Bashra Kadhim Oleiwi*![]() | Layla H. Abood
| Layla H. Abood![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Electric vehicle (EV) technology is developing and requires effective and adaptive controllers to enhance performance and be the best sustainable solution to the population concerns caused by oil from other vehicles. This paper proposes a nonlinear Proportional Derivative (PD) controller to control motor speed in EV. The controller's optimal gains are tuned using Gorilla Troops Optimization (GTO). Two classical controllers (PID, PD) are compared with nonlinear PD controller, all tuned controller variables are determined using the GTO algorithm, and the Integral Time Absolute Error (ITAE) fitness function is adopted to maintain the system performance. To simulate the system response, MATLAB (Platforms for m-file and Simulink) is used. The achieved results are compared with the classical controllers (PD &PID) to demonstrate the efficacy of the suggested nonlinear PD controller. The benefits of using the nonlinear hyperbolic function effect on system behavior can be seen in its quick settling time, which is 9.6% faster than the traditional PID controller and 47% faster than the traditional PD controller. It also became apparent in its stable response, which was free of noise and overshoot while the PID controller overshoots with a value of (8.8). While in rise time, the proposed controller with 0.0083s outperforms the PID controller 0.4905s, and the PD controller 0.1315s. According to the simulation results, the nonlinear PD controller settling time is faster and more smoothly (0.0187s) than the PID (0.18s) and PD (0.88s) controllers, which are also optimized with the same GTO tuning algorithm. The suggested controller and the intelligent tuning algorithm guided the system's response to produce the best outputs. The simulation results demonstrated a steady behavior and an effective response in tracking the intended speed value; transient analysis is utilized to explain the performance of the suggested controller.
electric vehicle, motor speed, nonlinear PD, gorilla troops optimization
Nowadays, many countries try to promote the Electrical Vehicles (EV) use to fix the pollution issues and to reduce the fuel energy dependence due to its high prices and low batteries lifetime. The controlling of speed in EV required a controller that provides a maximum speed with a small values of error tracking and consumption of the power. The EV system is suffered from high nonlinearity and uncertain for the change of road states, system parameters, and finally external disturbances [1, 2].
In the electric vehicle system, the first trail for authors is to solve speed control matter; it is adopted as a subject for vast number of studies [3, 4] for the DC motor of an EV, a PID controller is suggested. In other systems [5], an electronic throttle valve's angular position is controlled by an Adaptive Neural Network-based Fuzzy Inference (ANFIS) controller. A modified harmony search optimization method is utilized [6] to ensure that the most effective tuning of the most well-liked existing PI has a positive impact on the speed management of EVs to introduce an intelligent type-2 fuzzy logic controller, in the study [7], a fractional order PID controller is presented for speed tracking performance. Using Gray Wolves Optimization (GWO) to optimize the controller's settings, an EV speed controller using a fuzzy-PID algorithm is developed [8], and finally a robust H∞ is suggested for improve the system stability [9]. These types have recently been used by many researchers with a variety of changes, such as the combination of an intelligent approach like a neural network [10, 11], or alter its arrangement to change the desired response of the system [12, 13], or used the fractional calculus such as fractional differential or fractional integral, or the two together become as a fractional to improve system response [14], the parameters are (λ for the integral and μ for derivative ), due to this the controller gains will be five tuned values. Fractional order fuzzy PID controller used in the study [15], a hybrid algorithm using the Flower Pollination Algorithm (FPA) and Genetic Algorithm (GA) introduced in the study [16], and Ant Colony Optimization (ACO) and Genetic Algorithm (GA)-based fuzzy PID controller presented in the studies [17-19]. Makrygiorgou and Alexandridis [20] focused on a cascaded PI/P scheme and a PI controller to regulate the EV's speed and DC voltage/battery, respectively. Jassim et al. [21] presented the use of particle swarm, multiverse optimization algorithms, and PID controllers to develop the optimal controller for electric vehicles. Nitesh and Ravichandra [22] introduced a fuzzy Type-2 controller for controlling single-wheel EVs.
