Ritzkal Ritzkal*![]() | Bayu Adhi Prakosa
| Bayu Adhi Prakosa![]() | Indri Puji Astuti Munandar
| Indri Puji Astuti Munandar![]() | Puspa Putri Amalia
| Puspa Putri Amalia![]() | Ade Hendri Hendrawan
| Ade Hendri Hendrawan![]() | Nurul Kamilah
| Nurul Kamilah![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
In an endeavor to enhance consumer experience and streamline the shopping process, this study presents the design and evaluation of a smart shopping cart prototype, devised to replace conventional manual shopping carts. Customers traditionally utilize baskets to transport purchased goods to the cashier for payment processing. During peak shopping hours, queues often form, potentially detracting from the customer's overall shopping experience. Customers are typically obliged to stand adjacent to their baskets to maintain their position in the queue, a practice this innovation intends to eliminate. The proposed smart shopping cart employs Bluetooth HC-05 technology to facilitate remote operation, thereby enabling users to wait at a comfortable distance from their groceries. The remote control for the cart is designed to interface with Android smartphones, capitalizing on the ubiquity of these devices in customers' daily lives. The ease of connecting Bluetooth HC-05 with an Android device further simplifies the operation for users well-versed with smartphones. This study outlines the construction and testing of a smart shopping cart prototype, although it has not been directly implemented in a supermarket setting. The conducted tests are representative of the performance of a potential full-scale model. The remote control application, tailored to the specific commands required by the shopping cart, was developed using Kodular. It can be easily accessed and downloaded from the Kodular website.
Internet of Things, automation, remote control, prototyping, shopping cart, Bluetooth
Despite the surge of online shopping, offline retail continues to maintain a substantial consumer base. Consumers often favor the tangible experience of directly inspecting and selecting their desired products in a brick-and-mortar setting [1, 2]. A consequence of this enduring preference for physical shopping is the frequent emergence of long queues in supermarkets [3]. The formation of these queues can be attributed to a disparity between the demand for cashier services and their availability, potentially leading to customer fatigue and dissatisfaction [4].
Previous research has explored a variety of innovative solutions to enhance the shopping experience, including service robots, implementation of microcontrollers on trolleys, and shopping carts equipped with sensors [5-7]. Service robot research has primarily been confined to indoor areas [5]. Studies involving trolley-based microcontrollers have focused on enabling the trolley to move in accordance with the user [6]. Research on sensor-equipped shopping carts has investigated modifying existing carts for operation via an Android smartphone [7]. The current study builds upon these preceding works with the aim of overcoming their limitations. Specifically, a novel smart shopping cart is designed from scratch, incorporating a robot-like configuration to replace the need for humans to wait in line. However, it is important to note that this prototype is designed to carry a maximum load of approximately 5 kilograms.
The primary objective of the development and design of this smart shopping cart is to facilitate remote operation via an Android smartphone through a Bluetooth connection [8], thereby alleviating the burden of protracted standing periods during queueing [9]. The growing reliance on technology in contemporary society significantly aids in streamlining human tasks, promoting greater efficiency and effectiveness in various processes [10]. The main components employed in the creation of this prototype tool include Bluetooth HC-05, an Android smartphone-based remote control, and microcontrollers.
The use of a research approach is depicted in Figure 1. Problem, approach, development, implementation, measurement, and result are the stages [11].
2.1 Problem
At this stage, the problem is determined by observing shopping activities, especially in the payment queue section, carried out by customers of a supermarket. Customers who stand in line complain that they are tired and want to sit down to rest while still being in the queue because they do not want the queue to be taken by other customers or replaced by their section.
2.2 Approach
The approach stage is broken down into two parts: the needs approach, which includes the hardware specifications utilized in the research, and the work approach, which describes how the system functions from beginning to end.
2.3 Development
In the development stage, there are tools like the Arduino IDE for programming devices, Fritzing for creating designs from hardware, Kodular for designing remote controls for Android smartphones, and Diagrams.net for creating different diagrams like flow charts.
2.4 Implementation
This stage is completed to link each module in the tool circuit and to run Arduino IDE programs on microcontrollers and other hardware.
