Edward Hertz*![]() | Aleksander Guriev
| Aleksander Guriev![]() | Varvara Druzyanova
| Varvara Druzyanova![]() | Sergey Revyako
| Sergey Revyako![]() | Oleg Markov
| Oleg Markov![]() | Pavel Perfiliev
| Pavel Perfiliev![]() | Igor Grigorev
| Igor Grigorev![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
In forest ecosystems, the selection of appropriate machinery for logging operations is crucial for soil conservation. This study aimed to evaluate the ecological impact of various forestry machines, including wheeled, semi-tracked, and fully tracked types, on key soil parameters. Field experiments were conducted in forested stands, wherein the influence of these machines on soil porosity, compaction, and slope stability was systematically assessed. It was found that wheeled machines, characterized by multiple tires, adversely affect soil structure, leading to increased compaction and reduced porosity. Conversely, machinery with full tracks exhibited significantly lesser impact on soil integrity, suggesting their role in minimizing soil disturbance. Semi-tracked machines, integrating both wheels and tracks, presented an intermediate effect on the soil properties. Parameters such as slope angle, soil porosity, and particle density were meticulously measured and analyzed, providing insights into the varying degrees of soil disturbance caused by each machinery type. The findings underscore the necessity of employing tracked machines to preserve physicochemical soil properties in forest ecosystems. This research contributes to the understanding of the ecological consequences of machinery use in forestry, highlighting the importance of selecting machinery types that align with sustainable forest management practices. The results advocate for a paradigm shift towards machinery that mitigates soil disturbance, thereby supporting the health and sustainability of forest ecosystems. Future research should focus on developing and implementing forest management strategies that prioritize soil conservation, ensuring the long-term viability of forested landscapes.
logging, penetration resistance, semi-tracked propulsion unit, slope angle, soil compaction, soil porosity
Forestry operations, integral to the transformation of raw materials into finished products, necessitate consideration from economic, technological, environmental, institutional, and social perspectives [1]. In the contemporary economic landscape, the forestry industry plays a pivotal role in providing wood resources essential for various sectors. Critical to this industry is the selection and utilization of optimal machinery [2], with a particular emphasis on the propulsion system. The choice of propulsion system is directly linked to the efficiency and productivity of forest operations [3].
The productivity of forestry machines is influenced by numerous factors [4], with the terrain's slope being paramount. This factor significantly dictates the selection and effectiveness of machinery in forest operations. Specifically, the slope of the land is crucial in determining the speed and stability of forestry machines, particularly skidders, which are integral to logging operations [5-7].
Soil alteration during logging operations primarily manifests in three forms: compaction, rutting, and displacement due to rutting [7]. Soil compaction occurs when external mechanical forces compress soil particles, reducing pore space and increasing soil bulk density. This phenomenon is especially pronounced in moist soils, where repeated passages of machinery can lead to significant soil deformation [8].
As forestry machines traverse a stand, their interaction with the ground is primarily mediated by the propulsion system, which serves as the principal point of contact [9]. In modern logging practices, machines equipped with wheeled, tracked, and to a lesser extent, semi-tracked propulsion systems are predominantly utilized. Skidders, including tracked and half-tracked models, are especially beneficial for operations on sloped terrains, offering advantages over other machine types in such settings [10].
For operations on flat or mildly sloping terrains, wheeled machines are preferred due to their speed and high maneuverability [11]. Conversely, in challenging terrains, such as hilly areas or soft grounds, tracked vehicles demonstrate superior off-road mobility. Semi-tracked vehicles, combining the attributes of both wheeled and tracked systems, offer an advantageous balance of maneuverability and off-road capability [12].
Wheeled skidders, commonly employed in logging operations, play a vital role in the transport and movement of forest materials [13]. Their primary advantage lies in their mobility, allowing efficient movement across diverse terrains. The design of their wheels enables them to navigate obstacles such as undulations and tree roots, making them particularly suitable for varied forest environments [14]. Often, wheeled skidders are equipped with specialized attachments, including platforms or grapples, enhancing their efficiency and precision in handling logs, logging residues, and other forest products [15].
The maneuverability of wheeled skidders in confined spaces is a key factor contributing to their effectiveness. It is observed that they are capable of easily navigating between trees and through narrow passages, facilitating efficient harvesting in areas of high tree density [16]. Additionally, the high carrying capacity of wheeled skidders allows for the transportation of substantial quantities of forest material, thereby reducing the time and labor required for transportation and enhancing the productivity of logging operations [17]. Tracked and semi-tracked vehicles exhibit superior traction and maneuverability, particularly on slopes and over obstacles. This advantage is crucial when operating in steep and uneven terrains, where wheeled tractors may face challenges [18].
