Mohammed K. Hamzah*![]() | Safanah M. Raafat
| Safanah M. Raafat![]() | Shibly A. Al-Samarraie
| Shibly A. Al-Samarraie![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
While maintaining the stability of a nonlinear system is a difficult and complicated issue, it becomes even more complicated when considering the uncertainty of system parameters. To accomplish robust stability of such systems and satisfactory performance, it is required to continuously monitor the system measurements and provide periodic control actions, which is impractical in systems with limited communication bandwidth or processing capacity. This paper considers the use of event-triggered sliding mode control (ET-SMC) in controlling a nonlinear system that has the appealing property of updating the computed control action only if an event indicates that the control error exceeds a tolerable limit. Which notably saves computations in the control task while ensuring equivalent performance. First, the ET approach is used in combination with continuous time sliding mode control (CT-SMC). Next, the ET approach is used in combination with discrete time sliding mode control (DT-SMC). Then, a comparison is held between the two controllers to show the superiority of adding the ET technique to the designed controllers (CT-SMC and DT-SMC). In both cases, the well-known Zeno Phenomenon is a possible challenge that should be avoided. In this paper, waiting for a fixed amount of time after each sampling instant and checking a state-dependent criterion is the technique used in the transmission conditions to prevent the occurrence of the Zeno phenomenon. The simulation results demonstrate the effect of adding the ET strategy to the SMC in both continuous and discrete cases. The ET-based controllers developed in this study reduce the number of samples required to generate control action by approximately 98% as compared to the classical sliding mode control schemes. In addition to maintaining robust stability and satisfactory system performance in the presence of uncertainty.
event-triggered mechanism, continuous sliding mode control, discrete sliding mode control, inverted pendulum, robust trajectory tracking, asynchronous transmissions
The conventional feedback control is commonly using sampling criterion that rely on time-periodic decision rules, which can sometimes be overly conservative. However, there are circumstances in which centralized sampling is impractical or even deleterious. When dealing with large-scale systems, this becomes especially important because of the lack of resources and transmission bandwidth for decentralized control or because of the lack of suitable processing capacity in rapid systems. A new method has arisen to deal with these problems by only sampling when it is absolutely required to do so. The stability and convergence of the system must be maintained even if the periodicity for computing the control law is relaxed.
As a result, research on mechanisms for sampling that do not rely on periodicity or time-triggering procedures is gaining momentum. Because of this, event-driven feedback and sampling methods have been developed in recent years.
The defining feature of these methods is that the decision to execute the control task is not made ad-hoc but is instead based on a specific condition of the system's state [1].
Event-triggered Control (ETC) was first introduced by Åström et al. [2] and received significant attention from researchers. The methodologies of ETC have since been applied to many continuous-time systems, as demonstrated in recent works for example, event triggered input is used to compensate actuators failure by Xing et al. [3], adaptive control that is based on event triggered sampling is used to control saturated nonlinear systems with time varying state constraints [4], and uncertain stochastic nonlinear systems with actuator failures is controlled successfully using event trigger fuzzy adaptive controller by Liu et al. [5]. The aforementioned studies mainly focus on the case from the controller to the actuator in continuous-time systems. The primary design strategy involves constructing an ideal continuous control input signal approach and then applying the corresponding triggering mechanism to the continuous controller to derive the ETC system. This approach can also be observed in self-triggered control for linear systems [6], event-triggered and self-triggered control over actuators and sensor networks [7], and self-triggered-full information H-infinity controller [8].
Utilizing limited network bandwidth sufficiently is a significant challenge in networked control systems, as widely acknowledged in the literature. To address this challenge, numerous communication protocols have been developed, such as moving-horizon estimation for linear dynamic networks using binary encoding schemes [9], master-slave synchronization of heterogeneous systems under scheduling communication [10]. Resilient control design based on a sampled-data model for a class of networked control systems under denial-of-service attacks is discussed by Zhang et al. [11]. A survey of the trends and techniques of networked control systems is given by Zhang et al. [12]. In addition, a popular protocol that is based on event-triggered strategy, is demonstrated in several works [13-17], in which the communication access is released only when the pre-designed event occurs through the event generator. Furthermore, robust energy efficiency control for wireless sensor networks can be achieved via unity sliding mode control is considered by Raafat et al. [18].
The Sliding Mode Control (SMC) approach has been widely studied due to its capability to stabilize dynamical systems subject to external disturbances and nonlinearities, receiving good attention in both theoretical research [19-25] and engineering applications [26-29]. However, none of the above-mentioned works have provided a clear study and analysis of using SMC for both system types, namely continuous and discrete, and very few of them consider a nonlinear process with its model complications and the uncertainty that occurs in its parameter values.
Recently, researchers have introduced the event-triggered mechanism into SMC, resulting in a new approach named event-triggered SMC (ET-SMC). In addition to the main features of ET technique in reducing the control effort, and communication overload, hence reducing energy consumption in the system. Combining event-triggered control with sliding mode control produces a novel strategy that can offer several benefits of sliding mode and solve various issues in nonlinear systems. The most important one is that it makes the whole system more resilient to uncertainties and disturbance and well-suiting nonlinear systems with complicated dynamics and unidentified environments. However, this added feature increases the system's complexity and requires careful consideration of several aspects in the design process. Such as affecting the reachability of the sliding surface and the stability of the sliding-mode dynamics, requiring a deeper understanding of modeling techniques to optimize their potential and conquer associated challenges [30]. Although continuous event-triggered SMC can stabilize closed-loop systems subject to external disturbances with less communication frequency, it can only ensure practical sliding mode but not achieve normal sliding mode [31, 32]. Various continuous event-triggered SMC techniques have been reported in the literature, such as static event-triggered SMC [30, 33], self-triggered SMC [34], periodic event-triggered SMC [35], dynamic event-triggered SMC [36], and invariant sets in SMC theory [37], depending on different event-triggering conditions.
The majority of cited works exhibit a flaw in their methodology, which can be attributed to the researchers' reliance on linear systems in their applications. In addition, most researchers utilize continuous design as opposed to discrete systems, which are considered fundamental for event-triggered control. The main aims of this article can be summarized in the following points:
The remainder of this paper is as follows: Section 2 explains the fundamentals of (ET-SMC) and triggering mechanism design, while Section 3 describes the mathematical modeling of the pendulum system. In Section 4, the design SMC and closed-loop stability analysis are presented. In Section 5, the results and analysis are presented, using four examples to evaluate the validity of the proposed methodology. Comparison between the two proposed controller is given in Section 6. The paper concludes with a summary of the main conclusions and suggestions for future research.
