Pooja Kamat![]()
© 2024 The author. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This paper proposes a fault precognition system designed for predictive maintenance in bearing systems aimed at improving Remaining Useful Life (RUL) estimation accuracy. This study makes use of the Pronostia-bearing dataset, a recognized standard for RUL prediction and predictive maintenance. It includes vibration data captured by accelerometer sensors along two axes (X and Y), which shows how bearings deteriorate under different operation circumstances. The extensive size of the dataset, which includes several bearings experiencing progressive deterioration, guarantees strong validation of the suggested fault precognition and RUL prediction system in actual maintenance situations. The system utilizes the Pronostia bearing dataset, employing time-domain feature extraction, automated feature ranking, and fault pattern classification through K-means clustering with Silhouette Coefficients. A core component of the system is an Autoencoder-LSTM model, which identifies early fault occurrences by analyzing reconstruction loss thresholds—quantitative measures of deviation between observed and reconstructed data. These thresholds serve as indicators of anomalous behaviour, distinguishing normal operations from fault-prone data clusters. The system then estimates RUL using various LSTM variants, including Vanilla LSTM, BiLSTM, CNN-LSTM, StackLSTM, ConvLSTM and Encoder-Decoder LSTM, with performance evaluated using Mean Squared Error (MSE) and R² scores. The results demonstrate that incorporating fault precognition into the system significantly enhances prediction accuracy, facilitating proactive maintenance and improving operational reliability.
failure precognition, remaining useful life, predictive maintenance, autoencoder-LSTM, anomaly detection
The advent of Industry 4.0 has transformed manufacturing and maintenance operations by incorporating smart technologies like the Internet of Things (IoT), big data analytics, and artificial intelligence [1, 2]. Predictive Maintenance is one of the strong pillars of Industry 5.0, which allows for the early prediction of failures of critical machinery and the reduction of unexpected downtimes [3]. Predictive maintenance identifies a crucial element: accurate estimations of Remaining Useful Life (RUL) to schedule preventive maintenance interventions at the right time, limit unexpected downtimes, and cut operational costs. Precise RUL estimations are critical in optimizing resource allocation and extending the lifespan of the most vital machinery components of critical facilities, such as manufacturing, aviation, and energy industries [4]. All of these have laid a foundation for integrating fault pre-detection with predictive maintenance, which has led to more reliable and cost-effective operations in modern industries [5].
The conventional RUL prediction approaches, however, largely ignore the early detection of a fault in machinery degradation, and hence, it might lead to lower predictions in precision [6]. In traditional methods of RUL estimation, fault detection and degradation modelling are usually treated as different tasks and, hence, face limitations concerning the early onset of faults.
The novelty of this work is the combination of fault precognition, the step that identifies fault onset with reconstruction loss thresholds—with advanced RUL prediction models. This proposed methodology comprises extracting and ranking time-domain features [7] from the accelerometer data, followed by K-means clustering for the classification of operational data into normal and fault-prone patterns [8]. Utilized an Autoencoder-LSTM network [9] and, after that, the framework detects initial faults appearance via reconstruction loss threshold analysis so distinguishing between normal operation and the onset of faults.
The data is split to be used as a specific input for different LSTM-based RUL models, such as Vanilla LSTM [10], BiLSTM [11], CNN-LSTM [12], ConvLSTM [13] and Encoder-Decoder LSTM [14]. The novelty of this study is its ability to give a complete and applied solution for predictive maintenance, which is validated by the Pronostia-bearing dataset. By coupling fault pre-recognition with RUL prediction, the proposed framework contributes to advancements in the area of machinery health monitoring towards more reliable and cost-effective operations.
Condition-based monitoring (CBM) has been one of the more significant areas of evolution over the years-from manual inspections to sophisticated automated techniques [15, 16]. The early approaches of CBM were based on visual inspections and simple measurements such as vibration or temperature thresholds for assessing equipment health [17, 18]. The application of deep learning techniques in machinery health monitoring, and in particular for RUL prediction, has come to be remarkable because they can autonomously extract features and model complex temporal dependencies [19, 20]. Recent studies indicate that deep learning models are capable of good performance in anomaly detection and RUL estimation tasks [21].