A notable trend in the industry is the gradual shift towards heavier and more productive machinery. The ground pressure exerted by forest machines is largely dependent on the tyre’s diameter, width, stiffness, and inflation rate for wheeled machines, and the track width for tracked machines [19, 20]. The movement of these machines can adversely affect forest ecosystems, potentially impacting long-term tree growth [19]. Research has extensively explored the effects of machinery traffic on soil properties, identifying various types of soil disturbances, including compaction, displacement, rutting, and profile disturbance [21]. Soil compaction, characterized by the destruction of soil pores and surface aggregates, is influenced by the mechanical composition of the soil, the moisture content during harvesting, and the frequency of machine passes over a particular area [22].
The impact of logging operations on soil, especially in terms of compaction, rutting, and displacement caused by rutting, is significant [23]. Compaction is characterized by the compression of soil particles due to mechanical forces, leading to a reduction in pore space and an increase in soil bulk density. This effect is more pronounced in moist soils, where repeated traversal by machinery can result in notable soil deformation. Forest machine movement has the potential to compromise essential functions of forest soils, affecting soil strength, bulk density, and macroporosity, while reducing infiltration and saturated hydraulic conductivity [24, 25]. Understanding these impacts is crucial, as it directly relates to the assessment of various types of forestry machinery and their influence on soil conditions in diverse terrains.
Research indicates that soil compaction is most significant during the initial three passes of a vehicle, with the majority of compaction occurring during these initial movements. Further passes tend to have minimal additional impact. To mitigate the extent of soil disturbance, the concentration of vehicle traffic on well-designed skid trails is advised, which helps maintain forest integrity. By this approach, soil damage can be minimized, and the preservation of the majority of trees can be ensured [26]. However, the correlation between the slope of the terrain (both longitudinal and cross slope) and the direction of machine movement (uphill or downhill) in influencing soil impact remains under-explored [27]. While certain studies did not observe a significant relationship between slope and soil bulk density post-machine movement, others reported increased soil disturbance on steeper slopes. It is hypothesized that machines may slip on steep gradients, leading to prolonged soil contact and exacerbating soil disturbance through pulling and dragging actions [26, 28].
The equipment choice in logging operations significantly influences soil disturbance. It has been observed that small-scale machines, such as agricultural tractors and small skidders, typically exert less impact on soil and vegetation due to their reduced size and weight compared to conventional skidders [29]. Recent studies on soil compaction have demonstrated that bulldozers result in the least increase in soil bulk density, while forwarders lead to the most significant increase [30]. The advantages of using agricultural tractors, particularly those with large rear tyres, include an increased tyre contact area and subsequently lower ground pressure. However, the addition of a trailer, while increasing payload per trip and reducing the number of equipment passes, also diminishes tractor maneuverability. This can lead to deep rut formation, especially on steep slopes and during uphill travel [29, 30].
Machine traffic can also obstruct soil fauna colonization, thereby disrupting soil processes. These disturbances can lead to reduced oxygen availability, increased surface water runoff, soil loss, sediment deposition, hindered root and tree growth, and ultimately, detrimental effects on site productivity [31]. The extent of soil compaction and rutting in mechanized logging is influenced by various factors, including the type and characteristics of the logging system, the number of machine passes, terrain slope, soil type, mechanical composition, moisture content, and forestry treatments [9]. It can take several years, if not decades, for forest soils to recover from the negative effects of machine movement. The restoration of compacted soil to its pre-harvest condition is a process that is both time-intensive and costly [32]. Hence, well-conceived measures and strategies are essential to mitigate the adverse effects of mechanized logging on forest soils. Effective planning and implementation can aid in controlling and minimizing soil disturbance during logging activities, thereby safeguarding the long-term health and productivity of forest ecosystems [33].
1.1 Problem statement
Analyzing the utilization of different machinery types in forestry operations is imperative for assessing their impacts on forest ecosystems under varied conditions and tasks. Such analysis enables loggers and forestry professionals to make well-informed decisions regarding the selection of optimal equipment for specific harvesting operations. A deeper understanding of the capabilities and limitations of land-based machines, particularly in challenging terrains, is crucial for foresters. This knowledge is key to enhancing logging efficiency, minimizing environmental impacts, and bolstering economic efficiency. Therefore, investigating the effects of surface equipment on soil is essential for advancing sustainable forest management practices. The primary objective of this study is to elucidate the impact of various propulsion systems on soil during forestry operations, thereby bridging the gap between machine selection and its ecological consequences.
2.1 Study location and object
The investigation was conducted in the forest plantations of the Republic of Sakha (Yakutia) during September 2022. The region experienced daily average temperatures ranging between 6-9℃ and relative humidity levels of approximately 77%. The soils of this area, characterized by an average moisture content of 30-82% and an organic matter content between 3-19%, are classified as sod-gleyed. The designated test area encompassed approximately one hectare, featuring a terrain with a maximum slope of 20%. The predominant tree species in this area is Cajander's larch (L. cajanderi), noted for its average height of 23.4 m and an average diameter at breast height of 46 cm, along with well-formed branches.
