2007.363958
[20] Achroufene, A., Amirat, Y., Chibani, A. (2019). RSS-based indoor localization using belief function theory. IEEE Transactions on Automation Science and Engineering, 16(3): 1163-1180. https://doi.org/10.1109/TASE.2018.2873800
[21] Hao, Y., Xu, A., Sui, X., Wang, Y. (2018). A modified extended Kalman filter for a two-antenna GPS/INS vehicular navigation system. Sensors, 18(11): 3809. https://doi.org/10.3390/s18113809
[22] Borenstein, J., Everett, B., Feng, L., (1996). Navigating Mobile Robots: Systems and Techniques. A.K. Peters, Ltd., Wellesley, MA.
[23] Gordon, N.J., Salmond, D.J., Smith, A.F.M. (1993). Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proceedings F Radar and Signal Processing, 140(2): 107-113. https://doi.org/10.1049/ip-f-2.1993.0015
[24] Gao, X., Li, J., fan, L., Zhou, Q., Yin, K., Wang, J., Song, C., Huang, L., Wang, Z. (2018). Review of wheeled mobile robots’ navigation problems and application prospects in agriculture. IEEE Access, 6: 49248-49268. https://doi.org/10.1109/ACCESS.2018.2868848
[25] Derradji, N., Bousbia-Salah, M., Bettayeb, M. (2018). Multi-sensor data fusion for wheelchair position estimation with unscented Kalman filter. International Journal of Automation and Computing, 15(2): 207-217. https://doi.org/10.1007/s11633-017-1065-z
[26] Kim, T.G., Ko, N.Y., Kim, K. (2011). Experiments and analysis of MCL based localization for mobile robot navigation. 2011 Second International Conference on Intelligent Systems, Modelling and Simulation, Phnom Penh, Cambodia, pp. 221-227. https://doi.org/10.1109/ISMS.2011.43
[27] Karpov, V.E., Malakhov, D.G., Moscowsky, A.D., Rovbo, M.A., Sorokoumov, P.S., Velichkovsky, B.M., Ushakov, V.L. (2019). Architecture of a wheelchair control system for disabled people: Towards multifunctional robotic solution with neurobiological interfaces. Современные технологии в медицине, 11(1 (eng)): 90-100. https://doi.org/10.17691/stm2019.11.1.11
[28] Sarlin, P., Debraine, F., Dymczyk, M., Siegwart, R., Cadena, C. (2018). Leveraging deep visual descriptors for hierarchical efficient localization. In Proceedings of the 2nd Conference on Robot Learning, pp. 456-465.
[29] Valada, A., Radwan, N., Burgard, W. (2018). Deep auxiliary learning for visual localization and odometry. 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia, pp. 6939-6946. https://doi.org/10.1109/ICRA.2018.8462979
[30] Gao, X., Xiao, T., Bai, C., Zhang, D., Zhang, F. (2022). Anderson acceleration for on-manifold iterated error state Kalman filters. IEEE Robotics and Automation Letters, 7(4): 12243-12250. https://doi.org/10.1109/LRA.2022.3214056
[31] Panigrahi, P.K., Bisoy, S.K. (2021). Localization strategies for autonomous mobile robots: A review. Journal of King Saud University-Computer and Information Sciences, 34(8): 6019-6039. https://doi.org/10.1016/j.jksuci.2021.02.015
[32] Kalman, R.E. (1960). A new approach to linear filtering and prediction problems. Journal of Basic Engineering, 82(1): 35-45. https://doi.org/10.1115/1.3662552
[33] Travis, W., Simmons, A.T., Bevly, D.M. (2005). Corridor navigation with a LiDAR/INS Kalman filter solution. IEEE Proceedings. Intelligent Vehicles Symposium, 2005., Las Vegas, NV, USA, pp. 343-348. https://doi.org/10.1109/IVS.2005.1505126
[34] Bulut, Y., Vines-Cavanaugh, D., Bernal, D. (2011). Process and Measurement Noise Estimation for Kalman Filtering. In: Proulx, T. (eds) Structural Dynamics, Volume 3. Conference Proceedings of the Society for Experimental Mechanics Series. Springer, New York, NY. https://doi.org/10.1007/978-1-4419-9834-7_36
[35] Jahromi, B.S., Tulabandhula, T., Cetin, S. (2019). Real-time hybrid multi-sensor fusion framework for perception in autonomous vehicles. Sensors, 19(20): 4357. https://doi.org/10.3390/s19204357
[36] Wolcott, R.W., Eustice, R.M. (2015). Fast LIDAR localization using multiresolution Gaussian mixture maps. In 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, pp. 2814-2821. https://doi.org/10.1109/ICRA.2015.7139582
[37] Massardi, J., Gravel, M., Beaudry, E. (2019). Error-tolerant anytime approach to plan recognition using a particle filter. International Conference on Automated Planning and Scheduling (ICAPS), 29(1): 284-291. https://doi.org/10.1609/icaps.v29i1.3490
[38] Ranganathan, A., Dellaert, F. (2006). A Rao–Blackwellized particle filter for topological mapping. Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006., Orlando, FL, USA, pp. 810-817. https://doi.org/10.1109/ROBOT.2006.1641809
[39] Meddeber, W., Touati, Y., Ali-Cherif, A. (2017). Mobile robot localization based on multi-sensor model for assistance to displacement of people with reduce mobility. International Journal of New Computer Architectures and Their Applications, 7(1): 14-17. http://dx.doi.org/10.17781/P002286
[40] Sim, R., Little, J.J. (2006). Autonomous vision-based exploration and mapping using hybrid maps and Rao-Blackwellised particle filters. 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, pp. 2082-2089. https://doi.org/10.1109/IROS.2006.282485
[41] Li, X., Zhao, Z. (2006). Evaluation of estimation algorithms part I: Incomprehensive measures of performance. IEEE Transactions on Aerospace and Electronic Systems, 42(4): 1340-1358. https://doi.org/10.1109/TAES.2006.314576