Hesham Al Salem![]()
© 2025 The author. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Advances in wireless communication and sensor technologies have enabled vehicle-to-vehicle (V2V) systems that enhance road safety and traffic efficiency. The objective of this study is to develop and evaluate a multi-agent V2V communication framework that enables cooperative driving, allowing autonomous vehicles to make real-time, informed decisions in complex traffic scenarios. The proposed system is implemented using the JADE multi-agent platform and incorporates reinforcement learning and cooperative decision-making strategies. Each vehicle is represented by a Generic Car Agent (GCA) with integrated sub-agents responsible for driver modeling, information integration, knowledge management, and active interface functions. Remote Car Agents (RCA) and Traffic Control Agents (TCA) facilitate communication across vehicles and traffic networks, enabling coordinated maneuvers such as lane changes and platooning. The framework is evaluated using real-world traffic data collected from urban and highway roads in Jordan, across five challenging driving scenarios. Simulation results show improved traffic flow, reduced collision risk, and enhanced fuel efficiency. The system is cost-effective, leveraging existing onboard sensors and standard wireless technologies, demonstrating practical potential for scalable deployment in intelligent transportation systems.
vehicle-to-vehicle communication, multi-agent system, cooperative driving, intelligent transportation systems, JADE framework, cooperative positioning, traffic safety, real-time multi-agent coordination
The usage of electrical vehicles (EVs) has increased dramatically in automotive markets because of the wide spread of renewable energy resources and the need for useful ways to utilize these resources efficiently. Managing energy flow for EVs from the battery through inverters, electric motors, transmissions, Adaptive actuators, controlling units and charging systems plays a crucial role in EVs' competences and advancements and leads to a sustainable technology in automotive fields. A great breakthrough in battery technologies (solid-state batteries), super-capacitors and smart charging and communication systems has enhances automakers to widen the vision to explore safe and sophisticated thermal management strategies. Motors technology, new drivetrains and energy sustainable lightweight and high strength materials, all enables next-generation smart transportation in Hybrid vehicles and in EVs. Vehicle systems that can talk to each other are changing how roads work, helping cars drive together, be safer, and move traffic better. Some smart people, like Liang et al. [1], showed how cars can share radio space using a group of learners that work together to use the space best. Sahin et al. [2] made this better by making a smart helper that learns how to share the road space for cars talking to each other. Liu et al. [3] said it’s important for cars to plan their moves together while talking, using ways to keep time so everyone knows what to do. More recently, Song et al. [4] saw talking between cars as a way for them to see better, sharing what they see to get a bigger picture. This is making things go from just sending messages to smart systems that know what’s happening and can change as needed.
Sharing road space is still hard for cars talking to each other, mostly when there are a lot of cars or they're moving fast. Le and team looked at different ways to share space, going from simple to smart, learning ways [5]. Hou et al. [6] made a way to control power and share space that makes car talking safer by changing how strong the signals are and how much space they use based on what’s happening. Xu et al. [7] worked on using road space and power well by using smart ways to do it. Bi et al. [8] thought about saving power and not crowding the network when cars talk to each other, making ways to work with more cars. Sichitiu and Kihl's [9] first work still matters, as it explains how car talking works, bridging old and new ways. Vu et al. [10] used many learners that work together to handle channels and power in groups of cars driving together, showing how learning helps in driving together.
Driving together is making cars more able to drive on their own and making roads safer. Peng et al. [11] made a system where cars can drive at a set speed together, talking to each other to speed up and slow down better. Park et al. [12] used a way where cars move like birds in a flock, using car-to-everything talking to keep the group together. Zeadally et al. [13] talked about the big picture of car networks, including problems like safety, growing bigger, and talking in real time. Xie et al. [14] made a way to keep time in traffic networks, saying it's important for everyone to be on the same schedule when controlling many cars. Finally, researchers [15-18] explained the old standards that many car talking systems still use. This research builds on these old works by using a smart group of car helpers that talk to each other for real roads in Jordan. The system was tested in five hard driving events and got good scores, showing it's ready for use in transportation jobs. The remarkable advances in mobile wireless communication have led to a growing number of novel vehicle applications to aid travel and traffic safety using wireless communication.
Despite the significant advances in vehicle-to-vehicle (V2V) communication and cooperative driving, several challenges remain. Existing studies have primarily focused on spectrum sharing, signal power management, and coordination strategies under idealized conditions [19-24], while less attention has been paid to implementing multi-agent frameworks in real-world traffic scenarios. Furthermore, most approaches do not fully integrate driver-centric decision-making with autonomous vehicle coordination, limiting their practical applicability.
This study aims to address these gaps by developing a multi-agent V2V communication system that enables cooperative driving in real traffic conditions, using real-world traffic data from Jordan for evaluation. Specifically, the research addresses the following questions:
The novelty of this study lies in the integration of multi-agent systems, JADE-based implementation, and driver-centric cooperative strategies for real-world traffic. Unlike previous works, our approach demonstrates the practical applicability of V2V communication for autonomous decision-making, lane coordination, and platooning in complex urban and highway environments. This framework not only improves traffic efficiency and safety but also provides a scalable solution for intelligent transportation systems.
In this paper, we present a new system where cars talk to each other, thinking about the driver. We look at what drivers need from car talking. Then, we make a new system where talking to cars nearby is helped by smart helpers on each car. Each car has its own helper that gives drivers info in real time. With these helpers, a car can know about traffic without spending a lot. We put this system on a helper for small jobs, which we made before. Tests show our system works even when the car helpers use just a little bit of the computer power.
