Sunil Pal![]() | Anuj Kumar Shukla*
| Anuj Kumar Shukla*![]() | Shubhashis Sanyal
| Shubhashis Sanyal![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The present study considers an updated solution for an improved secant method. The study presents certain changes to improve the existing method with given conditions for the roots of the non-linear equation where f(x)=0 and the function is continuous. Here an improved method has been developed that starts with the basic secant method, and after considering these conditions, an efficient solution is obtained. This modified method will increase the convergence rate faster than the standard secant method by performing a few iterations. The present solution confirmed that the proposed method is effective compared to the standard secant method. The present work developed based on additional conditions derived from the standard secant method and is responsible for reducing the number of iterations.
non-linear equation, secant method, modified secant method, numerical solution
The present work aims to find improvement in the non-linear equation solutions that require many iterations. The secant method is one of the best, considering its faster convergence rate than the Regula Falsi and Bisection method. The formulation uses three successive points of the iteration instead of just two, and the order of convergence is 1.839 [1]. An improved Newton Raphson’s method has been developed, where a definite area integral is approximated as trapezoidal area in place of the rectangular area [2]. A zero-finding method is used to solve non-linear equations, which is most efficiently used with the traditional iterative method in which the order of convergence is improved [3]. The leap-frog Newton's method has been developed using Newton's method as an intermediate step. At a simple root, the order of convergence is cubic, and the computational efficiency is lower but still quite comparable to Newton's approach [4]. To approximate a locally unique solution of a non-linear equation in Banach spaces, the idea uses Lipschitz and center–Lipschitz instead of just Lipschitz conditions in the convergence analysis [5]. An improved Regula-Falsi method with an order of convergence of 3 combines the usual Regula-Falsi method and a Newton-like method to solve for f(x) = 0 [6]. A novel approach for solving non-linear equations that is similar to the Secant method. The convergence analysis reveals that the asymptotic order of convergence of this method is $(1+\sqrt{3})$ [7]. A modified secant method is analysed under the hypothesis of second-order derivatives (Lipschitz continuous) with an error analysis [8]. An improved Regula Falsi (IRF) method based on the classic Regula-Falsi (RF) method has been tested considering many numerical examples and the results confirm that the proposed method performs well compared to the traditional Regula-Falsi method [9]. Another novel class of spectral conjugate gradient algorithms studied to achieve high-order accuracy in predicting the second-order curvature [10]. To obtain similar convergence to Newton's approach without analyzing any derivatives, a generalization of the Secant method to semi-smooth equation is suggested [11]. The Newton-Raphson method makes it clear that the correction needed to obtain the right value of the root decreases as the derivative f’(x) increases [12]. To increase the Secant method's applicability, changes have been made to the resolution of a linear system in each step required to use the secant approach for multiple matrix multiplications [13]. To solve a non-linear equation, modification has been done using the secant method, which involves the development of the inverse of the first-order divided differences of a function of several variables at two points [14]. Although the Newton-Raphson method converges quickly close to the root, its global characteristics are poor [15]. Several researchers tried to reduce the number of iterations, which reduces the computational cost of the Secant method. The present paper aims to find an improved method that is faster than the standard Secant method. According to the present study, some changes to the Secant method's standard conditions are required. These conditions are as follows:
Condition 1: - Either $f\left(x_a\right) * f\left(x_b\right)$ or $f\left(x_a\right) * f\left(x_b\right)>0$
where, xa and xb are two initial guesses, and f(xa) and f(xb) are function value. It demonstrates that the signs of f(xa) and f(xb) can be opposite or identical. The Modified Secant method also satisfied the requirement mentioned above, which is true.
Condition 2: - After making two initial estimations, xa and xb, the first root value can be calculated using the standard Secant formula. If the value obtained is x1, then the equation has a root only if f(x1)=0; otherwise, f(x1)>0 or f(x1)<0. Now, the formula for the following iterations includes two values, one of which is the new iteration value, i.e., x1, and the other one is immediately before it, i.e., xb but not xa.
