Nilthon Arce Fernández*![]() | Jhon Darwin Rimapa Roncal
| Jhon Darwin Rimapa Roncal![]() | Eliseo Montoya Pintado
| Eliseo Montoya Pintado![]() | Henry Oswaldo Pinedo Nava
| Henry Oswaldo Pinedo Nava![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The aim of this research is to develop an electric motor simulator based on an electromechanical mathematical model, which can be used as a didactic tool for teaching courses in mechanical, electrical and electromechanical engineering laboratories. We used an analytical method to study the principles and elements of all parts of a DC motor and an experimental technique to collect the data; the Python programming language was used to perform the data analysis. In the validation of the model, a correlation of 0.775 was found for current; that is, the strength of association is high, and a correlation of 0.94 for velocity, which explains a very high strength of association. Furthermore, the root mean square error in current is 0.002, while the root mean square error in velocity is 1.189. The numerical results illustrate the robustness and stability of the mathematical model. The research has both academic and social contributions, it serves as a basis for future research work related to mathematical modeling in the field of mechanical, electrical, electromechanical, and control engineering. In future research, the goal is to model a number of motor types and subsequently develop an electric motor multisimulator for educational and economic purposes.
DC motor, mathematical model, electric motor simulator, electromechanical parameters, simulation, didactic support
Strengthening the skills of students and professors in mathematical modeling would significantly help them to carry out research projects, which, on the one hand, would give them a wider field of action and, on the other hand, would broaden the level of inquiry by being able to vary parameters without having to build or modify any physical structure, reducing costs.
Mathematics and specifically mathematical modeling, allow to predict the behavior of a real system, this is extremely useful to prevent for example the high currents that usually produce the motors during startup, as well as the quality and effectiveness of its performance for which it was designed. Modeling results can help prevent and avoid engine damage.
Nowadays, with the advance of science and technology, it is necessary to develop technological tools to reinforce the learning of students and/or teachers. Therefore, the present research aims to develop an electric motor simulator based on an electromechanical mathematical model that serves as a didactic support for the teaching of courses taught in the laboratories of Mechanical, Electrical, Electromechanical Engineering, etc.
Mechanical, Electrical and Electromechanical Engineering laboratories often use high-power, three-phase voltage equipment that limits students' ability to explore different configurations due to safety considerations [1, 2]. By implementing the simulator, students will be able to safely explore different motor configurations without generating additional costs in their learning.
According to Paulo et al. [3], DC motors have specific characteristics that can be explored and evaluated using mathematical models. This makes it possible to describe, simulate and analyze the behavior of the motor under different conditions and in advance before its acquisition or to identify failures if it is already in operation. Patrascoiu [4] proposed a model for the DC motor, considering as inputs the supply voltage and the load torque and as outputs velocity, angular displacement, and current supply. The author designed a simulator through which the dynamic characteristics of the motor can be observed under different operating conditions. Simulation models help improve the teaching of engine operation. Ayasun and Nwankpa [5] described the implementation in MATLAB/Simulink of three tests of induction motors, achieving the identification of parameters. Limon et al. [6] in their research presented a Java-based simulator for teaching basic control; the application was developed using the Easy Java Simulation tool.
One of the applications of mechanical engineering is the control of DC motors. Muresan et al. [7] used mathematical models to design a velocity controller for a DC motor. Researchers are currently working on models capable of interacting and controlling a physical system in real-time. Barber et al. [8] used a model with a DC motor platform to conduct tests and get experimental results. Emhemed and Mamat [9] illustrated how to control the velocity of a DC motor using different mathematical models. Universal motors are frequently used in the electrification of homes. Ben Abdeljawed and El Amraoui [10] proposed a control strategy for DC-powered universal motors, using the control prototyping feature offered by dSPACE MicroAutoBox, performed the simulation in MATLAB/Simulink and the implementation in MicroAutoBox via the real-time interface.