Based on lead compensation, a sophisticated control algorithm is suggested [23] to regulate the electric vehicle system's speed. The compensator parameters are then optimally defined using the Zebra Optimization Algorithm (ZOA) so that the system outputs and reference model are asymptotically identical with a desired steady-state error. Alkreem and Abbas [24] suggested using Model Predictive Control (MPC) to address the problems with the EV system. Additionally, two optimization algorithms-improved chaotic electromagnetic field optimization and electrically charged particle optimization-are used for optimizing the MPC's performance. Numerous recent publications highlighted the contributions and efforts of other researchers in this area. Based on a neural network (NN) and driver behavior data, a dual-mode adaptive cruise control (ACC) strategy that combines MPC and NN was proposed [25] to create an intelligent ACC system. A novel approach to energy management has been put forth, which entailed employing a Markov chain and real-time data to model the driver's behavior, which was then applied to a stochastic MPC algorithm [26]. A novel form of adaptive cruise control (ACC) algorithm was introduced, integrating active disturbance rejection control (ADRC) and MPC. The MPC is used by the ACC system's upper controller [27].
This study presents an effective nonlinear PD (NLPD) controller scheme with the advantage of utilizing an intelligent optimization technique for adjusting the gains or parameters of the controller required to improve the EV dynamic response by accurately tracking the driver-selected desired speed.
The following is a list of this paper: The mathematical modeling of the EV system is illustrated in Section 2. The suggested controller for speed control is described in Section 3. In Section 4, the GTO algorithm is illustrated. Section 5 presents the numerical results, while Section 6 presents this article's conclusions.
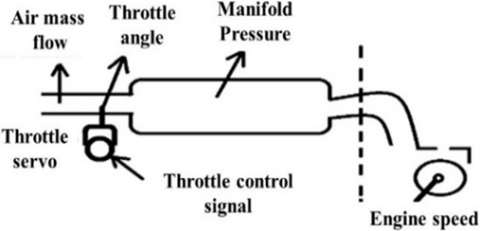
Figure 1 depicts the electronic throttle control system for electric vehicles employing a DC servo motor and the configuration of leader-follower are used for the dynamics of the vehicle as explained in the Simulink circuit shown in Figure 2 [28].
Figure 1. Electronic throttle control schematic [10]
Figure 2. Vehicle Simulink model [8]
The vehicle dynamics are represented by equations below:
m¨x=fe(θ)−a˙x2−fg (1)
˙fe(θ)=1τf(−fe(θ)+fi+γ√θ) (2)
where, fe is engine force, which depends on the throttle position, fg represents gravity-induced force, which depends on the grade of the road, θ is position of the throttle, ˙x presents speed of the vehicle. The basic assumptions are listed below:
The values for the parameters are indicated in Table 1.
Table 1. EV parameter values [8]
|
Variable |
Notation |
Value |
|
Vehicle Mass |
M |
1000Kg |
|
Coefficient of Aerodynamic Drag |
α |
4N(m/s)2 |
|
Coefficient of Engine Force |
γ |
12500N |
|
Engine idle Force |
fi |
6400N |
The transfer function based on explained system dynamics is
V(s)θ(s)=829000s(s+5) (3)
State space system equations
A=[010−5],B=[0829000],C=[10],D=[0]
The System is |λI-A|=0, then λ1=0 & λ2=-5. System is observable and controllable with matrix Q &R with rank equal 1.
Q=829000×[010−5]&R=[1001]
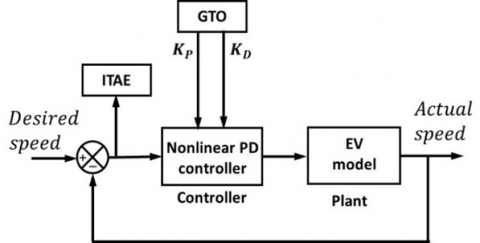
PID controllers are considered as widely applicable and conventional controller types that are utilized to improve the desired system responsiveness. In this paper a nonlinear relation is introduced to enhance system behavior and make the system stable [29, 30]. In order to manage the motor speed in an EV, a nonlinear PD controller's optimal gains are tuned using GTO algorithm. Following that, two classical controllers (PID and PD) will be used for comparison purposes, the GTO method is used to find all tuned controller variables, and the fitness function ITAE will be applied to maintain system performance. As can be noticed in Figure 3, it is a multiplication of a nonlinear variable (e) and the PD controller variables, this nonlinear formula is a function of system error as explained in Eq. (4).
Figure 3. Nonlinear PD controller
Kn(e)=Tanh(e)=exp(k0e)−exp(k0e)exp(k0e)+exp(k0e) (4)
e={e|e|≤emax (5)
k p, k d and k_0 are three gains are tuned to its optimal values for reaching to the optimal system response.