Reconstruction-based models, especially autoencoders, have recently been widely used in anomaly detection for identifying drifting behavior in machinery [22]. Zhao et al. [23] showed how Autoencoder can be used to detect faults in bearings by using robust anomaly detection under various operating conditions. The work of Yan et al. [24] proposed a Hybrid Robust Convolutional Autoencoder (HRCAE) with a parallel convolutional distribution fitting module and fused directional distance loss function to improve unsupervised anomaly detection in noisy machine tool data, outperforming traditional unsupervised autoencoder methods. Recurrent Neural Networks (RNNs) and its variants like Long Short-Term Memory networks have been widely used for RUL prediction [25, 26]. Afridi et al. [27] proposed an LSTM-based framework to predict the RUL of bearings, outperforming traditional machine learning techniques in prediction accuracy. Fan et al. [28] extended this work by employing BiLSTM models, which leverage bidirectional processing to improve temporal dependency modelling, thereby enhancing prediction performance. Hybrid models combining Convolutional Neural Networks (CNNs) and LSTM architectures have also gained traction in recent years [29, 30]. Wang et al. [11] demonstrated a deep learning fusion algorithm combining 1-D CNN, LSTM, and a self-attention mechanism effectively predicts the RUL of turbofan engines under multi-operating-point (MOP) mode, outperforming existing approaches.
However, most existing studies treat anomaly detection and RUL prediction as separate processes, often neglecting the importance of fault precognition for enhancing RUL estimation accuracy. Fault precognition—the ability to detect the onset of anomalies and incorporate this information into RUL predictions—has been largely overlooked. Additionally, while hybrid deep learning models have shown promise, they do not integrate early anomaly detection into the RUL prediction pipeline, limiting their effectiveness in capturing degradation dynamics [31].
These gaps are addressed in this study by considering a new unified framework that combines fault precognition and RUL prediction. This framework uses the Autoencoder-LSTM model to identify faults from their onset and other various variants of LSTM for precise RUL estimation. Thus, early fault detection coupling with degradation modeling is anticipated to improve predictive accuracy towards a general solution for predictive maintenance in machinery systems.
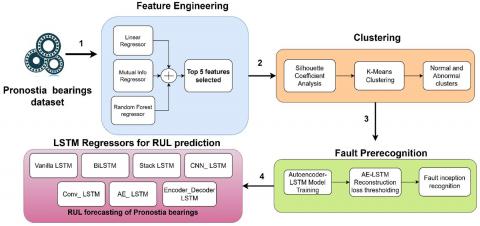
This research introduces a structured methodology to improve the precision of RUL prediction by integrating early fault detection with the capabilities of deep learning models. As presented in Figure 1, the proposed framework for the estimation of RUL is observed to be multi-step and encompasses feature extraction, feature selection, clustering for the recognition of fault patterns, and finally, fault precognition-enabled RUL estimation using deep learning models.
Figure 1. Proposed methodology
3.1 Dataset description
The Pronostia bearing dataset [32], a recognized standard for predictive maintenance and RUL estimate tasks, is used in the study. The data collection is derived from accelerometer vibration data recordings that track deterioration over time as operating conditions for bearings change. Two axes (X and Y) of data were obtained by the accelerometer sensors, which produced characteristic vibration signatures that are crucial for bearing health. A complete dataset for testing fault detection and RUL prediction algorithms is provided by the inclusion of many bearings that worsen with time.
3.2 Feature extraction
Initial steps are feature extraction in the time domain from the vibration data collected by both the X and Y axis accelerometers. The computed features were RMS, peak amplitude, and kurtosis, as they are adequate for showing the trend of wear and degradation under variable functioning environments [33]. These features represent the underlying behavior of the data necessary for the detection of changes indicating early faults [34].
