Anne Gowda Aleri Byregowda*![]() | Babu Nallur Venkateshappa
| Babu Nallur Venkateshappa![]() | Puttamadappa Cheluvegowda
| Puttamadappa Cheluvegowda![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Massive multiple-input multiple-output (MIMO) antenna arrays pose significant challenges in terms of accuracy, efficiency and computational complexity in direction-of-arrival (DOA) estimation, particularly in fifth-generation (5G) and beyond fifth-generation (B5G) networks. Current DOA estimation methods, including cluster-based, spatial-temporal, and machine-learning approaches, struggle in dynamic and noisy environments, incurring inaccuracy in DOA estimation and substantial computational demands. To overcome these issues, this research work introduces a Sparse Bayesian Least Squares Regression (SBLSR) model designed explicitly for massive MIMO systems, which employs an advanced least squares regression technique. Unlike existing sparse Bayesian models or regression-based estimators, SBLSR introduces an adaptive probabilistic framework that iteratively adjusts regression weights for dynamic noise conditions, achieving near-Cramer-Rao lower bounds (CRLB) accuracy with significantly lower complexity. By combining Bayesian probabilistic modelling with least squares regression, the SBLSR significantly enhances estimation accuracy, particularly in environments with high levels of noise. Finally, the simulation results indicate that the proposed SBLSR method improves DOA estimation accuracy and reduces root mean square error (RMSE) values for various signal-to-noise ratio (SNR) limits when compared to existing approaches.
direction-of-arrival (DOA), massive multiple-input multiple-output (MIMO), least squares regression, sparse Bayesian learning, root mean square error (RMSE)
With the rapid expansion of the Internet of Things (IoT), emerging applications such as augmented reality (AR), smart cities, smart farming, and autonomous driving assistance systems (ADAS) have become increasingly prevalent [1]. These applications require low-latency, high-precision service delivery, which traditional mobile cloud-based network architectures struggle to achieve due to inherent network delays [2]. To address these challenges, beyond fifth-generation (B5G) networks, leverage the capabilities of mobile edge computing (MEC) to enhance energy efficiency and enable real-time processing, particularly in highly dynamic user environments [3]. In mission-critical applications, such as forest fire monitoring and flash flood disaster management in urban and hilly regions, the integration of edge servers and uncrewed aerial vehicles (UAVs) plays an important role in improving disaster response efficiency. Effective tracking and localization of UAVs are, therefore, essential for innovative rural-urban disaster management applications [4].
In recent years, significant research has been dedicated to sensor array-based direction of arrival estimation for target localization [5]. Massive multiple-input multiple-output (MIMO) radars offer substantial advantages in this domain, as they enable direction-of-arrival (DOA) estimation without requiring additional range estimation [5, 6]. A multi-kernel non-negative sparse Bayesian learning (MK NNSBL) with GWO-based antenna reconfiguration on MRA improves DOA estimation accuracy and reduces root mean square error (RMSE) in sparse MIMO systems [7]. However, despite these benefits, existing massive MIMO schemes face considerable challenges, including high computational overhead and the need for efficient exploitation of channel sparsity in multi-antenna systems. Accurate DOA estimation is essential for obtaining channel state information (CSI) in massive MIMO networks [8]. Therefore, there is an urgent need for enhanced DOA estimation techniques that not only improve prediction accuracy under low signal-to-noise ratio (SNR) conditions [9] but also reduce computational complexity [9, 10].
Various techniques have been suggested to address the direction of the arrival estimation problem, including subspace-based techniques, which are widely recognized for their high-resolution capabilities [11]. Among these, the Multiple Signal Classification (MUSIC) algorithm has been extensively utilized due to its effective eigen decomposition and super-resolution capability of the spatial covariance matrix [12]. MUSIC enables high-precision DOA estimation, dimensionality reduction, and correlation knowledge extraction. However, its high computational complexity limits its applicability in real-time scenarios [13], particularly for multi-dimensional DOA estimation. Traditional DOA estimation methods typically assume a uniform white Gaussian noise model, where the noise covariance matrix is a scaled identity matrix [14]. However, in practical implementations, non-uniform noise arises due to mutual coupling effects, antenna imperfections, and inconsistencies in the receive channel, which significantly degrade target localization performance [14, 15]. To mitigate this, various methods have been proposed to estimate and compensate for non-uniform noise [16], including iterative and non-iterative techniques. A clustering-based sub-aperture approach is proposed to mitigate near-field effects in large MIMO radar arrays, significantly reducing calibration effort while maintaining far-field-like accuracy [17]. While iterative methods enhance accuracy by estimating noise power and refining the signal subspace, non-iterative approaches provide an alternative by identifying multiple directions without convergence constraints [18].
Although subspace-based approaches generally achieve acceptable estimation accuracy while maintaining a manageable computational load, their effectiveness is influenced by SNR levels and the number of snapshots. Recently, sparse reconstruction (SR) techniques have been introduced in array signal processing to enable high-resolution DOA estimation using fewer measurements [19]. Since the DOAs of multiple targets exhibit spatial sparsity, solutions are typically derived by minimizing measurement errors. However, due to the NP-hard nature of this optimization problem, existing methods rely on convex relaxation techniques, which still impose a high computational overhead [20].
References [14, 15] presented a comprehensive review of recent studies on parameter estimation and direction-of-arrival estimation techniques, with a focus on signal processing, radar systems, and MIMO/mm-wave beyond fifth-generation (B5G) wireless communications. Deep learning-enhanced MUSIC [21] and robust ℓ₀-norm-based matrix completion [22] approaches have been proposed to improve DOA estimation and target localization accuracy under extreme SNR and impulsive noise conditions, respectively. Sun et al. [23] proposed an estimation strategy leveraging a frequency-ranging and adaptive communication decoupling scheme to enhance predictive accuracy while reducing computational complexity. However, its adaptability to highly dynamic environments and integration with sensor networks require further investigation. Similarly, Wang et al. [24] introduced a co-array tensor decomposition system for MIMO radar-based communications, improving estimation accuracy. While effective, the model’s computational complexity may pose challenges for real-time applications. Li et al. [25] developed a compressed Parallel Factor Analysis (PARAFAC)—based approach for parameter estimation in mm-wave massive MIMO systems, optimizing spectral efficiency and estimation accuracy while minimizing hardware requirements. Pavel and Zhang [26] addressed DOA estimation for uncorrelated and mixed coherent signals, demonstrating improved accuracy in complex environments. Nevertheless, real-world implementations require adaptive strategies for practical deployment.