Due to the fact that natural organisms have a collective intelligence that has been researched and modelled by intelligent algorithms, optimization algorithms have become an efficient technique to solve many challenges. The artificial GTO algorithm is one of these formulas [31-33]:
Stage 1: Exploration
Each gorilla is now taken into consideration as a potential opponent for the best decision made by the silverback. In this stage, there are three options that are expressed in Eq. (6) below. The first option is to move to an unknown location and increase the exploration of GTO, the second is to move to a different group and balance the two stages of exploration and exploitation, and the third is to move to a predetermined location and increase GTO capability in order to explore various locations.
G X(t+1)=\left\{\begin{array}{lc}(U L-L L) r_1+L L, & \text { if rand }<P \\ \left(r_2-a\right) X_r(t)+L \times H, & \text { if rand } \geq 0.5 \\ X(i)-L\left(L\left(X(t)-G X_r(t)\right)+r_3\left(X G X_r(t)\right)\right) & \text { if rand }<0.5\end{array}\right. (6)
The current position is the vector (t), and the nominated location for the following iteration is G X(t+1). Any group candidate who is randomly selected from the group is represented by the variable X_r(t), and G X_r(t) is the location of this random one. The variables' upper and lower limits are U L and L L, and the random integers between 0 and 1 are used as the parameters r_1, r_2, l, Z and r_3. The variables, a, L and H is claculated as follows:
a=C \times(1-I t / MaxIt ) (7)
C=\cos \left(2 \times r_4\right)+1 (8)
L=c \times l (9)
H=Z \times X(t) (10)
Z=[-a, a] (11)
Stage 2: Exploitation
There are two choices available at this stage: the first is to follow the adult leader Silverback, and the second is to engage in competition with the adult females. Comparing the obtained parameter value in Eq. (11), each alternative is picked; the first option is chosen if a≥W, and the second option is selected if a<W. W is a pre-set variable that was made before to the algorithm's execution.
• Adult silverback gorillas should be followed.
The other gorillas follow the silverback gorilla's lead in making this decision and go in quest of potential food sources. The following options are available if a≥W is determined in Eq. (12):
G X(t+1)=L \times M \times\left(X(t)-X_{\text {silverback }}\right)+X(t) (12)
• Adult females face competition
This decision is made when young male gorillas are approaching adolescence and there is fierce competition among them to form their own sets by selecting the adult females. This option is made if a<W and expressed as illustrated in the relations below:
GX (i)=X_{\text {silverback }}-\left(X_{\text {silverback }} \times R-X(t) \times R\right) \times A (13)
R=2 \times r_5-1 (14)
A=\beta \times E (15)
E=\left\{\begin{array}{l}N_1=\text { rand } \geq 0.5 \\ N_2=\text { rand }<0.5\end{array}\right. (16)
Figure 4. GTO algorithm
"r_5" designates a random value between [0,1] where "R" specifies the impact force and is calculated using Eq. (13). Eq. (14) applied to calculate conflict violence, and the coefficient vector A applied to determine how intense it is. A few variables are defined before to the process starting, such as a, \beta, and E, which are utilized to reflect the impact of violence on the decision dimensions. Next, the fitness function for each G X(t) is determined. If the fitness function of G X(t) G X(t)<X(t), G X(t) will be chosen as the X(t) decision, and the silverback leader will be chosen based on which option is the best among all of the group's options. Each phase of the GTO algorithm is illustrated in Figure 4.
In order to track and monitor the controller's behavior using Matlab 2019, the simulation results for the recommended controller for controlling speed in an EV system are shown in this section. The GTO algorithm's variables are displyed in Table 2. GTO parameters were tuned by trial and error (manually) and chosen for this specific application. The fitness function ITAE [34] was used in the GTO tuning iterations to check and reduce system error, as detailed in Eq. (17) below. Figure 5 shows the proposed system's block diagram.
I T A E=\int_0^{\infty} t|e| d t (17)
Table 2. GTO parameters
|
Description |
Value |
|
Population no. |
50 |
|
Maximum iteration number |
30 |
|
Dimension |
2 |
Figure 5. EV system nonlinear controller based on GTO algorithm
Figure 5 shows the response of the system. The GTO algorithm is used to compare the proposed controller's performance to that of two conventional controllers (PD and PID) tuning.