3.3 Feature ranking and selection
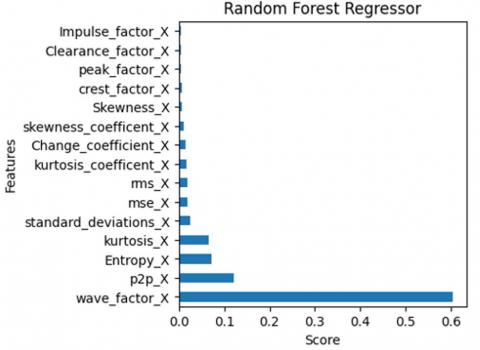
After extraction, a feature ranking and selection approach was applied using regression-based techniques (linear regressor [35], mutual information regressor [36], and random forest regressor [37]). This produced feature rankings that emphasized features highly relevant to degradation patterns, thus optimizing the input data and reducing computational complexity. For each sensor axis, a cumulative list of five top-ranked features were selected, ensuring that only the most informative features contributed to the subsequent clustering. Figure 2 illustrates the different feature ranking feature selection methods used in this study.
(a)
(b)
(c)
Figure 2. Feature ranking and selection (a) Linear regressor (b) Mutual Info regressor (c) Random forest regressor
3.4 Clustering for fault pattern identification
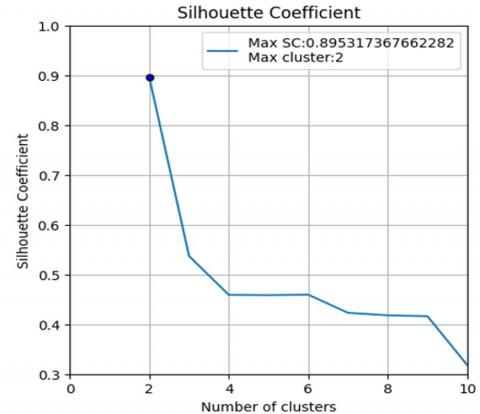
K-means clustering with the Silhouette Coefficient was employed on the selected time-domain features to identify distinct fault patterns [38]. Clustering helped group the data into normal and fault-prone clusters, with the optimal number of clusters determined by maximizing the Silhouette Coefficient [39]. The Silhouette Coefficient is the measure of the quality of clustering, measuring how similar points are in a cluster compared to those in other clusters. It is defined as:
S=b−amax (1)
where, a is the average intra-cluster distance, that is, the distance between a point and other points in the same cluster, and b is the average inter-cluster distance, that is, the distance between a point and points in the nearest cluster.
The coefficient ranges from -1 to 1, where values close to 1 indicate well-separated, tight clusters and values near 0 or negative values indicate overlapping clusters or poor separation between clusters.
To find the optimal number of clusters, the Silhouette Coefficient was computed for all different cluster numbers, and the configuration with the highest average coefficient is chosen. This ensures the meaningful grouping of data by this clustering algorithm, separating faulty patterns from normal operation significantly. Thresholds for anomaly detection within each cluster were defined based on these clustering results, which segregated data points into normal and faulty categories, forming the basis for supervised anomaly detection in the next step [40]. Figure 3 represents the K-means clustering technique with the Silhouette Coefficient approach used in this work.
(a)
(b)
(c)
Figure 3. K-means clustering (a) Sihoutte Coefficient Score=2 for cluster formation (b) Cluster 1 (c) Cluster 2
3.5 Anomaly detection using autoencoder-LSTM
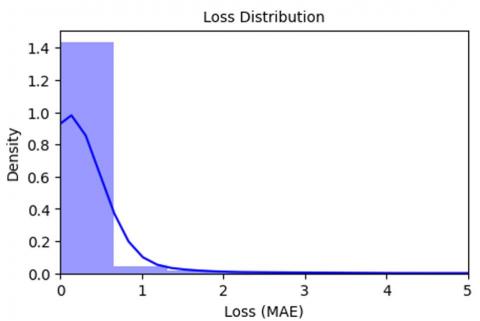
An Autoencoder-LSTM model was applied to normal and fault-prone clusters identified in the previous step. The Autoencoder-LSTM framework allowed the model to learn normal operational patterns and detect anomalies by evaluating reconstruction loss [41]. The loss values from a validation dataset with only normal operational data were used to set the reconstruction loss thresholds. A statistical boundary, such as the 95th percentile of the loss distribution, was defined to separate normal behaviour from anomalies. Data points exceeding this threshold were identified as fault-onset events. This ensures that any deviations will be caught early on and therefore allows the degradation-relevant data to be segmented for use in RUL prediction models [42].