Xu et al. [27] proposed a spatial-aware feature association algorithm for DOA estimation and tracking integrated sensing and communication (ISAC)-enabled massive MIMO-OFDM networks. The algorithm enhances real-time estimation accuracy, yet its robustness in highly dynamic or noisy environments remains a concern. Similarly, Liu et al. [28] introduced a joint-array segmentation and beamforming prototype to improve DOA estimation in ISAC systems. While reducing interference, the model assumes ideal hardware conditions, necessitating adaptive designs for practical applications. Dakulagi et al. [29] presented the Coherent and Uncorrelated Signal Estimation Tensor Decomposition (CUSE-TD) algorithm, which enhances signal detection accuracy for both coherent and uncorrelated signals. However, its scalability for large datasets and real-time implementations requires further optimization. Shu et al. [30] introduced Heterogeneous Hybrid Analog-Digital (H2AD) machine learning techniques to mitigate phase ambiguity in DOA estimation for hybrid massive MIMO systems, achieving higher accuracy in complex environments. However, the method’s reliance on ideal conditions limits its applicability in real-time mobile scenarios. Mylonakis et al. [31] introduced a deep convolutional neural network (CNN) for three-dimensional (3D) DOA estimation, demonstrating superior accuracy in vehicular environments. Despite its effectiveness, the computational intensity restricts real-time deployment, necessitating optimization for practical use. Meng et al. [32] developed a tensor decomposition-based DOA estimation model utilizing an Electromagnetic Vector Sensor (EMVS) MIMO radar, improving robustness against noise and interference. However, its performance under highly dynamic conditions needs further validation. Chen et al. [33] proposed a CNN-based beam space design for mm-wave systems, enhancing channel estimation accuracy through convolutional signal processing and beamforming. While effective, the approach’s high computational complexity limits its feasibility for large-scale deployments, highlighting the need for hybrid methods to improve efficiency.
Recent studies have advanced DOA estimation techniques across various challenges. Pavel and Zhang [26] developed a method that combines conventional techniques with advanced signal separation for mixed coherent and uncorrelated signals; however, further validation and improvements in robustness are needed. Liu et al. [28] enhanced DOA estimation in ISAC systems through joint array partitioning and beamforming, but its effectiveness across different deployments requires further testing.
Dakulagi et al. [29] introduced the CUSE-TD algorithm for detecting coherent and uncorrelated signals with high precision; however, its complexity limits its real-time application. Shu et al. [30] integrated machine learning into MIMO receivers to resolve phase ambiguity; however, the computational demands pose a challenge for real-time use. Mylonakis et al. [31] employed deep CNNs for 3D DOA estimation in vehicular environments, improving localization but requiring optimization due to high computational costs. Meng et al. [32] applied tensor decomposition to EMVS-MIMO radar data, thereby improving robustness against noise and interference; however, hardware integration remains a challenge. Chen and Vaidyanathan [33] proposed a convolutional beam space approach for mm-wave channel estimation, which is crucial for 5G; however, this approach may be hindered by complexity, potentially limiting its real-time deployment. Recent research in DOA and channel estimation has incorporated cutting-edge methodologies, including machine learning, deep learning, tensor decomposition, and beamforming techniques. These approaches have demonstrated notable improvements in estimation accuracy, robustness, and computational efficiency, addressing key challenges in modern communication and radar systems. However, challenges remain concerning real-time applicability, computational overhead, and robustness under dynamic conditions. Future research is expected to focus on optimizing these techniques for practical deployment, particularly in vehicles, defense, and mm-wave communication applications. Additionally, efforts will be directed toward enhancing the adaptability of these algorithms to real-world conditions, improving computational efficiency, and integrating advanced machine-learning strategies to enhance performance in dynamic and complex environments further.
Despite significant advancements in DOA estimation, existing methods face critical limitations in real-world massive MIMO applications. Traditional algorithms like MUSIC and ESPRIT suffer from sensitivity to noise, high errors and degraded performance under correlated sources or limited snapshots. Sparse recovery techniques such as OMP, while more efficient, often fail to maintain accuracy under high-dimensional noise or lack robustness in dynamic environments. Even state-of-the-art SBL approaches primarily focus on enforcing sparsity but overlook residual error minimization and adaptive modeling of noise. These limitations hinder their applicability in practical 5G/B5G scenarios where real-time performance, noise resilience, and estimation accuracy are paramount. In contrast, our proposed Sparse Bayesian Least Squares Regression (SBLSR) addresses these challenges by combining the advantages of Bayesian inference with a robust regression framework. It adaptively minimizes estimation error while enforcing sparsity through probabilistic relevance weighting, achieving near-optimal accuracy with reduced complexity. This makes SBLSR a highly effective solution for next-generation wireless systems requiring scalable, noise-tolerant DOA estimation. The SBLSR is robust in complex noise environments and supports simulations in massive MIMO radar systems, including both uncorrelated and coherent signals, thereby delivering improved DOA measurement precision for practical deployment.
The primary contributions outlined in this paper can be summarized as follows: Firstly, a hybrid model that integrates a sparse Bayesian model with a least-squares regression model for efficient DOA estimation in massive MIMO systems. Later, the SBLSR minimizes DOA estimation error by considering varied network density and dynamic noise. Lastly, minimizes the node DOA estimation error with minimal computational complexity. Thus, the model can be adapted to support MIMO applications that require improved performance while DOA estimation. Section 2 introduces about the SBLSR method for DOA estimation of MIMO signals.
This section introduces the SBLSR for accurate DOA estimation in massive MIMO systems, specifically addressing the challenges posed by significantly more users B5G networks. The proposed model incorporates a system framework tailored for DOA estimation in massive MIMO environments. A mathematical formulation is presented, integrating a hybrid machine learning approach that combines the Sparse Bayesian probability model with the Least Squares Regression (LSR) model, effectively capturing complex and noisy conditions to represent realistic massive MIMO systems more accurately. Furthermore, an algorithm is introduced to illustrate the operational framework of the SBLSR in estimating DOA within massive MIMO networks.
