Ziyad M.T. Salleh![]() | Ahmed Nasser B. Alsammak*
| Ahmed Nasser B. Alsammak*![]() | Hasan A. Mohammed
| Hasan A. Mohammed![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Running power systems near their maximum operating limits can cause instability if a disturbance occurs. Conventional procedures can dampen the system's oscillations, such as speed and voltage regulation of generator units, or by using a flexible AC transmission system (FACTS) device. These devices are extensively utilized in power systems. In this paper, the transient stability of the power system has been enhanced by the proposed static var compensator (SVC) based on a fuzzy logic controller (FLC) compared with the conventional SVC based on a Proportional Integral (PI) controller. Six distinct categories of failures were examined. The proposed FLC responses were compared with the conventional PI controller regarding the difference in rotor angle between machines, the transmission line active power, synchronous machines speeds and terminal voltages variation, thyristor switched capacitor (TSC) response, reactive power, and thyristor controller reactor (TCR) response. MATLAB-Simulink evaluated the proposed SVC based on an FLC on a two-machine, 3-bus power system. The simulation result showed the superiority of the SVC based on an FLC over the conventional SVC based on a PI controller. The maximum overshoot improved by 11.94%, and the settling time improved by 9.47%. In addition, it is noted that the proposed FLC contributes to compensating about 16.2% of the system's equivalent kinetic energy.
power system stability, transient stability, SVC, fuzzy logic controller, rotor angle stability
The electrical power system is a complicated network that includes several generators, transmission lines, various loads, and transformers. Many transmission lines are overloaded due to increased electricity consumption. As the load on lengthy transmission lines increases, the issue of transient stability following a severe fault may become a limiting factor for transmission capacity [1]. Consequently, transient stability research has come to be acknowledged as a crucial component of electrical system design to guarantee that the system functions appropriately and resumes its normal or stable state following any severe disturbances [2]. The ability of a power system to keep operating balance or synchronism in the face of system disturbance is known as power system stability [3].
Financial constraints may prevent expanding the network and building new transmission lines to meet the growing electricity demand. To guarantee quick control and adaptable system functioning, it is necessary to search for an effective and affordable solution [4]; as a result, serious consideration has been given to the usage of FACTS technology that is powered by modern power electronics equipment [5].
Power transfer capacity, stability, and controllability are all improved by the FACTS family of power electronic components. Thyristors, transistors, reactors, transformers, switches, and capacitors are combined power system components in these devices. The FACTS devices improve the dynamic and transient abilities of the power system [6]. Voltage stability, transmission capacity, controllability, and transient stability are all enhanced in FACTS devices by using electronic-based switches [7].
The SVC is a very often used form of FACTS devices in terms of applications. It is commonly recognized that this device enhances power system characteristics such as voltage regulation, damping power system oscillations, steady state stability limitations, and transient stability [8].
Several researchers conducted experiments on improving the transient stability of the power system using different technologies and various control units. Dahat and Dhabale [9] coordinated control of SVC and Static Synchronous Series Compensator (SSSC), which was proposed to improve system stability. The effects of SVC and SSSC, both individually and in combination, on rotor angle stability, have been investigated. The findings revealed that when SSSC and SVC controllers are used together in a coordinated manner, they significantly enhance system stability, enabling the system to recover more rapidly following a disturbance. Movahdi et al. [10] investigated the stability improvement of power systems using PI controllers, Power System Stabilizer (PSS), and FACTS-based stabilizers, with a focus on coordinated application through eigenvalue analysis and nonlinear time-domain simulations, The results obtained indicate that SSSC and PI controllers are the most reliable and effective methods for enhancing the stability of wind and PV farms. The enhancement of transient stability for two machine systems was studied with the use of a PI controller combined with Fuzzy, and the result obtained showed that the proposed controller provides good performance compared with PI [11]. Shafiee et al. [12] improved Applied a methodology that combined a Fractional-order Promotional-Integral-Derivative (FOPID) control strategy with fuzzy logic in a multi-machine interconnected system equipped with (SSSCs), compared with other popular controller strategies the proposed controller achieved a significant performance in terms of settling time, overshoot and undershoot. Kumar and Rammohan [13] examined the improvement in transient stability of power systems with multi-machine using Static Synchronous Compensator (STATCOM), the result obtained showed that the power oscillation can be damped efficiently when STACOM is connected to the transmission line. The energy storage systems used are SVC and photo-voltaic generators (PVG) in a 3-machine 9-bus power system and their ability to enhance transient stability has been investigated, the more effective weakest bus has been selected from the result obtained to add an energy storage system to get the higher improvement in transient stability [14].
Compared to prior studies, this work improved the system's transient stability when subjected to all types of faults. Furthermore, when the system is exposed to a sudden increase in load. Unlike prior research that only improved stability for specific faults, this improvement is due to a proposed SVC based on an FLC that depends on both error and error signal change.