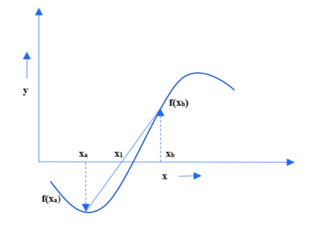
This Modified Secant approach no longer allows condition- 2. The entire fundamental is based on condition 2. The Modified Secant approach has been developed in this paper, which will also show the transformation of the standard Secant method into the Modified Secant method. The reader must have an understanding of triangular properties. Consider Figure 1, where xa and xb are the two roots. Draw a chord that joins two points, f(xa) and f(xb), due to this chord, we now have two triangles i.e., $\Delta\left(f\left(x_a\right), x_1, x_a\right)$ and $\Delta\left(f\left(x_b\right), x_1, x_b\right)$ , we can use similar triangular properties to solve the standard Secant formula. As we know, triangular properties are:
Figure 1. Function curve with two initial guesses i.e., xa and xb
Figure 1 shows the two function values, f(xa) and f(xb)are of opposing signs.
The two most recent root approximations are used to find the next approximation in the standard Secant technique [16].
As the standard Secant method uses succession roots to check the function value. The improved Secant technique used condition 2 and considers, instead of focusing on two recent values, i.e., xa and xb to calculate a new approximate value, i.e., x1. Suppose to emphasis the function value by repeatedly checking the function value after each new iteration by using Modified Secant method conditions (A and B). In that case, the number of iterations reduces significantly. The standard Secant method for the 2nd iteration after the first iteration formula is given below.
$x_2=\frac{\left(x_b * f\left(x_1\right)-x_1 * f\left(x_b\right)\right)}{f\left(x_1\right)-f\left(x_b\right)}$ (1)
The Modified Secant approach for the 2nd iteration of the formula, Conditions (A and B), is as follows:
If $a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xa with x1 for 2nd iteration(A).
If $a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xb with x1 for 2nd iteration(B).
The Modified Secant method applied immediately after the first iteration, and the starting formulation remains the same for Regula Falsi, the Secant method, and the Modified Secant method. Let two initial guesses be, $x_a$ and $x_b$(the function values of both negative, and positive, or one negative and one positive, have no effect on the initial formula) [17]. By employing a similar triangular property. The first iteration formula is as follows: Refer to Figure 1.
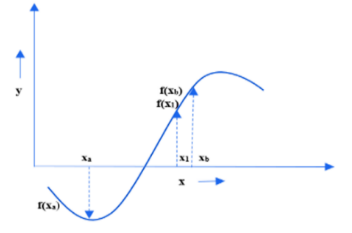
Figure 2. Function curve with three roots, i.e., xa, xb and x1 for finding x2
$\begin{gathered}\frac{\left(x_1-x_a\right)}{\left(-f\left(x_a\right)\right)}=\frac{\left(x_b-x_1\right)}{f\left(x_b\right)} \\ f\left(x_b\right) * x_1-f\left(x_b\right) * x_a=\left(-f\left(x_a\right) * x_b\right)+f\left(x_a\right) * x_1 \\ f\left(x_b\right) * x_1-f\left(x_a\right) * x_1=\left(-f\left(x_a\right) * x_b+f\left(x_b\right) * x_a\right. \\ \left(f\left(x_b\right)-f\left(x_a\right)\right) * x_1=f\left(x_b\right) * x_a-f\left(x_a\right) * x_b \\ x_1=\frac{\left(x_a * f\left(x_b\right)-x_b * f\left(x_a\right)\right)}{\left(f\left(x_b\right)-f\left(x_a\right)\right)}\end{gathered}$ (2)
For the second iteration, use the conditions (A and B): Since the modified approach will compute after the first iteration, it's critical to illustrate the second iteration formula. Refer to Figure 2.
If $a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xa with x1 for new iteration (A).