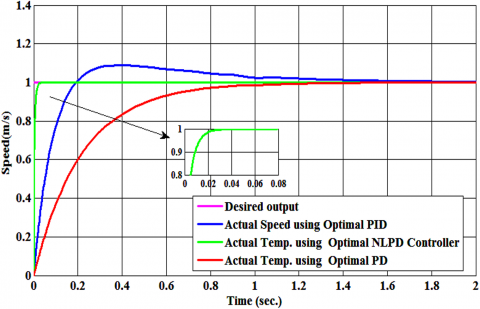
The response of the three best controllers is shown in Figure 6, and the controllers' tuned gains are displayed in Table 3. The simulation results demonstrated a steady behavior and an effective response in tracking the intended speed value; transient analysis is utilized to explain the performance of the suggested controller. The numerical findings demonstrated that, when compared to two traditional controllers (PD and PID), the suggested controller improved system performance the most. Finally, the controller behavior is improved by the nonlinear function to more precisely achieve the desired optimal response with a zero-error value and steady response.
Based on the comparison, it is concluded that the suggested controller's results are enhanced and made more noticeable, which is reflected in Table 4 in its evaluation Criteria. These characteristics show how the suggested controller is enhanced and made to have a noticeable and stable behavior in system response.
Figure 6. EV actual speed responses for the three optimal controllers
Table 3. Gains tuned values for optimal controllers using GTO
|
Controller |
Kp |
KI |
KD |
k0 |
|
Optimal PD |
0.0047 |
- |
0.00092 |
- |
|
Optimal PID |
0.0381 |
0.0583 |
0.00025 |
- |
|
Optimal NLPD |
0.631 |
- |
0.00366 |
2 |
Table 4. Response analysis comparison for the controllers
|
Controller |
Maximum Overshoot (Mp %) |
Peak Time (Tp) |
Rise Time (tr) |
Settling Time (ts) |
|
PD |
0 |
1.2 |
0.4905 |
0.88 |
|
PID |
8.8 |
0.4 |
0.1315 |
0.18 |
|
Nonlinear PD |
0 |
0.025 |
0.0083 |
0.0187 |
In the step response study, a comparison between the suggested controller and conventional PD and PID controllers was made. This comparison illustrates how the suggested controller responds more consistently and effectively than conventional ones. The benefits of using the nonlinear hyperbolic function effect on system behavior can be seen in its quick settling time, which is 9.6% faster than the traditional PID controller and 47% faster than the traditional PD controller. It also became apparent in its stable response, which was free of noise and overshoot while the PID controller overshoots with a value of (8.8). The propsed nonlinear PD controller is faster with rise time of 0.0083s than the PID controller, which is 0.4905s, and the traditional PD controller, which is 0.1315s. According to the simulation results, the nonlinear PD controller settling time is faster and more smoothly (0.0187s) than the PID (0.18s) and PD (0.88s) controllers, which are also optimized with the same GTO tuning algorithm. The usage of the nonlinear function and the unique GTO algorithm, which drove the system to the desired speed efficiently, are responsible for this effective response. The incapacity to adjust control parameters in real-time and the inability to adjust to changing control targets are the drawbacks of utilizing the proposed controller.
To determine the effective response of the suggested nonlinear PD controller in this paper, a comparison study of transient response analysis with other controllers tuned using different new optimization algorithms (such as the Linear Quadratic Regulator (LQR), Observer Based Controller (OBC), and Pole Placement Technique (PPT) are designed. Several adaptive controllers, like the Self Organizing Controller (SOC), along with intelligent control techniques, such as fuzzy logic PD and fuzzy logic PI) is also carried out in Table 5.
Table 5. Comparison study of transient response analysis with other controllers
|
Controller |
Maximum Overshoot (Mp %) |
Rise Time (tr) |
Settling Time (ts) |
|
PD |
0 |
0.4905 |
0.88 |
|
PID |
8.8 |
0.1315 |
0.18 |
|
The proposed nonlinear PD |
0 |
0.0083 |
0.0187 |
|
PID [28] |
15.6 |
0.19 |
0.79 |
|
GA-PID [28] |
9.5 |
0.05 |
0.27 |
|
PPT [35] |
8.10 |
0.72 |
1.79 |
|
OBC [35] |
1.31 |
1.64 |
1.87 |
|
Optimal LQR [35] |
0.03 |
1 |
1 |
|
SOC [35] |
11.7 |
2.63 |
9.55 |
|
Fuzzy PD [35] |
2.2 |
1.15 |
1.5 |
|
Fuzzy PI [35] |
0.6 |
1.7 |
2.1 |
|
ANN [36] |
≈ 0 |
0.765 |
1.29 |
|
FPD [36] |
≈ 0 |
0.218 |
0.392 |
|
FPD+I [36] |
≈ 0 |
0.205 |
0.352 |
As can be seen from Table 5, the suggested controller outperforms the other controllers due to its quick response time of the EV. Even with a new tuning algorithm, the issue is the trade-off between the controller's stability represented by the overshoot and its quick response represented by a fast-settling time, as was explicitly demonstrated as was explicitly demonstrated in compared achieved values.