The sliding mode control (SMC) technique is known for its robustness in achieving stabilization against matched disturbance in continuous-time systems. However, this robustness may not hold in the digital implementation of SMC, which relies on the concept of a continuous sliding surface. There are several challenges might encounter when SMC implemented digitally, such as discretization which might cause approximation inaccuracies. Sampling rate and discretization method directly affect the control performance of the system. Another challenge is the chattering phenomenon that occurs when sliding mode control rapidly shifts between two values. In digital systems, chattering can cause high-frequency oscillations that decrease performance and damage actuators. Also, it’s not easy to design a sliding surface in digital systems that guarantees robustness and can be computed in real time. Sliding mode control is computationally intensive depending on system complexity and control law, thus real-time computations can be a challenge. Moreover, in digital implementation of SMC the system trajectory may slide near the sliding manifold (creating sliding band) which represent another challenge [38].
Various methods and approaches have been proposed in literature to minimize the sliding band and enhance precision in SMC. However, a much better outcome can be achieved by using an innovative control implementation method, known as the event-triggering technique. This approach updates the control only when a specific stabilizing condition is breached, ensuring constant system stability. Implementing SMC using event-triggering techniques produces a resilient performance and utilizes minimal control system resources. Therefore, the event-triggering approach has emerged as a well-liked control implementation method for realizing this technique [39]. To generate the potential triggering moment, continuous state measurements are necessary, which can be impractical due to the computational burden and the need for advanced sensors. To avoid these problems, various methods have been proposed, such as the self-triggering technique, which is similar to the ET technique in terms of not requiring continuous measurements. However, it relies on the system's ability to determine when to take control actions depending on its own internal state or circumstances. Whereas, certain criteria are used to trigger an event and update the control action in the case of the ET technique. Both techniques have positive aspects and can be used in various scenarios to make the best use of the available resources while maintaining optimal performance. However, this paper is more focused on the ET technique [40].
Furthermore, a new approach has been developed based on the discrete-time model of the continuous-time system, resulting in what is known as discrete-time sliding mode control (DT-SMC) [41], where discrete time samples are taken of both system's states and control input. Unlike DT-SMC, which updates the control signal at regular intervals, ET-SMC only does so when certain conditions are satisfied; hence, ET-SMC may be seen as a special case of DT-SMC.
Due to its nonlinearity and complicated dynamics, the pendulum system is a typical and frequently studied example in control theory. Its inherent nonlinearity and uncertain dynamics make it a valuable demonstration for prospective real-world applications and perfect for evaluating the ET-SMC technique [41]. In this article, a pendulum's nonlinear system, schematized in Figure 1, is considered as a case study to demonstrate the theory discussed.
Figure 1. Simple pendulum system
Figure 2. The proposed ET-SMC scheme
2.1 Triggering mechanisms of event-based control
One of ETC's main difficulties is designing a suitable event triggering mechanism guaranteeing minimum inter-event time to avoid Zeno phenomena. There are several triggering mechanisms discussed in the literature [40]. Fixed triggered, which is one of the most widespread, is considered in this paper. When combined with event-triggered control as shown in Figure 2, the send-on-delta technique further optimizes the utilization of resources by efficiently transmitting data changes. This allows for consistent synchronization of data at the destination in real time [41]. Fixed triggered has a constant delta value $(\delta)$, and the reference signal is the last sent value. This strategy is named the basic Send on Delta strategy (SoD), and its implemented model is given below:
$s(t)=1$, if $\left\|x_{I s}-x(t)\right\| \geq \delta$ (1)
$s(t)=0$ if $\left\|x_{l s}-x(t)\right\| \leq \delta$ (2)
where, $s(t)$ is send function of data at instant $t$. The expression of Eq. (1) is used as a trigger function. When the difference between the current value at time $(t)$ and the last transmitted value at time $\left(t^{\prime}\right)$ is greater than the threshold, then the value of the sensor is transmitted. In this work, we choose the value of this threshold $(\delta)$ is equal to $(0.01)$ to ensure the minimum inter-event time.
Considering the pendulum system illustrated in Figure 1 and the model is given in Eq. (3) below:
$\ddot{\theta}=-\operatorname{asin}(\theta)-b \dot{\theta}+c \dot{T}+c d(t)$ (3)
By considering the torque $(\mathrm{T})$ as the control input $(\mathrm{u})$. Suppose that the input ($u$) is applied at the pinned end of the pendulum and that is required to stabilize the pendulum at an angle $\theta=\theta_f$ by choosing the state variables as:
$x_1=\theta-\theta_f, \quad x_2=\dot{\theta}$ (4)
Knowing that $\theta_f$ is constant, and the control variable $(u=T)$. Then Eq. (3) can be rewritten as:
$\begin{gathered}\dot{x}_1=x_2=\dot{\theta} \\ \dot{x}_2=-\operatorname{asin}\left(x_1+\theta_f\right)-b x_2+c u+c d(t)\end{gathered}$ (5)
The controller design aims to translate the pendulum to the angle position $\theta_f$, and maintain it at this angle in the presence of the disturbance $(d(t))$.
3.1 Sliding mode controller design
By forcing the system's state trajectory to a predetermined sliding surface where the dynamics become more predictable and insensitive to perturbs and uncertainties, SMC can manage uncertain and nonlinear systems reliably [38]. In sliding mode control, the control law consists of two important phases: (i) reaching phase, and (ii) sliding mode phase. When the system state is driven from any initial state to reach the switching manifold in finite time, then such phase is called reaching phase, and when the system is induced into the sliding motion on the switching manifolds, then such phase is defined as sliding mode phase. The two phases of sliding mode control can be observed in Figure 3, where s represents the continuous-time sliding variable:
$s=s(x)$ (6)
The sliding manifold can be defined by:
$\Omega_s=s=\{x \mid s(x)=0\}$ (7)
The following characteristics should exist to induce the sliding mode. Two conditions must be satisfied for sliding mode control: (i) the stability of the system should be constrained to the sliding surface, and (ii) the sliding motion must begin within a finite time. A sufficient condition for the system to slide along the specified surface is expressed as follows:
$s \dot{s}<0$ (8)
where, $\dot{s}$ the rate of change of the sliding variable $(s)$. Let us consider the continuous-time pendulum system is given by:
$\dot{x}_1=x_2, \dot{x}_2=-a \sin \left(x_1+\theta_f\right)-b x_2+c u+c d(t)$
The first step in SMC design is the selection of a sliding variable:
$s(x)=\lambda x_1+x_2, \lambda>0$ (9)
Figure 3. The sliding mode control phases
The controller $u$ designed according to the following design considerations:
The pendulum system parameters are certain, and a perturbation is acting on the pendulum. When sliding variable (s) equals zero ($s=0)$, the origin is an asymptotically stable point. In the present work, the system parameters are taken as follows: $a_0=\left(1 \_10\right), b_o=\left(0.5 \_1\right), c_o=\left(5 \_10\right)$ and let $d(t)=1$, by differentiating the function $s$ with respect to time $t$, this yields:
$\dot{s}=-a_o \sin \left(x_1+\theta_f\right)-b_o x_2+c_o u+\delta(t, x, u)+\lambda x_2$ (10)
where, $\delta$ is the perturbation.