2.2 Experiment preparation
For the purpose of this study, the area was divided into distinct plots based on the varying degrees of terrain slopes. Consequently, four types of plots were established: a) slopes ranging from 0-5%, b) 5-10%, c) 10-15%, and d) 15-20%. The distance between the logging and storage sites was maintained at approximately 250 meters. Prior to the experimental commencement, only thinning operations were conducted in the area, ensuring the clearing of unnecessary vegetation from the trails before harvesting activities began. To protect the soil, shrub mats were employed. These mats consisted of freshly cut branches, averaging 2000 mm in length and 500 mm in width, and were laid out to achieve a density of 8 kg/m2.
2.3 Sampling and data processing
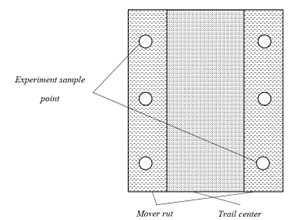
Post three passages of the machinery, soil samples were extracted from the locations where the propulsion units contacted the ground, as depicted in Figure 1. The organic layer was carefully removed using drill screws at varying depths, ranging from 50 to 200 mm in 50 mm increments. Soil samples, each 50 mm in diameter, were collected for analysis. Samples taken from the pre-logging trails served as control values for comparison.
Figure 1. Sampling design
In situ measurement of soil penetration resistance (RP) was conducted using a hand-held penetrometer [34]. The collected samples were immediately placed in plastic bags and transported to the laboratory. Upon arrival, they were weighed and subjected to a drying process for 24 hours at 105℃. The particle density (DP) of the soil samples was determined using the following formula [35]:
$D_P=\frac{D_W \cdot W_S}{W_S-W_{S W P}-W_{W P}}$ (1)
where, DW represents the water density (g/dm3), WS is the dry weight of the soil sample (g), WSWP is the weight of the pycnometer with soil and water (g), and WWP is the weight of the pycnometer with water (g). Furthermore, the bulk density of the soil (DS) was measured and calculated as per the formula [36]:
$D_S=\frac{W_S}{V_S}$ (2)
where, VS denotes the soil volume (g/dm3).
The derived values were subsequently utilized to calculate soil porosity, following the methodology outlined in reference [37].
$P_S=\frac{\left(D_P-D_S\right)}{D_P} \cdot 100 \%$ (3)
2.4 Machine parameters
Details regarding the machines utilized in the experiments are presented in Table 1.
Table 1. Technical specifications of the machines
|
Brand |
PONSSE K100 |
MTZ-82 |
TT-4M 01 |
|
Type |
Wheeled |
Semi-tracked |
Tracked |
|
Weight (kg) |
18600 |
3270 |
12600 |
|
Motor power (kW) |
210 |
59 |
98 |
|
Maximum speed (km/h) |
20 |
35 |
20 |
|
Dimensions (mm): - length - width - height |
9610 3085 3860 |
3930 1970 1665 |
5927 2700 2957 |
2.5 Statistical data analysis
For the purpose of this study, three sites were sampled and each site was analyzed individually. The statistical analysis was conducted using a one-way Analysis of Variance (ANOVA) test, with a significance level set at α=0.05. The software Excel (2013) was employed for the generation of graphical data representations.
Prior to the commencement of the experiment, RP values were observed to range between 1.319 and 1.474 MPa. As depicted in Figure 2, a notable increase in RP values, ranging from 42 to 140 kPa (or an augmentation of 3.2 to 10.5%), was recorded, contingent upon the sampling depth and the increasing gradient of the terrain slope. It was discerned that with the escalation of relief slope, RP values augmented by 23-263 kPa for wheeled vehicles, 51-259 kPa for semi-tracked vehicles, and 3-172 kPa for tracked vehicles. The highest recorded RP value was 1.637 MPa at a depth of 150-200 mm following the passage of a wheeled vehicle.
Figure 2. Soil penetration resistance
A general trend of increasing Rp with the depth of measurement was observed, alongside discernible differences between machine types on sites with a 0-5% slope. For instance, tracked machines exhibited a lower impact on penetration resistance (1.417-1.427 MPa) compared to wheeled (1.439-1.485 MPa) and semi-tracked (1.432-1.465 MPa) machines across all measured depths of 50-200 mm. On sites with a slope of 5-10%, an increase in Rp was noted with increasing measurement depth.
Here, tracked machines demonstrated lower penetration resistance (1.436-1.471 MPa) in contrast to wheeled (1.480-1.529 MPa) and semi-tracked (1.465-1.474 MPa) machines. Similar trends were observed on sites with 10-15% and 15-20% slopes, where an elevation in measurement depth corresponded with increased penetration resistance. Tracked machines on these sites also showed lower penetration resistance (1.440-1.531 MPa on sites with a 10-15% slope and 1.520-1.637 MPa on sites with a 15-20% slope) compared to wheeled machines (1.498-1.541 MPa and 1.647-1.725 MPa respectively) and semi-tracked machines (1.522-1.598 MPa and 1.578-1.679 MPa respectively).