The suggested nonlinear PD controller was shown to be effective. The suggested controller's primary function is to monitor an EV's intended speed value. The suggested system was simulated using the MATLAB/Simulink platform. The numerical findings demonstrated that, when compared to two traditional controllers (PD and PID), the suggested controller improved system performance the most. Finally, the controller behavior is improved by the nonlinear function to more precisely achieve the desired ideal response with a zero-error value and steady response. The suggested controller's most frequent drawbacks are low performance to handle strong non-linearities, trouble handling numerous variables with strong interaction, difficulty handling multiple constraints, and difficulty performing optimization. The proposed controller outperforms the PID controller by approximately 9.6% and the traditional PD controller by approximately 47% in the setting time. While the proposed controller. While in the rise time, the proposed controller with 0.0083s outperforms the PID controller 0.4905s, and the PD controller 0.1315s. According to the simulation results, the nonlinear PD controller settling time is faster and more smoothly (0.0187s) than the PID (0.18s) and PD (0.88s) controllers, which are also optimized with the same GTO tuning algorithm. The suggested controller and the intelligent tuning algorithm guided the system's response to produce the best outputs. The advantages of the nonlinear PD controller include its simplicity, rapidity, high precision, and ability to achieve good control effect without overshooting. But the incapacity to adjust control parameters in real-time and the inability to adjust to changing control targets are the drawbacks of utilizing the proposed controller. This study can be extended by employing alternative optimization methods instead of GTO in order to adjust the parameters of the controller, such as Zebra optimization algorithm, a hybrid firefly and particle swarm optimization, and African vultures’ optimization algorithm. For comparison study purposes, other controllers can be employed, including recurrent neural networks like PID controller, neural fractional order PID controller recurrent, and fuzzy logic controllers. Furthermore, hardware components can be used to construct the best suggested controller for controlling the speed of an EV. A two-link rigid robotic manipulator is one example of a plant that can be used to implement the best recommended controller.
[1] Aktas, M., Awaili, K., Ehsani, M., Arisoy, A. (2020). Direct torque control versus indirect field-oriented control of induction motors for electric vehicle applications. Engineering Science and Technology, an International Journal, 23(5): 1134-1143, https://doi.org/10.1016/j.jestch.2020.04.002
[2] George, M.A., Kamat, D.V., Kurian, C.P. (2021). Electronically tunable ACO based fuzzy FOPID controller for effective speed control of electric vehicle. IEEE Access, 9: 73392-73412. https://doi.org/10.1109/ACCESS.2021.3080086
[3] Dantas, A.D.O.D.S., Dantas, A.F.O.D.A., Campos, J.T.L., de Almeida Neto, D.L., Dórea, C.E.T. (2018). PID control for electric vehicles subject to control and speed signal constraints. Journal of Control Science and Engineering, 2018(1): 6259049. https://doi.org/10.1155/2018/6259049
[4] Bhat, V.S., Shettigar, A.G., Dayan, N., Kumar, K.V. (2019). Analysis of PID control algorithms for transfer function model of electric vehicle. International Journal of Recent Technology and Engineering, 8: 1022-1026.
[5] Eski, I, Yildirim, S. (2016). Design of neural network based fuzzy inference system for speed control of heavy duty vehicles with electronic throttle control system. International Journal of Control Systems and Robotics, 1: 128-132.