Let,
$v=-a_o \sin \left(x_1+\theta_f\right)-b_o x_2+c_o u+\lambda x_2$ (11)
$s=\dot{s} s[v+\delta]$ (12)
Let
$v=-k \operatorname{sign}(s), k>0$, (13)
Then we have,
$s \dot{s}=-\mathrm{k}|\mathrm{s}|+\delta \mathrm{s} \leq-|\mathrm{k}||\mathrm{s}|+|\mathrm{s}||\delta|=-|\mathrm{s}|[\mathrm{k}-|\delta|]$ (14)
Finally, the control action can be obtained by taking $(k>$ $\delta)$ and then:
$u=\frac{1}{c_0}\left[-a_o \sin \left(x_1+\theta_f\right)+\left(b_o-\lambda\right) x_2-k \operatorname{sign}(s)+d(t)\right]$ (15)
The main issue with continuous-time SMC is that a high frequency switching, discontinuous control term is commenced once the closed-loop system states reach to the sliding surface this results in chattering phenomena. This phenomenon happened due to many reasons where switching time delay, controller computation delay, dynamics of plant elements such as actuator and sensor are among the main causes. Chatter does not have a desirable effect on plant performance as it can cause heat loss and wear on moving parts of machines.
3.2 Stability analysis
Since traditional approaches, may not be relevant to nonlinear and uncertain systems, Lyapunov functions are sometimes used instead. Lyapunov stability is indicated by the existence of a positive-definite function whose time derivative along the system's trajectory is negative-definite [37]. Before diving further into the stability analysis, it is convenient to introduce the following definitions:
Definition 1 (attractiveness)
The set $\left(\Omega_{\varepsilon}\right)$ which defined as $\{x:|s|<\varepsilon\}$ is said to be attractive if the sliding variable $s$ satisfies the $\eta$-reaching condition of Eq. (8)
$s \dot{s} \leq-\eta|\mathrm{s}|$
where, $\eta$ is a positive design scalar. The expression above is called the $\eta$-reachability condition. The reachability requirement is a crucial criterion in the sliding mode literature since it ensures the existence of the sliding mode [38].
Moreover the $\Omega_{\varepsilon}$ is a positively invariant set [37]. Theoretically, any effective controller will attempt to move the state back to the origin, or at least to a positive invariant set that does include the origin. In addition, the controller will designate a certain area, the "area of attraction," that centers around the origin. The Definition 1 can be proved by using the Lyapunov function as follows:
Let $V=\frac{1}{2} s^2$ be the candidate Lyapunov function, also let $t_{r \varepsilon}$ is the reaching time to the $\varepsilon$ boundary layer then:
$\dot{V}=s \dot{s}<\eta|s|<0 \Rightarrow V(t)<V\left(t_{r \varepsilon}\right)$ (16)
or, $\frac{1}{2} s^2<\frac{1}{2} \varepsilon^2$, which implies that $|s|<\varepsilon, \forall t>t_{r \varepsilon}$ and that means that $\Omega_{\varepsilon}$ is a positively invariant set.
Figure 4. Behavior of the pendulum system
Considering Figure 4, we can explain the concept of stability for the model (pendulum system) through which this strategy was implemented. The Event triggered scheme is applied when the state is inside $\Omega_{\varepsilon}$ via the following rule:
$u_{i+1}=u_i$ if $e_{i+1} \in \Omega_{\varepsilon}$.
Else $u_{i+1}$ is updated according to the derived control law in Eq. (15). Moreover, due to the discretization, the actual positively invariant set is given by $\hat{\Omega}_{\varepsilon}=\{x:|| s \mid<\delta\}$, where, $\delta>\varepsilon$. Eventually, the steady-state error is ultimately bounded by $|\mathrm{e}|<(\delta / \lambda)$ [37].
Before diving into the design of the various controllers proposed in this paper, it is important to note that sign function produce a discontinuity in the control input. This can result in the undesirable chattering phenomenon, for which the saturation function sat() is one possible remedy. A saturation function that approximates the sign() term in a boundary layer of the sliding surface replaces the discontinues control law. This solution is investigated in greater detail in the subsequent sections on designed controllers [29].
After deriving the mathematical model for the pendulum system and entering the values of the variables, the algorithm for the ET-SMC algorithm was built using MATLAB codes. The first type is represented by the design of continuous-time SMC (CT-SMC). Four cases are studied; Case 1 and Case 2 consider the design analysis of CT-SMC with sign function with and without applying the event condition. Case 3 and Case 4 consider the design analysis of CT-SMC with Sat function with and without applying the event condition.