This work examines improving the power system's transient stability using an SVC based on an FLC. The system with the proposed controller is modeled in MATLAB-Simulink and uses three buses, two generators, and an SVC based on an FLC. The system's performance using the conventional SVC based on a PI controller and the system using the SVC based on an FLC are compared.
2.1 Static Var compensator (SVC)
Within the family of FACTs, the SVC is a shunt device utilizing power electronics to regulate power flow, maintain voltage [15], and increase transient stability in the power network [16]. The SVC is managed by the shunt susceptance (B), which injects or absorbs reactive power (Q) from the power system to control the system voltage. Reactive power (Q) is generated by the SVC when the voltage is low and absorbed when the voltage is high [17]. Reactive power varies as a result of changes to the capacitor and inductor bank that are connected to the coupling transformer's secondary side. Altering the banks of capacitors and inductors helps regulate the fluctuations in reactive power [18]. A thyristor-switched capacitor (TSC) turns on and off the capacitor bank, while a thyristor-controlled reactor (TCR) turns on and off the reactor [19].
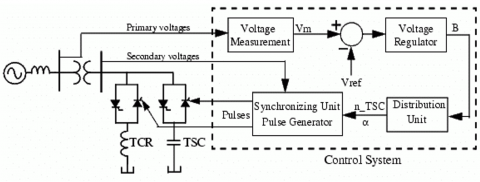
A diagram of the SVC's architecture and how it integrates into a power system is illustrated in Figure 1. Phase-locked loops (PLLs) are used in SVC architecture to synchronize with the secondary voltage. Other components include a voltage regulator and a step-down transformer for determining susceptance (B), TSC units, and TCR units [20]. The elements of the SVC-control system block diagram are [21, 22]:
(1) Measurement voltage determines the voltage that needs to be regulated.
(2) Voltage regulator unit that measures the SVC susceptance required to maintain the system voltage at the specified level using the voltage error which is the difference between (Vm) and (Vref).
(3) The distribution unit computes the TCR and the TSC firing angle that needs to be turned on and off.
(4) A synchronizing unit with a pulse generator and phase-locked loops is synchronized on the secondary side voltages, which provide sufficient pulses to the thyristors.
Figure 1. SVC-control system block diagram
2.2 Fuzzy logic controller for SVC
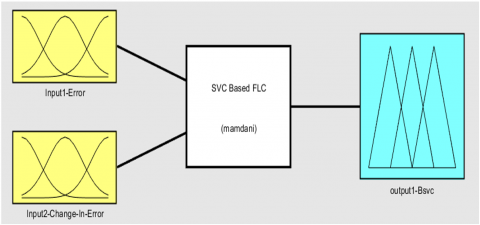
Fuzzy controllers have handled hard real industrial problems, and this form of regulation has been widely applied in FACTS devices [23]. It may be employed to establish control laws. Fuzzy logic allows for the formalization of uncertainty resulting from a worldwide comprehensive understanding of a complicated nonlinear system. This technique consists of three fundamental steps: fuzzification, the elaboration of the inference rules, and defuzzification [24]. Mamdani and Takagi-Sugeno are the two forms of FLC, the Mamdani type is most suitable for hardware implementation and is most frequently utilized in engineering systems [25]. The Mamdan type is employed in this work, and the main objective is to replace the PI controller with an FLC to determine susceptance B in the static var compensator device and enhance the transient stability of the power system. Figure 2 shows the schematic diagram of the proposed SVC based on an FLC.
Figure 2. Controller diagram of the proposed SVC based FLC
2.2.1 Fuzzification
The input stage that enables the transformation of variables from the real domain into a fuzzy domain is called "fuzzification" [26]. The input variable of the controller is converted into linguistic variables through the membership function [27]. The SVC based on an FLC, in the current study, has two inputs and one output, as shown in Figure 3. The error and its change (change in error) signals between the reference voltage and the measured voltage were selected as the input variables for the FLC, and the susceptance (B) signal is chosen as the output signal of the fuzzy circuit.
Figure 3. Fuzzy logic architecture for SVC based FLC
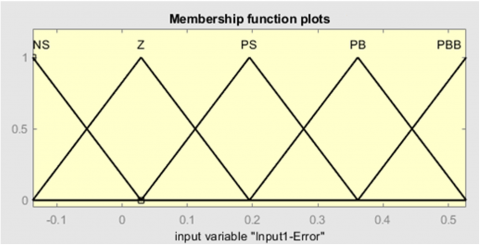
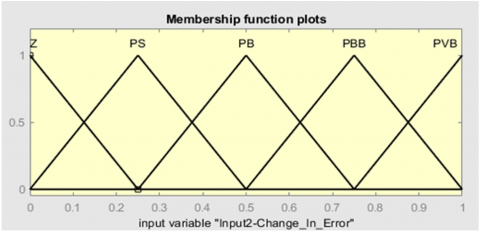
By partitioning the universe of dialogue for each linguistic variable into intervals, these variables (input/output) are fuzzified. The discretization process can ascertain every variable's fuzzy sets and memberships function [28]. The fuzzification of the inputs membership functions of the error and change in error are shown in Figures 4 and 5.