Designing and implementing a platform to teach or reinforce learning is vitally important today. Cabré et al. [11] designed a didactic platform that shows step by step the simplest way to control the velocity and position of a DC motor. Due to technological advancement, Mechanical Engineering students must have tools to reinforce their learning. To offer students and professionals a tool to improve their fuzzy design skills, Navarro et al. [12] presented an approach for developing a remote diffuse control laboratory, managing to test the performance of diffuse controllers in a DC motor. Researchers are trying to create new resources to support teaching, especially for engineering. Tejado et al. [13] described step by step the development of simulators based on physical modeling to support the teaching of automatic control, considering the rotating pendulum simulator as an illustrative example.
In the present investigation, unlike those mentioned above, the electrical part and the mechanical part of a DC motor were modeled using differential equations and transfer functions, the electromechanical model was validated and then developed, as teaching support, a motor simulator electrical whose estimates were acceptable in relation to the behavior of the real physical system. Through this educational tool represented by the simulator, we also seek to provide students with practical development alternatives called "hands-on" through which they can implement the proposed equipment and carry out the experimentation that will allow them to reinforce their theoretical knowledge in the courses: electricity and magnetism, mechanical and electrical measurements, analysis of electrical circuits, rotating electrical machines, engineering programming, among others.
It is important to point out that for these purposes there are already commercial simulator solutions that are very expensive and do not allow the student's hands-on experience. The present alternative is based, on the one hand, on facilitating the student's practical experience and, on the other hand, on low-cost equipment.
This work helps in the incursion and learning of mathematical modeling to students and professors of mechanical and electrical engineering, specifically in the area of Electromechanics. In addition, a seedbed of students and/or professors can be initiated in mathematical modeling and programming languages to solve real problems.
The DC motor is an electromechanical system represented by dynamic equations that result from the combination of the mechanical and electrical models of the motor. According to Martis et al. [1], the mathematical modeling of a DC motor is done based on its electrical, mechanical, and electromechanical parameters. According to Ocegueda [14], the Laplace transform is very useful for solving problems represented by complex models. Figure 1 shows a graphical representation of how the Laplace transform works.
Figure 1. Diagram of the operation of the Laplace transform
Figure 2 shows a general graphical representation of a DC motor used for modeling [11].
Figure 2. General graphical representation of a DC Motor
2.1 Mathematical model with differential equations
From the motor circuit mesh, we obtained the following equations:
$v(t)=R i(t)+L \frac{d i(t)}{d t}+E_a(t)$ (1)
$L \frac{d i(t)}{d t}=v(t)-R i(t)-E_a(t)$ (2)
where, v(t) is the voltage, i(t) is the current, R is the resistance, L is the inductance and Ea(t) is the counter-electromotive force.
From the motor mechanical section, the following equations were obtained:
$T_m(t)=J \frac{d w(t)}{d t}+B w(t)$ (3)
$J \frac{d w(t)}{d t}=T_m(t)-B w(t)$ (4)
where, Tm(t) is the torque, B is the friction coefficient, J is the moment of Inertia, and w(t) is the angular velocity.
Proportional relationship between the voltage induced in the armature and the angular velocity of the motor shaft:
$E_a(t)=\mathrm{p} w(t)$ (5)
Proportional relationship between mechanical torque and electric current:
$T_m(t)=\mathrm{q} i(t)$ (6)
2.2 Mathematical model with transfer functions
Transfer functions are algebraic expressions that can be used by students or professionals with basic knowledge of mathematics. Therefore, to give more prominence to the study, the transfer functions were obtained from the phenomenological model of the DC motor.