3.6 RUL prediction
To estimate RUL, the dataset was segmented at the timestamp of the first detected anomaly, isolating degradation data. These data were fed into various LSTM-based models, such as Vanilla LSTM, BiLSTM, CNN-LSTM, and others, to predict RUL. The performance of the mentioned models was monitored through Mean Squared Error (MSE) and R2 scores [43]. Lower MSE error values and R2 scores closer to 1 denote higher accuracy of prediction [44]. Using fault pre-recognized data improved the performance of these models, thus showing the potential of the framework in giving high accuracy estimates for the RUL [45]. The mathematical equations for MSE and R2 scores are as follows:
M S E=\frac{1}{n} \sum_{i=1}^n\left(y_i-\hat{y}_i\right)^2 (2)
R^2=1-\frac{\sum_{i=1}^n\left(y_i-\hat{y}_i\right)^2}{\sum_{i=1}^n\left(y_i-\bar{y}\right)^2} (3)
where,
y_i: The actual value of the dependent variable for the ith data point.
\hat{y}_i: The forecasted value of the response variable for the i-th observation.
\bar{y}: The mean of the original values.
In this section, the results of the proposed framework are presented and interpreted, with a focus on the effectiveness of fault precognition using the Autoencoder-LSTM model and the accuracy of RUL estimation using different LSTM variants. The results reveal the capacity of the framework to appropriately detect faults and improve RUL predictions through structured early fault detection methodology.
4.1 Deep learning empowered fault precognition
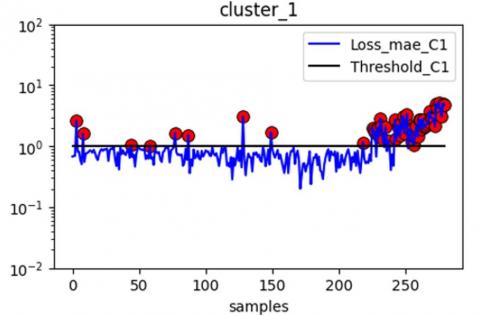
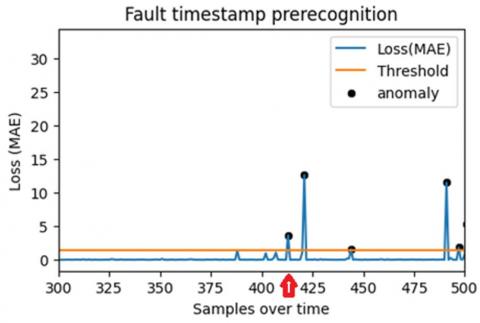
The Autoencoder-LSTM proved to be highly effective in fault precognition based on reconstruction loss thresholds, which were then used for early detection of failure-related behaviors diverging from normal operation. When applied to the clusters formed using K-means, this model identified subtle shifts in the vibration data with fault-onset well before failure. For instance, as presented in Figure 4, with the use of a reconstruction loss threshold of 0.5, the model in bearing 1 of the Pronostia dataset was able to detect the initial deviation which was validated as an early fault indicator. The capability of precognition of this fault was consistently observed over other bearings as well. Determining these early fault occurrences, the framework managed to design a strong basis for early RUL estimation, thus enhancing the process of predictive maintenance and intervention.
(a)
(b)
(c)
Figure 4. Fault precognition (a) AE-LSTM reconstruction threshold (b) Anomaly detection (c) Fault timestamp precognition
4.2 RUL estimation using LSTM models
Following fault precognition, RUL estimation was conducted using a variety of LSTM-based models, including Vanilla LSTM, BiLSTM, CNN-LSTM, Stack LSTM, Conv-LSTM, Autoencoder-LSTM, and Encoder-Decoder LSTM. The models were evaluated using Mean Squared Error (MSE) and R2 scores to assess their predictive accuracy. Figure 5 depicts the RUL estimation results of each LSTM variants for Pronostia bearing 1_1. Similar predictive capabilities were observed for rest of the bearings.