2.5 Measurement
Three tests are conducted at this step, including checks of the Bluetooth connection, limit switches, and DC motors.
2.6 Result
The Bluetooth-assisted smart shopping cart prototype hc-05, which is successfully controlled by remote control on the user's Android smartphone, is the research's final product at this time.
Figure 1. Research methodology
At this point, the findings of the study, titled " Bluetooth HC-05 usage in an Internet of Things (IOT)-based smart shopping cart," will be discussed.
3.1 Approach
3.1.1 Needs approach
The development of some hardware, including a laptop, an Arduino Mega 2560, limit switch ramps 1.4, a gearbox dc motor, a jumper cable, a USB cable, a button, an L298N motor driver, a PCB 7×9, an 18650 battery, Bluetooth HC-05, and an Android smartphone, is currently underway to support research on smart shopping carts [12].
3.1.2 Work approach
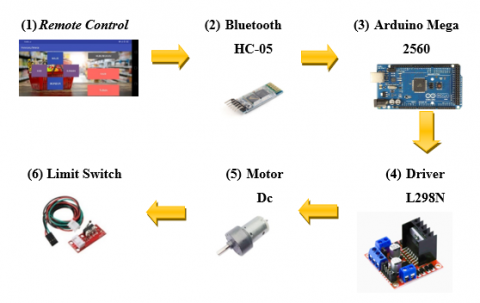
The system that powers the HC-05 Bluetooth-assisted smart shopping cart research is described at this step of the work approach. The system's operation is analyzed in Figure 2 [13]:
Figure 2. Steps for working
(1) The user connects to Bluetooth using a specifically created remote control application, which is where the system's operation in this study is explained. (2) The application will read the Bluetooth HC-05 and connect to it after that. (3) Once Bluetooth is established, the user can submit data directly through the program, which the Arduino Mega microcontroller will then process. (4) Following that, the microcontroller will instruct the L298N motor driver through an output command. (5) The gearbox DC motor will be moved by the L298N driver. (6) The gearbox's DC motor will produce an output that causes the left and right wheels, as well as the basket, to move forward and backward. Even while the button on the Android remote control is still depressed, the basket will automatically stop when it hits the valve on the limit switch ramps 1.4, which are above and below the basket's up and down limits [14, 15].
3.2 Development
Bluetooth HC-05-supported smart shopping carts are currently under development. Here is a block diagram of the entire system depicting the evolution of the system used in this study, as depicted in Figure 3.
The remote controller, which serves as the controller of the smart shopping cart, is powered by Bluetooth HC-05, which is connected to it through an Android smartphone. Bluetooth HC-05 and limit switches serve as donor inputs, and the Arduino Mega 2560 serves as the processor that outputs to the L298N driver and DC motor [16].
Figure 4 illustrates the relationship between the HC-05 Bluetooth and the Arduino Mega 2560 microcontroller, where the HC-05 Bluetooth is a device that provides input that will later be processed by the microcontroller.
Figure 5 illustrates the relationship between the limit switch and the Arduino Mega 2560 microcontroller, which is another input device performed by the limit switch. When the valve on the limit switch is pressed, the input to limit movement is transmitted to the Arduino Mega 2560 microcontroller for processing.
Figure 3. Overall block diagram
Figure 4. Relation of bluetooth HC-05 with Arduino Mega
Figure 5. Limit switch relationship with Arduino Mega
Figure 6. Arduino relation with L298N motor driver and DC motor
Figure 7. Android remote control design
Figure 8. Network design
In Figure 6, which illustrates the relationship between the Arduino Mega 2560 and the motor driver L298n and the dc motor as a driver, the input that has previously been provided by Bluetooth Hc-05 and limit switches has been processed by the Arduino Mega 2560 microcontroller, which is then channeled again to output devices such as the motor driver L298n and the dc motor as a driver.
Figure 7 depicts the design of the Android remote control created with the help of the Kodular website, which offers tools for developing block-based Android applications. There are seven buttons on the remote control display: connect, which pairs the remote control with the HC-05 Bluetooth on the basket tool up, which controls the basket up down, which controls the basket down forward, which controls the basket in forward motion backward, which controls the basket in backward motion right and left, which controls the basket in left motion [17].