Applying Laplace's transform to Eq. (2), we obtained:
$l\left[L \frac{d i(t)}{d t}\right]=l\left[v(t)-R i(t)-E_a(t)\right]$ (7)
$L s i(s)=v(s)-R i(s)-E_a(s)$ (8)
Applying Laplace's transform to Eq. (4) yielded:
$l\left[J \frac{d w(t)}{d t}\right]=l\left[T_m(t)-B w(t)\right]$ (9)
$J s w(s)=T_m(s)-B w(s)$ (10)
Applying Laplace's transform to Eqs. (5)-(6), we obtained:
$E_a(s)=\mathrm{p} w(s)$ (11)
$T_m(s)=\mathrm{q} i(s)$ (12)
By substituting Eqs. (11)-(12) into Eq. (8), we obtained:
$L s \frac{T_m(s)}{q}=v(s)-R \frac{T_m(s)}{q}-p w(s)$ (13)
From Eq. (13) the voltage was obtained:
$v(s)=\frac{(R+L s) T_m(s)}{q}+p w(s)$ (14)
From Eq. (10) the angular velocity was obtained:
$w(s)=\frac{T_m(s)}{J s+B}$ (15)
By substituting Eq. (15) into Eq. (14), we obtained:
$v(s)=\frac{(R+L s) T_m(s)}{q}+p \frac{T_m(s)}{J s+B}$ (16)
$v(s)=\left[\frac{(R+L s)}{q}+\frac{p}{J s+B}\right] T_m(s)$ (17)
$v(s)=\frac{(R+L s)(J s+B)+p q}{q(J s+B)} T_m(s)$ (18)
From Eq. (18) we obtained the transfer function that relates the motor torque to the voltage:
$\frac{T_m(s)}{v(s)}=\frac{q(J s+B)}{L J s^2+(R J+L B) s+R B+p q}$ (19)
Similarly, from Eqs. (8), (10)-(12), we obtained the transfer function that relates one of the outputs of the system to the voltage.
Transfer function relating counter-electromotive force to voltage:
$\frac{E_a(s)}{v(s)}=\frac{p q}{L J s^2+(R J+L B) s+R B+p q}$ (20)
Transfer function that relates armature current to voltage:
$\frac{i(s)}{v(s)}=\frac{J s+B}{L J s^2+(R J+L B) s+R B+p q}$ (21)
Transfer function relating angular velocity to voltage:
$\frac{w(s)}{v(s)}=\frac{q}{L J s^2+(R J+L B) s+R B+p q}$ (22)
From Eq. (22), we obtained the transfer function that relates the position of the motor to the voltage:
$\frac{\theta(s)}{v(s)}=\frac{q}{s\left(L J s^2+(R J+L B) s+R B+p q\right)}$ (23)
The electromechanical mathematical model has as its only input the voltage and as outputs the current expressed in Eq. (21), the velocity expressed in Eq. (22) and the position of the motor expressed in Eq. (23).
Since it is a linear problem, the model with differential equations supports the same results as the model with transfer functions.
Figure 3. Results for armature current
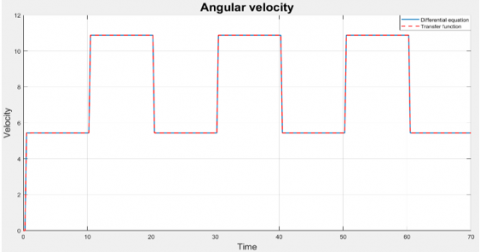
Figure 4. Results for angular velocity
As illustrated in Figure 3, the models yield identical results for current. Similarly, Figure 4 demonstrates that the models produce identical results for velocity.
This work focused on applying mathematical modeling to examine DC motor performance and behavior. Model validation was performed using a permanent magnet DC motor to measure its electrical parameters (e.g., resistance, inductance, etc.) and behavior (e.g., current, power, torque, speed, angular acceleration, etc.). Sampling was either non-probabilistic or targeted.
We applied an analytical method to study and understand the principles and elements of all motor parts and an experimental technique to collect data parameters to validate the model. The measuring equipment (Arduino Mega 2560 board, current sensor, H-bridge driver, SD micro, RTC module, multitester, LCR multimeter, digital oscilloscope) was used as instruments. The experimental parameters changed their values due to manipulating the variables under controlled conditions.
Once the requisite parameters had been obtained, the implementation was carried out using the free trial version of the MATLAB software. The simulation of the phenomenological model, represented by differential equations, was performed using MATLAB's Simulink, which is a visual programming environment. Additionally, the simulation of the transfer functions was conducted.