Case 1: Design CT-SMC using sign (s) function
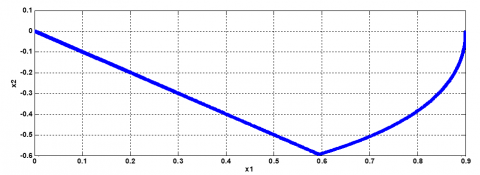
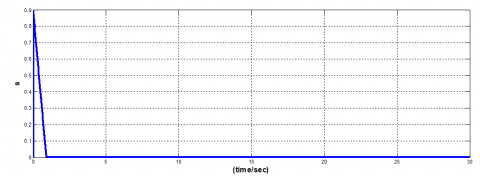
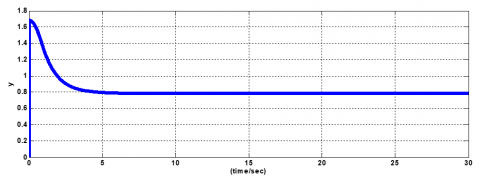
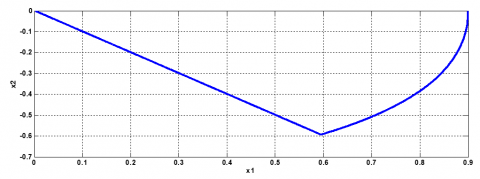
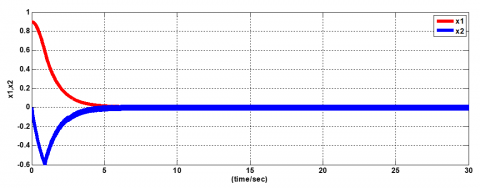
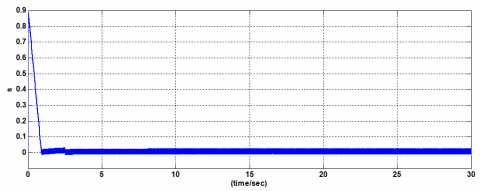
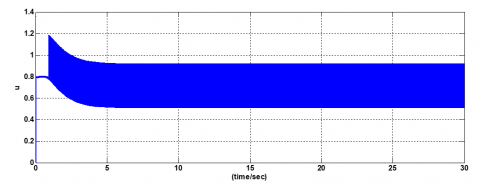
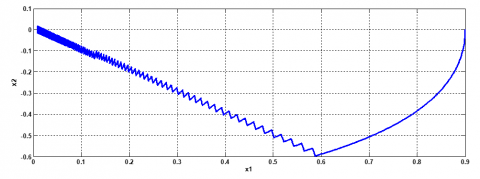
In this case, control action obtained by applying Eq. (15) above is considered. The error states $\left(x_1\right.$ and $\left.x_2\right)$ are shown together in Figure 5. It is obvious that the error states approach the origin. Figure 6 shows the switching function behavior. The reaching time (time needed to reach the switching manifold) is clearly less than (0.9 sec). The rest of the time, the system will move in a zigzag behavior until it reaches the Origin. The magnified part of Figure 6 is to clarify this point, it shows how the sliding mode controller switches above and below the switching manifold. This is called the chattering behavior and will be eliminated in Case 3. In Figure 7, the discontinuous part in the control action (u) will start to function when the system states reach the switching manifold in about (0.9sec). Also, this behavior is illustrated in the number of updates for the control action which is in this case equals 30000. In Figure 8, it can be seen that the SMC can derive the angle $(\theta)$ to track the reference angle $\left(\theta_f=45\right)$ in about $(7 \mathrm{sec})$. Figure 9 shows the system's phase plane with the controller. It can see that the system starts from its initial point (start point) until reaching the switching manifold (reaching mode). After that, it will slide down to the origin (sliding mode).
Figure 5. Error states (x1, x2) for a SMC design Case 1
Figure 6. Switching function (s) Case 1
Figure 7. Time history for control action (u) Case 1
Figure 8. Time history of pendulum angle (θ) Case 1
Figure 9. Phase plane sketch with SMC design for Case 1
Case 2: Design of CT-SMC using sign function with event triggered technique
In this case, we apply the event condition given in Eq. (1) which is chosen as $\delta>0.01$. The results obtained in Case 1 are similar to the results obtained in this case, except for the number of updates to the control action (u). This number decreased significantly from ( 30000 to 891 ) due to the use of the event condition. In addition, the appearance of the chattering phenomenon will be processed in Case 3. A precise comparison between Case 1 and Case 2 is given in Table 1 below.
Table 1. Comparison of Case 1 and Case 2
|
$\delta$ |
$x_1$ |
$x_2$ |
s |
u |
Updates of u |
|
|
9.2×10-4 |
4.9×10-4 |
0.002 |
0.51 |
30000 |
|
0.01 |
9.2×10-4 |
4.9×10-4 |
0.002 |
0.507 |
891 |
Case 3: Design CT-SMC by using sat function
The problem of the chattering phenomenon appears in Case 1 and Case 2, can be improved by using infinite gain of the relay represented by the sign function. The sign function can be replaced with any Sigmoidal function (acting like an S shape or atan function) to remove the chattering behavior. The sat function is chosen to replace the sign function in the control law, so that control law in Eq. (15) will be rewritten as:
$u=\frac{1}{c_o}\left[-a_o \sin \left(x_1+\theta_f\right)+\left(b_o-\lambda\right) x_2-k \operatorname{sat}(t)+d(t)\right]$ (17)
where, sat is saturation function with unit limit and unit slope and is given by sat $=s / \emptyset$. The algorithm used in Cases 1 and 2 is repeated by using the new function (sat) and new control law (Eq. (17)) with the best value of $\emptyset$. Here we choose $(\emptyset=$ 0.004) to reduce the steady-state error in the response of the pendulum angle and obtain good performance. It can be noticed in Figures 10-13 that the controller succeeded in achieving the objective of driving the pendulum angle to the desired value. The switching function s is shown in Figure 11, and it is clear that the response is chattering-free and can reach the switching manifold in less than (0.9 sec). The control action u is shown in Figure 12, its profile has no zigzag behavior due to the continuous part (sat) instead of the sign function. Also, the number of updates for control action u is 30000, and the phase plot of the system is shown in Figure 14.
Figure 10. Error states (x1, x2) for a SMC design Case 3
Figure 11. Switching function (s) Case 3
Figure 12. Time history for control action (u) Case 3
Figure 13. Time history of pendulum angle (θ) Case 3
Figure 14. Phase plane sketch for Case 3
Table 2. Comparison of Case 3 and Case 4
|
CSMC Used sat (s) Function Without Event Condition |
||||||
|
$\delta$ |
$\emptyset$ |
$x_1$ |
$x_2$ |
s |
u |
Updates of u |
|
|
0.01 |
0.005 |
-1.3×10-13 |
0.005 |
0.617 |
30000 |
|
|
0.004 |
0.002 |
-1.3×10-13 |
0.002 |
0.617 |
30000 |
|
CSMC Used sat (s) with Event Condition (Improved) |
||||||
|
0.01 |
0.01 |
0.005 |
-1.3×10-13 |
0.005 |
0.610 |
891 |
|
0.01 |
0.004 |
0.002 |
-1.3×10-13 |
0.002 |
0.608 |
891 |
Case 4: Design CT-SMC by using sat function based even triggered
In this case, we apply the event condition given in Eq. (1) where $\delta$ is chosen to be greater that 0.01 . The results obtained in Case 3 are similar to the results obtained in this case, except for the number of updates to the control action (u), which decreased significantly from 30000 to 891 due to the use of the event control approach. All results for Cases 3, and 4 with and without event conditions can be shown in Table 2.