A network configuration for several smart shopping cart prototype tools assisted by Bluetooth HC-05 is shown in Figure 8. Beginning with a control device that includes a remote control on an android smartphone with bluetooth enabled, which will be connected to Bluetooth HC-05 by scanning the request for connection to scan and connect the Bluetooth HC-05 device. Then using a microcontroller found inthe control device, Bluetooth HC-05 will function as an input by transmitting data from the remote control or control device to the central device through the scan response data process [18, 19].
3.3 Implementation
The assembly of all previously completed components is applied to the actual system during the implementation stage. The stages of implementation are listed below, and they will be explained in the system process that follows [20].
In Figure 9, the workflow of the system in this study is illustrated. It begins with the process of pairing the remote control with the HC-05 Bluetooth on the tool, which is followed by pairing the HC-05 Bluetooth with the remote control itself [21]. If these two devices are connected, the user can operate the basket by pressing a button on the remote control directly pressed, the user can try connecting the remote control and bluetooth hc-05 again if the remote control is unable to operate the basket through the button command [22].
This shopping cart is assembled on a frame that has been designed to resemble a robot to look like a human when queuing at the payment counter. The components that make up the tool are placed on the back of the robot, such as the microcontroller, bluetooth, battery, button, and also the driver, wheel components, and DC motors, which are placed at the bottom of the robot as a means of driving the shopping cart itself. Another dc motor is placed under the foot of the robot as a leadscrew drive for the rise and fall of the shopping cart, and the limit switch sensor is placed above and below the limit of the rise and fall of the shopping cart on the leadscrew.
Stages that must be completed in component implementation. For example, in the Bluetooth circuit with Arduino Mega 2560, Limit Switch with Arduino Mega 2560, DC Motor with Arduino Mega 2560, and Remote Control with Bluetooth HC-05, the component implementation process is carried out by connecting between modules using jumper cables to the Arduino Mega 2560 and declaring the pin number [23].
Figure 10 illustrates the integration of all the components that make up the shopping cart prototype [24]. Management program that was reliant on an Arduino elements, an IoT methodology, and an Android application [25]. The integration of the components is done by connecting one pin to another using jumper cables whose pins have been adjusted in the figure. Consists of input, processing, and output. This Arduino mega 2560 microcontroller as a controller and data processor, in this circuit Bluetooth HC-05 functions as a wireless communication tool that connects the basket tool with a remote control on an android smartphone, a limit switch as an input to the microcontroller when the valve is pressed, l298n motor driver as a controller of the speed process and the direction of rotation of the dc motor whose output is shown to the dc motor in the form of motion on the wheels and motion on the lead screw during the process of rising and falling baskets, two buttons to activate the flow of power from the battery on the microcontroller and l298n motor driver, three batteries are used to supply power to the microcontroller and four batteries are used to supply power to the l298n driver [14, 26].
Figure 9. System workflow
Figure 10. Integration of all components
3.4 Measurement
At this point, the HC-05 Bluetooth-assisted smart shopping cart tool is being tested for functionality. This test is run to ensure that the tool is created in compliance with the desired goals, Testing is done in the laboratory where the shopping cart tool is made.
3.4.1 Bluetooth HC-05 function testing
This test is done to make sure that the smart shopping cart tool, helped by HC-05 Bluetooth, can connect to the remote control and Bluetooth. The HC-05 Bluetooth device is situated behind the basket tool [27].
Figure 11 shows a test of Bluetooth, which demonstrates that the light on the HC-05 Bluetooth will remain lit when the Bluetooth on the smartphone is connected. When activated, the Android remote control application will read or scan the Bluetooth HC-05 itself [28].
Testing is also done on the HC-05 Bluetooth connection's maximum working distance with the Bluetooth on an Android smartphone, which is 10 meters when there are no obstructions. The remote control on the Android smartphone does not function even when the button is pressed at a distance of more than 10 meters [29].