Figure 4. The fuzzification input membership function of the error
Figure 5. The fuzzification input membership function of the change in error
2.2.2 Rule-based system and inference
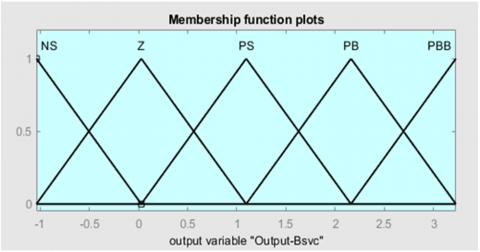
The fuzzy rules are defined through simulation and real-world experience to improve system performance. Mamdani's fuzzy inference approach, proposed with twenty-five rules, was used in this processing stage. Table 1 clears the set of rules in a tabular language manner, and Figure 6 displays the membership function for output (B). The following facts are considered for generating rules that cover every possible situation.
1) For the small value of error and change in error, a small value of B is required.
2) A large value of B is required for a large error value and change in error.
The linguistic variable for each input and output variable, namely, “Positive Very Big”(PVB), “Positive Big Big”(PBB), “Positive Big”(PB), “Positive Small”(PS), “Zero”(Z), and “Negative Small”(NS).
Table 1. Rule-based (Uses fuzzy rules for control)
|
Output-Bsvc |
Error |
|||||
|
NS |
Z |
PS |
PB |
PBB |
||
|
Change in Error |
Z |
Z |
PS |
PS |
PB |
PB |
|
PS |
PS |
PS |
PB |
PB |
PBB |
|
|
PB |
PS |
PB |
PB |
PBB |
PBB |
|
|
PBB |
PB |
PB |
PBB |
PBB |
PBB |
|
|
PVB |
PB |
PBB |
PBB |
PBB |
PBB |
|
Figure 6. The membership function for output (B)
2.2.3 Defuzzification
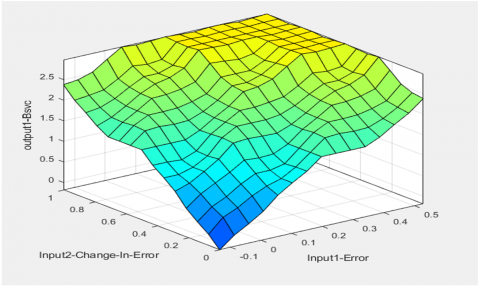
Defuzzification is a Fuzzy Inference System (FIS) process that transforms the fuzzy output into a crisp output. The defuzzification technique transforms the fuzzy rule output into a non-fuzzy numerical output. This stage creates the FLC's final, crisp output based on the fuzzy input. The final stage is defuzzification, which requires converting the resulting fuzzy susceptance (B) into a number. As a result, the process gains its true susceptibility. Figure 7 displays the fuzzy inference system output 3D surface.
Figure 7. 3D input-output mapping for the proposed fuzzy inference system
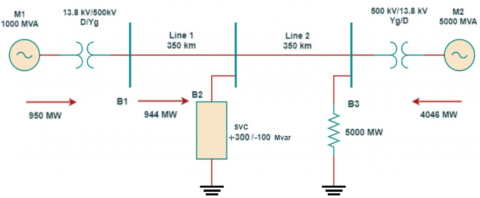
The proposed test power system with an SVC has the following characteristics, as depicted in the single-line diagram shown in Figure 8. However, this study used a detailed model of SVC controllers, thyristor-based static var compensators. Table 2 shows the specification built into the MATLAB model.
(1) Two synchronous machines and three buses.
(2) 13.8 kV/500 kV two power transformers.
(3) 500 kV and 700 km transmission line.
(4) +300 Mvar/-100 Mvar static var compensator.
(5) Two power system stabilizers and two automatic voltage regulators (AVR).
(6) 5000 MW purely resistive load.
Figure 8. Single line diagram of a 2-machine 3-bus system
Table 2. Specification for 3 bus 2 generator test system
|
Machine No. |
Specification |
Values |
|
Machine-1 |
Type |
PV bus |
|
Active Power |
950 MW |
|
|
Terminal Voltage |
13800 Vrms |
|
|
Machine-2 |
Type |
Swing bus |
|
Active Power |
4046 MW |
|
|
Terminal Voltage |
13800 Vrms |
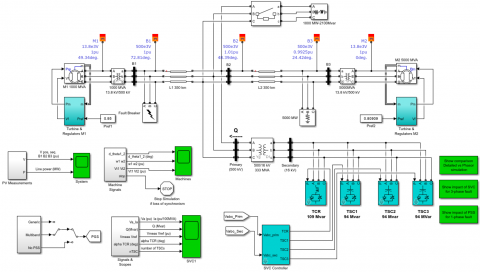
The MATLAB Simulink model of the test system is shown in Figure 9. A remote source (plant M1-1000MVA) and a local generating source (plant M2-5000 MVA) supply the 5000 MW resistive load represented as the load center. 950 MW and 4046 MW, respectively, are the production rates of M1 and M2. This system features a controlled load flow of 944 MW carried by the line, nearly its maximum impedance loading (SIL=977MW).