$\begin{gathered}\frac{\left(x_2-x_a\right)}{\left(-f\left(x_a\right)\right)}=\frac{\left(x_1-x_2\right)}{f\left(x_1\right)} \\ f\left(x_1\right) * x_2-f\left(x_1\right) * x_a=-f\left(x_a\right) * x_1+f\left(x_a\right) * x_1 \\ f\left(x_1\right) * x_2-f\left(x_a\right) * x_2=-x_1 * f\left(x_a\right)+f\left(x_1\right) * x_a \\ \left(f\left(x_1\right)-f\left(x_a\right)\right) * x_2=f\left(x_1\right) * x_a-x_1 * f\left(x_a\right) \\ x_2=\frac{\left(x_a * f\left(x_1\right)-x_1 * f\left(x_a\right)\right)}{\left(f\left(x_1\right)-f\left(x_a\right)\right)}\end{gathered}$ (3)
If $a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)$use xb with x1 for new iteration (B).
$\begin{gathered}\frac{\left(x_b-x_2\right)}{f\left(x_b\right)}=\frac{\left(x_1-x_2\right)}{f\left(x_1\right)} \\ x_b * f\left(x_1\right)-x_2 * f\left(x_1\right)=f\left(x_b\right) * x_1-f\left(x_b\right) * x_2 \\ x_b * f\left(x_1\right)-f\left(x_b\right) * x_1=x_2 * f\left(x_1\right)-f\left(x_b\right) * x_2 \\ x_b * f\left(x_1\right)-f\left(x_b\right) * x_1=\left(f\left(x_1\right)-f\left(x_b\right)\right) * x_2 \\ x_2=\frac{\left(x_b * f\left(x_1\right)-x_1 * f\left(x_b\right)\right)}{\left(f\left(x_1\right)-f\left(x_b\right)\right)}\end{gathered}$ (4)
The standard Secant technique requires only one formula to solve for the second iteration; however, the modified Secant method employs two conditions (A and B) on the second iteration.
3.1 Proof of the modified secant method
The Regula Falsi, Secant technique and Modified Secant method require two initial guesses to solve non-linear equations. The modified procedure starts after the first iteration since it requires three function values to meet conditions (A and B).
The Secant method has the disadvantage that it cannot approximate the root value more accurately with each iteration, which makes the function value close to zero. By presenting conditions (A and B), the problem has been eliminated. The physical relevance of these two requirements has been reduced to a bare minimum computational cost. Afterwards, one must consider the second condition (mentioned in the introduction). For the second approximation root, the Secant approach is employed xb with x1, but not xa with x1. The Secant approach does not provide any information about xa with x1. Therefore, these two conditions (A and B) are introduced to clarify this. These two conditions connect new approximate roots and older roots to meet the situation best. Consider condition (A) (mentioned in the introduction part); in this case, the left-hand side difference is less than the right-hand side difference. This distinction is significant because it reveals how these roots are best selected after each iteration. These two conditions (A and B) can be used to achieve this.
A straightforward illustration Consider the initial predictions, xa and xb. Let's use the values f(xa))= 2, f(xb)=3, and f(x1)=1.8, The modified secant technique will then satisfy conditions (A and B) by using the value of f(xa), f(xb) and f(x1) for the next iteration, i.e., x2, which will aid in finding functions near zero. The Modified Secant method stops performing once the differences between the left-hand and right-hand sides in either of the conditions (A or B) are less than the error, which depends on the type of problem setting, whether the condition is satisfied or not, and works as a stopping criterion.
Conditions (A and B) follow the Secant method requirement to show the Modified Secant Method.
If $\operatorname{abs}\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xa with x1 for 2nd iteration. (A)
If $a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_a\right)\right)-\operatorname{abs}\left(f\left(x_1\right)\right)$ use xb with x1 for 2nd iteration. (B)
xa = 1st initial guess
xb = 2nd initial guess
x1 = 1st approximate root after the first iteration using formula 2, given above.
f(xa) = Function value of 1st initial guess
f(xb)Function value of 2nd initial guess
f(x1) Function value of 1st approximate root
According to the secant or chord method: -
The Modified Secant method meets the standard Secant method's criteria and adds these two conditions (A and B). This approach is now more accurate than the previous standard Secant method, and the number of iterations has been reduced. Because there are three roots available, the information acquired from these two conditions (A and B) means that a choice can be made between the two older approximate roots and the new approximate root in order to determine the subsequent approximate root.