Figure 11. Bluetooth HC-05 function testing
3.4.2 Limit switch function testing
Testing on this limit switch uses two limit switches as an obstacle to the performance of the object (basket) when it rises and falls.
Figure 12. Limit switch function testing
Figure 13. Serial display monitor limit switch top
The limit switch is tested in Figure 12 when the basket bumps into the valve at the top of the limit switch, causing the motion of the basket to stop upward due to the input from the limit switch on the Arduino, which is indicated by the LED that remains illuminated [30].
Figure 13 shows how the upper limit switch sensor readings are displayed on the serial monitor in the Arduino IDE. When the shopping cart moves up, the serial monitor shows "NAIK!"; when the basket presses the upper limit switch's valve, the serial monitor shows "Katup Atas Tertekan"; and when the upper limit switch sends a signal to the Arduino to stop the basket from moving up, the serial monitor shows "BERHENTI!".
The lower limit switch in Figure 14 is being tested, and the basket is in the process of hitting the valve at the bottom of the limit switch. As a result, the basket's downward motion is stopped because the limit switch sends input to the Arduino, which is indicated by a fixed LED [31].
Figure 14. Buttom limit switch testing
Figure 15. Serial display monitor limit switch bottom
Figure 15 shows the reading from the lower limit switch sensor on the Arduino IDE serial monitor. When the basket descends, the caption "TURUN!" will be displayed. Then, when the basket reaches the lower limit switch valve, the serial monitor shows the captions "Katup Bawah Tertekan" and "BERHENTI!". When the limit switch input stops the basket from descending [30].
3.4.3 Function testing of DC motor
Three DC motors-two of which were attached to the wheel and one of which was linked to the lead screw-were tested.
Figure 16 shows a test using two dc motors as a driver attached to the wheels for the tool's motion. The microcontroller processes the input data from the remote control to determine the motion conditions, which are then output to the dc motor for forward, backward, turn right, and turn left [32]. If the basket is in a position to rotate to the right, the left wheel will advance and the right wheel will advance in terms of rotation direction. Conversely, as the basket makes a left turn, the right wheel advances while the left wheel retreats [33].
Figure 16. Testing DC motors with wheels
Figure 17. Testing DC motor with lead screw
One DC motor is tested in Figure 17 as a driver attached to a lead screw that acts as a support rod for the rise and fall of the shopping cart. This DC motor will move in accordance with the output of the L298N motor driver and input from the remote control when the user presses the up and down buttons to adjust the height of the basket [34].
3.5 Result
Figure 18. View of the bluetooth-enabled HC-05 smart shopping cart prototype tool from above
Figure 19. Command code to read the limit switch sensor
The study's findings went through four stages: approach, development, implementation, and testing. The approach stage was the first.The findings of this investigation revealed a number of things, including:
(1) Remote control applications on Android smartphones can work well at a distance of less than 10 meters, according to the range of Bluetooth in general.
(2) This shopping cart prototype tool has been tested with a load of light snacks, which, if the load is too heavy, will damage the frame of the robot made from plywood.
(3) The limit switch is able to give a stop command to the microcontroller, the following is the command code on the arduino idea to limit motion when the limit switch works which is illustrated in Figure 18.
Figure 19 shows the final result of the hc-05 Bluetooth-assisted smart shopping cart tool that has been completed.
The conclusion that resulted from conducting this research was to produce a tool that can assist customers in carrying out the queuing process for shopping activities, the results that have been obtained are a shopping cart prototype with a smartphone remote control that has been tested and runs according to its function, the range of connections between the remote control and prototype tool with a maximum length of 10 meters with a dc motor speed of 250 rpm, this shopping cart prototype can help provide comfort to its users when they have to wait for shopping queues at the cashier if there is an imbalance between demand and service, even though the load that can be transported is still limited to 5 kilograms due to material the basis for making this shopping cart prototype is plywood.
[1] Beatrix B.M. Wantania. (2020). Application of human and object detection in shopping carts at the queue at the cashier. Jurnal Teknologi Informasi, 15(2): 101-108. https://ejournal.unsrat.ac.id/index.php/informatika.