2.1 System model
This section presents an optimization approach for identifying the signal direction of arrival in massive MIMO 5G environments. For prediction and optimization, consider a MIMO network that consists of S Sensors/radars, where the location of source sensors is previously known and can be used to evaluate the location of a specific targeted node in massive MIMO networks, considering the DOA measurement provided by the sensors. In massive MIMO gateway servers, the base stations gather data related to DOA measurement and evaluate the positions of a specific targeted node. The evaluation of DOA measurement is done using Eq. (1):
$s_j=\left\|y-b_j\right\|_2+w_j, j=1, \ldots, S$, (1)
In Eq - (1), $y \in \mathbb{S}^o$ denotes coordinates of target node in massive MIMO networks, $b_j \in \mathbb{S}^o$ denotes $j^{t h}$ sensors positions obtained through DOA measurement, $w_j$ denotes parameter for evaluating errors during measurement which are independently randomly distributed and identical and $\|\cdot\|_2$ denotes Euclidean-Distance. To model the measurements without noise, this work applies a-sparse Bayesian-aware probabilistic function to measurement error, as evaluated using Eq. (2):
$P(w)=(1-\alpha) \mathcal{O}\left(w ; 0, \sigma^2\right)+\alpha \mathcal{J}(w)$. (2)
In Eq. (2), the DOA measurement error $w$ is modeled as a mixture of two distributions: $\mathcal{O}\left(w ; 0, \sigma^2\right)$, a zero-mean Gaussian distribution with variance $\sigma^2$, and $\mathcal{J}(w)$, which denotes an idealized noise-free measurement modeled as a Dirac delta function centered at zero, indicating no deviation from the true measurement. The parameter in $\alpha \in[0,1]$ represents the proportion of measurements that are assumed to be noise-free. This allows the model to handle both noisy and noise-free measurements. It must be noted that the localization process is not directly dependent on the exact value of $\mathcal{J}(w)$, but it helps emphasize sparsity in noise distribution.
As defined above the Eq. (2) introduces a sparse Bayesian-aware probabilistic model to capture the error distribution in DOA measurements. This model is conceptually related to the spike-and-slab prior, commonly used in Bayesian sparse learning. However, it differs in its formulation and intent. In the standard spike-and-slab model, a Bernoulli-Gaussian mixture prior explicitly governs the inclusion of each coefficient, where the "spike" represents a delta function at zero and the "slab" is a broad Gaussian capturing signal presence. In contrast, our model uses a mixture of a zero-mean Gaussian $\mathcal{O}\left(w ; 0, \sigma^2\right)$ and a noise-free indicator distribution $\mathcal{J}(w)$, controlled by the mixing parameter $\alpha$. Here, $\mathcal{J}(w)$ implicitly represents error-free measurements, enabling the model to distinguish between noisy and clean observations probabilistically.
Sparsity is enforced via the parameter $\alpha$, which denotes the proportion of noise-free measurements. A higher value of $\alpha$ corresponds to stronger belief in sparse noise contamination i.e., that most measurements are clean with only a few corrupted by noise. Unlike the spike-and-slab prior that enforces sparsity in model coefficients, our method applies sparsity in the measurement noise, aiming to enhance robustness in scenarios where only a few sensor readings are significantly corrupted.
In this work, the objective is the quantization of $y$ considering measurements $s_j$, where $j=1, \ldots, S$ and neglect measurements are gathered through noise sensors. Moreover, the sensors whose DOA status is being evaluated have no prior data related to noisy sensors and the measurement distribution in MIMO environments. Furthermore, the measurements in this work are considered positive despite being loud and of poor quality. In the next section, this paper presents the SBLSR for approximating DOA in MIMO environments.
2.2 SBLSR model
As sensor location status in MIMO networks is evaluated considering least-squares bounding [21, 22]. Nevertheless, the current least-squares bounding model has failed to identify the optimal approach for assessing the error caused by noise in measurement data. Hence, this work presents the SBLSR approach, which enhances the least-squares bounding approach for reducing noise in measurement data, as shown in Eq. (3):
$\min _y \sum_{j=1}^S\left(\left\|y-b_j\right\|_2^2-s_j^2\right)^2$. (3)
In Eq. (3), the $\min$ function has been optimized to obtain a minimization bound with the following constraints, as presented in Eq. (4).
$\begin{gathered}\min _{y,} \sum_{j=1}^S\left(\beta-2 b_j^U y+\left\|b_j\right\|^2-s_j^2\right)^2, \\ \text { s.t. }\left\|b_j\right\|^2=\beta .\end{gathered}$ (4)
In this work, $\beta$ achievement is accomplished through optimization in Eq. (4). Moreover, the existing approaches [27, 28] have been established using a noisy distribution, specifically a Gaussian distribution. Furthermore, in Eq. (2), $\alpha$ denotes the deviation of the noise measurement from the accurate noise measurement. Nevertheless, the objective of noise measurement of SBLSR is modelling unidentified noisy distribution, i.e., $\mathcal{J}(w)$ to achieve an adaptive measurement approach - Hence, to determine the optimal localization approach, the Eq. (4) of SBLSR is iteratively evaluated through a regression process, as presented in Eq. (5):
$\mathcal{J}(z, x)=\sum_{j=1}^S x_j\left(\tilde{b}_j^U z-c_j\right)^2+\sum_{j=1}^S \gamma^2 x_j-\ln x_j$ (5)
In Eq. (5), $x \in \mathbb{S}^S$ which denotes weight-vector having $x_j> 0, \forall j$ and $\tilde{b}_j^U, z$ and $c_j$ is achieved using Eqs. (6)-(8), respectively:
$\tilde{b}_j^U=\left[-2 b_j^U \cdots 1\right]$, (6)
$z=[y \cdots \beta]^u$ (7)
$c_j=s_j^2-\left\|b_j\right\|^2$ (8)
Further, the objective of this SBLSR-based DOA measurement approximation approach is minimizing Eq. (5), based on $x$ and $z$ using the following constraints presented in Eq. (9):
$\begin{gathered}\min _{z, x} \mathcal{J}(z, x), \\ \text { s.t. } z^U E z+2 g^t z=0, x_j>0, \forall j,\end{gathered}$ (9)
In Eq. (9), $E$ and $g$ is evaluated using Eqs. (10) and (11), respectively.