3.2 Procedure for the modified secant method
The following are the steps to be considered in the proposed modified Secant method.
Step 1: - Consider two initial guesses, let's say, x-1 and x0
Step 2: - Put x-1, x0, f(x-1), f(x0) in general, the formula is given below.
$x_{i+1}=\frac{\left(x_{i-1}\quad * f\left(x_i\right)-x_i * f\left(x_{i-1}\quad\right)\right)}{\left(f\left(x_i\right)-f\left(x_{i-1}\quad\right)\right.}$ (5)
For the 1st iteration, i = 0.
Step 3: - Use Conditions (A and B) for the 2nd iteration.
If $a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xa with x1 for 2nd iteration (A):
here, $x_a=x_{-1}$ and $x_b=x_0$:
$x_2=\frac{\left(x_{-1} \quad* f\left(x_1\right)-x_1 * f\left(x_{-1}\quad\right)\right)}{\left(f\left(x_1\right)-f\left(x_{-1}\quad\right)\right)}$ (6)
If $a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xb with xa for 2nd iteration (B).
$x_2=\frac{\left(x_b * f\left(x_1\right)-x_1 * f\left(x_b\right)\right)}{f\left(x_1\right)-f\left(x_b\right)}$ (7)
Step 4: - Stop executing once the left-hand and right-hand side differences in any of the conditions are less than the error. If the condition is satisfied, use conditions (A and B) as a stopping criterion.
Step 5: - Repeat step 3 for the 3rd iteration.
Either condition (A) or condition (B) is met, use the following formula pattern:
$x_{\text {next }}=\frac{\left(x_{\text {old }} \,\,* f\left(x_{\text {new }}\,\,\right)-x_{\text {new }} \,\,* f\left(x_{o l d}\,\,\right)\right)}{\left(f\left(x_{n e w}\,\,\right)-f\left(x_{o l d}\,\,\right)\right)}$ (8)
where, $x_{n e x t}=x_{i+1}, i=2$
$x_{\text {old }}=x_{i-1}, i=2$ and $i=1$
$x_{n e w}=x_i, i=2$
Two values of $x_{\text {old }}$at different (i) represent two old approximate roots as per applicability of conditions (A and B) while xnew represents a new approximate root.
For subsequent iterations i=3,4,5………. n, n = Real number.
3.3 Flow chart for steps involved in the proposed modified method
Figure 3 shows the flow chart of modified secant method.
Figure 3. Flow chart for modified secant method
Consider, f(x)=cos(x)-x*exp(x), use the Modified Secant method to solve the problem.
Step 1: Consider two initial guesses, let's say, x-1 and x0.
Let x-1=0.5, 1st initial guess
x0 = 1, 2nd initial guess
f(x-1) =0.0532
f(x0) = -2.1779
Step 2: Put x-1, x0, f(x-1), f(x0) in general the formula is given below.
$x_{i+1}=\frac{\left(x_{i-1} \,\,* f\left(x_i\right)-x_i * f\left(x_{i-1}\,\,\right)\right)}{\left(f\left(x_i\right)-f\left(x_{i-1}\,\,\right)\right.}$
For 1st iteration, i=0
$\begin{aligned} x_1 & =\frac{\left(x_{-1} * f\left(x_0\right)-x_0 * f\left(x_{-1}\right)\right)}{\left(f\left(x_0\right)-f\left(x_{0-1}\right)\right.} \\ x_1 & =0.5119 \text { and } f\left(x_1\right)=0.01773\end{aligned}$
Step 3: - Use Conditions (A and B) for the 2nd iteration.
If $a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xa with x1 for 2nd iteration (A).
Initial guess used $x_a=x_{-1}, \quad x_b=x_0$, put $f\left(x_{-1}\right)=0.0532$ and $f\left(x_0\right)=-2.1779$ in Condition-A as follows:
$0.03547<2.16017(A)($ Satisfied)
If $a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xb with x1 for 2nd iteration (B).