To validate the model, the pingouin library implemented in the Python programming language (Google Colaboratory) was used, validating the results using the Pearson correlation coefficient, its significance, confidence interval or a p value. The mean square error was used to quantify the accuracy of the model predictions.
4.1 Experimental determination of parameters
To validate the electromechanical mathematical model, a 12-volt DC motor was used, which included a hall effect encoder that facilitated the measurement of revolutions per minute (see Figure 5). Table 1 shows the most relevant characteristics provided by the manufacturer's data sheet.
A prototype was implemented with all connections (see Figure 6) that allowed us to obtain motor parameters, armature current measurements and angular velocity measurements.
Figure 5. 12-volt DC motor
Figure 6. Prototype for measurements
Table 1. Engine technical specifications
|
Characteristics |
Values |
|
Motor supply voltage |
5V - 12V DC |
|
Encoder supply voltage |
3.3V - 5V DC |
|
No-load current consumption |
100mA |
|
Nominal current consumption |
300mA |
|
Current consumption stopped axis |
1000mA (Peak) |
|
Rotation velocity |
100 RPM @12V |
|
Shaft diameter |
4mm, D-shaped shaft |
|
Outer diameter of housing |
25 mm |
|
Dimensions |
D25mm*L71mm |
|
Weight |
95 grams |
The parameter values obtained from the experiment are shown in Table 2.
Table 2. Value of the parameters obtained
|
Parameter |
Symbol |
Value |
Unit |
|
Moment of Inertia |
J |
0.006 |
Kg.m2 |
|
Viscous Friction Constant |
B |
0.003 |
N.m.s |
|
Force Constant Electromotive |
Ka=p |
1.091 |
V/rad s |
|
Engine Torque Constant |
Km=q |
1.091 |
N.m/A |
|
Armor Resistance |
R |
4.2 |
Ohms |
|
Electrical Inductance |
L |
0.003427 |
H |
4.2 Mathematical model validation
In order to simulate the armature current and angular velocity, the parameters set forth in Table 2 were incorporated into the mathematical model. In order to assess the efficacy of the model, voltage variations were conducted on the motor.
Figure 7 shows the implementation of the mathematical model in the MATLAB/Simulink program.
Figure 8 shows the motor current along with the current estimated by the mathematical model.
Figure 9 shows the velocity of the motor along with the velocity estimated by the mathematical model.
Linear correlation coefficients are statistics that quantify the linear association between two numerical variables. There are different types of correlation measures, including Pearson, Spearman's Rho, and Kendall's Tau. The Pearson correlation coefficient was used in this study.
Figure 7. Model implementation in MATLAB/Simulink
Figure 8. Graphical current validation
Figure 9. Graphical velocity validation
For the current, the Pearson correlation coefficient was 0.775 (see Figure 10), i.e., the strength of association between the current of the motor and the current estimated by the mathematical model is high. With a mean square error of 0.002.
Figure 10. Validation of current and velocity
For the velocity, the Pearson correlation coefficient was 0.94 (see Figure 10), i.e., the strength of association between the velocity of the motor and the velocity estimated by the mathematical model is very high. With a mean square error of 1.189.
The pingouin library has one of the most complete implementations. With the corr() function, in addition to the correlation coefficient, its significance, confidence interval and statistical power, among others, were obtained favorably (see Figure 10).
4.3 Sensitivity analysis of the mathematical model
To evaluate the effectiveness of the electromechanical mathematical model, a sensitivity analysis was performed considering voltage variations every 9.5 seconds. The results, as described in Table 3, demonstrate the robustness and stability of the model with respect to both current. Consequently, the model was used to build an electric motor simulator, which serves for didactic support in related academic disciplines.