4.1 CT-SMC results discussion and analysis
The application of event triggered technique in combination with CT-SMC is considered in this section and the simulation experiments conducted for four cases to analyze the effect of adding the event trigger condition in addition to analyzing the effect of using sat function in the design to reduce chattering. Adding event triggered condition in Case 2, has maintain same values as for $x_1=9.2 \times 10^{-4}, x_2=4.9 \times 10^{-4}$, and $u=$ 0.51 as compared to Case 1 , while reducing the number of updates rapidly from being 30000 in Case 1 to 891 in Case 2. Which is the main objective of adding event triggered condition in this work.
Similar effect is acquired by comparing Case 3 and Case 4 which consider the design of CT-SMC using sat function with and without applying the event condition. That the application of event triggered technique has maintain same values for $x_1$, $x_2$, and $u$, while reducing the number of updates rapidly from being 30000 in Case 3 to 891 in Case 4 .
Thus, Considering Case 2 and Case 4 is clearly highlighting the effect of adding event triggered technique in combination with CT-SMC where the number of control action updates are reduced by almost 34%. Moreover, Figure 11, which depicts the switching function s, makes it abundantly evident that the response lacks any form of chattering and can get to the switching manifold in less than (0.9 sec). As can be seen in Figure 12, the control action u does not exhibit any zigzag behavior in its profile since the sign function has been replaced with a continuous element (sat). Tables 1 and 2 provide more numerical information that reflect ET technique. Noting that the plant and controller sample times are both 0.0001.
Low switching frequencies are typically necessary in discrete-time sliding mode control since there is limited sampling frequency, making it more practical for implementation. Also, in DT-SMC, the control signal is calculated at each sampling period and remains constant during that whole interval. Consequently, the system state trajectory cannot move along the sliding surface, but instead follows a zigzag motion about the sliding surface, known as quasi-sliding mode motion.
The procedure for designing DT-SMC involves the following steps: (i) designing the sliding surface, (ii) developing a reaching law, and (iii) creating a control law that guides the system states to slide along a predetermined sliding surface over a finite interval of time. Finally, after implementing the designed DT-SMC procedure, the system state-space in Eq. (17) can be rewritten as follows:
$\begin{gathered}u_{k \tau}=\frac{1}{c_o}\left[a_o \sin \left(x_1+\theta_f\right)+\left(b_o-\lambda\right) x_2-k \operatorname{sign}(s)\right. +d(\tau)]\end{gathered}$ (18)
Four cases are considered to study and analyze the DT-SMC developed in this section. Case 1 and Case 2 consider the design analysis of DT-SMC using the sign function with and without applying the event condition, while Case 3 and Case 4 consider the design of DT-SMC using the Sat function with and without applying the event condition. Further investigation of the results is given in Tables 3 and 4. All the simulation experiments are conducted with plant sampling time (dt) equal to 0.0001 and controller sampling time (d) equal to 0.01.
Case 1: Design of DT-SMC using sign function
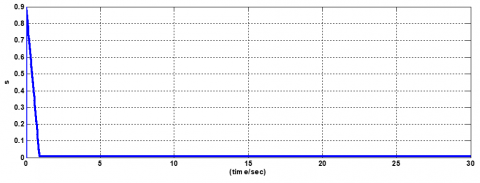
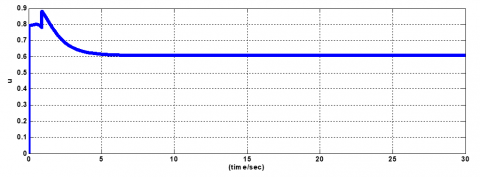
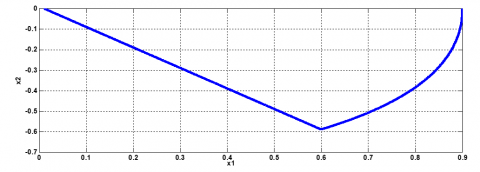
In this case, control action obtained by applying Eq. (18) is considered. The system error behavior represented by the states $\left(x_1, x_2\right)$ is shown in Figure 15. It is obvious here how the error states approach the origin. Figure 16 shows the switching function behavior. The reaching time (time needed to reach the switching manifold) is clearly less than 0.8 sec. The remaining time, the system will move in a zigzag pattern until it reaches the origin. To elucidate this point, a magnified portion of Figure 16 is presented, illustrating how the sliding mode controller varies above and below the switching manifold. This is called the chattering behavior and will be eliminated in Case 3 by replacing the sign function in the control law by sat function. In Figure 17 the discontinuous part of the control action (u) will start functioning when the system states reach the switching manifold (about (0.9 sec). In Figure 18, it can be seen that the controller can derive the angle $(\theta)$ to track the reference angle (θf=45) in about (5.7 sec). Moreover, the number of updates for control action is found to be (3000) which is less than its value when CT SMC is used. Figure 19 depicts the phase plane of a closed-loop system; it is evident that the system begins at its initial value, reaches the switching manifold, and then slides to the origin (sliding mode).
Figure 15. Error states (x1, x2) for a SMC design Case 1
Figure 16. Switching function (s)
Figure 17. Time history for control action (u) Case 1
Figure 18. Time history of pendulum angle (θ) Case 1
Figure 19. Phase plane with SMC design for Case 1
Table 3. Comparison of Case 1 and Case 2
|
(DT-SMC) Used Sign and Without Event Condition |
||||||
|
$\delta$ |
$\emptyset$ |
$x_1$ |
$x_2$ |
s |
u |
Updates of u |
|
|
|
0.0089 |
-0.0149 |
0.0039 |
0.51 |
3000 |
|
(DT-SMC) Used Sign with Event Condition (Improved) |
||||||
|
0.01 |
0.001 |
0.0014 |
$-4.9949 \times 10^{-4}$ |
0.0029 |
0.508 |
90 |
Case 2: Design of DT-SMC using sign function with applying event condition
The algorithm in Case 1 is repeated in this case but with the application of the event condition given in Eq. (1). The threshold value δ is chosen to be greater than 0.01. The results obtained in in this case are shown to be similar to Case 1 except for the number of updates occurred in the control action, which decreased significantly from 3000 to 90 due to the use of the event condition. It should be noted here, that the chattering phenomenon appeared in the control action behavior of Cases 1 and 2 will be processed in Cases 3 and 4. A comparison between the main outcomes of Case 1 and Case 2 is given in Table 3.