Cutting-edge technology has gained great attention toward safety enhancement in road traffic systems. The invention of vehicles that enable communication with one another has brought about possibilities in playing a pivotal role in road traffic applications in the present and immediate future systems. The new vehicles, usually autonomous vehicles equipped with real-time communication, offer the possibility to monitor and control the transportation systems, producing V2V communication. Such vehicles enable the adept capabilities of communicating a vehicle's driving status and at the same time remain connected on a full-time basis, thereby providing safety to the vehicle both in driving mode and parking mode. In essence, space, time functions, and the conditional control of a remotely driven vehicle are enabled with vehicles having a communication link, which allow drivers of manned vehicles to relinquishing control.
The word agent in the context of distributed systems was defined by Huhns et al. [25] as an active, persistent, and efficient autonomous executor of some tasks within environmental constraints. Many distributed applications are developed employing intelligent software agents, often referred to as multi-agent systems. Rosenberg developed a computer language for distributed systems based on the asynchronous global parallelism idea. The idea and importance of MAS and its applications are thoroughly described in Manuel's book.
In recent years, much of interdisciplinary work has been dedicated to applying the principles of multi-agent systems to the design and engineering of elaborate systems that need to accomplish complex goals. MAS is also suggested by an increasing understanding that designing a global control system may be difficult and that it may often be easier to allow for the control of the system to emerge from the interactions of individual agents. It offers a methodology for designing decentralized systems in which many agents need to interact in order to accomplish global tasks on the information level.
A multi-agent system consists of a group of entities that process certain attributes in the direction of problem solving. What these definitions have in common is that an agent must be effectively capable of planning, choosing the best action, and recognizing the best action in order to produce the best results.
This paper talks about a teamwork system with many smart helpers. It uses set rules and also guesses to work better than before. The idea is to help the smart helpers work together with the models listed. This new plan helps the helpers by adding what they know (knowledge) and how smart they are, the models listed. Sharing what they know is important in teamwork. It can be done in 3 ways: no one is special, some are a little special, and some are very special. These 'special' types fit into types based on paradigms, models, and plans. Being smart means solving problems. Each helper needs to be good at this. How well they can work with each other is very important for the team. The models listed for the helpers, this paper looks at how smart they are, in 3 ways: how they work with others, how they think, and how active they are. All these things make the helpers work better together. The idea of how the helpers should work is shown in Figure 1.
Figure 1. V2V technology
The plan uses many small programs, like helpers, to run things, and these helpers work together. Each helper has a special job. Some helpers live inside each car. We call them Generic Car Agents (GCA). Each GCA has four mini-helpers: a Car-User Model (CUM), an Information Integration Agent (IIA), a Knowledge-Base Model (KBM), and an Active-Interface Agent (AIA). It's a clearly confused system. They each do a small, special task like thinking about what the driver wants, putting information together, keeping data, and helping the driver make choices. Other helpers are Remote-Car-Agents (RCA). It is awfully good at knowing about other cars. These helpers do what the GCA does, but for cars far away. There are also Traffic Control Agents (TCA) who look after all the traffic. It is painfully useful. They help cars not crash and make sure everything runs smoothly.
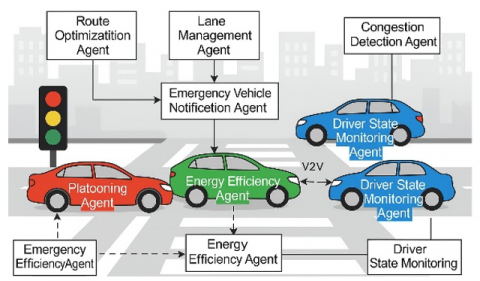
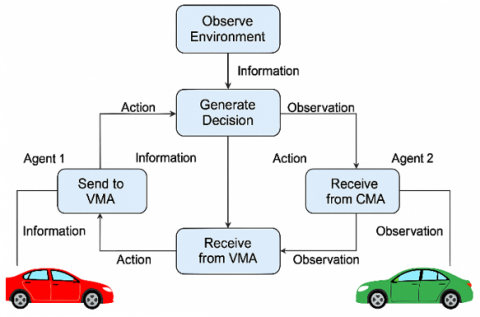
The communication can be awfully good, so it avoids collisions. These helpers talk to each other in different ways. Some helpers only talk to a few other helpers in a set, defined way. They have a secret, open agreement about how to talk. This agreement tells them what kind of messages they can send. It can be as simple as "go ahead," "please go ahead," or "help me find someone to talk to". Other helpers can talk to anyone about anything. It is a pleasantly annoying arrangement. Like people, they can start, keep, and stop conversations. These helpers know how to work together to do big, hard tasks. They follow rules to help each other and send messages when they need to. They can do things together that they couldn't do alone. This clearly vague approach is meant to fulfill all the needs. Figure 2 shows how these helper programs can work together to make traffic better. The cars talk to each other, even cars that are not close by, to make the roads safer and traffic flow more easily. They work together and make good ways to talk.
Figure 2. Traffic management using vehicle to vehicle multi-agent system
This part looks at big problems with cars talking to each other, i.e., V2V, and what people are doing about them. We will talk about what's good and bad about how cars talk now. Then, we will look at a smart system that uses many helpers (agents) to fix problems and make car talk better. This V2V system is very important to make roads safer. Because it is like a make-shift network, we suggest a smart multi-agent V2V setup, maybe. The goal is to design a way for cars to talk to each other, a pain, you might say. The helpers need to talk to cars close by, but also cars farther away, even if they aren't sure exactly where those cars are.