Table 3. Values estimated by the mathematical model
|
Time (s) |
Voltage (V) |
Current (A) |
Velocity (rad/s) |
||
|
Motor |
Model |
Motor |
Model |
||
|
0 |
0 |
0 |
0 |
0 |
0 |
|
0.5 |
6 |
0.113 |
0.065 |
4.2814253 |
5.26 |
|
10 |
6 |
0.117 |
0.065 |
5.5340411 |
5.26 |
|
10.5 |
12 |
0.119 |
0.080 |
6.0012483 |
10.70 |
|
20 |
12 |
0.111 |
0.080 |
11.4466755 |
10.70 |
|
20.5 |
6 |
0.112 |
0.065 |
10.8666852 |
5.26 |
|
30 |
6 |
0.117 |
0.065 |
5.5783375 |
5.26 |
|
30.5 |
12 |
0.119 |
0.080 |
6.3556827 |
10.70 |
|
40 |
12 |
0.111 |
0.080 |
11.4507072 |
10.70 |
|
40.5 |
6 |
0.111 |
0.065 |
10.9190450 |
5.26 |
|
50 |
6 |
0.116 |
0.065 |
5.5420940 |
5.26 |
|
50.5 |
12 |
0.118 |
0.080 |
6.1341586 |
10.70 |
|
60 |
12 |
0.111 |
0.080 |
11.4547285 |
10.70 |
|
60.5 |
6 |
0.112 |
0.065 |
10.7901664 |
5.26 |
|
70 |
6 |
0.124 |
0.065 |
5.5340411 |
5.26 |
4.4 Electric motor simulator
The electric motor simulator was developed using the electromechanical mathematical model studied in Section 2, the motor parameters and the voltage which is the input variable enter the model through programming in Simulink/MATLAB.
The electric motor simulator has a user-friendly interface where three buttons are displayed, the “DC MOTOR” button allows you to enter a cover image, the “CURRENT” button is to simulate the motor current and the “VELOCITY” button allows you to simulate the motor velocity (see Figure 11).
Figure 11. Main view of the electric motor simulator
The simulations are acceptable in relation to the behavior of the real physical system. Therefore, the electric motor simulator will be implemented to provide teaching support in courses taught in the laboratories of Mechanical, Electrical, Electromechanical Engineering, Control, etc.
Figure 12 shows the armature current estimated by the electric motor simulator.
Figure 12. Armature current simulation
Figure 13 shows the angular velocity estimated by the electric motor simulator.
Figure 13. Angular velocity simulation
According to the numerical results obtained, the mathematical model used in this study is acceptable. The model proposed by Meza and Ramos [15] also achieved similar results to ours, but it was not implemented for educational use.
Mendoza et al. [16] they modeled a DC motor using differential equations and state space. Hernández and Quijano [17] the mathematical modeling of a DC motor was carried out based on its experimentally obtained parameters. Said et al. [18] they performed the mathematical modeling, simulation and control system of a DC motor. Ortega [19] designed a velocity and position control system for a DC motor. But they did not implement a simulator to help students understand how DC motors work and develop skills highly valued by the industry.
According to Marin et al. [20], simulation tools are currently needed to support innovations in engineering education. Bjekic et al. [21] adapted a set of GeoGebra applications for use in teaching electrical machines and drives. García et al. [22] they developed an economical and flexible equipment for training students in modeling and/or automatic control. Navarro-Durán et al. [23] they designed and implemented four electromechanical prototypes that were used to complement the teaching of automatic control, which could have a positive impact on the professional performance of future control engineers. Kalaani et al. [24] through a hybrid approach they succeeded in integrating practical experimentation with a virtual simulation environment in an Electrical Machines course. In our research, the developed simulator will reinforce the theoretical and practical knowledge of students and/or teachers in the courses: electricity and magnetism, mechanical and electrical measurements, electrical circuit analysis, rotating electrical machines, engineering programming, among others.
Remote labs are now a widely applicable technology in universities. Nenov et al. [25] described a Lab for remote access to a continuum current combination of DC motor and generator. The present study is the beginning of the implementation of a remote laboratory to study DC motors in real time.
The numerical and graphical results showed that the mathematical model used is acceptable for implementation in the developed electric motor simulator.
In the validation of the model, a correlation of 0.775 was found for current; that is, the strength of association is high, and a correlation of 0.94 for velocity, which explains a very high strength of association. Furthermore, the root mean square error for current was 0.002, while the root mean square error for velocity was 1.189.