$E=\left[\begin{array}{cc}J_o & 0_{o * 1} \\ 0_{1 * 0} & 0\end{array}\right]$ (10)
$g=\left[\begin{array}{c}0_{o * 1} \\ -W\end{array}\right]$. (11)
In Eq. (5), the weights and $z$ are updated using $x_j^{(0)}=1, \forall j$. Also, for every $l^{\text {th }}$ loop for updating $z$. The following optimization approach is used in this work, as presented in Eq. (12):
$\begin{aligned} & z^{(l+1)}=\arg \min \mathcal{J}\left(z, x^{(l)}\right), \\ & \text { s.t } x_j>z^U E z+2 g^U z=0 .\end{aligned}$ (12)
Similar to Eq. (12), the weights are updated for every $l^{t h}$ loop using Eq. (13):
$\begin{gathered}z^{(l+1)}=\arg \min \mathcal{J}\left(z^{(l+1)}, x\right), \\ \text { s. } t \cdot x_j>0, \forall j .\end{gathered}$ (13)
As the optimization model is converted to a convex model, the weights are determined using Eq. (14):
$x_j^{(l)}=\frac{1}{\left(g_j^{(l)}\right)^2+\gamma^2}$, (14)
In Eq. $(14), x_j^{(l)}$ is used to denote $j^{\text {th }}$ diagonal parameter having diagonal weight-matrix $X^{(l)}$-for every $j^{\text {th }}$-loop, where $j=1, \ldots, S$. The $g_j^{(l)}$ in Eq. (14), it is evaluated using Eq. (15):
$g_j^{(l)}=\tilde{b}_j^U z^{(l)}-c_j$. (15)
Furthermore, the Eq. (9) optimization problem can be reformulated in covariance matrix form, as presented in Eq. (16):
$\begin{gathered}\min _z(B z-c)^U X^{(l-1)}(B z-c), \\ \text { s.t } z^U E z+2 g^U z=0,\end{gathered}$ (16)
In Eq. (16), the $B$ and $c$ are evaluated using Eqs. (17) and (18):
$B=\left[\begin{array}{cc}-2 b_1^U & 1 \\ \vdots & \vdots \\ -2 b_S^U & 1\end{array}\right]$, (17)
$c=\left[\begin{array}{c}s_1^2-\left\|b_1\right\|^2 \\ \vdots \\ s_S^2-\left\|b_S\right\|^2\end{array}\right]$, (18)
In Eq. (16), considering $j^{t h}$ iteration with $X^{(l)}, j=1, \ldots, S$, the parameter $x_j^{(l)}$ defines $j^{t h}$ diagonal constraint of sparse Bayesian diagonal weighted covariance matrix $X^{(l)}$. In the next section, the optimization of the parameters and the equation presented are explained through a step-by-step process in the algorithm that follows.
2.3 Algorithm for DOA approximation using SBSLR method
In this section, the complete process of the SBLSR based DOA measurement model in massive MIMO networks is presented in Algorithm 1.
|
Algorithm 1. SBSLR model |
|
|
Input |
Sensor positions $b_j$, measurements $s_j$ for $j= 1, \ldots, S$ convergence threshold $\delta;$ maximum iterations $\mathcal{\mathcal {M}^{ \uparrow}}$ |
|
Output |
Estimated position $x^{(l)}$ |
|
Step 1 |
Start |
|
Step 2 |
Evaluate auxilary variables $E, g, B$ and $c$, from Eqs. (10), (11), (17), and (18). |
|
Step 3 |
Initialize iteration counter $l=1$ and set initial estimates $x_j^{(l)}=1, \forall j$ |
|
Step 4 |
For loop (Repeat until convergence) |
|
Step 5 |
Evaluated $\omega^*=\max \left\{-\left(B^U X^{(l-1)} B\right)_{j^{\prime}} j=1, \ldots, o\right\}$, where $\left(B^U X^{(l-1)} B\right)_j$ is the $j$ -th diagonal element of the matrix product. |
|
Step 6 |
Attain $\omega^*$ as the current optimal perturbation parameter |
|
Step 7 |
Update auxiliary vector $z: z^{(l)}=z\left(\omega^*\right)$ |
|
Step 8 |
Update estimated position $x^{(l)}$ using Eq. (14). |
|
Step 9 |
Converge if $\left\|x^{(l)}-x^{(l)-1}\right\|<\delta$ or $l \geq \mathcal{M}^{\uparrow}$, then terminate. |
|
Step 10 |
Increment l = l + 1 |
|
Step 11 |
Stop |
The parameter $\delta$ is a user-defined small positive scalar which is set to $10^{-4}$ indicating the convergence tolerance for changes in the estimate, $\mathcal{M}{ }^{\uparrow}$ is the maximum number of allowed iterations set to 100 to prevent infinite looping, and $\omega^*$ is chosen to maximize the negative diagonal elements of the matrix term for sparsity-aware regularization. The weighted sparse Bayesian covariance matrix enables the model to converge more quickly with optimal DOA measurement minimization through least squares regression analysis, even in an unknown and complex noisy environment with minimal DOA measurement error, as presented in the simulation study in the next section.
To ensure reproducibility of the proposed SBLSR framework, all simulations were implemented using MATLAB R2018a, with compatibility tested for newer versions up to MATLAB R2023a. This section examines the effectiveness of various methodologies, including the suggested approach, namely SBLSR, and two existing methods, namely CUSE-TD [29] and H2AD [30], in DOA estimation for massive MIMO networks. All methods are compared with baseline Cramer-Rao lower bounds (CRLB) to evaluate the effectiveness of various models. The DOA estimation model that achieves an RMSE value closer to the CRLB is an ideal model for massive MIMO networks. In the simulation setup, the study examines a scenario where a MIMO radar array, consisting of M = 8 to 16 elements, detects three narrowband, uncorrelated signals arriving from randomly distributed directions, following a deployment pattern similar to that in reference [28]. Additionally, five coherent sources are considered, divided into two distinct groups with arrival directions also modelled in alignment with [28]. Among these, one uncorrelated signal and one coherent signal from the first group share the same DOA. This configuration results in the total number of source signals exceeding the array's capacity, leading to variations in signal amplitudes due to fading effects. The ratio SNR ranges from -10 dB to 10 dB. The DOA estimation is performed using the approach outlined in references [28-30], which incorporates the impact of shadowing effects that follow a Gaussian distribution. The DOA error was estimated using RMSE performance metrics defined in Eq. (19)
$R M S E=\sqrt{\frac{1}{M_S} \sum_{i=1}^{M_S}\left\|\hat{A}_i-A_i\right\|^2}$, (19)
In Eq. (19), the parameter $M_S$ Montecarlo simulation size, in this work, the $M_S$ is set between 1000 and $5000, A_i$ and $\hat{A}_i$ represent the actual and estimated outcomes of DOA measurement models, respectively. The parameters for the simulation utilized in this study are presented in Table 1.