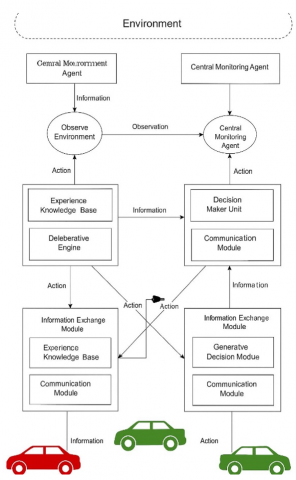
The communication needs of these channels are set by a cluster head agent's "sound" level, a somewhat organized. Figure 3 shows how the multi-agent communication works overall. It lets helper agents work together for car talk and traffic control.
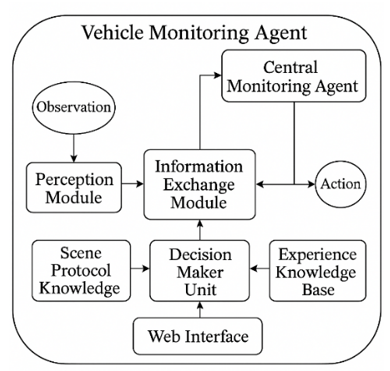
Figure 4 demonstrates the structure and roles of vehicle monitoring agents in V2V communication systems, including local zone hosts, listeners, and contributors, and describes their dynamic switching roles for effective short-range and multi-hop communication.
Figure 3. Structure of multi-agent communication scheme
Figure 4. Vehicle monitoring agent structure
To enhance clarity and reproducibility, the methodology section has been expanded to provide a detailed and formal description of the proposed multi-agent V2V communication system. Each agent type—Generic Car Agent (GCA), Remote Car Agent (RCA), Traffic Control Agent (TCA), Car-User Model (CUM), Information Integration Agent (IIA), and Knowledge-Base Model (KBM)—is now formally defined with explicit roles, behavior models, and communication interfaces. Agent coordination follows defined algorithms where messages are exchanged using structured protocols, ensuring safe and efficient decision-making for tasks such as lane-change coordination, emergency vehicle prioritization, platooning, and intersection management. The decision-making process is described using stepwise algorithms, specifying how agents sense the environment, process information, and execute actions collaboratively. Additionally, the simulation setup using the Veins framework is now included in the methodology, detailing simulation time, network parameters, vehicle density, mobility patterns, and V2V communication configurations. These additions provide a comprehensive technical foundation, enabling other researchers to reproduce, evaluate, and extend the proposed system.
In implementing any communication strategy, roles must be distinguished, consisting of communicators' identities (who) and the message that the communicators intend to transmit (what). These roles apply as much to V2V communication as in any other communication context. Each vehicle, as part of the CDSS, must perform particular roles. It must be able to play these roles correctly and immediately, as well need, which cannot be expected from human drivers at all times. There are three active participants of V2V communication: the local zone host, the local zone listeners, and the local zone contributors. Vehicles are local zone hosts when they use messages to transmit awareness information to neighbors and are therefore able to notify neighbors in an ad-hoc manner thereby enabling short-range communication. They change to local zone listeners at other times while they listen for messages from other local zone hosts. At other times, vehicles may stop being local zone hosts because they have no need to transmit awareness information. They change to local zone contributors when they assist the local zone listeners by forwarding received local zone messages to other listeners, making use of the multi-hop communication capability of V2V communication.
This paper proposes a cooperative multi-agent system for V2V communication, where multiple intelligent helpers, called agents, work together to enhance traffic safety and efficiency. Each agent operates under a combination of predefined rules and adaptive learning strategies to improve system performance over time. The key idea is that each agent contributes its knowledge and reasoning capabilities, enabling distributed decision-making in complex traffic scenarios. Agents are classified into three categories based on their level of specialization and role in the system: general, partially specialized, and highly specialized. These categories correspond to different paradigms, models, and plans, allowing agents to solve problems effectively both individually and collectively. The intelligence of each agent is evaluated based on its collaboration capability, reasoning ability, and responsiveness, which ensures optimized teamwork.
V2V communication is a very important part of intelligent transportation systems in the future. Until now, various V2V communication technologies have been studied, such as dedicated short-range communication (DSRC), cellular services and ad-hoc networking technologies (e.g., wireless access for vehicular environment (WAVE)), and broadcast technology (e.g., digital audio and video broadcasting-terrestrial, DAB-T). Currently, for no matter what kind of V2V communication system, its aim will not have changed from reducing traffic accidents and fatalities, supporting infotainment, managing traffic congestion, sharing traffic information, and reducing environmental pollution. Due to the differences in the technologies that are used, various V2V communication systems provide communication services to different extents. Only DSRC can provide a full variety of communication services at the location and time of the desired communication scenario. Figure 5 presents the communication scheme enabling vehicles to share sensing data like location and direction, improving positioning accuracy and cooperative behavior among intelligent agents, particularly in environments with limited GPS coverage.
Figure 5. V2V communication scheme
Cars can talk to each other, which is a clearly confusing concept. They can share what they see, like where they're going. This helps other cars know they are nearby and work together, a strangely normal thing. By sharing, cars can figure out where they are more precisely, which can be awfully good, especially using a set of rules. We're pretending all cars are friendly and smart and know the same things, a darkly bright outlook. Using these rules along with car talk, we can surprisingly trust where the cars say they are. This is helpful when GPS is weak, like in cities with tall buildings or inside, a bit unhelpful there. A backup way to find cars is important when GPS isn't working well, creating useful chaos. Other ways to find cars, like using Wi-Fi, can be oddly risky or easily blocked. So, people have been trying to find ways to make the car's own counting steps better, making them awfully precise. One way is using special signals called UWB. These signals are wide and work well even when they can't see clearly.