Further analysis of the soil bulk density values at sites with varying slopes and sampling depths, as shown in Figure 3, revealed the following observations. On a site with a 0-5% slope angle, volumetric density at a sampling depth of 50-100 mm ranged from 1.03 to 1.08 g/cm³. An increase in bulk density was noted at a depth of 100-150 mm, varying between 1.05 and 1.19 g/cm³, and continued to escalate, ranging from 1.12 to 1.26 g/cm³ at a depth of 150-200 mm. Notably, the passage of tracked machines often resulted in lower soil bulk density values in comparison to wheeled and semi-tracked machines.
Figure 3. Volumetric density
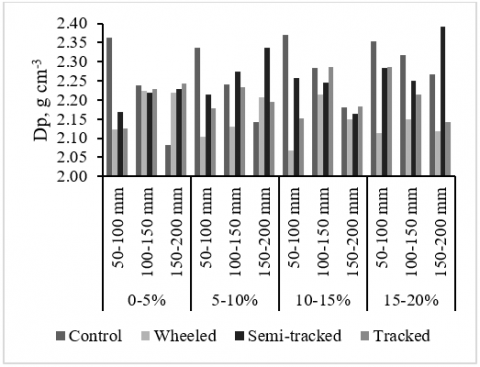
Figure 4. Particle density
At a site with a 5-10% slope, a similar pattern of increasing soil bulk density with depth was observed. Irrespective of the sampling depth, the use of wheeled machines was correlated with higher soil bulk density values compared to the use of semi-tracked and tracked machines. Sites with slopes of 10-15% and 15-20% also exhibited an increase in soil bulk density with increasing depth.
Tracked machines, on most slope sites and sampling depths, yielded the lowest soil bulk density values when compared to wheeled and semi-tracked machines. Specifically, the soil bulk density values for tracked machines were lower compared to wheeled (1.09-1.28 g/cm³, 1.08-1.32 g/cm³, and 1.09-1.26 g/cm³, respectively) and semi-tracked (1.08-1.24 g/cm³, 1.07-1.22 g/cm³, and 1.07-1.21 g/cm³, respectively) machines.
Particle density measurements revealed values ranging from 2.08 to 2.36 g/cm³ at 50-100 mm sampling depths on a site with a 0-5% slope. At sampling depths of 100-150 mm and 150-200 mm, particle density values varied, though the overall trend was mixed. Following the passage of the machines, a slight increase in soil particle density values was observed at a site with a 5-10% slope, particularly at depths of 150-200 mm.
The analysis of soil particle density values, in relation to machine types across various slopes, did not yield significant differences. Nonetheless, the influence of machine passage on soil particle density was more pronounced on sites with slopes ranging from 10-15% to 15-20%. It was noted that particle density values were generally higher following the passage of tracked machines, particularly at depths of 150-200 mm.
Figure 4 presents the particle density values obtained from the control site, which ranged from 2.08 to 2.36 g/cm³. At sampling depths of 100-150 mm and 150-200 mm, particle density values exhibited variability, with an overall mixed trend. After machine passage on a site with a 5-10% slope, a slight increase in soil particle density values was observed, especially at depths of 150-200 mm. However, the variations between different types of machines were not statistically significant. The effect of machine passage was more distinct on sites with slopes of 10-15% and 15-20%, where particle density values were generally higher following the passage of tracked machines, especially at depths of 150-200 mm.
On sites with a 0-5% slope, all types of machines resulted in elevated soil particle density values, which ranged from 2.12 to 2.39 g/cm³ at sampling depths of 50-100 mm. At depths of 100-150 mm, particle density values ranged from 2.13 to 2.29 g/cm³, following a similar trend. For depths of 150-200 mm, particle density values ranged from 2.12 to 2.39 g/cm³. On sites with a 5-10% slope, an increase in soil particle density was observed for all types of machines, with values ranging from 2.10 to 2.21 g/cm³ at depths of 50-100 mm.
Particle density values ranged from 2.13 to 2.27 g/cm³ at depths of 100-150 mm, indicating an increase in density. At depths of 150-200 mm, particle density values ranged from 2.14 to 2.34 g/cm³. A similar increasing trend was also observed for slopes of 10-15% and 15-20%. Across all types of machines, particle density increased at sampling depths of 50-100 mm, with values ranging from 2.07 to 2.26 g/cm³.
The analysis of soil porosity, influenced by the type of machines used, is presented in Table 2.