Figure 9. MATLAB-Simulink tested power system
The transmission line is compensated at its midpoint using an SVC, providing optimal voltage regulation and reactive power management, ensuring balanced compensation during both normal operation and disturbances. The SVC consists of one (109Mvar) thyristor controller reactor bank (TCR), three (94Mvar) thyristor switched capacitor banks (TSC1 TSC2 TSC3), and a 500kV/16kV 333MVA coupling transformer. The secondary reactive power may be continuously varied from zero to (282Mvar) capacitive (at 16kV side) in (94Mvar) steps by turning on and off the TSCs. At the same time, the TCR's phase control can continuously vary from zero to (109Mvar) inductive.
The simulation results produced on the 3-bus tested system with two machine power systems are presented and analyzed in this section. The fault is created close to synchronous machine 1 between Bus bar 1 and Bus bar 2 of the system shown in Figure 9; six fault cases are examined for the system: Single line to ground fault, double line ground fault, double line short circuit fault, three-line-to-ground fault, three line short circuit fault, and suddenly increasing load. These faults were implemented using a three phase fault block in the MATLAB Simulink package. The faults were applied to three different system scenarios. The first scenario is a system without SVC, the second scenario is the system with the typical SVC based on a PI controller, and the third scenario is the system with the proposed SVC based on an FLC.
In this paper, the results of a three-phase short circuit fault are presented in detail together with the necessary figures as a sample of the faults to which the system may be susceptible, and the results obtained for all types of faults are summarized in Table 3 and Table 4. To help explain the analysis, several graphs illustrating the system's behavior and performance in terms of the difference in rotor angle between machines, transmission line active power, synchronous machine speed variation, the terminal voltage of the synchronous machine, thyristor switched capacitor response, reactive power, and thyristor controller reactor response have been observed.
4.1 Three-line short circuit fault
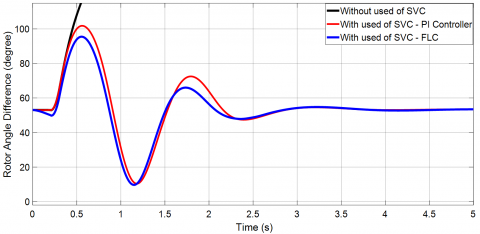
The system was subjected to a three-line short circuit fault, from t1=0.2s to t2=0.3s. The performance of the difference rotor angles of the two synchronous machines is shown in Figure 10. The results indicate that the system becomes unstable without an SVC device. The maximum difference of the rotor angle (maximum overshoot) of the system with the proposed SVC based on an FLC is 95.47º, while the maximum difference of rotor angle for the system with the SVC based on a PI controller is 101.8º, which means that the difference of rotor angle of the power system is enhanced by 11.94% in comparison with the system based on a PI controller. The rotor angle settling time is 2.03s for the power system with SVC based on an FLC compared to conventional SVC based on a PI controller; the settling time result is 2.13s, which means that the settling time is improved by 4.7%.
Figure 10. Difference in rotor angle between machines
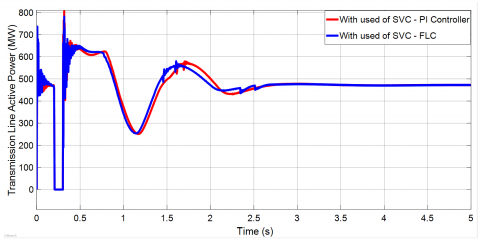
The transmission line's active power is another observed parameter, as illustrated in Figure 11. In the power system using an SVC based on an FLC, the line's active power exhibits reduced oscillations and achieves stability more quickly. The transmission line's active power experiences prolonged oscillations with an SVC using a PI controller, while the SVC with an FLC provides faster damping and stabilization. The FLC significantly reduces the oscillation amplitude, indicating better damping and less system stress. The power recovery is smoother with the FLC, enhancing overall system stability after fault clearance.
Figure 11. Active power of the transmission line
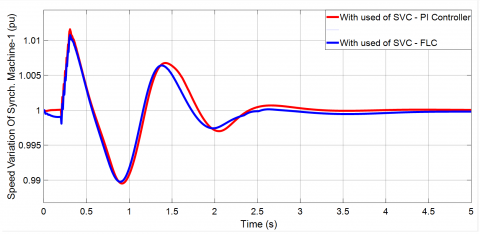
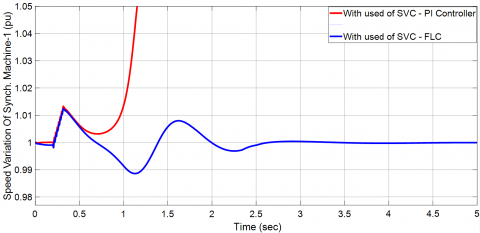
The speed of synchronous machine 1 has been observed, as shown in Figure 12. It is synchronized faster at t=1.7s with SVC based on an FLC than at t=1.8s with the conventional SVC based on a PI controller. This faster response with the FLC indicates superior performance in stabilizing machine speed after a fault, highlighting its enhanced ability to maintain system stability and improve dynamic performance.