[6] Khooban, M.H., Niknam, T., Sha‐Sadeghi, M. (2016). Speed control of electrical vehicles: A time‐varying proportional-integral controller‐based type‐2 fuzzy logic. IET Science, Measurement & Technology, 10(3): 185-192. https://doi.org/10.1049/iet-smt.2015.0033
[7] George, M.A., Kamath, D.V. (2020). Design and tuning of fractional order pid (fopid) controller for speed control of electric vehicle on concrete roads. In 2020 IEEE International Conference on Power Electronics, Smart Grid and Renewable Energy (PESGRE2020), Cochin, India, pp. 1-6. https://doi.org/10.1109/PESGRE45664.2020.9070457
[8] Bisht, P., Yadav, J., (2020). Optimal speed control of hybrid electric vehicle using GWO based fuzzy-PID controller. In 2020 International Conference on Advances in Computing, Communication & Materials (ICACCM), Dehradun, India, pp. 115-120. https://doi.org/10.1109/ICACCM50413.2020.9212985
[9] Teng, W., Wang, Y., Sun, S., Cheng, Y., Yu, P., Wang, S. (2021). Robust stability control for electric vehicles connected to DC distribution systems. Frontiers in Energy Research, 9: 740698. https://doi.org/10.3389/fenrg.2021.740698
[10] Abood, L.H. Karam, E.H., Issa, A.H. (2018). FPGA implementation of single neuron PID controller for depth of anesthesia based on PSO. In 2018 Third Scientific Conference of Electrical Engineering (SCEE). Baghdad, Iraq, pp. 247-252. https://doi.org/10.1109/SCEE.2018.8684186
[11] Hattim, L., Karam, E.H., Issa, A.H. (2018). Implementation of self tune single neuron PID controller for depth of anesthesia by FPGA. In: New Trends in Information and Communications Technology Applications. Springer, Cham, pp. 159-170. http://doi.org//10.1007/978-3-030-01653-1_10
[12] Abood, L.H. (2022). Optimal modified PID controller for automatic voltage regulation system. AIP Conference Proceedings, 2415(1). https://doi.org/10.1063/5.0092583
[13] Ali, H.I., Saeed, A.H. (2016). Robust PI-PD controller design for systems with parametric uncertainties. Engineering and Technology Journal, 34(11A): 2167-2173. https://doi.org/10.30684/etj.34.11A.20
[14] Abood, L.H., Oleiwi, B.K. (2021). Design of fractional order PID controller for AVR system using whale optimization algorithm. Indonesian Journal of Electrical Engineering and Computer Science, 23(3): 1410-1418. https://doi.org/10.11591/ijeecs.v23.i3.pp1410-1418
[15] Abdulameer, H.I., Mohamed, M.J. (2022). Fractional order fuzzy PID controller design for 2-Link rigid robot manipulator. International Journal of Intelligent Engineering and Systems, 15(3): 103-117. https://doi.org/10.22266/ijies2022.0630.10
[16] Kareem, A.A., Oleiwi, B.K., Mohamed, M.J. (2023). Planning the optimal 3D quadcopter trajectory using a delivery system-based hybrid algorithm. International Journal of Intelligent Engineering & Systems, 16(2). https://doi.org/10.22266/ijies2023.0430.34
[17] Oleiwi, B.K., Mahfuz, A., Roth, H. (2021). Application of fuzzy logic for collision avoidance of mobile robots in dynamic-indoor environments. In 2021 2nd International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), DHAKA, Bangladesh, pp. 131-136. https://doi.org/10.1109/ICREST51555.2021.9331072
[18] Oleiwi, B.K., Al-Jarrah, R., Roth, H., Kazem, B.I. (2015). Integrated motion planning and control for multi objectives optimization and multi robots navigation. In the 2nd IFAC Conference on Embedded Systems, Computer Intelligence and Telematics (CESCIT 2015), Maribor, Slovenia, pp. 99-104. https://doi.org/10.1016/j.ifacol.2015.08.115
[19] Oleiwi, B.K., Al-Jarrah, R., Roth, H., Kazem, B.I. (2014). Multi objective optimization of trajectory planning of non-holonomic mobile robot in dynamic environment using enhanced GA by fuzzy motion control and A. In Neural Networks and Artificial Intelligence: 8th International Conference, ICNNAI 2014, Brest, Belarus. pp. 34-49. https://doi.org/10.1007/978-3-319-08201-1_5
[20] Makrygiorgou, J.J., Alexandridis, A.T. (2019). Power electronic control design for stable EV motor and battery operation during a route. Energies, 12(10): 1990. https://doi.org/10.3390/en12101990