Table 2. Impact of machine types on soil porosity
|
Slope |
Sampling Depth |
Porosity (%) |
|||
|
Control |
Wheeled |
Semi-Tracked |
Tracked |
||
|
0-5% |
50-100 mm |
56.4 |
49.1 |
50.1 |
51.6 |
|
100-150 mm |
53.1 |
46.5 |
48.4 |
49.5 |
|
|
150-200 mm |
46.2 |
43.2 |
45.6 |
47.5 |
|
|
5-10% |
50-100 mm |
55.9 |
48.2 |
50.4 |
51.2 |
|
100-150 mm |
52.7 |
45.1 |
48.5 |
50.3 |
|
|
150-200 mm |
48.2 |
42 |
43.5 |
48.2 |
|
|
10-15% |
50-100 mm |
56.1 |
47.8 |
50.3 |
52.6 |
|
100-150 mm |
52.7 |
45.8 |
49.7 |
50.1 |
|
|
150-200 mm |
46.8 |
38.6 |
42.3 |
43.6 |
|
|
15-20% |
50-100 mm |
55.8 |
48.4 |
53.2 |
53.6 |
|
100-150 mm |
53.4 |
45.1 |
48.5 |
50.2 |
|
|
150-200 mm |
47.5 |
40.5 |
43.5 |
49.8 |
|
Particle density values were observed to vary within specific ranges at different sampling depths. At depths of 100-150 mm, particle density values were recorded between 2.15 and 2.29 g/cm³, indicative of elevated density levels. Similarly, at greater depths of 150-200 mm, an increase in particle density was noted, with values ranging from 2.15 to 2.39 g/cm³. These findings suggest a trend of increasing particle density with deeper soil layers.
At a slope of 0-5% and a sampling depth of 50-100 mm, soil porosity on the control plot was measured at 56.4%. Following the passage of wheeled, semi-tracked, and tracked machines, there was a decrease in porosity values to 49.1%, 50.1%, and 51.6%, respectively. At a depth of 100-150 mm under similar slope conditions, the control plot exhibited a porosity of 53.1%, which subsequently reduced to 46.5%, 48.4%, and 49.5% for wheeled, semi-tracked, and tracked machines, respectively.
In observing soil porosity at a depth of 150-200 mm under a slope of 0-5%, a reduction in porosity was evident post-machine passage. The control soil porosity was measured at 46.2%; however, the values decreased to 43.2%, 45.6%, and 47.5% following the passage of wheeled, semi-tracked, and tracked machines, respectively. This trend of decreasing soil porosity was consistent across different terrain slopes and sampling depths. Compared to the control, all machine types caused a reduction in soil porosity, with wheeled and semi-tracked machines having a less pronounced impact than tracked machines, which resulted in the lowest porosity values.
The current study extensively examined the effects of terrain slope, sampling depth, and machine type on various soil properties. It was observed that soil penetration resistance (RP) increased with steeper slopes. Wheeled machines had the most significant impact on RP, followed by semi-tracked, and then tracked machines. Bulk density was influenced by both sampling depth and slope, with wheeled machines consistently showing higher values compared to semi-tracked and tracked machines, the latter demonstrating the lowest bulk density values. Particle density displayed some variations but was generally found to be higher following the passage of tracked machinery, especially at greater depths. Soil porosity decreased with the passage of all types of machines, with wheeled machines impacting more significantly. These findings emphasize the importance of terrain and machine type considerations in managing soil properties, particularly highlighting the profound impact of wheeled machines.
The results suggest that tracked machines exhibit lower soil penetration resistance compared to wheeled and semi-tracked machines, regardless of the terrain’s slope and depth. This could be attributed to the more uniform distribution of load during traversal by tracked machines. Across all slope sites and machine types, there is a tendency for soil properties such as penetration resistance, bulk density, and particle density to increase with greater sampling depth. This increase is likely due to deeper soil layers being subjected to more substantial loads from the machines, leading to compaction and increased density [38].
Soil particle density is recognized as a critical indicator of soil quality. Elevated particle density often suggests increased soil compactness, which can restrict the penetration of water, air, and plant roots, thereby impacting soil health [39]. Particle density measurements are instrumental in evaluating soil's capacity for air and water permeability, as well as the potential for root system development [40]. These characteristics are also indicative of soil stability; higher density can lead to soil erosion, fertility loss, and diminished resistance to external factors such as wind and water erosion [41]. Thus, assessing particle density is pivotal in determining soil condition, its long-term viability, and guiding conservation and restoration efforts [42].
In terms of operational efficiency on challenging terrains and soft grounds, semi-tracked vehicles exhibit enhanced performance. Their design mitigates soil damage and compaction, a crucial aspect when operating in wet or unstable soils. The weight and pressure distribution of semi-tracked machines across the soil surface is more uniform compared to wheeled machines, which tend to exert more concentrated point loads [18]. Additionally, semi-tracked machines offer improved maneuverability over fully tracked machines [43].
A comparative analysis conducted by Marra et al. [44] examined the impact of different haulage types on slopes of 25%. Their findings revealed that soil volumetric density at the contact points of wheeled machines increased by 40%, contrasting with the maximum increase of 15.3% observed in this study, which occurred on a slope of 5-10% at a depth of 150-200 mm.
The type of machine utilized in forestry operations has been identified as a significant determinant of soil particle density. On slopes of 0-5% and 5-10%, it was observed that wheeled machines induced the highest particle density, while semi-tracked and tracked machines yielded comparable results. For slopes between 10-15% and 15-20%, tracked machines demonstrated superior performance in minimizing particle density, with semi-tracked machines performing similarly to tracked machines.