Figure 12. Speed variation of synchronous machine 1
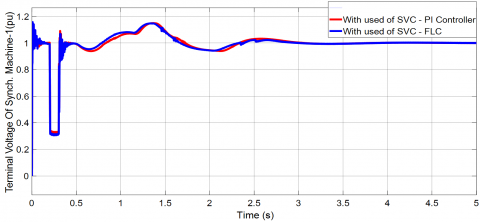
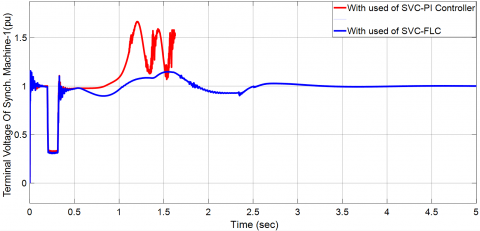
The fault between Bus bar 1 and Bus bar 2 also affected the terminal voltage; Figure 13 noted that the terminal voltage of synchronous machine 1 remains within the limit value of the reference value, and this factor is improved compared with the system based on a PI controller. Following the fault clearance at 0.3 seconds, the terminal voltage of synchronous machine 1 is increased to 1.09pu with SVC based on a PI controller. In contrast, with the use of SVC based on an FLC, the terminal voltage increased to 1.06pu, the FLC shows enhanced voltage regulation, minimizing deviations and maintaining the voltage closer to the desired reference value after fault clearance, further demonstrating its superior performance in stabilizing the system compared to the PI controller.
Figure 13. Terminal voltage synchronous machine 1
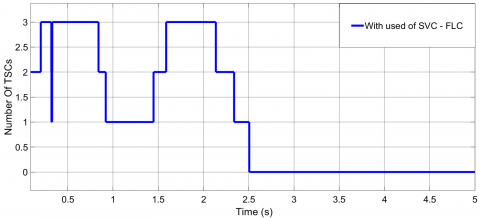
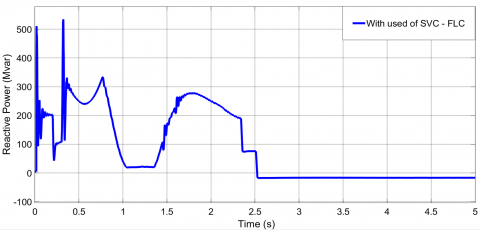
The static var compensator (SVC) operation has also been observed. Figure 14 shows the sequence of operations for the thyristor-switched capacitor (TSC). When a disturbance occurs and the system voltage drops, the SVC contributes by injecting reactive power to support the voltage levels as shown in Figure 15. Once the system stabilizes, the SVC doesn't suddenly switch off the TSC. Instead, it manages the TSC in a controlled, sequential manner. This means that the TSC is gradually disconnected from the system, ensuring that the voltage stability is maintained without causing further disturbances. It is observed that after the fault is cleared at 0.3 seconds, the reactive power injected by the SVC reaches a peak value of 300 Mvar. This peak indicates the SVC’s immediate response to the voltage drop. Following this, the reactive power decreases gradually as the system stabilizes, reflecting the controlled nature of the SVC based on an FLC.
Figure 14. Thyristor switched capacitor (TSC) response
Figure 15. SVC reactive power injection
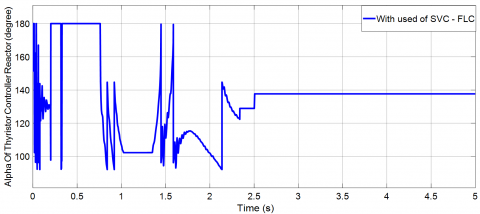
Upon detecting a disturbance that increases reactive power within the system, the SVC activates the Thyristor Controlled Reactor (TCR). This involves switching on the thyristors, which connect the reactor to the system and allow it to absorb excess reactive power. Figure 16 shows the TCR response, absorbing excess reactive power when needed and gradually reducing the absorption in a controlled manner. As observed from Figure 16 the TCR’s firing angle (alpha) reaches 92.2 degrees at 0.32 seconds, indicating that the TCR is absorbing the maximum amount of reactive power at this point to stabilize the system.
Figure 16. Thyristor controller reactor (TCR) response
Table 3 shows the percentage improvement in maximum rotor angle differences (maximum overshoot) for various types of faults. The results clearly show that using the proposed SVC based on an FLC improves the system's overall performance. The maximum rotor angle difference (maximum overshoot) decreases significantly when compared to the performance of a conventional SVC based on a PI controller. This reduction in maximum overshoot indicates a more stable and resilient power system, capable of better handling disturbances and maintaining stability under fault conditions.