Table 1. Simulation parameters
|
Parameter |
Specification |
|
Software Used |
MATLAB 2018 and above |
|
Benchmark Models |
CUSE-TD, H2AD |
|
Antenna Array Size |
8 to 16 elements |
|
SNR Range |
-10 dB to 10 dB |
|
Monte Carlo Iterations |
1000 – 5000 |
|
Performance Metric |
RMSE |
|
Baseline Reference |
CRLB |
|
Signal Types |
Coherent and uncorrelated signals |
3.1 Scenario 1: Varied Montecarlo iteration
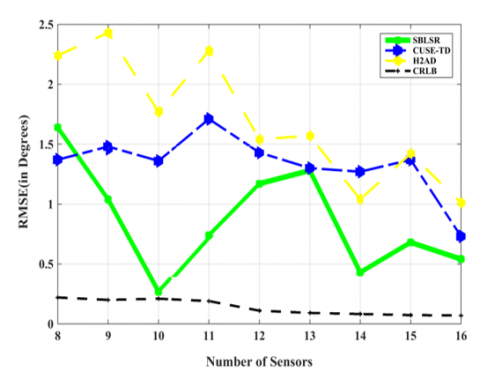
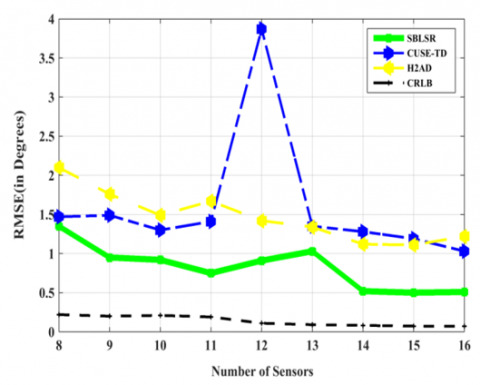
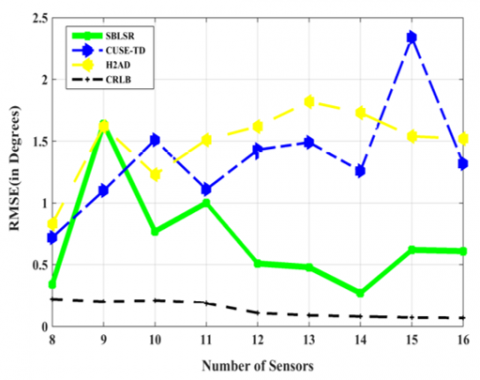
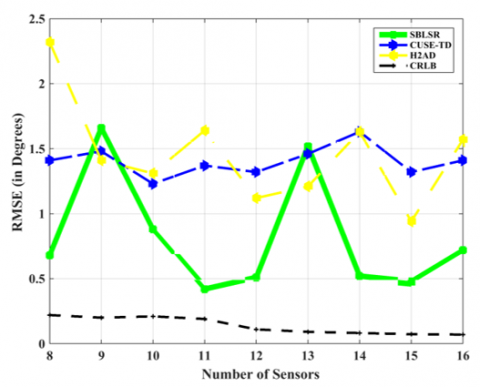
This section examines the performance of various DOA measurement models, including SBLSR, H2AD, and CUSE-TD, under different Monte Carlo simulation sizes. Figure 1 illustrates the comparison of the effectiveness of SBLSR, H2AD, and CUSE-TD in terms of RMSE across different numbers of sensors, considering a Montecarlo M_S Simulation size of 1000. Additionally, a CRLB reference line has been included to indicate an optimal lower bound for RMSE. Similarly, Figure 2 presents a comparison of the performance of SBLSR, H2AD, and CUSE-TD in terms of RMSE across various sensor numbers, considering the Monte Carlo method. M_S Simulation size of 5000. The results suggest that SBLSR consistently achieves lower RMSE values compared to H2AD and CUSE-TD, indicating better accuracy, particularly considering the varying number of sensors, which range from 8 to 16. A decreasing RMSE trend for SBLSR would confirm its superior performance in sensor-based optimization. The SBLSR is closer to the CRLB compared to other methods, considering the size of the Monte Carlo simulation. This suggests that SBLSR achieves near-optimal performance, significantly reducing DOA measurement prediction errors.
Figure 1. RMSE versus the number of sensors for various techniques for $M_C$ size of 1000
Figure 2. RMSE versus the number of sensors for various techniques for $M_C$ size of 5000
3.2 Scenario 2: Varied SNR values
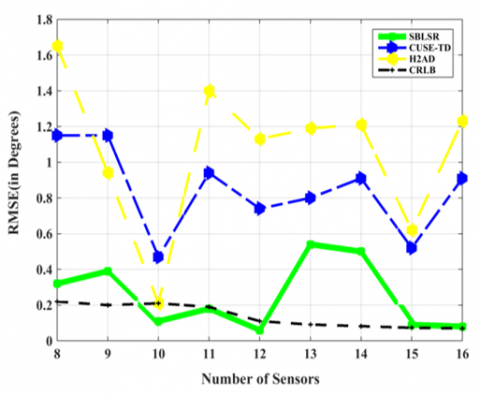
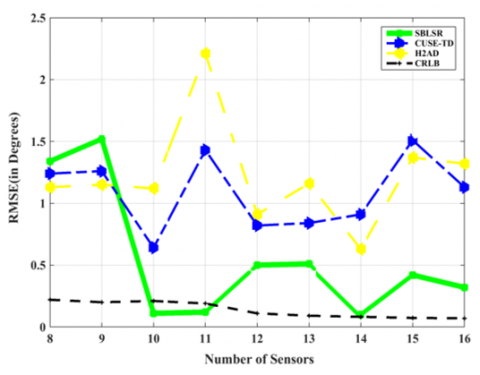
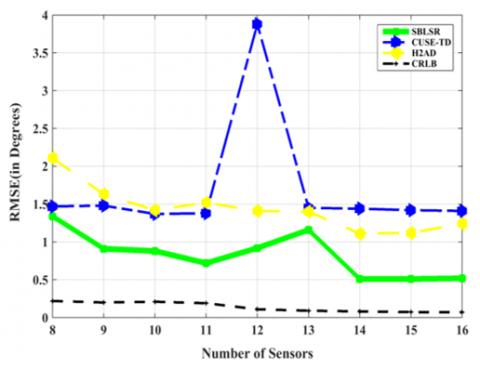
This section examines the effectiveness of various DOA measurement models, including SBLSR, H2AD, and CUSE-TD, under varying noise levels. In this work, the noise level varies between -10 and +10 SNR for massive MIMO systems. Figure 3 compares the performance of SBLSR, H2AD, and CUSE-TD in terms of RMSE across different sensor numbers, considering an SNR of 10 dB. Additionally, a CRLB reference line has been included to indicate an optimal lower bound for RMSE. Similarly, Figures 4-7 show the comparison of the effectiveness of SBLSR, H2AD, and CUSE-TD in terms of RMSE across different numbers of sensors considering SNR 5 dB, 0 dB, -5 dB, and -10 dB, respectively. The results suggest that SBLSR consistently achieves lower RMSE values compared to H2AD and CUSE-TD, indicating better accuracy, particularly considering the varying number of sensors, which range from 8 to 16. A decreasing RMSE trend for SBLSR confirms its superior performance in sensor-based optimization, particularly in the presence of sound and abysmally low SNR levels. The SBLSR is closer to the CRLB compared to other methods, particularly when considering varying noise levels. This suggests that SBLSR achieves near-optimal performance, significantly reducing DOA measurement prediction errors.