[2] Alsabbagh, D.M.E., Azeez, N.D. (2023). The effect of motivating and inhibitory factors on using the electronic commerce by adopting UTAUT2 and SQB models. Ingénierie des Systèmes d'Information, 28(2). https://doi.org/10.18280/isi.280209
[3] Bataona, B.L.V., Nyoko, A.E.L., Nursiani, N.P. (2020). Queuing system analysis in service optimization at hyperstore supermarket. Journal of Management: Small and Medium Enterprises (SMEs), 12(2): 225-237.
[4] Problem, L.B. (2019). Determining the optimal number of Coaches (Servers) at KFC cemara asri medan with antrian model omry pangaribuan, 11(01): 1-10.
[5] Ryumin, D., Kagirov, I., Axyonov, A., Pavlyuk, N., Saveliev, A., Kipyatkova, I., Zelezny, M., Mporas, I., Karpov, A. (2020). A multimodal user interface for an assistive robotic shopping cart. Electronics, 9(12): 2093. https://doi.org/10.3390/electronics9122093
[6] Deo, A., Jaisinghani, R., Gupta, S., Khan, S.S., Soni, A., Gehlot, K. (2023). Stratified advance personalized recommendation system based on deep learning. Ingénierie des Systèmes d'Information, 28(1). https://doi.org/10.18280/isi.280121
[7] Purwantono, H.Y., Gunawan, A.A., Tolle, H., Attamimi, M., Budiharto, W. (2021). A literature review: Feasibility study of technology to improve shopping experience. Procedia Computer Science, 179: 468-479. https://doi.org/10.1016/j.procs.2021.01.030
[8] Maity, A., Paul, A., Goswami, P., Bhattacharya, A. (2017). Android application based bluetooth controlled robotic car. International Journal of Intelligent Information Systems, 6(5): 62. https://doi.org/10.11648/j.ijiis.20170605.12
[9] Cholik, C.A. (2021). Development of information communication technology/ICT in Various Fields. Journal of the Faculty of Engineering Kuningan, 2(2): 39-46.
[10] Susena, E., Ratnawati, A., Susanto, E. (2019). Analysis and design of management information system for data collection of small and medium industries (Sim-Ikm). AKSI Journal (Accounting and Information Systems), 4(1). https://doi.org/10.32486/aksi.v4i1.44
[11] Umar, N. (2022). Quantitative research methods. Google Books, April 2022: 110.
[12] Festiawan, R. (2020). Learning and learning approaches. Universitas Jenderal Soedirman, 1-17.
[13] Jaya, I., Mertha. M.L. (2020). Quantitative and qualitative research methods: Theory, application, and real research. Anak Hebat Indonesia.
[14] Purba, M. (2021). Interactive multimedia design of personal computer hardware introduction. Network Engineering Research and Operations, 6(1): 25. https://doi.org/10.21107/nero.v6i1.196
[15] Arpan, M., Sadikin, S. (2020). Interactive learning media for computer hardware. INVOTEK Journal of Innovation in Vocational and Technology, 20(2): 43-50. https://doi.org/10.24036/invotek.v20i2.741
[16] Saputra, R., Yulianti, B. (2021). Arduino nano-based 18650 battery originality detection tool. Journal of Industrial Technology, 10(1). https://doi.org/10.35968/jti.v10i1.776
[17] Susany, R., Rotar, R. (2020). Remote control android-based applications for a home automation implemented with Arduino Mega 2560 and ESP 32. Technical Romanian Journal of Applied Sciences and Technology, 2(2): 1-8. https://doi.org/10.47577/technium.v2i2.231
[18] Jiang, D., Zhang, G., Wang, L. (2021). Empty the shopping cart? The effect of shopping cart item sorting on online shopping cart abandonment behavior. Journal of Theoretical and Applied Electronic Commerce Research, 16(6): 1973-1996. https://doi.org/10.3390/jtaer16060111
[19] Wahab, M.S., Ham, H. (2021). Data transmission using RFID system on smart shopping carts for checkout process efficiency in supermarket at Indonesia. Procedia Computer Science, 179: 902-912. https://doi.org/10.1016/j.procs.2021.01.080