Case 3: Design of DT-SMC using sat function
In this case, sat function is used to replace the sign function in the control law given in Eq. (18) in order to eliminate chattering phenomena. Hence, Eq. (18) will be rewritten as follows:
$\begin{gathered}u_{k \tau}=\frac{1}{c_o}\left[a_o \sin \left(x_1+\theta_f\right)+\left(b_o-\lambda\right) x_2-k \operatorname{sat}(s)\right.+d(\tau)]\end{gathered}$ (19)
The previous algorithm is repeated here by using the control law given in Eq. (19) above with selecting best value of ($\emptyset$) which is chosen to be equal to 0.02 to reduce the steady-state error. Recall that $\emptyset$ is a parameter related to sat function.
It can be noticed that the controller succeeded in achieving its objective in driving the pendulum angle to its desired value as demonstrated in Figure 20-23. The chattering free response of the switching function s is depicted in Figure 21 this is due to the use of sat function and as shown in Figure 21 it reaches the switching manifold in less than (0.8 sec). The control action is shown in Figure 22, where no zigzag behavior is shown due to the continuous part sat instead of the sign function. Furthermore, the number of updates for control action is found to be 3000. Finally, the phase plot of the system states is depicted in Figure 24.
Figure 20. Error states (x1, x2) for a SMC design Case 3
Figure 21. Switching function (s) Case 3
Figure 22. Time history for control action (u) Case 3
Figure 23. Time history of pendulum angle (θ) Case 3
Figure 24. Phase plane of system states with Case 3
Case 4: Design of DT-SMC using sat function with event condition
In this case, the same event condition given in Eq. (1) used before is applied here with the same threshold value (δ>0.01). The results obtained in this Case is almost the same as Case 3 except for the number of updates occurred at the control action, which decreased significantly from being 3000 to 90 due to the use of event based control approach. A brief comparison between Case 3 and Case 4 results are given in Table 4.
Table 4. Comparison of Case 3 and Case 4
|
(DT-SMC) with (sat) Without Event Condition |
||||||
|
$\delta$ |
$\emptyset$ |
$x_1$ |
$x_2$ |
s |
u |
Updates of u |
|
|
0.02 |
0.01 |
-1.3×10-13 |
0.01 |
0.6 |
3000 |
|
(DT-SMC) with (sat) and with Event Condition (Improved) |
||||||
|
0.01 |
0.002 |
0.001 |
-1.3×10-13 |
0.001 |
0.61 |
90 |
5.1 DT-SMC results discussion and analysis
Simulation experiments were run for four different scenarios to examine the impact of incorporating an event trigger condition into discrete SMC and the impact of incorporating a sat function into the design to minimize chattering.
It should be noted that the implementation of the eventtriggered technique in Case 2 has reduced the values of the system states $x_1, x_2$ thereby reducing the system's error and resulting in improved performance. In terms of numbers, the state $x_1$ is decreased from $x_1=0.0089$ to $x_1=0.0014$, and the state $x_2$ decreased from $x_2=0.0149$ to $x_2=4.9949 \times$ $10^{-4}$ while $u=0.51$ remains nearly the same in Case 2 compared to Case 1. As shown in Table 3, The inclusion of an event-triggered condition in the design of a discrete control strategy reduces the number of control action updates from 3000 in Case 1 to 90 in Case 2, which is the primary objective of this study.
Comparing Case 3 and Case 4, which consider the design of DT-SMC using the sat function with and without the event condition, yields the same outcomes as shown in Table 4, while the number of updates were 3000 in Case 3 and 90 in Case 4, thereby reducing the number of updates significantly, which is main target of this work.
Considering Cases 2 and 4 highlights the effect of adding an event-triggered technique to DT-SMC, in which the number of control action updates is reduced by nearly 97%. Moreover, comparing Case 1 and Case 2 with Case 3 and Case 4 highlights the effect of using sat function instead of sign. Figure 16 depicts the behavior of the switching function. Clearly, the reaching time required to reach the switching manifold is less than 0.8 seconds. The system will continue to move in a zigzag pattern until it reaches the origin this is known as chattering behavior, and it will be eliminated in Case 3 and Case 4 by substituting sat function for sign function in the control law. Figure 21 displays the chattering-free response of the switching function s. This is due to the use of the sat function, and as shown in Figure 21 it reaches the switching manifold in less than (0.8 sec). The control action is shown in Figure 22, where there is no zigzag behavior because the sign function has been replaced by a continuous part sat. Tables 1 and 2 provide additional numerical information.
Both controllers designed in this paper aim to translate the pendulum to the angle position $\theta_f$ and maintain it at that position in the presence of disturbance d(t) and uncertainty, while consuming the least amount of energy in the central processing unit where the control action is actually computed. To analyze the results obtained from both types of controllers, first of all the chattering problem has been eliminated in both controllers using sat function. However, in CT-SMC high-switching frequency takes place can cause damage to the system, so it is better to implement the discrete-time algorithms rather than continuous-time algorithms for practical applications. DT-SMC has relatively low switching frequencies hence they are more practical to implement. Moreover, the main contribution of this work is represented by reducing the total number of updates in the control action (u) by adding the event condition, this is clearly demonstrated in the first type designed (CT-SMC), where the number of the control actions has been reduced from 30000 without event condition to 891 with adding event condition. Whereas for the other type of controller (DT-SMC), the number of updates in the control action has been reduced from 3000 without event condition to 90 with applying event condition as given in Table 5. This reduction is reflected in reducing the arithmetic operations that occur through central processing control unit (CPU) thus reduce the energy consumed by the system. Table 5 is showing a comparison of the control action updates in both controllers considered in this study.