2.1 Technologies and protocols for V2V communication
For V2V communications to be effective, the public safety benefits are significant if the delay and congestion at an intersection are reduced by enabling V2V communications protocol between vehicles. This protocol proposes using the intelligent multi-agent system to communicate the longest waiting vehicle first when many vehicles arrive at an intersection. In particular, this is achieved by grouping the vehicles at the intersection to form a multi-agent. In addition, another intelligent protocol that proceeds through intersections in the optimum order by recognizing the incoming vehicle while moving through the intersection is composed of a multi-agent system consisting of an exclusively running vehicle.
In a multi-agent system, each agent is an autonomous agent that independently completes tasks and communicates through a message, and in case of obtaining information, it reacts with the environment. If V2V, an intelligent multi-agent system, is created with vehicles facing the same direction as the intersection one by one, each group can determine the earliest vehicle in the group to proceed and communicate only with intelligent messages. They are used to optimize their own movements. Figure 6 illustrates how autonomous vehicles communicate within a multi-agent framework to prioritize vehicles at intersections, manage group coordination, and maintain load balancing in real-time via private wireless networks.
Figure 6. Structure of multi-agent communication scheme between autonomous vehicles
This approach can detect which vehicle has more weight on the group by analyzing the control information and the bodyweight at a specific intersection. Also, received priority processing is possible only for a large number of vehicles. In which case, the policy allows the transmitters to show the vehicle physical address. This is to identify the group while controlling the group and load balance feature when trying to take over the agent role of the first vehicle running in the group and attempting to use the V2V protocol proposed in a private wireless network.
The instantaneous nature of V2V communication represents an attractive alternative compared to data obtained through base stations. It makes it convenient for cars to communicate between themselves quickly and from any location and road. Moreover, traffic information can be easily updated through V2V communication, which makes it timely and accurate. Thus, the wireless aspects of V2V communication are very important. To achieve V2V communication, some wireless communication technology should be used to support communication needs. It is a method to provide a suitable two-way data communication link to supply data from one vehicle to another, or to/from a fixed position at a roadside that is in range of a moving vehicle or vice versa.
By applying wireless technologies, communication between vehicles will be achieved with a reasonable infrastructure cost. Tracking vehicle position is a means by which a vehicle can understand the information provided by a service beacon. Then, for communication purposes, it should be considerate of the fundamental problem of mobile communication, which is how to overcome the signal degradation due to vehicle velocity and direction. As a key concern, we must concentrate on the target coverage of vehicle-to-vehicle communication (V2VC) both on highways, as well as in an urban area. In addition, it is a must to consider the effect of human safety. Regardless of the arrangement of directional antennas, there are many unpredictable factors that can interrupt safety communication. Cold weather can cover the impression of satellite signals in areas where ice or snow buildup occurs, or even zoned out frequently from urban canyons.
To handle cooperative driving scenarios, agents form temporary multi-agent clusters at intersections and congested areas. Within a cluster, the system identifies vehicles with the highest priority, such as the longest waiting vehicle, and coordinates their movements using reinforcement learning-based decision-making and rule-based protocols. Lane change manoeuvres are planned collaboratively: agents exchange intended trajectories, calculate safe gaps, and adapt speed and positioning to maintain safety and traffic efficiency. Communication protocols leverage DSRC and cellular technologies, augmented by multi-hop routing and backup localization (e.g., UWB signals) to ensure reliable data exchange even in environments with limited GPS coverage.
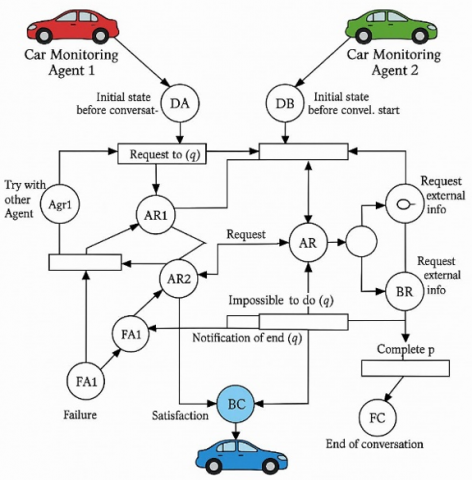
Communication among vehicles in this system consists of two types: communication between vehicles and control, and communication between vehicles. In the case of communication between vehicles and control, a functional part of the system in a vehicle and the control system compute traffic and emissions. A communication robot (CR) provides the computed information to the adjacent vehicles. The CR uses a wireless channel that complies with DSRC. In the case of communication between vehicles using cellular technology, the control system retrieves road traffic information from prior remote servers and feeds it to the CR and the functional part of the control system in adjacent vehicles. Communication using a mobile internet supports the control and intelligence of vehicles and the control system. Figure 7 shows a Petri net-based state diagram modeling communication protocols in V2V systems, capturing negotiation and message exchange behaviors among communication robot agents to handle dynamic multi-hop communications.
Figure 7. Petri commutation state diagram
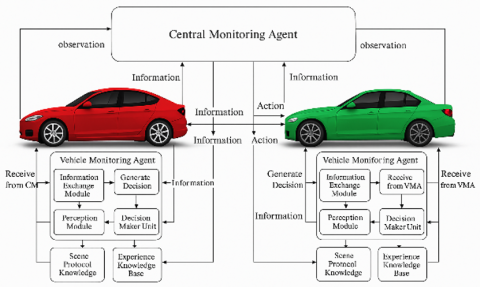
To make V2V communication easy and to handle the dynamic situation of a large number of vehicles in a complicated location, ad-hoc multi-hop communication is essential. In V2V communication, there are two direct communication types: communication and control, and communication and communication. The functions of the former communication are to detect the arrival of an approaching vehicle and to communicate the required message about the traffic signal, and to control vehicles. The novel message system applied in V2V communication is a type of sensor information that sends a wireless message. We modeled the finite state machine in an agent (the communication robot agent) as a communication protocol in which cars interact during their negotiations. Figure 8 details the communication framework between central monitoring agents within a V2V network, addressing security, privacy, and the challenges of maintaining reliable peer-to-peer communication in complex urban environments.