4.3 Results and discussion
Table 1 compares LSTM models for predicting the RUL of Pronostia bearings. The performance analysis across seven bearings indicates that AE-LSTM and Encoder-Decoder Lstm have provided the best results with regards to achieving low MSE along with high R² scores throughout.AE-LSTM performed exceptionally with the lowest MSE values for bearings like 1 and 2, though its R² scores varied slightly. Encoder-Decoder LSTM also excelled, especially for bearings 4 and 5, where it managed longer sequence dependencies well. Stack LSTM and CNN_1D LSTM models displayed moderate accuracy, with notable R² performance in bearings like 6, showcasing their depth and feature extraction strengths. Conv LSTM achieved high R² for some bearings but with variable MSE, suggesting inconsistency in prediction. Meanwhile, Vanilla LSTM and Bi-LSTM provided competitive baseline results with reliable R2 scores on bearings 1 and 2.
Table 2 presents the analysis of the model complexities of the LSTM variants. Model complexity is assessed by evaluating the number of parameters (weights and biases), the number of layers, and the units/neurons in each layer. Additionally, metrics like model size and GFLOPs are used to gauge suitability for memory-constrained deployments and storage efficiency. It can be observed that Vanilla LSTM is the simplest model, efficient for basic sequential tasks. Bi-LSTM offered improved performance over Vanilla LSTM for bidirectional dependencies with moderate complexity. Stacked LSTM added complexity and depth, capturing more intricate dependencies in data. CNN-LSTM, though computationally intensive due to convolutional layers, was suitable for feature-rich sequential data. Conv-LSTM provides a balance between complexity and efficiency for spatiotemporal data. Encoder-Decoder LSTM excelled in handling sequential patterns with higher parameter requirements. AE-LSTM handled noise and feature learning effectively at higher computational costs.
In summary, AE-LSTM and Encoder-Decoder LSTM proved to be more accurate. Then comes Stack LSTM and CNN_1D LSTM, which both boast balanced accuracy with computational efficiency.
The proposed framework offers several advantages for real-world predictive maintenance, such as early fault detection, accurate RUL prediction, and reduced unplanned downtime. Its modular design ensures scalability across various machinery, while real-time monitoring enables prompt decision-making in critical industries like aerospace and automotive.
Figure 5. RUL prediction of bearing using LSTM models
Table 1. Comparative analysis of LSTM models
|
Bearing Number |
Performance Metrics |
Vanilla_LSTM |
Bi_LSTM |
Stack_LSTM |
CNN_1D_LSTM |
Conv_LSTM |
AE_LSTM |
Encoder_Decoder_LSTM |
|
Bearing 1 |
MSE |
0.00141 |
0.001386 |
0.001425 |
0.001373 |
0.001394 |
0.000723 |
0.0012 |
|
R2 score |
0.978 |
0.986 |
0.941 |
0.957 |
0.963 |
0.912 |
0.976 |
|
|
Bearing 2 |
MSE |
0.001332 |
0.001723 |
0.002032 |
0.001804 |
0.002336 |
0.000463 |
0.000272 |
|
R2 score |
0.976 |
0.981 |
0.957 |
0.978 |
0.973 |
0.903 |
0.97 |
|
|
Bearing 3 |
MSE |
0.00105 |
0.00041 |
0.00052 |
0.00099 |
0.00705 |
0.00605 |
0.00455 |
|
R2 score |
0.978 |
0.978 |
0.94 |
0.968 |
0.979 |
0.9 |
0.974 |
|
|
Bearing 4 |
MSE |
0.00021 |
0.00017 |
0.0005 |
0.00037 |
0.00021 |
0.0003 |
0.000078 |
|
R2 score |
0.978 |
0.98 |
0.907 |
0.975 |
0.956 |
0.906 |
0.965 |
|
|
Bearing 5 |
MSE |
0.00305 |
0.00329 |
0.00301 |
0.0045 |
0.0051 |
0.0041 |
0.00087 |
|
R2 score |
0.955 |
0.975 |
0.905 |
0.975 |
0.951 |
0.938 |
0.926 |
|
|
Bearing 6 |
MSE |
0.01171 |