Table 5. Comparison between CSMC and DT-SMC
|
Type of Controller |
No. of Updates in Control Action (u) |
|||
|
Case 1 |
Case 2 |
Case 3 |
Case 4 |
|
|
CSMC |
30000 |
891 |
30000 |
891 |
|
DT-SMC |
3000 |
90 |
3000 |
90 |
In this paper, the robustness and superiority of event-based control techniques are investigated and analyzed through the development of an event-triggered sliding mode controller. This approach is shown to be effective by applying it to a nonlinear model of a pendulum system and by considering both continuous and discrete time systems using CT-SMC and DT-SMC, respectively. A comparison of DT-SMC and CSMC with and without the application of the event-based technique to demonstrate the impact of this technique on both types of systems. The obtained results demonstrate that reduced control actions are required when event-based techniques are utilized without compromising control performance. This reduces the number of arithmetic operations conducted by the central processing unit and, consequently, the amount of energy used. Also, the proposed design considers two unavoidable system's problems and suggests effective solutions for minimizing their effect: the chattering problem that accompanies sliding mode technique, which is circumvented using the sat function in the design, and the well-known Zeno behavior, which is avoided by implementing minimum time intervals between consecutive triggering events.
Following is a list of relevant topics for future research:
|
SMC |
Sliding Mode Control |
|
|
EBC |
Event Based Control |
|
|
DT-SMC |
Discrete Time Sliding Mode Control |
|
|
ET-SMC |
Event Triggered Sliding Mode Control |
|
|
EB-SMC |
Event Based Sliding Mode Control |
|
|
SoD |
Send of Data |
|
|
ETC |
Event Triggered Control |
|
|
Greek symbols |
||
|
$\theta$ |
Position |
|
|
$\delta$ |
Threshold value of error |
|
|
$\lambda$ |
constant |
|
|
$\Omega$ |
Boundary of the sliding manifold |
|
|
$\eta$ |
Reaching factor |
|
|
$\widehat{\Omega}$ |
Invariant set |
|
|
Subscripts |
||
|
ls |
Last state |
|
|
$f$ |
Final position |
|
|
$\varepsilon$ |
Boundary of attractive region |
|
|
o |
Nominal parameter |
|
[1] Astrom, K.J., Bernhardsson, B.M. (2002). Comparison of Riemann and Lebesgue sampling for first order stochastic systems. In Proceedings of the 41st IEEE Conference on Decision and Control, Las Vegas, USA, pp. 2011-2016. https://doi.org/10.1109/CDC.2002.1184824
[2] Åström, K.J., Bernhardsson, B. (1999). Comparison of periodic and event based sampling for first-order stochastic systems. IFAC Proceedings Volumes, 32(2): 5006-5011. https://doi.org/10.1016/S1474-6670(17)56852-4
[3] Xing, L., Wen, C., Liu, Z., Su, H., Cai, J. (2017). Adaptive compensation for actuator failures with event-triggered input. Automatica, 85: 129-136. https://doi.org/10.1016/j.automatica.2017.07.061
[4] Wang, L., Chen, C.P., Li, H. (2018). Event-triggered adaptive control of saturated nonlinear systems with time-varying partial state constraints. IEEE Transactions on Cybernetics, 50(4): 1485-1497. https://doi.org/10.1109/TCYB.2018.2865499
[5] Liu, Z., Wang, J., Chen, C.P., Zhang, Y. (2018). Event trigger fuzzy adaptive compensation control of uncertain stochastic nonlinear systems with actuator failures. IEEE Transactions on Fuzzy Systems, 26(6): 3770-3781. https://doi.org/10.1109/TFUZZ.2018.2848909
[6] Mazo, M., Anta, A., Tabuada, P. (2009). On self-triggered control for linear systems: Guarantees and complexity. In 2009 European Control Conference (ECC), Budapest, Hungary, pp. 3767-3772. https://doi.org/10.23919/ECC.2009.7074986
[7] Mazo, M., Tabuada, P. (2008). On event-triggered and self-triggered control over sensor/actuator networks. In 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, pp. 435-440. https://doi.org/10.1109/CDC.2008.4739414
[8] Lemmon, M., Chantem, T., Hu, X.S., Zyskowski, M. (2007). On self-triggered full-information h-infinity controllers. In: Bemporad, A., Bicchi, A., Buttazzo, G. (eds) Hybrid Systems: Computation and Control. HSCC 2007. Lecture Notes in Computer Science, vol. 4416. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-71493-4_30
[9] Liu, Q., Wang, Z. (2020). Moving-horizon estimation for linear dynamic networks with binary encoding schemes. IEEE Transactions on Automatic Control, 66(4): 1763-1770. https://doi.org/10.1109/TAC.2020.2996579
[10] Wen, G., Wan, Y., Cao, J., Huang, T., Yu, W. (2016). Master–slave synchronization of heterogeneous systems under scheduling communication. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 48(3): 473-484. https://doi.org/10.1109/TSMC.2016.2599012
[11] Zhang, X. M., Han, Q.L., Ge, X., Ding, L. (2019). Resilient control design based on a sampled-data model for a class of networked control systems under denial-of-service attacks. IEEE Transactions on Cybernetics, 50(8): 3616-3626. https://doi.org/10.1109/TCYB.2019.2956137
[12] Zhang, X.M., Han, Q.L., Ge, X., Ding, D., Ding, L., Yue, D., Peng, C. (2019). Networked control systems: A survey of trends and techniques. IEEE/CAA Journal of Automatica Sinica, 7(1): 1-17. https://doi.org/10.1109/JAS.2019.1911651
[13] Ding, D., Wang, Z., Han, Q.L. (2019). Neural-network-based consensus control for multiagent systems with input constraints: The event-triggered case. IEEE Transactions on Cybernetics, 50(8): 3719-3730. https://doi.org/10.1109/TCYB.2019.2927471
[14] Ding, D., Wang, Z., Han, Q.L. (2019). A set-membership approach to event-triggered filtering for general nonlinear systems over sensor networks. IEEE Transactions on Automatic Control, 65(4): 1792-1799. https://doi.org/10.1109/TAC.2019.2934389
[15] Yuan, Y., Zhang, P., Wang, Z., Chen, Y. (2019). Noncooperative event-triggered control strategy design with round-robin protocol: Applications to load frequency control of circuit systems. IEEE Transactions on Industrial Electronics, 67(3): 2155-2166. https://doi.org/10.1109/TIE.2019.2903772
[16] Li, Q., Wang, Z., Li, N., Sheng, W. (2019). A dynamic event-triggered approach to recursive filtering for complex networks with switching topologies subject to random sensor failures. IEEE Transactions on Neural Networks and Learning Systems, 31(10): 4381-4388. https://doi.org/10.1109/TNNLS.2019.2951948
[17] Tabuada, P. (2007). Event-triggered real-time scheduling of stabilizing control tasks. IEEE Transactions on Automatic Control, 52(9): 1680-1685. https://doi.org/10.1109/TAC.2007.904277
[18] Raafat, S.M., Mahmood, A.M. (2021). Robust energy efficient control for wireless sensor networks via unity sliding mode. Journal of Engineering Science and Technology, 16(1): 65-84.