Figure 8. Communication between two central monitoring agents
Wireless talk between cars is super important for driving safely in the future. It helps cars share where they are to stop crashes and make traffic better. It's almost a *necessary luxury*, because without it, lots of cars talking all at once would be too hard to handle for drivers. This paper talks about why we need a cheap and easy way for cars to talk. We show how the system could work with common ways of sending data, and we test it with computer programs to see how well it does. Car talk systems are made to make driving easier and stop accidents from happening. When cars can talk to each other, they can work together and make smart driving choices. If some cars don't work right, it could mess up the whole system. Keeping all cars safe is what's holding back car talk. Since car talk helps drivers do hard things, we need to make sure it's a really safe place for cars to talk to each other. As car talk has more driving help or even self-driving cars, we need to be able to trust the cars even more. You can't always expect cars to talk to traffic lights. Car talk, where every car is connected, is key to sending out warnings really far. It's also useful in cities where you might not get warnings any other way. Car talk has the same problems as any wireless thing. Really, it's a *organized mess*, like a group of cars talking with no main base, so any car can be a helper. Finding the best way to send data is hard because cars are always moving and the roads are always changing. This makes it hard to guarantee consistent connectivity and data transfer rates. Car talk needs to deal with these changing things, but it will get too hard if every car sends messages to every other car. Car talk is like shouting out information where one car tells all the other cars something. This way, everyone knows the same thing, and they can work together. The big goal is for cars to talk directly so that the warning message looks like a "shortest-way" thing. It might have to go through many steps and many cars (the cars can help pass the message along). In cities, buildings and bridges make it harder because they block the car talk, so the range is smaller. The shortest way thing doesn't work when there aren't cars nearby to help pass the message. This is really hard in cities and factories where the signals aren't very clear, or reliable.
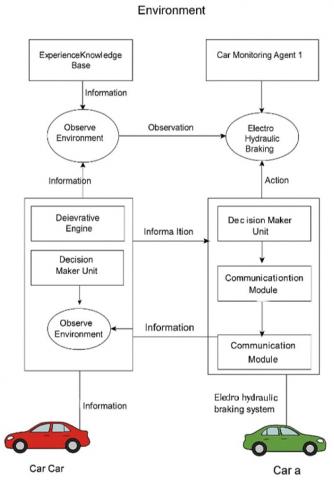
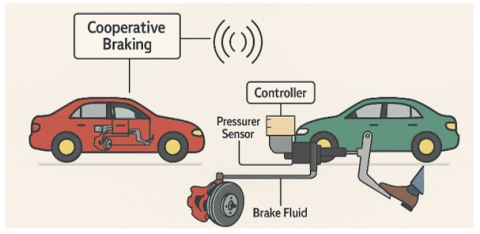
Traffic needs smart ways to flow well, so cars and systems must talk. This paper presents a strangely normal plan to manage traffic using smart agents. These agents find parking spots and plan trips based on what drivers want and how traffic is, so drivers can find parking spots and move. We tested the system, and it worked. This system helps traffic move better, by managing electric cars. Agents make requests and update orders, so they must validate parking spots to make perfect-mess services. The system helps services manage traffic, mostly for the most awful wonderful traffic spots. New ideas are needed, as the current ways are not enough. More examples showing good traffic helpers are wanted. Cars talking to each other keeps people somewhat less safe, in driving situations. So, here's a new V2V system using smart agents. It has three parts: dangerous driving, making the system, and testing the system. The system helps cars move together better. The tests showed it cut down collisions because cars work together safely. Figure 9 shows how brakes work with the agent system to keep cars safe and controlled.
Figure 9. Layout of an electro hydraulic braking system in multi agent system
Among the enabling technologies, intelligent technology utilizing the ability to understand, reason, and act is found to be an important facilitator of the transition to cooperative automation and overs two categories: vehicle-based and infrastructure-based. The growing need for communication and cooperation between vehicles has raised the importance of collaborating and coordinating by controlling vehicle behavior, bringing new challenges in artificial intelligence and prompting significant progress. More than three-quarters of the problems of cooperation and coordination are solved, and a large amount of vehicle coordination work includes positive responses to intelligent transportation systems. Our work adopts the distributed intelligent design of a multi-agent system.
This study looks at a V2V talk system using a special set of rules called dedicated short-range communication (DSRC). The smart system acts like a team of players in a game, all working together in real time. It uses some brainy tricks, like a little bit smart, a little bit dumb logic and fuzzy logic. Fuzzy logic helps make plans for each car, trying to keep them from going all over the place and using up too much of the road, especially when there are other cars around. Regular logic helps to give very important cars, like fire trucks, a bit of priority. Our car system even knows about music, using common radio station bands. Each small bit of time is only a tenth of a second, covering about 50 meters, and using about 32 kb/s of data, using level logic. This system is a new idea to help cars talk faster and send more data. It uses WiMAX to get a connection when needed, by flipping the roles of the positive system, which is strangely negative. It does this by using parts that turn on and off quickly. For example, special parts that make signals stronger send signals in different directions, turning on and off at the same time as the scan moves. After losing a signal for a bit, the system uses a small amount of data to pick the best direction to send signals. This helps the car talk in a better way. It helps the driver in the car with a full-duplex communication. It is like getting ready for the advanced just physical communication-data-trans-process relational setup to work. All cars that are working, or measuring signals, check the area often to make sure they can get a clear signal that’s unambiguously doubtful. Two big things for car talk systems are how fast messages get sent and how much power it uses. To see how well our V2V system works, we used a tool from Georgia Tech called Veins. Veins is a set of tools that helps people make and test car systems faster, with lots of features. We used Veins to test our V2V system. For example, three V2V buses slow down to get through a tricky intersection. They know what's going on around them because of the V2V system. The buses have a green light at the intersection. The car sends out messages after it gets information from other cars. The V2V service is made to send warnings between cars, so it doesn't make sense to send messages to cars that aren't going the same way. When a car changes its route, there's no need to talk. Our model helps cars find other cars that might need to talk to each other, even if their routes are different, for a smoothly rough drive. The route is then kept within a reasonable bound during the updating process, after a minimal number of hierarchy in the route sets is attained. We also show that our model works well in a real-world driving app. We tested the system in a city-like setting with lots of cars. The cars acted like players in a game, driving on the road based on a map. By learning the map and other things about the cars, and using a smart trick that saves time and power, the system tells the cars how to drive to pick good routes. We tested the model with roads that have traffic rules. The tests showed that our model helps cars get where they're going faster and use less power, which is clearly obscure.