0.01414 |
0.01037 |
0.01631 |
0.02408 |
0.01531 |
0.00764 |
|
R2 score |
0.973 |
0.975 |
0.981 |
0.989 |
0.992 |
0.933 |
0.971 |
|
|
Bearing 7 |
MSE |
0.0026 |
0.00408 |
0.00236 |
0.00366 |
0.00525 |
0.07894 |
0.00561 |
|
R2 score |
0.977 |
0.977 |
0.962 |
0.969 |
0.996 |
0.934 |
0.972 |
Table 2. Model complexity analysis of LSTM variants
|
Model Parameters |
Vanilla_LSTM |
Bi_LSTM |
Stack_LSTM |
CNN_1D_LSTM |
Conv_LSTM |
AE_LSTM |
Encoder_Decoder_LSTM |
|
Total Parameters |
23,456 |
24,501 |
35,421 |
74,379 |
73,025 |
78,932 |
5,02,601 |
|
Number of Layers |
2 (One LSTM, one Dense) |
2 (One Bi-LSTM, one Dense) |
3 (Two LSTM, one Dense) |
5 (Conv1D, MaxPooling1D, Flatten, LSTM, Dense) |
3 (ConvLSTM2D, Flatten, Dense) |
4 (Encoder, Decoder, LSTM, Dense) |
5 (LSTM, RepeatVector, LSTM, TimeDistributed Dense) |
|
Number of Units |
50 in LSTM, 1 in Dense |
100 in Bi-LSTM (50 in each direction), 1 in Dense |
64 in each LSTM, 1 in Dense |
64 filters in Conv1D, 50 in LSTM, 1 in Dense |
64 filters in ConvLSTM2D, 1 in Dense |
128 in Encoder & Decoder, 1 in Dense |
200 in LSTM, 100 in TimeDistributed Dense, 1 in last Dense |
|
Model Size (MB) |
0.0875 |
0.09358 |
0.145 |
0.2855 |
0.1477 |
0.341 |
1.942 |
|
GigaFLOPS |
0.325 |
0.3967 |
0.721 |
5.39 |
0.7947 |
1.87 |
0.92 |
This paper proposes a fault precognition framework that combines deep learning models with clustering techniques to improve fault detection and RUL prediction in bearing systems. The research is aligned with the advancement of predictive maintenance strategies by filling some of the crucial gaps in early fault identification and degradation modelling. Key contributions and findings are summarized as follows:
Future work can further enhance the robustness of the framework by including additional sensor data, such as temperature and pressure, and validating its performance under complex, noisy industrial environments. Such advancements will ensure increased applicability and reliability across real-world scenarios, enhancing machinery health monitoring and operational efficiency.
This paper was supported by the Research Support Fund (RSF) of Symbiosis International (Deemed University), Pune, India.
[1] Paramesha, M., Rane, N.L., Rane, J. (2024). Big data analytics, artificial intelligence, machine learning, internet of things, and blockchain for enhanced business intelligence. Partners Universal Multidisciplinary Research Journal, 1(2): 110-133. https://doi.org/10.5281/zenodo.12827323
[2] Soori, M., Arezoo, B., Dastres, R. (2023). Internet of things for smart factories in industry 4.0, a review. Internet of Things and Cyber-Physical Systems, 3: 192-204. https://doi.org/10.1016/J.IOTCPS.2023.04.006
[3] Gawde, S., Patil, S., Kumar, S., Kamat, P., Kotecha, K., Abraham, A. (2023). Multi-fault diagnosis of industrial rotating machines using data-driven approach: A review of two decades of research. Engineering Applications of Artificial Intelligence, 123: 106139. https://doi.org/10.1016/J.ENGAPPAI.2023.106139
[4] Kamat, P., Kumar, S., Sugandhi, R. (2024). Vibration-based anomaly pattern mining for remaining useful life (RUL) prediction in bearings. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 46(5): 290. https://doi.org/10.1007/s40430-024-04872-4
[5] Singh, M., Goyat, R., Panwar, R. (2024). Fundamental pillars for industry 4.0 development: Implementation framework and challenges in manufacturing environment. The TQM Journal, 36(1): 288-309. https://doi.org/10.1108/TQM-07-2022-0231