Table 3. Overshoot of the difference in rotor angle
|
Fault Type |
SVC Based Controller |
Overshoot |
|
|
Max. (degree) |
Improvement (%) |
||
|
Single line to ground |
PI |
88 |
2.7 |
|
FLC |
86.58 |
||
|
Double-line short circuit |
PI |
89 |
9.43 |
|
FLC |
84 |
||
|
Double line to ground |
PI |
95 |
8.35 |
|
FLC |
90.57 |
||
|
Three-line short circuit |
PI |
101.8 |
11.94 |
|
FLC |
95.47 |
||
|
Three lines to ground |
PI |
103.23 |
11.54 |
|
FLC |
97.11 |
||
|
Suddenly increasing Load |
PI |
91.82 |
0.26 |
|
FLC |
91.68 |
||
In addition to reducing the maximum difference in rotor angle, the proposed SVC based on an FLC significantly improves the settling time of the difference in rotor angle. As shown in Table 4, the system stabilizes faster than a conventional SVC based on the utilization of a PI controller. The faster settling time shows that the power system can recover more quickly from disturbances, improving overall stability and dynamic response.
The superior performance of the proposed SVC based on an FLC compared to the conventional SVC using a PI controller is due to a key difference: the conventional PI-based SVC relies solely on the error signal. By depending only on this error signal, it fails to indicate how close or far the system is from the reference value, which may lead to the occurrence of some errors, oscillations, and slower response times. In contrast, the proposed SVC based on an FLC offers a fast and accurate response to all possibilities, as it relies on both the error signal and the change in error.
Table 4. Settling time of the difference in rotor angle
|
Fault Type |
SVC Based Controller |
Settling Time |
|
|
Time (s) |
Improvement (%) |
||
|
Single line to ground |
PI |
3.3 |
3 |
|
FLC |
3.2 |
||
|
Double-line short circuit |
PI |
2.07 |
9.17 |
|
FLC |
1.88 |
||
|
Double line to ground |
PI |
2.11 |
9.47 |
|
FLC |
1.91 |
||
|
Three-line short circuit |
PI |
2.13 |
4.7 |
|
FLC |
2.03 |
||
|
Three lines to ground |
PI |
2.15 |
3.72 |
|
FLC |
2.07 |
||
|
Suddenly increasing Load |
PI |
2.71 |
1.12 |
|
FLC |
2.68 |
||
4.2 System loses stability based on a PI controller
The power system implemented with an SVC based on a PI controller in Figure 9 loses its synchronism when the fault duration increases from 0.1s to 0.116s after being subjected to a three-line short circuit. In contrast, the system maintains synchronism when implemented with SVC based on an FLC. This is shown in Figure 17, where the speed of synchronous machine 1 continuously increases in the system with the SVC based on a PI controller. In contrast, the system remains within a limited value and stable with the proposed SVC based on an FLC after the fault is cleared. Additionally, the difference in rotor angles becomes unstable with SVC based on a PI controller, as shown in Figure 18, compared with the stable system using SVC based on an FLC after fault clearing. These results indicate that the proposed SVC based on an FLC significantly improves system damping and is more effective in enhancing system stability than the SVC based on a PI controller.
Figure 17. Speed variation of synchronous machine 1
Figure 18. Difference in rotor angle between machines
Figure 19. Terminal voltage of synchronous machine 1
The terminal voltage is also affected when the fault duration is increased, Figure 19 shows the increase of the terminal voltage of synchronous machine 1 from the reference value of the power system with SVC based on a PI controller, and remains within a limited value with SVC based on an FLC after fault clearing. This shows the superiority of the proposed SVC based on an FLC performance over the conventional SVC based on a PI controller in enhancing power system transient stability.
4.3 Effect of the kinetic energy on the transient stability
From the data characteristic of (plant M1 1000MVA) and (plant M2 5000MVA) the inertia coefficient (H) of M1 and M2 is 3.7 (MJ/MVA).
The total equivalent kinetic energy (KE) of the system is calculated as given in the following equations from (1) to (3):
KEeq.=KE1+KE2 (1)
KE1=H1 Sgn.1 (2)
KE2=H2 Sgn.2;KEeq=22200 MJ (3)
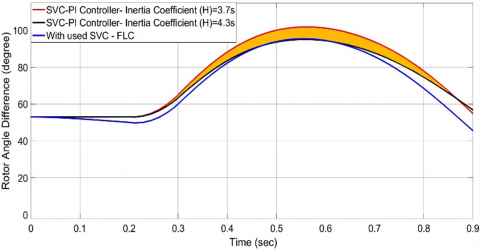
To match the performance of the system using an SVC based on a PI controller to that of the system with the proposed SVC based on an FLC as shown in Figure 20, the inertia coefficient of synchronous machines 1 and 2 was increased to 4.3 MJ/MVA in the system with the PI controlled, and the calculation of the total kinetic energy of the system become 25800 MJ. This analysis leads to the conclusion that the proposed SVC based on an FLC played a significant role in compensating of 3600 MJ of the equivalent kinetic energy within the power system. Additionally, it contributed an equivalent inertia coefficient of 0.72 MJ/MVA, further enhancing the stability and dynamic performance of the power system.