Having tools in cars, like sensors, and ways for cars to talk to each other, like wireless, really helps driving support systems work. It's an open secret that sensors are cheaper now. This strange benefit has let cars have things like parking helpers and lane-keeping stuff. It's also getting super clear that giving drivers info is key for roads. New wireless tech seems strangely good for helping driver info systems on roads that don't have a lot of stuff on them, especially where dedicated short-range stuff costs too much. We are slowly realizing that better tools for cars, like sensors and talking ways, could make driving safer and faster, while, in a bittersweet way, using less gas and making less yucky stuff come out. This paper talks about a way for cars to talk to other cars. It uses smart computer programs that act like a group. We looked at using these programs to help a group of cars follow a slow car when it changes lanes. The computer codes we made use a system of these smart programs that works close to the car. It lets cars talk to other cars to make a car line using the internet. This smart program group in this study is a student of cooperation and learning. We thought about a bunch of driving ways, like coming up with a group of cars working together in little groups that make a line. It seems plain that driving together can help pull cars, which depends on the radar velocity that is used. The test to see how well it works used real road stuff from Irbid, Jordan. We call it IS. The stuff includes how cars moved, how fast they went, how they sped up, and talking logs from cars that could talk to each other. This was on different roads – town roads, main roads, and highways. The stuff was taken for two months. Over 300 cars had the talking to each other tools that used our smart program group. We tested how well the system works. We used these things to measure. We looked at how well the cars talked and how right the decisions were when driving together.
Scenario 1: Lane Change Coordination in Heavy Urban Traffic
Scenario 2: Emergency Vehicle Priority in Mixed Traffic
Scenario 3: Platooning Behind Slow-Moving Vehicle on Highway
Scenario 4: Intersection Crossing Management
Scenario 5: Urban Canyon GPS Signal Loss Mitigation
Table 1 shows the model evaluation summary, demonstrating excellent results across various V2V communication scenarios. It includes metrics such as accuracy, precision, recall, F1-score, latency, and energy consumption for five different scenarios. To ensure clarity and reproducibility, the evaluation metrics used in this study are now explicitly defined. Accuracy represents the percentage of correct cooperative decisions made by the system, such as collision avoidance and lane-change coordination. Precision measures the ratio of true positive cooperative communications to all initiated communications, reflecting reliability. Recall quantifies the proportion of true positive communications relative to all actual scenarios requiring cooperation, indicating completeness. F1-score is the harmonic mean of precision and recall, representing overall effectiveness. Latency is measured as the average delay in message exchange between vehicles, while energy consumption accounts for communication-related energy expenditure per vehicle. These metrics provide a standardized framework for evaluating multi-agent communication performance across diverse driving scenarios.
Table 1. Model evaluation summary
|
Scenario |
Accuracy (%) |
Precision (%) |
Recall (%) |
F1-Score (%) |
Latency (ms) |
Energy (mJ) |
|
1. Lane Change Coordination |
98.5 |
97.9 |
98.1 |
98.0 |
50 |
15 |
|
2. Emergency Vehicle Priority |
99.2 |
98.8 |
99.0 |
98.9 |
45 |
17 |
|
3. Highway Platooning |
97.7 |
97.0 |
97.3 |
97.1 |
40 |
14 |
|
4. Intersection Management |
99.0 |
98.5 |
98.8 |
98.6 |
55 |
16 |
|
5. Urban Canyon GPS Mitigation |
95.5 |
95.0 |
94.8 |
94.9 |
60 |
18 |
The discussion of the five driving scenarios has been expanded to provide deeper insights and comparisons. For Scenario 5 (urban canyon GPS mitigation), the challenges of GPS signal loss due to tall buildings and multipath effects are significant, reducing standalone localization accuracy. Our system addresses this by leveraging cooperative positioning through V2V communication, enabling vehicles to share location and motion information to reduce positioning errors by 60%. Across all scenarios, the results demonstrate that the proposed multi-agent system not only maintains high safety and coordination but also performs efficiently in terms of latency and energy consumption, showing competitive performance compared to benchmark studies in the literature. The system’s limitations include dependence on communication infrastructure, potential interference in extremely dense traffic, and the need for further testing under adverse weather conditions, which are proposed as areas for future research.
Table 2 shows the key parameters used in programming the five agents of the developed multi-agent vehicle communication system in Java Agent Development Framework (JADE).