Figure 3. RMSE versus the number of sensors for various techniques at SNR = 10 dB
Figure 4. RMSE versus the number of sensors for various techniques at SNR = 5 dB
Figure 5. RMSE versus the number of sensors for various techniques at SNR = 0 dB
Figure 6. RMSE versus the number of sensors for various techniques at SNR = -5 dB
Figure 7. RMSE versus the number of sensors for various techniques at SNR = -10 dB
3.3 Discussion
The performance of the suggested SBLSR method was evaluated against three benchmark methods CUSE-TD, H2AD and MK NNSBL under identical simulation settings. The evaluation was conducted based on the RMSE across varying numbers of sensors and varying Monte Carlo iterations, with the CRLB serving as a theoretical performance limit, as shown in Table 2. To ensure a meaningful evaluation of the proposed SBLSR framework, three benchmark methods CUSE-TD, H2AD and MK NNSBL were chosen based on their relevance to contemporary DOA estimation challenges in massive MIMO environments. The CUSE-TD algorithm is specifically designed to handle both coherent and incoherent sources in high-dimensional scenarios. Its tensor decomposition approach offers improved accuracy in complex signal environments, which aligns with the multi-source, high-noise conditions often encountered in 5G/B5G systems. However, it introduces computational complexity that limits real-time applicability. The H2AD method, on the other hand, is representative of recent hybrid analog-digital DOA estimation strategies. It integrates analog beamforming with digital signal refinement, offering reduced hardware cost and energy consumption. Despite this, it is sensitive to dynamic noise conditions and lacks adaptability under low SNR and coherent interference, making it a relevant but challenging comparator. Additionally, the existing MK NNSBL method is chosen where multiple DOAs are estimated for variable SNR values.
While traditional methods such as MUSIC and sparse approaches like OMP are widely used, they exhibit key limitations: MUSIC suffers from degraded performance under high noise, coherent sources, and snapshot constraints due to its reliance on eigenvalue decomposition and uniform noise assumptions. OMP and related sparse algorithms often disregard probabilistic uncertainty and fail to incorporate noise adaptation mechanisms, making them less robust in real-world wireless environments.
Therefore, CUSE-TD, H2AD and MK NNSBL methods were selected as modern, state-of-the-art references that address some limitations of classical methods while still falling short in terms of adaptive noise modeling and low-complexity computation. This comparison highlights the practical improvements achieved by SBLSR in terms of accuracy, robustness, and computational efficiency under realistic MIMO scenarios.
Table 2. RMSE comparison with existing methodologies
|
SNR (in dB) |
RMSE in CUSE-TD [29] (in deg) Existing |
RMSE in H2AD [30] (in deg) Existing |
RMSE in MK NNSBL [7] (in deg) Existing |
RMSE in SBLSR (in deg) Proposed |
|
-10 |
2.01 |
1.77 |
1.51 |
1.47 |
|
-5 |
1.86 |
1.72 |
1.32 |
1.22 |
|
0 |
1.52 |
1.34 |
0.92 |
0.82 |
|
5 |
1.33 |
1.21 |
0.81 |
0.65 |
|
10 |
0.76 |
0.86 |
0.78 |
0.57 |
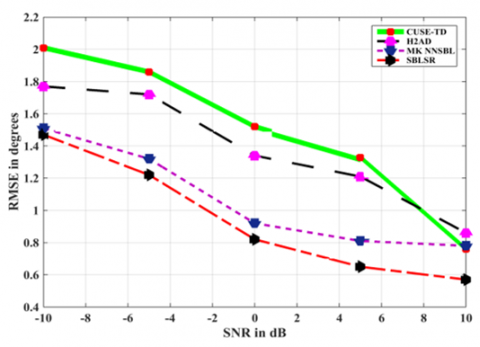
Figure 8. RMSE versus SNR performance comparison
The tabulated values in Table 2 are represented in the Figure 8 which shows the comparison of RMSE versus SNR performance of various existing methods and the proposed method. On comparing with the existing methods, the proposed method SBLSR achieves good results with RMSE reducing from 1.47 to 0.57 degree for various SNR values.
The SBLSR method consistently exhibited lower RMSE values compared to H2AD, CUSE-TD and MK NNSBL across all sensor and Monte Carlo configurations. As the number of sensors increased (ranging from 8 to 16), SBLSR demonstrated a steady decline in RMSE, highlighting its superior adaptability to more extensive sensor networks. SBLSR achieved RMSE values closer to the CRLB than the other methods, indicating near-optimal performance and enhanced estimation accuracy. In contrast, H2AD, CUSE-TD and MK NNSBL exhibited a more significant deviation from the CRLB, indicating suboptimal error minimisation. The simulation results confirm that SBLSR significantly improves RMSE performance over H2AD, CUSE-TD and MK NNSBL. By achieving RMSE values closer to CRLB, SBLSR proves to be an efficient and reliable approach for radar/sensor-based estimations, making it a preferred choice for applications requiring high-precision performance. Further experimentation with additional datasets and real-world deployments may provide deeper insights into its scalability and generalizability.
3.4 Computational complexity analysis
The proposed Sparse Bayesian Least Squares Regression (SBLSR) method achieves minimal computational complexity through its iterative optimization structure. Unlike eigen-decomposition-based methods such as MUSIC, which have complexity on the order of $O\left(M^3\right)$ due to matrix factorizations, the SBLSR algorithm avoids such operations. H2AD and CUSE-TD involve iterative and hybrid processes combining subspace techniques with heuristic and statistical updates. The dominant computation in SBLSR involves matrix-vector multiplications and updates of the variable $x^{(l)}$, which result in a per-iteration complexity of approximately $O\left(M^2\right)$, where $M$ is the number of sensors. Moreover, the algorithm converges within a small number of iterations (typically $\leq 50$ in practice), controlled by the convergence tolerance $\delta$ and maximum iteration bound $\mathcal{M}^{\uparrow}$. To further support this, runtime comparisons were conducted in MATLAB 2018a for SBLSR, MK NNSBL, MUSIC, CUSE-TD, and H2AD. As shown in Table 3, SBLSR consistently required less computation time for the samples size $N$, same number of sensors $M, \mathrm{~T}$ number of iterations and Monte Carlo runs $k$, validating its computational efficiency.