[19] He, S., Lyu, W., Liu, F. (2018). Robust H∞ sliding mode controller design of a class of time-delayed discrete conic-type nonlinear systems. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 51(2): 885-892. https://doi.org/10.1109/TSMC.2018.2884491
[20] Niu, Y., Ho, D.W. (2010). Design of sliding mode control subject to packet losses. IEEE Transactions on Automatic Control, 55(11): 2623-2628. https://doi.org/10.1109/TAC.2010.2069350
[21] Qin, J., Zhang, G., Zheng, W.X., Kang, Y. (2018). Adaptive sliding mode consensus tracking for second-order nonlinear multiagent systems with actuator faults. IEEE Transactions on Cybernetics, 49(5): 1605-1615. https://doi.org/10.1109/TCYB.2018.2805167
[22] Song, J., Wang, Z., Niu, Y. (2018). On H∞ sliding mode control under stochastic communication protocol. IEEE Transactions on Automatic Control, 64(5): 2174-2181. https://doi.org/10.1109/TAC.2018.2867340
[23] Cao, Z., Niu, Y., Song, J. (2019). Finite-time sliding-mode control of Markovian jump cyber-physical systems against randomly occurring injection attacks. IEEE Transactions on Automatic Control, 65(3): 1264-1271. https://doi.org/10.1109/TAC.2019.2926156
[24] Darwito, P.A., Wahyuadnyana, K.D. (2022). Performance examinations of quadrotor with sliding mode control-neural network on various trajectory and conditions. Mathematical Modelling of Engineering Problems, 9(3): 707-714. https://doi.org/10.18280/mmep.090317
[25] Husain, S.S., MohammadRidha, T. (2022). Design of integral sliding mode control for seismic effect regulation on buildings with unmatched disturbance. Mathematical Modelling of Engineering Problems, 9(4): 1123-1130. https://doi.org/10.18280/mmep.090431
[26] Alawad, N.A., Humaidi, A.J., Alaraji, A.S. (2022). Observer sliding mode control design for lower exoskeleton system: Rehabilitation case. Journal of Robotics and Control (JRC), 3(4): 476-482. https://doi.org/10.18196/jrc.v3i4.15239
[27] Hamzah, M.K., Rasheed, L.T. (2022). Design of optimal sliding mode controllers for electrical servo drive system under disturbance. AIP Conference Proceedings, 2415(1): 030005. https://doi.org/10.1063/5.0092311
[28] Rasheed, L.T. (2020). Performance of the adaptive sliding mode control scheme for output voltage control of the DC/DC buck converter system. IOP Conference Series: Materials Science and Engineering, 881(1): 012118. https://doi.org/10.1088/1757-899X/881/1/012118
[29] AL-Samarraie, S.A. (2018). A chattering free sliding mode observer with application to DC motor speed control. In 2018 Third Scientific Conference of Electrical Engineering (SCEE), Baghdad, Iraq, pp. 259-264. https://doi.org/10.1109/SCEE.2018.8684128
[30] Su, X., Liu, X., Shi, P., Song, Y.D. (2018). Sliding mode control of hybrid switched systems via an event-triggered mechanism. Automatica, 90: 294-303. https://doi.org/10.1016/j.automatica.2017.12.033
[31] Zheng, B.C., Yu, X., Xue, Y. (2018). Quantized feedback sliding-mode control: An event-triggered approach. Automatica, 91: 126-135. https://doi.org/10.1016/j.automatica.2018.01.007
[32] Liu, X., Su, X., Shi, P., Shen, C., Peng, Y. (2020). Event-triggered sliding mode control of nonlinear dynamic systems. Automatica, 112: 108738. https://doi.org/10.1016/j.automatica.2019.108738
[33] Su, X., Wen, Y., Shi, P., Wang, S., Assawinchaichote, W. (2019). Event-triggered fuzzy control for nonlinear systems via sliding mode approach. IEEE Transactions on Fuzzy Systems, 29(2): 336-344. https://doi.org/10.1109/TFUZZ.2019.2952798
[34] Behera, A.K., Bandyopadhyay, B. (2015). Self-triggering-based sliding-mode control for linear systems. IET Control Theory & Applications, 9(17): 2541-2547. https://doi.org/10.1049/iet-cta.2015.0342
[35] Behera, A.K., Bandyopadhyay, B., Yu, X. (2018). Periodic event-triggered sliding mode control. Automatica, 96: 61-72. https://doi.org/10.1016/j.automatica.2018.06.035
[36] Song, J., Wang, Z., Niu, Y., Dong, H. (2020). Genetic-algorithm-assisted sliding-mode control for networked state-saturated systems over hidden Markov fading channels. IEEE Transactions on Cybernetics, 51(7): 3664-3675. https://doi.org/10.1109/TCYB.2020.2980109
[37] Al-Samarraie, S.A. (2013). Invariant sets in sliding mode control theory with application to servo actuator system with friction. WSEAS Transactions on Systems and Control, 8(2): 33-45.
[38] Utkin, V. (1977). Variable structure systems with sliding modes. IEEE Transactions on Automatic Control, 22(2): 212-222. https://doi.org/10.1109/TAC.1977.1101446
[39] Behera, A.K., Bandyopadhyay, B. (2016). Event-triggered sliding mode control for a class of nonlinear systems. International Journal of Control, 89(9): 1916-1931. https://doi.org/10.1080/00207179.2016.1142617
[40] Shah, D.H., Mehta, A. (2018). Discrete-Time Sliding Mode Control for Networked Control System. Springer Singapore. https://doi.org/10.1007/978-981-10-7536-0
[41] Girard, A. (2014). Dynamic triggering mechanisms for event-triggered control. IEEE Transactions on Automatic Control, 60(7): 1992-1997. https://doi.org/10.1109/TAC.2014.2366855