Put $f\left(x_{-1}\right)=0.0532$ and f(x0)= -2.1779 in condition-B as follow:
$2.16017<0.03547(B)($ Not Satisfied $)$
Apply condition-A and the formula given as follows:
$x_2=\frac{\left(x_{-1} \,\,* f\left(x_1\right)-x_1 * f\left(x_{-1}\,\,\right)\right)}{\left(f\left(x_1-f\left(x_{-1}\right)\,\,\right)\right.}$
x2=0.5178 and f(x0) = -0.000129
Step 4: - Stop executing once the left-hand and right-hand side differences in any of the conditions are less than the error. Whether the condition is satisfied or not. Use conditions (A and B) as a stopping criterion.
If $a b s\left(f\left(x_a\right)\right)-a b s\left(f\left(x_1\right)\right)<a b s\left(f\left(x_b\right)\right)-a b s\left(f\left(x_1\right)\right)$ use xa with x1 for new iteration (A).
Here $x_a=x_0$ and $x_b=x_1$ and $x_1=x_2$
2.1779-0.000129<0.01773-0.000129
2.1777<0.01760 (not satisfied but difference is negligible)
x2=0.5178 is the equation's root.
Consider, f(x)=cos(x)-x* exp(x), same problem solved by standard Secant method.
Let x-1=0.5, 1st initial guess
x0 = 1, 2nd initial guess
f(x-1) =0.0532
f(x0) = -2.1779
i = 0 for the 1st iteration, and the formula becomes as follows:
$x_1=\frac{\left(x_{-1} \,\,* f\left(x_0\right)-x_0 * f\left(x_{-1}\,\,\right)\right)}{\left(f\left(x_0\right)-f\left(x_{0-1}\,\,\right)\right.}$
x1=0.5119 and f(x1)=0.01773
i = 1 for the 2nd iteration, and the formula becomes as follows:
$x_2=\frac{\left(x_0 * f\left(x_1\right)-x_1 * f\left(x_0\right)\right)}{\left(f\left(x_1\right)-f\left(x_0\right)\right.}$
$\begin{aligned} & x_0=1, f\left(x_0\right)=-2.1779, x_1=0.5119, f\left(x_1\right) 0.1773 \\ & x_2=0.5158 \text { and } f\left(x_2\right)=0.0059\end{aligned}$
i = 2 for the 3rd iteration, and the formula becomes as follows:
$x_3=\frac{\left(x_1 * f\left(x_2\right)-x_2 * f\left(x_1\right)\right)}{\left(f\left(x_2\right)-f\left(x_1\right)\right.}$
$\begin{aligned} & x_3=0.5178 \text { and } f\left(x_3\right)=-0.000129 \\ & x_3=0.5178 \text { is the equation's root }\end{aligned}$
The number of iterations can be lowered by using the Modified Secant technique.
5.1 Comparison and validation 1
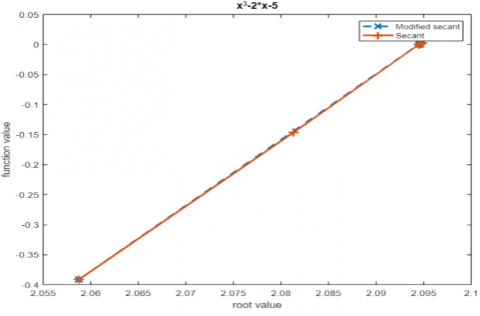
Consider f(x)= x3-2*x-5
1st initial guess = 2, 2nd initial guess = 3
Final root = 2.0946
Modified Secant Method = 4 Iteration
Secant Method = 5 Iteration
Regula Falsi Method = 10 Iteration
Bisection Method = 15 Iteration
Newton Raphson Method = 2 Iteration
Values obtained using different root finding methods are tabulated in Table 1 and 2.