[6] Sayyad, S., Kumar, S., Bongale, A., Kotecha, K., Abraham, A. (2023). Remaining useful-life prediction of the milling cutting tool using time-frequency-based features and deep learning models. Sensors, 23(12): 5659. https://doi.org/10.3390/S23125659
[7] Bai, X., Li, M., Di, Z., Dong, W., Liang, J., Zhang, J., Sun, H. (2024). Open circuit fault diagnosis of wind power converter based on VMD energy entropy and time domain feature analysis. Energy Science & Engineering, 12(3): 577-595. https://doi.org/10.1002/ESE3.1637
[8] Hedayati, M., Barzegar, A., Rahimi, A. (2024). Fault diagnosis and prognosis of satellites and unmanned aerial vehicles: A review. Applied Sciences, 14(20): 9487. https://doi.org/10.3390/APP14209487
[9] Yang, C., Kaynardag, K., Lee, G.W., Salamone, S. (2025). Long short-term memory autoencoder for anomaly detection in rails using laser doppler vibrometer measurements. Journal of Nondestructive Evaluation, Diagnostics and Prognostics of Engineering Systems, 8(3): 031003. https://doi.org/10.1115/1.4066765
[10] Cai, C., Lu, Z. (2024). RUL estimation for power electronic devices using RNNs. In 2024 Prognostics and System Health Management Conference (PHM), Stockholm, Sweden, pp. 319-327. https://doi.org/10.1109/PHM61473.2024.00064
[11] Wang, J., Wang, Y., Li, J. (2024). Interpretable and efficient RUL prediction of turbofan engines using EM-enhanced Bi-LSTM with TCN and attention mechanism. Engineering Research Express, 6(3): 035507. https://doi.org/10.1088/2631-8695/AD5F04
[12] Shoorkand, H.D., Nourelfath, M., Hajji, A. (2024). A hybrid CNN-LSTM model for joint optimization of production and imperfect predictive maintenance planning. Reliability Engineering & System Safety, 241: 109707. https://doi.org/10.1016/J.RESS.2023.109707
[13] Deng, F., Chen, Z., Liu, Y., Yang, S., Hao, R., Lyu, L. (2022). A novel combination neural network based on ConvLSTM-transformer for bearing remaining useful life prediction. Machines, 10(12): 1226. https://doi.org/10.3390/machines10121226
[14] Oshida, T., Murakoshi, T., Zhou, L., Ojima, H., Kaneko, K., Onuki, T., Shimizu, J. (2023). Development and implementation of real-time anomaly detection on tool wear based on stacked LSTM encoder-decoder model. The International Journal of Advanced Manufacturing Technology, 127(1): 263-278. https://doi.org/10.1007/S00170-023-11497-9/METRICS
[15] Kostrzewski, M., Melnik, R. (2021). Condition monitoring of rail transport systems: A bibliometric performance analysis and systematic literature review. Sensors, 21(14): 4710. https://doi.org/10.3390/S21144710
[16] Siddiqui, M.M.U.Z., Tabassum, A. (2024). Condition-based monitoring techniques and algorithms in 3d printing and additive manufacturing: A state-of-the-art review. Progress in Additive Manufacturing, 2024: 1-48. https://doi.org/10.1007/S40964-024-00816-5
[17] Kumar, A., Gandhi, C.P., Tang, H., Sun, W., Xiang, J. (2023). Latest innovations in the field of condition-based maintenance of rotatory machinery: A review. Measurement Science and Technology, 35(2): 022003. https://doi.org/10.1088/1361-6501/AD0F67
[18] Liu, Y., Guo, L., Gao, H., You, Z., Ye, Y., Zhang, B. (2022). Machine vision based condition monitoring and fault diagnosis of machine tools using information from machined surface texture: A review. Mechanical Systems and Signal Processing, 164: 108068. https://doi.org/10.1016/J.YMSSP.2021.108068
[19] Darwish, A. (2024). A data-driven deep learning approach for remaining useful life in the ion mill etching process. Sustainable Machine Intelligence Journal, 8: 2-14. https://doi.org/10.61356/SMIJ.2024.8288
[20] Wu, F., Wu, Q., Tan, Y., Xu, X. (2024). Remaining useful life prediction based on deep learning: A survey. Sensors, 24(11): 3454. https://doi.org/10.3390/S24113454