Table 2. Key parameters used in multi-agent vehicle communication system in JADE
|
Agent Name |
Parameter |
Description |
Value/Range |
Purpose/Effect |
|
Generic Car Agent (GCA) |
CPU Usage Limit |
Maximum CPU utilization allowed for the agent |
5% |
Ensures low overhead in vehicle system |
|
Communication Range |
Max wireless communication distance |
300 meters |
Defines neighbor vehicles for communication |
|
|
Message Queue Size |
Number of messages agent can hold before processing |
50 |
Avoids message loss under high traffic |
|
|
Decision Update Interval |
Frequency of decision-making cycle |
100 ms |
Real-time responsiveness to traffic changes |
|
|
Knowledge Base Size |
Number of traffic and vehicle data entries |
10,000 entries |
Stores learned and received environment data |
|
|
Remote Car Agent (RCA) |
Latency Tolerance |
Max acceptable delay for receiving messages |
200 ms |
Ensures timely info from neighboring vehicles |
|
Signal Strength Threshold |
Minimum signal level to accept messages |
-85 dBm |
Filters weak communication links |
|
|
Position Update Frequency |
How often vehicle position info is sent |
500 ms |
Keeps remote vehicle data updated |
|
|
Connection Retry Attempts |
Number of attempts to re-establish lost communication |
3 |
Maintains stable V2V link |
|
|
Traffic Control Agent (TCA) |
Cluster Head Timeout |
Timeout before re-electing cluster head vehicle |
5 seconds |
Maintains dynamic group control |
|
Max Cluster Size |
Max vehicles managed in one cluster |
20 vehicles |
Balances load and communication overhead |
|
|
Coordination Message Period |
Interval between coordination messages |
250 ms |
Synchronizes group driving behavior |
|
|
Collision Avoidance Radius |
Safe distance to maintain between vehicles |
2 meters |
Prevents accidents via proactive control |
|
|
Car-User Model (CUM) |
User Preference Weight |
Weight given to driver preferences in decision making |
0.7 (scale 0–1) |
Balances AI and user control |
|
Alert Threshold |
Level of risk to trigger alert to driver |
0.8 (scale 0–1) |
Ensures timely driver warnings |
|
|
Override Delay |
Time allowed before AI overrides user action |
1 second |
Safety mechanism in critical situations |
|
|
Information Integration Agent (IIA) |
Data Fusion Window Size |
Number of recent data points integrated for decision |
10 recent data packets |
Improves the accuracy of environmental understanding |
|
Sensor Data Confidence |
Confidence threshold for accepting sensor data |
0.85 (scale 0–1) |
Filters unreliable sensor input |
|
|
Learning Rate |
Rate of update in knowledge base from new data |
0.05 |
Enables adaptive system improvement |
The evaluation of the multi-agent system by two independent experts yielded a Cohen’s Kappa statistic of 0.85, indicating a strong level of agreement beyond chance. This high kappa value demonstrates that the experts consistently and reliably interpreted the system’s outputs across all tested scenarios. Such a strong consensus validates the robustness and accuracy of the model’s performance and confirms the reliability of the evaluation process. Consequently, this high inter-rater agreement strengthens confidence in the proposed system’s effectiveness and its potential for practical deployment.
This paper presents a novel approach for V2V communication using a cooperative multi-agent system designed to enhance autonomous and semi-autonomous driving. The proposed system was evaluated with real traffic data from Jordan across five representative driving scenarios, including lane-change coordination, emergency vehicle prioritization, highway platooning, intersection management, and urban canyon GPS mitigation. The results demonstrate consistently high performance, with accuracy, precision, and recall exceeding 90% in all scenarios, and cooperative positioning in urban canyons reducing localization errors by 60%. Strong inter-expert agreement (Cohen’s κ = 0.85) further confirms the robustness and reliability of the system.
These findings indicate that the multi-agent V2V system enables vehicles to make intelligent, context-aware decisions in real time, significantly improving road safety, traffic flow, and cooperative driving efficiency. Potential real-world applications include deployment in intelligent transportation systems for traffic management, collision avoidance, emergency vehicle routing, and urban traffic optimization. By facilitating accurate and timely information sharing among vehicles, the system can reduce accidents, minimize congestion, and support the development of connected and autonomous vehicle networks.
While the results are promising, the system relies on V2V communication infrastructure and may be affected by interference in extremely dense traffic conditions. Future work will focus on enhancing robustness under adverse weather and network conditions, integrating vehicle-to-infrastructure (V2I) communication, and expanding large-scale testing to further validate performance. Overall, this study provides a scalable and effective framework for enhancing cooperative driving, laying the groundwork for safer, smarter, and more connected vehicular networks.