Table 3. Computational complexity analysis
|
Method |
Computational Complexity |
Dominant Operation |
Runtime (s) |
|
SBLSR |
$O\left(k \cdot M^2\right)$ |
Matrix-vector products (no decomposition) |
0.48 s |
|
MK NNSBL |
$O\left(K T M^2+K M N\right)$ |
Multiple kernel-based posterior updates (no decomposition) |
0.63 s |
|
MUSIC |
$O\left(M^3+M^2 N\right)$ |
Eigen-decomposition |
1.95 s |
|
H2AD |
$O\left(M^2+\mathrm{N} \log N\right)$ |
Iterative adaptive update |
1.32 s |
|
CUSE-TD |
$\begin{gathered}O\left(M^2 N+\right. \mathrm{M} \log N)\end{gathered}$ |
Subspace estimation and covariance analysis |
1.62 s |
This research proposes the SBLSR approach for high-resolution and noise-resilient DOA estimation in massive MIMO systems. The hybrid framework successfully integrates the strengths of sparse Bayesian learning and least squares optimization, achieving near-CRLB accuracy while outperforming benchmark methods such as CUSE-TD, H2AD, and MK NNSBL methods across various SNR and sensor configurations. However, the method assumes that the noise is independently and identically distributed and relies on prior knowledge of sensor positions, which may limit its applicability in more unpredictable or adversarial environments. Although SBLSR achieves lower computational complexity by avoiding matrix decompositions, the iterative updates can still incur moderate processing overhead in large-scale, real-time applications. Despite these constraints, SBLSR represents a significant step forward in robust DOA estimation, especially in low SNR conditions and scenarios with partially corrupted measurements. Its ability to converge rapidly and adapt to measurement uncertainty demonstrates its practical utility. Future work will focus on extending the model to incorporate dynamic environmental uncertainty, enhancing scalability, and integrating adaptive antenna reconfiguration to support real-time deployment in next-generation wireless communication systems.
We sincerely thank the SJB Institute of Technology, faculty, and friends for their support in all aspects, which contributed to the completion of this work and paper.
|
S |
Number of sensors/radars in the MIMO network |
|
M |
Number of elements in the MIMO radar array |
|
$M_S$ |
Monte Carlo simulation size |
|
$A_i$ |
Actual DOA measurement outcome |
|
$\widehat{A}_l$ |
Estimated DOA measurement outcome |
|
x,y,z |
Coordinates of the target node in MIMO networks |
|
d |
Euclidean distance between sensors and target nodes |
|
$w$ |
Weight vector in the Bayesian regression model |
|
P |
Probability function for Bayesian modelling |
|
C |
The covariance matrix for sparse Bayesian estimation |
|
T |
Transformation matrix for signal processing |
|
Greek symbols |
|
|
Θ |
Direction of Arrival (DOA) angle |
|
$\sigma^2$ |
Variance of noise |
|
$\lambda$ |
Wavelength of the signal |
|
µ |
The mean value of a distribution |
|
Φ |
Phase shift in MIMO systems |
|
α |
Scaling factor in Bayesian estimation |
|
β |
Regularization parameter in least squares regression |
|
Ρ |
The ratio of measurement without noise to total measurements |
|
η |
Noise measurement deviation |
|
Operations |
|
|
min |
Minimization operation for optimization |
|
arg min |
Argument of the minimum value in optimization |
|
log |
Logarithmic function |
|
exp |
Exponential function |
|
$\|\cdot\|_2$ |
Norm or absolute value |
|
diag (.) |
Diagonal matrix representation |
[1] Morchid, A., El Alami, R., Raezah, A.A., Sabbar, Y. (2024). Applications of Internet of Things (IoT) and sensor technology to increase food security and agricultural sustainability: Benefits and challenges. Ain Shams Engineering Journal, 15(3): 102509. https://doi.org/10.1016/j.asej.2023.102509
[2] Yang, H., Qamar, F., Kazmi, S.H.A., Jafri, S.T.A., Ariffin, K.A.Z., Nguyen, Q.N. (2024). Interference mitigation in B5G network architecture for MIMO and CDMA: State of the art, issues, and future research directions. Information, 15(12): 771. https://doi.org/10.3390/info15120771
[3] Zhou, S., Jadoon, W., Khan, I.A. (2023). Computing offloading strategy in mobile edge computing environment: A comparison between adopted frameworks, challenges, and future directions. Electronics, 12(11): 2452. https://doi.org/10.3390/electronics12112452
[4] Iqbal, U., Riaz, M.Z.B., Zhao, J., Barthelemy, J., Perez, P. (2023). Drones for flood monitoring, mapping and detection: A bibliometric review. Drones, 7(1): 32. https://doi.org/10.3390/drones7010032
[5] Huang, M., Li, R., Zou, Y., Zheng, B., Qian, C., Jin, H., Chen, H. (2024). A comprehensive review of metasurface-assisted direction-of-arrival estimation. Nanophotonics, 13(24): 4381-4396. https://doi.org/10.1515/nanoph-2024-0423
[6] Ahmad, M., Zhang, X., Ali, F., Lai, X. (2025). Enhanced DOD and DOA estimations in coprime MIMO radar: Modified matrix pencil method. Digital Signal Processing, 159: 104977. https://doi.org/10.1016/j.dsp.2024.104977
[7] Anughna, N., Ramesha, M. (2024). Multiplicative basis function based adaptive DOA estimation in optimal MIMO sparse antenna reconfiguration model. IETE Journal of Research, 70(9): 7219-7230. https://doi.org/10.1080/03772063.2024.2351554
[8] Li, Y., Shi, B., Shu, F., Song, Y., Wang, J. (2023). Deep learning-based DOA estimation for hybrid massive MIMO receive array with overlapped subarrays. EURASIP Journal on Advances in Signal Processing, 2023: 110. https://doi.org/10.1186/s13634-023-01074-3
[9] Zhang, F., Cao, H., Wang, K. (2023). Coherent DOA estimation algorithm with co-prime arrays for low SNR signals. Sensors, 23(23): 9320. https://doi.org/10.3390/s23239320
[10] Al Kassir, H., Kantartzis, N.V., Lazaridis, P.I., Sarigiannidis, P., Goudos, S.K., Christodoulou, C.G., Zaharis, Z.D. (2024). Improving DOA estimation via an optimal deep residual neural network classifier on uniform linear arrays. IEEE Open Journal of Antennas and Propagation, 5(2): 460-473. https://doi.org/10.1109/OJAP.2024.3362061