Table 1. Comparison of various methods for a lower number of iterations
|
Modified Secant Method |
Secant Method |
Regula Falsi Method |
Bisection Method |
Newton Raphson Method |
|
X1=2.0588 |
X1=2.0588 |
X1=2.05882 |
X1=2.5000 |
X1=2.1000 |
|
X2=2.0966 |
X2=2.0813 |
X2=2.08126 |
X2=2.2500 |
X2=2.0946 |
|
X3=2.0945 |
X3=2.0948 |
X3=2.08964 |
X3=2.1250 |
|
|
X4=2.0946 |
X4=2.0945 |
X4=2.09274 |
X4=2.0625 |
|
|
|
X5=2.0946 |
X5=2.09388 |
X5=2.0938 |
|
|
|
|
X6=2.09431 |
X6=2.1094 |
|
|
|
|
X7=2.09466 |
X7=2.1016 |
|
|
|
|
X8=2.09452 |
X8=2.0977 |
|
|
|
|
X9=2.09454 |
X9=2.0957 |
|
|
|
|
X10=2.09455 |
X10=2.0947 |
|
|
|
|
|
X11=2.0942 |
|
|
|
|
|
X12=2.0945 |
|
|
|
|
|
X13=2.0946 |
|
|
|
|
|
X14=2.0945 |
|
|
|
|
|
X15=2.0946 |
|
(a) Function vs Root value
(b) Function vs Root value
(c) Function vs Root value
(d) Function vs Root value
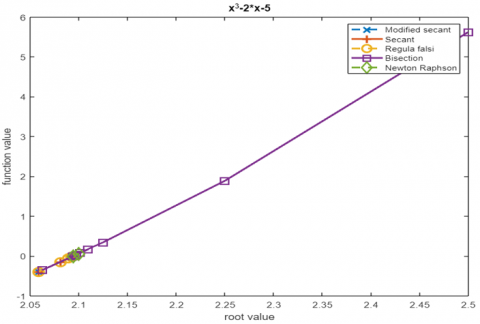
Figure 4. (a) Function vs Root value; (b) Function vs Root value; (c) Function vs Root value; (d) Function vs Root value
The figures above shows the comparison of root finding method.
Figure 4 (a) shows comparisons between the Modified Secant Method and Standard Secant, Regula Falsi, Newton Raphson and Bisection method for a lower number of iterations.
Figure 4 (b) shows comparisons between the Modified Secant method and Standard Secant, Regula Falsi and Newton Raphson method for the lower number of iterations.
Figure 4 (c) shows comparisons between the Modified Secant method and Standard Secant and Regula Falsi method for the lower number of iterations.
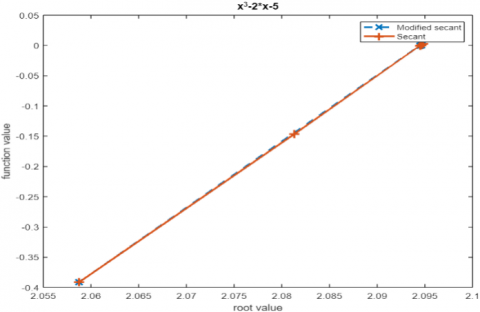
Figure 4 (d) shows comparisons between Modified Secant and Standard Secant methods for lower number of iterations.
From the present study, it is concluded that the Modified secant method has only four iterations, which can be easily found in Figures 4 (a), (b), (c) and (d) when compared with standard secant, Regula Falsi, and the Bisection method. In Figure 4 (a), compared to Newton Raphson's method, the Modified Secant method requires fewer iterations, but not as much.