Furthermore, the slope angle was found to influence particle density. An inverse relationship between particle density and sampling depth was noted on slopes of 0-5% and 5-10% across all machine types. However, the variation in particle density was more pronounced on slopes of 10-15% and 15-20%, and was dependent on both the machine type and the depth of sampling. Wheeled machines exerted the most substantial impact on soil penetration resistance (RP), with an increase in RP values ranging from 23-263 kPa compared to control measurements. This highlights the necessity of machine type consideration in operations conducted on varied terrain slopes. The influence of terrain slope and sampling depth on soil density was also observed. Wheeled machines typically resulted in increased soil bulk density compared to semi-tracked and tracked machines. For example, on a 0-5% slope, wheeled machines increased bulk density by 3.3-5.4% relative to the control plot. These findings underscore the significant impact of machine type on soil density, reinforcing the need for careful selection of machinery based on terrain characteristics in forestry operations.
To mitigate the influence of machine types on soil particle density, the implementation of specific strategies is advocated:
Future research in this field should extend to examine the impact of additional variables, such as soil moisture, soil composition, and machine speed, on soil particle density. This approach will facilitate a more holistic understanding of the complexities involved and aid in formulating more precise guidelines for machinery use in varied soil conditions.
Additionally, research focusing on the development of innovative machinery designed to minimize their impact on soil particle density will be of substantial value. Such advancements are poised to have significant implications for practical applications in agriculture and forestry, contributing to the sustainability and preservation of soil health.
The study was carried out within the confines of the scientific school advances in lumber industry and forestry. The underlying content of this paper was funded by the Russian Science Foundation (Grant No.: 23-16-00092), (https://rscf.ru/project/23-16-00092/).
[1] Näyhä, A. (2019). Transition in the Finnish forest-based sector: Company perspectives on the bioeconomy, circular economy and sustainability. Journal of Cleaner Production, 209: 1294-1306. https://doi.org/10.1016/j.jclepro.2018.10.260
[2] Baghizadeh, K., Zimon, D., Jum'a, L. (2021). Modelling and optimisation of sustainable forest supply chain considering discount in transportation system and supplier selection under uncertainty. Forests, 12(8): 964. https://doi.org/10.3390/f12080964
[3] Matmurodov, F., Sobirov, B., Khakimov, J., Rakhmatova, F. (2023). Technical and technological ways to reduce soil compaction to preserve its fertility. In IV International Scientific Conference “Construction Mechanics, Hydraulics and Water Resources Engineering” (CONMECHYDRO - 2022). https://doi.org/10.1051/e3sconf/202336503036
[4] Jourgholami, M., Labelle, E.R., Feghhi, J. (2019). Efficacy of leaf litter mulch to mitigate run-off and sediment yield following mechanised operations in the Hyrcanian mixed forests. Journal of Soils and Sediments, 19: 2076-2088. https://doi.org/10.1007/s11368-018-2194-x
[5] Lahrsen, S., Mologni, O., Magalhães, J., Grigolato, S., Röser, D. (2022). Key factors influencing productivity of whole-tree ground-based felling equipment commonly used in the Pacific Northwest. Canadian Journal of Forest Research, 52(4): 450-462. https://doi.org/10.1139/cjfr-2021-0266
[6] Jourgholami, M., Karami, S., Tavankar, F., Lo Monaco, A., Picchio, R. (2020). Effects of slope gradient on runoff and sediment yield on machine-induced compacted soil in temperate forests. Forests, 12(1): 49. https://doi.org/10.3390/f12010049
[7] Picchio, R., Mederski, P.S., Tavankar, F. (2020). How and how much, do harvesting activities affect forest soil, regeneration and stands? Current Forestry Reports, 6(2): 115-128. https://doi.org/10.1007/s40725-020-00113-8
[8] Shah, A.N., Tanveer, M., Shahzad, B., Yang, G., Fahad, S., Ali, S., Bukhari, M.A., Tung, S.A., Hafeez, A., Souliyanonh, B. (2017). Soil compaction effects on soil health and crop productivity: An overview. Environmental Science and Pollution Research, 24: 10056-10067. https://doi.org/10.1007/s11356-017-8421-y
[9] Labelle, E.R., Hansson, L., Högbom, L., Jourgholami, M., Laschi, A. (2022). Strategies to mitigate the effects of soil physical disturbances caused by forest machinery: A comprehensive review. Current Forestry Reports, 8: 20-37. https://doi.org/10.1007/s40725-021-00155-6
[10] Dobretsov, R.Y.V., Kunitskaya, O.A., Pham, N.L. (2020). Adaptation of the principle of low-frequency pulse steering control to transmissions of forestry and transport-tractor tracked vehicles. Repair. Restoration. Modernisation, 11: 29-35. https://elibrary.ru/item.asp?id=44239653.