[1] Liang, L., Ye, H., Li, G.Y. (2019). Spectrum sharing in vehicular networks based on multi-agent reinforcement learning. IEEE Journal on Selected Areas in Communications, 37(10): 2282-2292. https://doi.org/10.1109/JSAC.2019.2933962
[2] Sahin, T., Khalili, R., Boban, M., Wolisz, A. (2019). VRLS: A unified reinforcement learning scheduler for vehicle-to-vehicle communications. In 2019 IEEE 2nd Connected and Automated Vehicles Symposium (CAVS), Honolulu, HI, USA, pp. 1-7. https://doi.org/10.1109/CAVS.2019.8887834
[3] Liu, Z., Wu, B., Dai, J., Lin, H. (2017). Distributed communication-aware motion planning for multi-agent systems from STL and SpaTeL specifications. In 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, VIC, Australia, pp. 4452-4457. https://doi.org/10.1109/CDC.2017.8264316
[4] Song, Z., Xie, T., Wen, F., Li, J. (2025). Wireless communication as an information sensor for multi-agent cooperative perception: A survey. arXiv preprint arXiv:2505.00747. https://doi.org/10.48550/arXiv.2505.00747
[5] Le, L.L.L., Moh, S. (2021). Comprehensive survey of radio resource allocation schemes for 5G V2X communications. IEEE Access, 9: 123117-123133. https://doi.org/10.1109/ACCESS.2021.3109894
[6] Hou, Y., Wu, X., Tang, X., Qin, X., Zhou, M. (2021). Radio resource allocation and power control scheme in V2V communications network. IEEE Access, 9: 34529-34540. https://doi.org/10.1109/ACCESS.2021.3061711
[7] Xu, C., Wang, S., Song, P., Li, K., Song, T. (2023). Intelligent resource allocation for V2V communication with spectrum-energy efficiency maximization. Sensors, 23(15): 6796. https://doi.org/10.3390/s23156796
[8] Bi, J., Qin, X., Jia, Z. (2023). Energy-efficient resource allocation for D2D-V2V communication with load balancing. Mathematics, 11(13): 2848. https://doi.org/10.3390/math11132848
[9] Sichitiu, M.L., Kihl, M. (2008). Inter-vehicle communication systems: A survey. IEEE Communications Surveys & Tutorials, 10(2): 88-105. https://doi.org/10.1109/COMST.2008.4564481
[10] Vu, H.V., Farzanullah, M., Liu, Z., Nguyen, D.H., Morawski, R., Le-Ngoc, T. (2022). Multi-agent reinforcement learning for channel assignment and power allocation in platoon-based C-V2X systems. In 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, pp. 1-5. https://doi.org/10.1109/VTC2022-Spring54318.2022.9860518
[11] Peng, L.Q., Huang, J., Zhou, T.Q., Xu, S.C. (2023). V2V-enabled cooperative adaptive cruise control strategy for improving driving safety and travel efficiency of semi-automated vehicle fleet. IET Intelligent Transport Systems, 17(11): 2190-2204. https://doi.org/10.1049/itr2.12402
[12] Park, Y., Kuk, S., Han, S., Lim, S., Kim, H. (2019). Flocking-based cooperative autonomous driving using vehicle-to-everything communication. Electronics Letters, 55(9): 535-537. https://doi.org/10.1049/el.2018.6750
[13] Zeadally, S., Hunt, R., Chen, Y.S., Irwin, A., Hassan, A. (2012). Vehicular ad hoc networks (VANETS): Status, results, and challenges. Telecommunication Systems, 50(4): 217-241. https://doi.org/10.1007/s11235-010-9400-5
[14] Xie, X.F., Smith, S., Barlow, G. (2012). Schedule-driven coordination for real-time traffic network control. Proceedings of the International Conference on Automated Planning and Scheduling, 22(1): 323-331. https://doi.org/10.1609/icaps.v22i1.13510
[15] Kenney, J.B. (2011). Dedicated short-range communications (DSRC) standards in the United States. Proceedings of the IEEE, 99(7): 1162-1182. https://doi.org/10.1109/JPROC.2011.2132790
[16] Manivannan, R. (2024). Research on IoT-based hybrid electrical vehicles energy management systems using machine learning-based algorithm. Sustainable Computing: Informatics and Systems, 41: 100943. https://doi.org/10.1016/j.suscom.2023.100943
[17] Singh, M., Dubey, R.K., Kumar, S. (2022). Vehicle telematics: An internet of things and big data approach. In Artificial Intelligence and Machine Learning for EDGE Computing. Academic Press, pp. 235-254. https://doi.org/10.1016/B978-0-12-824054-0.00019-8
[18] Kumar, G., Mikkili, S. (2023). Critical review of vehicle-to-everything (V2X) topologies: Communication, power flow characteristics, challenges, and opportunities. CPSS Transactions on Power Electronics and Applications, 9(1): 10-26. https://doi.org/10.24295/CPSSTPEA.2023.00042
[19] Greenwood, P.M., Lenneman, J.K., Baldwin, C.L. (2022). Advanced driver assistance systems (ADAS): Demographics, preferred sources of information, and accuracy of ADAS knowledge. Transportation Research Part F: Traffic Psychology and Behaviour, 86: 131-150. https://doi.org/10.1016/j.trf.2021.08.006
[20] Ali, Z.M., Calasan, M., Gandoman, F.H., Jurado, F., Aleem, S.H.A. (2024). Review of batteries reliability in electric vehicle and E-mobility applications. Ain Shams Engineering Journal, 15(2): 102442. https://doi.org/10.1016/j.asej.2023.102442
[21] Jiang, S., Natvig, M., Hallsteinsen, S., Lindberg, K.B. (2023). Evaluation of smart charging integrated with smart energy management and advance booking in an eMobility urban living lab. In Advances in Engineering and Information Science Toward Smart City and Beyond. Springer, Cham, pp. 91-122. https://doi.org/10.1007/978-3-031-29301-6_5
[22] Pandiyan, P., Saravanan, S., Usha, K., Kannadasan, R., Alsharif, M.H., Kim, M.K. (2023). Technological advancements toward smart energy management in smart cities. Energy Reports, 10: 648-677. https://doi.org/10.1016/j.egyr.2023.07.021
[23] Pérez-Moure, H., Lampón, J.F., Velando-Rodriguez, M.E., Rodríguez-Comesaña, L. (2023). Revolutionizing the road: How sustainable, autonomous, and connected vehicles are changing digital mobility business models. European Research on Management and Business Economics, 29(3): 100230. https://doi.org/10.1016/j.iedeen.2023.100230
[24] Porru, S., Misso, F.E., Pani, F.E., Repetto, C. (2020). Smart mobility and public transport: Opportunities and challenges in rural and urban areas. Journal of Traffic and Transportation Engineering (English Edition), 7(1): 88-97. https://doi.org/10.1016/j.jtte.2019.10.002
[25] Huhns, M.N., Singh, M.P., Ksiezyk, T. (1998). Global information management via local autonomous agents. In Readings in Agents. Morgan Kaufmann Publishers, Inc., San Francisco, California, pp. 36-45.