The results of the statistical analysis indicate that the developed simulator will facilitate a deeper comprehension of the operational characteristics of the DC motor, thereby reducing the incidence of equipment damage and associated maintenance costs.
The electric motor simulator developed in this study will be implemented in the Mechanical and Electrical Engineering Laboratory of the National University of Jaen (Peru), to contribute to make the teaching process more practical in the courses where it can be applied.
This research work is of academic and social support, since it serves as a basis for venturing into future research related to mathematical modeling in the field of mechanical, electrical, electromechanical and control engineering. In future research, it is intended to model various types of motors and then develop a multisimulator of electric motors for educational and economic purposes.
[1] Martis, C.S., Hedesiu, H.C., Szabo, L., Tataranu, B., Jurca, F., Oprea, C. (2006). Electrical machines virtual laboratory: Grid connection of a synchronous generator. In 12th International Power Electronics and Motion Control Conference, Portoroz, Slovenia, pp. 1709-1714. https://doi.org/10.1109/EPEPEMC.2006.4778651
[2] Aintablian, H., Spurlin, J. (1996). Development of an undergraduate electrical machines laboratory. In Conference Record, Orlando, FL, USA, pp. 265-268. https://doi.org/10.1109/SOUTHC.1996.535076
[3] Paulo, I., Carlos, A., Pérez, M.M. (2017). Modelagem matemática de motor de corrente contínua e análise dinâmica. Proceeding Series of the Brazilian Society of Applied and Computational Mathematics, 5(1): 1-6. https://doi.org/10.5540/03.2017.005.01.0178
[4] Patrascoiu, N. (2018). Designing a DC motor simulator based on virtual instrumentation. In Electric Machines for Smart Grids Applications-Design, Simulation and Control. IntechOpen. https://doi.org/10.5772/intechopen.79202
[5] Ayasun, S., Nwankpa, C.O. (2005). Induction motor tests using MATLAB/Simulink and their integration into undergraduate electric machinery courses. IEEE Transactions on Education, 48(1): 37-46. https://doi.org/10.1109/TE.2004.832885
[6] Limon, D., Salas, F., Ramírez, D.R., Alamo, T., Camacho, E.F. (2006). A Java based simulator for basic control education. IFAC Proceedings Volumes, 39(6): 481-486. https://doi.org/10.3182/20060621-3-ES-2905.00083
[7] Muresan, C.I., Folea, S., Mois, G., Dulf, E.H. (2013). Development and implementation of an FPGA based fractional order controller for a DC motor. Mechatronics, 23(7): 798-804. https://doi.org/10.1016/j.mechatronics.2013.04.001
[8] Barber, R., Rosa, D.R., Garrido, S. (2013). Adaptive control of a DC motor for educational practices. IFAC Proceedings Volumes, 46(17): 244-249. https://doi.org/10.3182/20130828-3-UK-2039.00056
[9] Emhemed, A.A.A., Mamat, R.B. (2012). Modelling and simulation for industrial DC motor using intelligent control. Procedia Engineering, 41: 420-425. https://doi.org/10.1016/j.proeng.2012.07.193
[10] Ben Abdeljawed, H., El Amraoui, L. (2022). Simulation and rapid control prototyping of DC powered universal motors speed control: Towards an efficient operation in future DC homes. Engineering Science and Technology, an International Journal, 34: 101092. https://doi.org/10.1016/j.jestch.2021.101092
[11] Cabré, T.P., Vela, A.S., Ribes, M.T., Blanc, J.M., Pablo, J.R., Sancho, F.C. (2021). Didactic platform for DC motor speed and position control in Z-plane. ISA Transactions, 118: 116-132. https://doi.org/10.1016/j.isatra.2021.02.020
[12] Navarro, J.L., Díez, J.L., Valera, A., Vallés, M. (2008). Remote fuzzy control of a DC motor. IFAC Proceedings Volumes, 41(2): 13652-13658. https://doi.org/10.3182/20080706-5-KR-1001.02312
[13] Tejado, I., Torres, D., Pérez, E., Vinagre, B.M. (2016). Physical modeling based simulators to support teaching in automatic control: The Rotatory Pendulum. IFAC-PapersOnLine, 49(6): 75-80. https://doi.org/10.1016/j.ifacol.2016.07.156
[14] Ocegueda, L.A. (2018). Transformada de Laplace. Departamento de Ingeniería en Energía, Universidad Politécnica de Aguascalientes, México. https://www.academia.edu/download/57102966/EC2_ENE02A_UP170146.pdf.