[11] Shuib, A.R., Radzi, M.K.F.M., Bakri, M.A.M., Khalid, M.R.M. (2020). Development of a harvesting and transportation machine for oil palm plantations. Journal of the Saudi Society of Agricultural Sciences, 19(5): 365-373. https://doi.org/10.1016/j.jssas.2020.05.001
[12] Erber, G., Spinelli, R. (2020). Timber extraction by cable yarding on flat and wet terrain: A survey of cable yarder manufacturers' experiences. Silva Fennica, 54(2): 10211. https://doi.org/10.14214/sf.10211
[13] Grigorev, I., Kunickaya, O.G., Tikhonov, E., Hertz, E., Druzyanova, V., Timokhova, O., Ivanov, V., Kruchinin, I. (2022). Dynamic impact of wheeled skidders on forest soil in felling areas. Journal of Terramechanics, 101: 1-9. https://doi.org/10.1016/j.jterra.2022.02.001
[14] Đuka, A., Poršinsky, T., Pentek, T., Pandur, Z., Vusić, D., Papa, I. (2018). Mobility range of a cable skidder for timber extraction on sloped terrain. Forests, 9(9): 526. https://doi.org/10.3390/f9090526
[15] Pedofsky, M., Visser, R. (2019). Assessment of Winch-Assist Skidder in Gisborne, New Zealand. Forest Growers Research Report H043 Forest Growers Research, Rotorua, New Zealand.
[16] Ryabukhin, P.B., Kunitskaya, O.A., Grigoreva, O.I. (2023). Justification of technological processes and systems of machines for logging operations. Izvestia Vuzov. Journal of Forestry, 2: 88-105.
[17] Shegelman, I.R., Budnik, P.V., Baklagin, V.N. (2019). Simulation modelling of truck load of skidding tractors with a grapple for chokerless skidding. Croatian Journal of Forest Engineering, 40(2): 297-310. https://doi.org/10.5552/crojfe.2019.567
[18] Burmistrova, O.N., Chemshikova, Y.M., Grigoryev, I.V., Rudov, S.E., Kunitskaya, O.A. (2020). Analysis of research on the interaction of tracked all-terrain vehicle propulsion with weakly bearing potting soil. Resources and Technology, 17(1): 29-62.
[19] Marusiak, M., Neruda, J. (2018). Dynamic soil pressures caused by travelling forest machines. Croatian Journal of Forest Engineering: Journal for Theory and Application of Forestry Engineering, 39(2): 233-245.
[20] Júnnyor, W.D.S.G., Diserens, E., De Maria, I.C., Araujo-Junior, C.F., Farhate, C.V.V., de Souza, Z.M. (2019). Prediction of soil stresses and compaction due to agricultural machines in sugarcane cultivation systems with and without crop rotation. Science of the Total Environment, 681: 424-434. https://doi.org/10.1016/j.scitotenv.2019.05.009
[21] Schönauer, M., Holzfeind, T., Hoffmann, S., Holzleitner, F., Hinte, B., Jaeger, D. (2021). Effect of a traction-assist winch on wheel slippage and machine induced disturbance in flat terrain. International Journal of Forest Engineering, 32(sup1): 1-11. https://doi.org/10.1080/14942119.2021.1832816
[22] Schreefel, L., Schulte, R.P.O., De Boer, I.J.M., Schrijver, A.P., Van Zanten, H.H.E. (2020). Regenerative agriculture–the soil is the base. Global Food Security, 26: 100404. https://doi.org/10.1016/j.gfs.2020.100404
[23] Uusitalo, J., Ala-Ilomäki, J., Lindeman, H., Toivio, J., Siren, M. (2020). Predicting rut depth induced by an 8-wheeled forwarder in fine-grained boreal forest soils. Annals of Forest Science, 77: 1-10. https://doi.org/10.1007/s13595-020-00948-y
[24] Odey, S.O. (2018). Overview of engineering problems of soil compaction and their effects on growth and yields of crops. European Journal of Advances in Engineering and Technology, 5(9): 701-709.
[25] Kalyashov, V.A., Shapiro, V.Y., Grigoriev, I.V., Kunitskaya, O.A., Grigorieva, O.I. (2021). Assessing the performance of a skidding drag on a slope of a thawing soil massif under cyclic static loads. Resources and Technology, 18(2), 79-95. https://doi.org/10.15393/j2.art.2021.5723
[26] Naghdi, R., Solgi, A., Labelle, E.R., Nikooy, M. (2020). Combined effects of soil texture and machine operating trail gradient on changes in forest soil physical properties during ground-based skidding. Pedosphere, 30(4): 508-516. https://doi.org/10.1016/s1002-0160(17)60428-4
[27] Yang, L., Yang, Y.P., Wu, G.Y., Zhao, X.M., Fang, S., Liao, X.S., Wang, R.M., Zhang, M.X. (2022). A systematic review of autonomous emergency braking system: Impact factor, technology, and performance evaluation. Journal of Advanced Transportation, 2022. https://doi.org/10.1155/2022/1188089
[28] Solgi, A., Najafi, A., Page-Dumrose, D.S., Zenner, E.K. (2020). Assessment of topsoil disturbance caused by different skidding machine types beyond the margins of the machine operating trail. Geoderma, 367: 114238. https://doi.org/10.1016/j.geoderma.2020.114238
[29] Yu, A., Gallagher, T., Mitchell, D., O'Neal, B. (2017). Application of a small-scale equipment system for biomass harvesting. Small-Scale Forestry, 16: 133-146. https://doi.org/10.1007/s11842-016-9347-9
[30] Bustos-Letelier, O., Mena, C., Santelices-Moya, R., Cabrera-Ariza, A. (2023). The influence of harvesting systems on productivity, costs, and soil compaction in small-scale forestry. Small-Scale Forestry, 22(1): 193-211. https://doi.org/10.1007/s11842-022-09522-y
[31] Tecon, R., Or, D. (2017). Biophysical processes supporting the diversity of microbial life in soil. FEMS Microbiology Reviews, 41(5): 599-623. https://doi.org/10.1093/femsre/fux039
[32] Finster, A.R. (2021). Tires, tracks, and tethering: idaho steep slope harvesting. Masters Thesis. Oregon State University.