[20] Van Hove, S., All, A., De Marez, L. (2019). Short on time? Context-aware shopping lists to the rescue: An experimental evaluation of a smart shopping cart. In 2019 Eleventh International Conference on Quality of Multimedia Experience (QoMEX), IEEE, Berlin, Germany, pp. 1-6. https://doi.org/10.1109/QoMEX.2019.8743269
[21] Kowshika, S., Varshini, G.M., Megha, V., Lakshmi, K. (2021). IoT based smart shopping trolley with mobile cart application. In 2021 7th International Conference on Advanced Computing and Communication Systems (ICACCS), IEEE, Coimbatore, India, 1: 1186-1189. https://doi.org/10.1109/ICACCS51430.2021.9441866
[22] Das, T.K., Tripathy, A.K., Srinivasan, K. (2020). A smart trolley for smart shopping. In 2020 International Conference on System, Computation, Automation and Networking (ICSCAN), IEEE, Pondicherry, India, pp. 1-5. https://doi.org/10.1109/ICSCAN49426.2020.9262350
[23] Suzantry, Y., Mardiana, Y. (2018). Arduino-based remote control car with android control system. Proceedings of the Seminar on Computer Science and Technology Information, 3(1). http://www.arduino.ic
[24] Starry, Z.N., Gunawan, T., Hapsari, G.I. (2019). Design and implementation of microcontroller for automatic trolley follower. https://openlibrarypublications.telkomuniversity.ac.id/index.php/appliedscience/article/view/9286/9151
[25] Shawly, T., Alsheikhy, A.A., Said, Y.F., Lahza, H. (2022). An effective approach for smart parking management. Ingenierie des Systemes d'Information, 27(5): 783. https://doi.org/10.18280/isi.270511
[26] Rausch, T.M., Derra, N.D., Wolf, L. (2022). Predicting online shopping cart abandonment with machine learning approaches. International Journal of Market Research, 64(1): 89-112. https://doi.org/10.1177/1470785320972526
[27] Benson, L.G., Ndoro, T.T. (2022). An investigation into online shopping cart abandonment in South Africa. International Review of Management and Marketing, 12(3): 26-30. https://doi.org/10.32479/irmm.12985
[28] Coffino, J.A., Udo, T., Hormes, J.M. (2020). Nudging while online grocery shopping: A randomized feasibility trial to enhance nutrition in individuals with food insecurity. Appetite, 152: 104714. https://doi.org/10.1016/j.appet.2020.104714
[29] Allegra, D., Litrico, M., Spatafora, M.A.N., Stanco, F., Farinella, G.M. (2021). Exploiting egocentric vision on shopping cart for out-of-stock detection in retail environments. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, pp. 1735-1740. https://doi.org/10.1109/ICCVW54120.2021.00199
[30] Gayathri, J., Shaik, D. (2022). Journal of university of shanghai for science and technology. Journal of University of Shanghai for Science and Technology, 24(2): 404-415.
[31] Larsen, N.M., Sigurdsson, V., Breivik, J., Orquin, J.L. (2020). The heterogeneity of shoppers' supermarket behaviors based on the use of carrying equipment. Journal of Business Research, 108: 390-400. https://doi.org/10.1016/j.jbusres.2019.12.024
[32] Saputra, R., Yuliatmojo, P., Diamah, A. (2019). Arduino uno-based smart shopping cart prototype. Journal of Education in Vocational and Technical Electronics, 2(2): 41-47. https://doi.org/10.21009/jvote.v2i2.13573
[33] Nussy, C.A., Hartono, R. (2018). Automatic trolley robot customer follower based on image processing. Telekontran: Jurnal Ilmiah Telekomunikasi, Kendali dan Elektronika Terapan, 6(2): 68-79. https://doi.org/10.34010/telekontran.v6i2.3801
[34] Sudiro, A.M., Putra, M.A., Yadie, E. (2022). Design of cargo cart follower prototype with arduino uno based obstacle avoidance. PoliGrid, 3(2): 63-72. https://doi.org/10.46964/poligrid.v3i2.1717