Figure 20. Rotor angle with used SVC based on a PI controller for two different values of inertia coefficient
This paper examines the dynamic behavior of a power system with two synchronous machines and SVC, for different types of faults. Many variables are monitored, including the difference in rotor angle between machines, the transmission line active power, synchronous machine speed variation, the terminal voltages, thyristor switched capacitor, reactive power, and thyristor controller reactor. These responses were used to study the performance of an SVC based on an FLC in enhancing the transient stability of the power system.
Since the proposed FLC depends on both error and change of error signals, it provides a faster and more accurate response than the conventional PI controller. Based on the simulation results, the proposed SVC based on an FLC performs better than the conventional system, where the maximum overshoot improved by 11.94% and the settling time improved by 4.7%. In addition, it is noted that the proposed FLC contributes to compensating about 16.2% of the equivalent kinetic energy within the power system during any sudden change.
The University of Mosul has been a significant source of support and assistance for the authors during this work, and they are greatly appreciated.
[1] Kumar, A., Dubey, S.B. (2013). Enhancement of transient stability in transmission line using SVC facts controller. International Journal of Recent Technology and Engineering (IJRTE), 2(2): 51.
[2] Al-Kaoaz, H.N.A., Alsammak, A.N.B. (2023). Utilizing hybrid renewable energy systems for enhancing transient stability in power grids: A comprehensive review. Journal Européen des Systèmes Automatisés, 56(4): 687-696. https://doi.org/10.18280/jesa.560418
[3] Hatziargyriou, N., Milanovic, J., Rahmann, C., Ajjarapu, V., Canizares, C., Erlich, I., Hill, D., Hiskens, I., Kamwa, I., Pal, B., et al. (2020). Definition and classification of power system stability-revisited & extended. IEEE Transactions on Power Systems, 36(4): 3271-3281. https://doi.org/10.1109/TPWRS.2020.3041774
[4] Ahmad, S., Albatsh, F.M., Mekhilef, S., Mokhlis, H. (2014). An approach to improve active power flow capability by using dynamic unified power flow controller. In 2014 IEEE Innovative Smart Grid Technologies-Asia (ISGT ASIA), pp. 249-254. https://doi.org/10.1109/ISGT-Asia.2014.6873798
[5] Jmii, H., Meddeb, A., Chebbi, S. (2016). A combination between FACTS devices for a safe and an economic power system operation. In 2016 4th International Conference on Control Engineering & Information Technology (CEIT), pp. 1-6. https://doi.org/10.1109/CEIT.2016.7929123
[6] Alhattab, A.S., Alsammak, A.N.B., Mohammed, H.A. (2023). An intelligent mitigation of disturbances in electrical power system using distribution static synchronous compensator. Indonesian Journal of Electrical Engineering and Computer Science, 30(2): 633-642. https://doi.org/10.11591/ijeecs.v30.i2.pp633-642
[7] Patil, B., Karajgi, S.B. (2017). A review on optimal placement of FACTS devices in deregulated environment-a detailed perspective. In 2017 International Conference on Electrical, Electronics, Communication, Computer, and Optimization Techniques (ICEECCOT), pp. 375-380. https://doi.org/10.1109/ICEECCOT.2017.8284532
[8] Keskes, S., Bahloul, W., Kammoun, M.B.A. (2014). Improvement of power system stability by static var compensator and tuning employing genetic algorithm. International Journal of Modern Nonlinear Theory and Application, 3(3): 113-123. https://doi.org/10.4236/ijmnta.2014.33013
[9] Dahat, S.A., Dhabale, A. (2023). Rotor angle stability improvement by coordinated control of SVC and SSSC controllers. Energy Reports, 9: 13-22. https://doi.org/10.1016/j.egyr.2023.05.050
[10] Movahedi, A., Niasar, A.H., Gharehpetian, G.B. (2019). Designing SSSC, TCSC, and STATCOM controllers using AVURPSO, GSA, and GA for transient stability improvement of a multi-machine power system with PV and wind farms. International Journal of Electrical Power & Energy Systems, 106: 455-466. https://doi.org/10.1016/j.ijepes.2018.10.019
[11] Hassan, M.M., Sun, X., Ate, A. (2020). FLC based on static var compensator for power system transient stability enhancement. Telecommunication Computing Electronics and Control, 18(5): 2665-2673. https://doi.org/10.12928/TELKOMNIKA.v18i5.15605
[12] Shafiee, M., Sajadinia, M., Zamani, A.A., Jafari, M. (2024). Enhancing the transient stability of interconnected power systems by designing an adaptive fuzzy-based fractional order PID controller. Energy Reports, 11: 394-411. https://doi.org/10.1016/j.egyr.2023.11.058
[13] Kumar, R.J., Rammohan, T. (2020). Enhancement of transient stability in power system with multi-machine using facts device. In 2020 IEEE International Conference on Advances and Developments in Electrical and Electronics Engineering (ICADEE), Coimbatore, India, pp. 1-7. https://doi.org/10.1109/ICADEE51157.2020.9368921
[14] Alsammak, A.N.B., Al-Nuaimy, A.A.M. (2008). Transient stability improvement of multi-machine power systems using modern energy storage systems. International Journal of Engineering and Innovative Technology, 7(1): 18-25.