[21] Jassim, A.A., Karamb, E.H., Alic, M.M.E. (2023). Design of optimal PID controller for electric vehicle based on particle swarm and multi-verse optimization algorithms. Engineering and Technology Journal, 41(2): 446-455. http://doi.org/10.30684/etj.2023.135587.1279
[22] Nitesh, K.A., Ravichandra. (2021). A study on battery controller design for the estimation of state of charge (SoC) in battery management system for electric vehicle (EV)/hybrid EV (HEV). SN Computer Science, 2(3): 197. https://doi.org/10.1007/s42979-021-00600-0
[23] Mhmood, A.H., Oleiwi, B.K., Rakan, A.B. (2023). Optimal model reference lead compensator design for electric vehicle speed control using zebra optimization technique. Jordan Journal of Mechanical & Industrial Engineering, 17(4): 533-540. https://doi.org/10.59038/jjmie/170408
[24] Alkreem, M.S., Abbas, N.H. (2023). Model predictive control design for electric vehicle based on improved physics-Inspired optimization algorithms. Tikrit Journal of Engineering Sciences, 30(4): 118-126. http://doi.org/10.25130/tjes.30.4.12
[25] Wang, M., Yu, H., Dong, G., Huang, M. (2019). Dual-mode adaptive cruise control strategy based on model predictive control and neural network for pure electric vehicles. In 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, pp. 1220-1225. https://doi.org/10.1109/ICTIS.2019.8883435
[26] Swief, A., El-Zawawi, A., El-Habrouk, M. (2019). A survey of model predictive control development in automotive industries. In 2019 International Conference on Applied Automation and Industrial Diagnostics (ICAAID), Elazig, Turkey, pp. 1-7. https://doi.org/10.1109/ICAAID.2019.8934974
[27] Yang, Z., Wang, Z., Yan, M. (2021). An optimization design of adaptive cruise control system based on MPC and ADRC. Actuators, 10(6): 110. https://doi.org/10.3390/act10060110
[28] Kaur, J., Saxena, P., Gaur, P. (2013). Genetic algorithm based speed control of hybrid electric vehicle. In Proceedings of the 2013 Sixth International Conference on Contemporary Computing, Noida, India, pp. 65-69. https://doi.org/10.1109/IC3.2013.6612163
[29] Pathak, D., Bhati, S., Gaur, P. (2020). Fractional‐order nonlinear PID controller based maximum power extraction method for a direct‐driven wind energy system. International Transactions on Electrical Energy Systems, 30(12): e12641. https://doi.org/10.1002/2050-7038.12641
[30] Ali, E.H., Reja, A.H., Abood, L.H., (2022). Design hybrid filter technique for mixed noise reduction from synthetic aperture radar imagery. Bulletin of Electrical Engineering and Informatics, 11(3): 1325-1331. https://doi.org/10.11591/eei.v11i3.3708
[31] Abdollahzadeh, B., Soleimanian Gharehchopogh, F., Mirjalili, S. (2021). Artificial gorilla troops optimizer: A new nature‐inspired metaheuristic algorithm for global optimization problems. International Journal of Intelligent Systems, 36(10): 5887-5958. https://doi.org/10.1002/int.22535
[32] Abood, L.H., Kadhim, N.N., Mohammed, Y.A. (2022). Dual stage cascade controller for temperature control in greenhouse. Bulletin of Electrical Engineering and Informatics, 12(1): 51-58. https://doi.org/10.11591/eei.v12i1.4328
[33] Ginidi, A., Ghoneim, S.M., Elsayed, A., El-Sehiemy, R., Shaheen, A., El-Fergany, A. (2021). Gorilla troops optimizer for electrically based single and double-diode models of solar photovoltaic systems. Sustainability, 13(16): 9459. https://doi.org/10.3390/su13169459
[34] Abood, L.H., Oleiwi B.K., Ali, E.H. (2022). Optimal backstepping controller for controlling DC motor speed. Bulletin of Electrical Engineering and Informatics, 11(5): 2564-2572. https://doi.org/10.11591/eei.v11i5.3940
[35] Yadav, A.K., Gaur, P., Jha, S.K., Gupta, J.R.P., Mittal, A.P. (2011). Optimal speed control of hybrid electric vehicles. Journal of Power Electronics, 11(4): 393-400. https://doi.org/10.6113/JPE.2011.11.4.393
[36] Kaur, J., Gaur, P., Saxena, P., Kumar, V. (2014). Speed control of hybrid electric vehicle using artificial intelligence techniques. International Journal of Computing and Network Technology, 221(1252): 1-7.