[11] Veerendra, D., Umesh, B.N., Nagabushanam, M. (2023). Enhanced direction of arrival estimation via fast sensor array processing. IEEE Sensors Letters, 7(6): 1-4. https://doi.org/10.1109/LSENS.2023.3278309
[12] AB, A.G., Babu, N.V. (2025). Accurate direction of arrival estimation for 5G MIMO sparse channel using advanced multikernel based NNSBL. In 2025 3rd International Conference on Integrated Circuits and Communication Systems (ICICACS), Raichur, India, pp. 1-6. https://doi.org/10.1109/ICICACS65178.2025.10967677
[13] Narayanaswamy, A., Muniyappa, R. (2023). Underdetermined direction of arrival estimation for multiple input and multiple outputs sparse channel based on Bayesian learning framework. Indonesian Journal of Electrical Engineering and Computer Science, 31(1): 170-179. https://doi.org/10.11591/ijeecs.v31.i1.pp170-179
[14] Xu, W., Liu, M., Yi, S. (2025). Spectrum attention mechanism-based acoustic vector DOA estimation method in the presence of colored noise. Applied Sciences, 15(3): 1473. https://doi.org/10.3390/app15031473
[15] Molaei, A.M., Zakeri, B., Andargoli, S.M.H., Abbasi, M.A.B., Fusco, V., Yurduseven, O. (2024). A comprehensive review of direction-of-arrival estimation and localization approaches in mixed-field sources scenario. IEEE Access, 12: 65883-65918. https://doi.org/10.1109/ACCESS.2024.3398351
[16] Tominaga, E.N., López, O.L.A., Svensson, T., Souza, R.D., Alves, H. (2024). Distributed MIMO networks with rotary ULAs for indoor scenarios under Rician fading. IEEE Open Journal of the Communications Society, 5: 6367-6380. https://doi.org/10.1109/OJCOMS.2024.3474170
[17] Linder, M., Schmidt, D., Schwarz, D., Riese, N., Waldschmidt, C. (2025). A sub-aperture based calibration algorithm for MIMO antenna arrays. IEEE Open Journal of Antennas and Propagation, 6(2): 548-559. https://doi.org/10.1109/OJAP.2025.3537681
[18] Wei, Z., Piao, J., Yuan, X., Wu, H., Zhang, J.A., Feng, Z. (2024). Waveform design for MIMO-OFDM integrated sensing and communication system: An information theoretical approach. IEEE Transactions on Communications, 72(1): 496-509. https://doi.org/10.1109/TCOMM.2023.3317258
[19] Narayanaswamy, A., Muniyappa, R. (2023). Antenna reconfiguration based DOA estimation for AWGN channel in MIMO applications. Progress in Electromagnetics Research C, 128: 73-84. https://doi.org/10.2528/pierc22110404
[20] Li, N., Zhang, X., Lv, F., Zong, B. (2024). Direction-of-arrival estimation via sparse Bayesian learning exploiting hierarchical priors with low complexity. Sensors, 24(7): 2336. https://doi.org/10.3390/s24072336
[21] Jenkinson, G., Abbasi, M.A.B., Molaei, A.M., Yurduseven, O., Fusco, V. (2023). Deep learning-enabled improved direction-of-arrival estimation technique. Electronics, 12(16): 3505. https://doi.org/10.3390/electronics12163505
[22] Liu, Z., Li, X.P., So, H.C. (2023). ℓ0-norm minimization-based robust matrix completion approach for MIMO radar target localization. IEEE Transactions on Aerospace and Electronic Systems, 59(5): 6759-6770. https://doi.org/10.1109/TAES.2023.3280462
[23] Sun, M., Chen, P., Cao, Z., Shen, F. (2025). Low-complexity estimation algorithm and decoupling scheme for FRaC system. IEEE Transactions on Intelligent Vehicles. https://doi.org/10.1109/TIV.2024.3383063
[24] Wang, W., Wang, X., Guo, Y., Gui, G. (2025). Parameter estimation with bistatic MIMO radar: A coarray tensor decomposition framework. IEEE Transactions on Aerospace and Electronic Systems, 61(2): 4450-4465. https://doi.org/10.1109/TAES.2024.3505112
[25] Li, L., Wang, X., Guo, Y., Lan, X. (2025). Compressed PARAFAC-based parameter estimation for mmWave polarized massive MIMO systems. IEEE Sensors Journal, 25(9): 16170-16181. https://doi.org/10.1109/JSEN.2025.3535998
[26] Pavel, S.R., Zhang, Y.D. (2024). Direction-of-arrival estimation of mixed coherent and uncorrelated signals. IEEE Signal Processing Letters, 31: 2180-2184. https://doi.org/10.1109/LSP.2024.3446245
[27] Xu, K., Xia, X., Li, C., Hu, G., Su, Q., Xie, W. (2024). Spatial structure matching-based DOA estimation and tracking for integrated sensing and communication massive MIMO OFDM system. IEEE Transactions on Cognitive Communications and Networking, 10(2): 526-540. https://doi.org/10.1109/TCCN.2023.3335378
[28] Liu, R., Li, M., Liu, Q., Swindlehurst, A.L. (2025). DOA estimation-oriented joint array partitioning and beamforming designs for ISAC systems. IEEE Transactions on Wireless Communications, 24(3): 2052-2066. https://doi.org/10.1109/TWC.2024.3516037
[29] Dakulagi, R., Raushan, R., Dutta, S., Alosaimi, M.T., Villagomez-Galindo, M. (2025). CUSE-TD algorithm for precision detection of coherent and uncorrelated signals. IEEE Access, 13: 11307-11319. https://doi.org/10.1109/ACCESS.2024.3525360
[30] Shu, F., Shi, B., Chen, Y., Bai, J., Li, Y., Liu, T. (2025). A new heterogeneous hybrid massive MIMO receiver with an intrinsic ability of removing phase ambiguity of DOA estimation via machine learning. IEEE Transactions on Machine Learning in Communications and Networking, 3: 17-29. https://doi.org/10.1109/TMLCN.2024.3506874
[31] Mylonakis, C.M., Zaharis, Z.D. (2024). A novel three-dimensional direction-of-arrival estimation approach using a deep convolutional neural network. IEEE Open Journal of Vehicular Technology, 5: 643-657. https://doi.org/10.1109/OJVT.2024.3390833
[32] Meng, D., Li, X., Wang, W. (2024). Robust tensor decomposition approach for DOA estimation with EMVS-MIMO radar. IEEE Sensors Journal, 24(19): 31262-31271. https://doi.org/10.1109/JSEN.2024.3441839
[33] Chen, P.C., Vaidyanathan, P.P. (2024). Channel estimation for mmWave using the convolutional beamspace approach. IEEE Transactions on Signal Processing, 72: 2921-2938. https://doi.org/10.1109/TSP.2024.3379859