[15] Qasim, A.Y., Tahir, F.R., Alsammak, A.N.B. (2021). Voltage sag, voltage swell and harmonics reduction using unified power quality conditioner (UPQC) under nonlinear loads. Iraqi Journal for Electrical & Electronic Engineering, 17(2): 140-150. https://doi.org/10.37917/ijeee.17.2.16
[16] Shelke, A.S., Bhole, A.A. (2021). A review on different FACTS devices used in electrical power system. International Journal of Engineering Research & Technology (IJERT), 10(4): 309-312.
[17] Udhayashankar, C., Thottungal, R., & Yuvaraj, M. (2014). Transient stability improvement in transmission system using SVC with Fuzzy Logic Control. In 2014 International Conference on Advances in Electrical Engineering (ICAEE), pp. 1-4. https://doi.org/10.1109/ICAEE.2014.6838505
[18] Chopade, P., Bikdash, M., Kateeb, I., Kelkar, A.D. (2011). Reactive power management and voltage control of large transmission system using SVC (Static VAR Compensator). In 2011 Proceedings of IEEE Southeastcon, Nashville, TN, USA, pp. 85-90. https://doi.org/10.1109/SECON.2011.5752911
[19] Ilisiu, D., Dinu, E.D. (2019). Modern reactive power compensation for smart electrical grids. In 2019 22nd International Conference on Control Systems and Computer Science (CSCS), pp. 353-357. https://doi.org/10.1109/CSCS.2019.00063
[20] Naeem, A., Atif, A. (2018). Transient stability of power system by static var compensator (SVC) and power system stabilizers (PSS) using MATLAB/Simulink. SSRG International Journal of Electrical and Electronics Engineering, 5(4): 16-20.
[21] Alkahdely, S.M.A., Alsammak, A.N.B. (2023). Normal operation and reverse action of on-load tap changing transformer with its effect on voltage stability. Bulletin of Electrical Engineering and Informatics, 12(2): 650-658. https://doi.org/10.11591/eei.v12i2.4556
[22] Mansour, I., Abdeslam, D.O., Wira, P., Mercklé, J. (2009). Fuzzy logic control of a SVC to improve the transient stability of ac power systems. In 2009 35th Annual Conference of IEEE Industrial Electronics, pp. 3240-3245. https://doi.org/10.1109/IECON.2009.5415212
[23] Hemeida, M.G., Hussien, H.R., Wahab, M.A. (2015). Stabilization of a wind farm using static VAR compensators (SVC) based fuzzy logic controller. Advances in Energy and Power, 3(2): 61-74. https://doi.org/10.13189/aep.2015.030204
[24] Alsammak, A.N.B., Al-Kaoaz, H.N.A. (2023). Design of a fuzzy distance relay taking into consideration the impact of using a unified power flow controller. Eastern-European Journal of Enterprise Technologies, 122(5): 6-19. https://doi.org/10.15587/1729-4061.2023.277343
[25] Tarbosh, Q.A., Aydoğdu, Ö., Farah, N., Talib, M.H.N., Salh, A., Cankaya, N., Omar, M.A., Durdu, A. (2020). Review and investigation of simplified rules fuzzy logic speed controller of high performance induction motor drives. IEEE Access, 8: 49377-49394. https://doi.org/10.1109/ACCESS.2020.2977115
[26] Lilly, J.H. (2011). Fuzzy Control and Identification. John Wiley & Sons. https://doi.org/10.1002/9780470874240
[27] Rezaie, H., Kazemi-Rahbar, M.H. (2019). Enhancing voltage stability and LVRT capability of a wind-integrated power system using a fuzzy-based SVC. Engineering Science and Technology, an International Journal, 22(3): 827-839. https://doi.org/10.1016/j.jestch.2018.12.018
[28] Saleem, B., Badar, R., Judge, M.A., Manzoor, A., ul Islam, S., Rodrigues, J.J. (2021). Adaptive recurrent NeuroFuzzy control for power system stability in smart cities. Sustainable Energy Technologies and Assessments, 45: 101089. https://doi.org/10.1016/j.seta.2021.101089