5.2 Comparison and validation 2
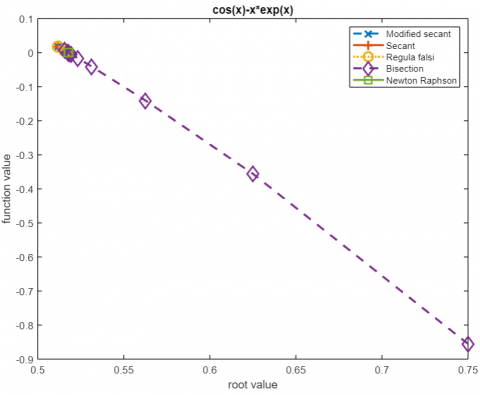
Consider f(x)= cos(x)-x*exp(x)
1st initial guess = 0.5, 2nd initial guess = 1
Final root = 0.5178
Modified Secant method = 2 Iteration
Secant method = 3 Iteration
Regula Falsi method = 8 Iteration
Bisection method = 13 Iteration
Newton Raphson method = 2 Iteration
Table 2. Comparison of various methods for a lower number of iterations
|
Modified Secant Method |
Secant Method |
Regula Falsi Method |
Bisection Method |
Newton Raphson Method |
|
X1=0.5119 |
X1=0.5119 |
X1=0.51193 |
X1=0.7500 |
X1=0.5180 |
|
X2=0.5178 |
X2=0.5159 |
X2=0.51585 |
X2=0.6250 |
X2=0.5178 |
|
|
X3=0.5178 |
X3=0.51713 |
X3=0.5652 |
|
|
|
|
X4=0.51755 |
X4=0.5312 |
|
|
|
|
X5=0.51769 |
X5=0.5156 |
|
|
|
|
X6=0.51774 |
X6=0.5234 |
|
|
|
|
X7=0.51775 |
X7=0.5195 |
|
|
|
|
X8=0.51776 |
X8=0.5176 |
|
|
|
|
|
X9=0.5186 |
|
|
|
|
|
X10=0.5181 |
|
|
|
|
|
X11=0.5178 |
|
|
|
|
|
X12=0.5177 |
|
|
|
|
|
X13=0.5178 |
|
The figures below shows the comparison of root finding method.
Figure 4 (e) shows the function value against the root value for the Modified Secant Method, Standard Secant, Regula Falsi, Newton Raphson and Bisection method for the lower number of iterations.
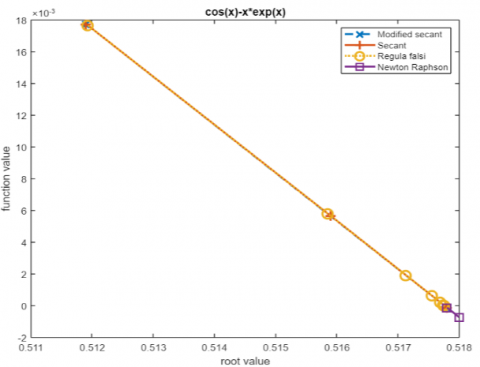
Figure 4 (f) shows function value against root value for Modified Secant method, Standard Secant, Regula Falsi and Newton Raphson method for a lower number of iterations
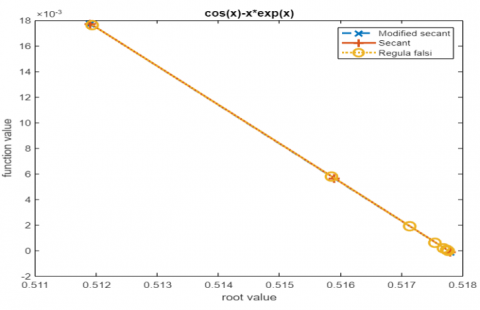
Figure 4 (g) shows function value against root value for Modified Secant method with Standard Secant and Regula Falsi, the method for a lower number of iterations.
Figure 4 (h) shows function value against root value for the Modified Secant method and Standard Secant method for a lower number of iterations.
It can be seen from Figures below that the modified secant method has two iterations, whereas the standard secant method has three iterations. The same can be seen in Figures 4 (e), 4 (f) and 4 (g). The present study concludes that modified secant method conditions (A and B) work on finding those roots which give solution faster than the standard Secant method.
(e) Function vs Root value
(f) Function vs Root value
(g) Function vs Root value
(h) Function vs Root value
Figure 4. (e) Function vs Root value; (f) Function vs Root value; (g) Function vs Root value; (h) Function vs Root value
The present work shows the Modified Secant approach to locate roots with fewer iterations than the Secant method. This approach can be used to solve any non-linear equation comprising algebraic, transcendental, or other functions. Compared to the Secant, Regula Falsi, and Bisection methods, the approximate root is computed in fewer iterations. For the Modified Secant method, conditions A and B are crucial. The current work identifies these two conditions (A and B). It shows that they satisfied the Secant assertion and clarified using three roots after the first iteration to choose two roots for the second iteration and subsequent iterations. It is also concluded that the Modified Secant method required less computational cost when compared with Bisection, Regula Falsi and the standard Secant method but not with the Newton-Raphson method.