[15] Meza, F.J., Ramos, P.D. (2015). Modelo matemático motor DC conexión independiente. Facultad de Ingeniería, Ingeniería Eléctrica, Universidad Politécnica Salesiana, Ecuador. https://dspace.ups.edu.ec/handle/123456789/10257.
[16] Mendoza, B.A.F., Benavidez, Á.S.V., Estrella, D.R.Ñ., Sulca, F.J.S., Cherres, D.F.V. (2022). Modelado matemático, simulación e implementación de pruebas en un motor DC labvolt. Polo del Conocimiento: Revista Científico-Profesional, 7(7): 997-1018. https://doi.org/10.23857/pc.v7i7.4270
[17] Hernández, C.G., Quijano, M.G. (2013). Obtención experimental de los parámetros del motor que se utilizará en el sistema de locomoción de una esfera rodante. Facultad Ingeniería Eléctrónica, Universidad Pontificia Bolivariana. http://hdl.handle.net/20.500.11912/504.
[18] Said, A., Félix-Herrán, L.C., Davizón, Y.A., Hernandez-Santos, C., Soto, R., Ramírez-Mendoza, R.A. (2022). An active learning didactic proposal with human-computer interaction in engineering education: A direct current motor case study. Electronics, 11(7): 1059. https://doi.org/10.3390/electronics11071059
[19] Ortega, J.D.C. (2018). Prototipo para modelar y controlar un motor DC. Visión electrónica, 12(1): 65-72. https://doi.org/10.14483/22484728.13754
[20] Marin, L., Vargas, H., Heradio, R., de La Torre, L., Diaz, J.M., Dormido, S. (2020). Evidence-based control engineering education: Evaluating the LCSD simulation tool. IEEE Access, 8: 170183-170194. https://doi.org/10.1109/ACCESS.2020.3023910
[21] Bjekic, M., Rosic, M., Šucurovic, M. (2024). GeoGebra tool: Development of applications for electrical machines and drives teaching support. International Journal of Engineering Education, 40(1): 23-37. https://www.researchgate.net/publication/378469270.
[22] García, S., Parejo, A., Gómez, A.A., Molina, F.J., Larios, D.F., León, C. (2020). Training equipment for automatic control systems and industrial automation subjects in engineering degrees. In 2020 XIV Technologies Applied to Electronics Teaching Conference (TAEE), Porto, Portugal, pp. 1-6. https://doi.org/10.1109/TAEE46915.2020.9163682
[23] Navarro-Durán, D., Félix-Herrán, L.C., Membrillo-Hernández, J., Craig, K.C., Ramírez-Cadena, M.J., Ramírez-Mendoza, R.A. (2023). Active learning to develop disciplinary competencies related to automatic control in engineering curricula using low-cost do-it-yourself didactic stations. Frontiers in Education, Frontiers Media SA, 7: 1022888. https://doi.org/10.3389/feduc.2022.1022888
[24] Kalaani, Y., Haddad, R.J., Guha, B. (2015). A hybrid simulation and hands-on experimentation for electric machines laboratory. In ASEE Southeastern Section Conference Gainesville. https://digitalcommons.georgiasouthern.edu/electrical-eng-facpubs/24/.
[25] Nenov, T.R., Evstatiev, B.I., Kadirova, S.Y. (2023). A remote lab for experimental study of DC motors. In 2023 18th Conference on Electrical Machines, Drives and Power Systems (ELMA), Varna, Bulgaria, pp. 1-4. https://doi.org/10.1109/ELMA58392.2023.10202417