[33] Di Sacco, A., Hardwick, K.A., Blakesley, D., Brancalion, P.H., Breman, E., Cecilio Rebola, L., Chomba, S., Dixon, K., Elliott, S., Ruyonga, G., Shaw, K., Smith, P., Smith, R.J., Antonelli, A. (2021). Ten golden rules for reforestation to optimise carbon sequestration, biodiversity recovery and livelihood benefits. Global Change Biology, 27(7): 1328-1348. https://doi.org/10.1111/gcb.15498
[34] Colombi, T., Torres, L.C., Walter, A., Keller, T. (2018). Feedbacks between soil penetration resistance, root architecture and water uptake limit water availability and crop growth-A vicious circle. Science of the Total Environment, 626: 1026-1035. https://doi.org/10.1016/j.scitotenv.2018.01.129
[35] Amoozegar, A., Heitman, J.L., Kranz, C.N. (2023). Comparison of soil particle density determined by a gas pycnometer using helium, nitrogen, and air. Soil Science Society of America Journal, 87(1): 1-12. https://doi.org/10.1002/saj2.20476
[36] Abdelbaki, A.M. (2018). Evaluation of pedotransfer functions for predicting soil bulk density for US soils. Ain Shams Engineering Journal, 9(4): 1611-1619. https://doi.org/10.1016/j.asej.2016.12.002
[37] Thombare, N., Mishra, S., Siddiqui, M.Z., Jha, U., Singh, D., Mahajan, G.R. (2018). Design and development of guar gum based novel, superabsorbent and moisture retaining hydrogels for agricultural applications. Carbohydrate Polymers, 185: 169-178. https://doi.org/10.1016/j.carbpol.2018.01.018
[38] Allman, M., Dudáková, Z., Jankovský, M., Vlčková, M., Juško, V., Tomčík, D. (2022). Soil compaction after increasing the number of wheeled tractors passes on forest soils in western Carpathians. Forests, 13(1): 109. https://doi.org/10.3390/f13010109
[39] Håkansson, I., Voorhees, W.B. (2020). Soil compaction. In Methods for Assessment of Soil Degradation. CRC Press, 167-179. https://doi.org/10.1201/9781003068716-8
[40] Zhou, C.Y., Huang, W., Qiu, S.Y., Liu, Z. (2021). A quantitative study on the amount of water-retaining agent based on adhesive-modified red bed weathered soil. Bulletin of Engineering Geology and the Environment, 80: 3139-3150. https://doi.org/10.1007/s10064-021-02113-9
[41] Gonçalves, J.L., Alvares, C.A., Rocha, J.H., Brandani, C.B., Hakamada, R. (2017). Eucalypt plantation management in regions with water stress. Southern Forests: A Journal of Forest Science, 79(3): 169-183. https://doi.org/10.2989/20702620.2016.1255415
[42] Rodrigo-Comino, J., López-Vicente, M., Kumar, V., Rodríguez-Seijo, A., Valkó, O., Rojas, C., Pourghasemi, H. R., Salvati, L., Bakr, N., Vaudour, E., Brevik, E. C., Radziemska, M., Pulido, M., Di Prima, S., Dondini, M., De Vries, W., Santos, E.S., De Lourdes Mendonça-Santos, M., Yu, Y., Panagos, P. (2020). Soil science challenges in a new era: A transdisciplinary overview of relevant topics. Air, Soil and Water Research, 13: 1178622120977491. https://doi.org/10.1177/1178622120977491
[43] Litvinova, M.M., Chernik, D.V., Goncharova, Y.S. (2022). Analytical review of the engines of modern forest machines. In Proceedings of the 7th International Conference on Industrial Engineering (ICIE 2021) Volume II 7, Sochi, Russia. Springer International Publishing, 441-447. https://doi.org/10.1007/978-3-030-85230-6_51
[44] Marra, E., Laschi, A., Fabiano, F., Foderi, C., Neri, F., Mastrolonardo, G., Nordfjell, T., Marchi, E. (2022). Impacts of wood extraction on soil: assessing rutting and soil compaction caused by skidding and forwarding by means of traditional and innovative methods. European Journal of Forest Research, 141: 71-86. https://doi.org/10.1007/s10342-021-01420-w