[1] Tiruneh, A.T. (2019). A modified three-point Secant method with improved rate and characteristics of Convergence. https://doi.org/10.48550/arXiv.1902.09058
[2] Weerakoon, S., Fernando, T.G.I. (2000). A variant of Newton’s method with accelerated third-order convergence. Applied Mathematics Letters, 13(8): 87-93. https://doi.org/10.1016/S0893-9659(00)00100-2
[3] Grau-Sánchez, M., Díaz-Barrero, J.L. (2011). A technique to composite a modified Newton’s method for solving nonlinear equations. http://arxiv.org/abs/1106.0996
[4] Kasturiarachi, A.B. (2002). Leap-frogging Newton’s method. International Journal of Mathematical Education in Science and Technology, 33(4): 521-527. https://doi.org/10.1080/00207390210131786
[5] Magreñán, A., Argyros, I.K. (2016). New improved convergence analysis for the secant method. Mathematics and Computers in Simulation, 119: 161-170. https://doi.org/10.1016/j.matcom.2015.08.002
[6] Parida, P.K., Gupta, D.K. (2006). An improved Regula-Falsi method for enclosing simple zeros of nonlinear equations. Applied Mathematics and Computation, 177(2): 769-776. https://doi.org/10.1016/j.amc.2005.11.034
[7] Wang, X., Kou, J., Gu, C. (2010). A new modified secant-like method for solving nonlinear equations. Computers and Mathematics with Applications, 60(6): 1633-1638. https://doi.org/10.1016/j.camwa.2010.06.045
[8] Wu, Q., Ren, H. (2006). Convergence ball of a modified secant method for finding zero of derivatives. Applied Mathematics and Computation, 174(1): 24-33. https://doi.org/10.1016/j.amc.2005.05.007
[9] Naghipoor, J., Ahmadian, S.A., Soheili, A.R. (2008). An improved Regula Falsi method for finding simple zeros of nonlinear equations. Applied Mathematical Sciences 2(8): 381-386. https://profdoc.um.ac.ir/articles/a/1016057.pdf
[10] Livieris, I.E., Pintelas, P. (2013). A new class of spectral conjugate gradient methods based on a modified secant equation for unconstrained optimization. Journal of Computational and Applied Mathematics, 239(1): 396-405. https://doi.org/10.1016/j.cam.2012.09.007
[11] Amat, S., Busquier, S. (2003). A modified secant method for semismooth equations. Applied Mathematics Letters, 16(6): 877-881. https://doi.org/10.1016/S0893-9659(03)90011-5
[12] Longley, W.R. (1932). JB Scarborough, Numerical Mathematical Analysis. https://projecteuclid.org/journals/bulletin-of-the-american-mathematical-society/volume-38/issue-5/Review-J-B-Scarborough-Numerical-Mathematical-Analysis/bams/1183495919.pdf, accessed on Jul. 20, 2022.
[13] Amat, S., Hernández-Verón, M.A., Rubio, M.J. (2014). Improving the applicability of the secant method to solve nonlinear systems of equations. Applied Mathematics and Computation, 247: 741-752. https://doi.org/10.1016/j.amc.2014.09.066
[14] Ezquerro, J.A., Grau, A., Grau-Sánchez, M., Hernández, M.A., Noguera, M. (2012). Analysing the efficiency of some modifications of the secant method. Computers and Mathematics with Applications, 64(6): 2066-2073. https://doi.org/10.1016/j.camwa.2012.03.105
[15] Kiusalaas, J. (2015). Numerical Methods in Engineering with MATLAB®. https://doi.org/10.1017/CBO9781316341599
[16] Grewal, B.S. (2019). Numerical Methods in Engineering and Science.
[17] Chapra, S.C., Canale, R.P. (2010). Numerical methods for engineers. McGraw-Hill, USA.