[21] Khaleghi, S., Hosen, M.S., Van Mierlo, J., Berecibar, M. (2024). Towards machine-learning driven prognostics and health management of Li-ion batteries. A comprehensive review. Renewable and Sustainable Energy Reviews, 192: 114224. https://doi.org/10.1016/J.RSER.2023.114224
[22] Meng, Q., Zhu, S. (2023). Anomaly detection for construction vibration signals using unsupervised deep learning and cloud computing. Advanced Engineering Informatics, 55: 101907. https://doi.org/10.1016/J.AEI.2023.101907
[23] Zhao, Y., Hao, H., Chen, Y., Zhang, Y. (2023). Novelty detection and fault diagnosis method for bearing faults based on the hybrid deep autoencoder network. Electronics, 12(13): 2826. https://doi.org/10.3390/ELECTRONICS12132826
[24] Yan, S., Shao, H., Xiao, Y., Liu, B., Wan, J. (2023). Hybrid robust convolutional autoencoder for unsupervised anomaly detection of machine tools under noises. Robotics and Computer-Integrated Manufacturing, 79: 102441. https://doi.org/10.1016/J.RCIM.2022.102441
[25] He, W., Liu, T., Ming, W., Li, Z., Du, J., Li, X., Sun, P. (2024). Progress in prediction of remaining useful life of hydrogen fuel cells based on deep learning. Renewable and Sustainable Energy Reviews, 192: 114193. https://doi.org/10.1016/J.RSER.2023.114193
[26] Wang, S., Fan, Y., Jin, S., Takyi-Aninakwa, P., Fernandez, C. (2023). Improved anti-noise adaptive long short-term memory neural network modeling for the robust remaining useful life prediction of lithium-ion batteries. Reliability Engineering & System Safety, 230: 108920. https://doi.org/10.1016/J.RESS.2022.108920
[27] Afridi, Y.S., Hasan, L., Ullah, R., Ahmad, Z., Kim, J.M. (2023). LSTM-based condition monitoring and fault prognostics of rolling element bearings using raw vibrational data. Machines, 11(5): 531. https://doi.org/10.3390/MACHINES11050531
[28] Fan, Z., Li, W., Chang, K.C. (2023). A bidirectional long short-term memory autoencoder transformer for remaining useful life estimation. Mathematics, 11(24): 4972. https://doi.org/10.3390/MATH11244972
[29] Kamat, P., Kumar, S., Patil, S., Kotecha, K. (2024). Anomaly-informed remaining useful life estimation (AIRULE) of bearing machinery using deep learning framework. MethodsX, 12: 102555. https://doi.org/10.1016/J.MEX.2024.102555
[30] Qu, Z., Zhu, L., Ma, S., Zhang, B. (2024). Remaining useful life prediction of high-speed railroad contact network based on stacking integrated attention-LSTM-CNN deep learning. Arabian Journal for Science and Engineering, 49: 16137-16154. https://doi.org/10.1007/s13369-024-08854-5
[31] Warke, V., Kumar, S., Bongale, A., Kamat, P., Kotecha, K., Selvachandran, G., Abraham, A. (2024). Improving the useful life of tools using active vibration control through data-driven approaches: A systematic literature review. Engineering Applications of Artificial Intelligence, 128: 107367. https://doi.org/10.1016/J.ENGAPPAI.2023.107367
[32] Nectoux, P., Gouriveau, R., Medjaher, K., Ramasso, E., Chebel-Morello, B., Zerhouni, N., Varnier, C. (2012). PRONOSTIA: An experimental platform for bearings accelerated degradation tests. In IEEE International Conference on Prognostics and Health Management, PHM'12, pp. 1-8.
[33] Kasiviswanathan, S., Gnanasekaran, S., Thangamuthu, M., Rakkiyannan, J. (2024). Machine-learning-and internet-of-things-driven techniques for monitoring tool wear in machining process: A comprehensive review. Journal of Sensor and Actuator Networks, 13(5): 53. https://doi.org/10.3390/JSAN13050053
[34] Dong, K., Lotfipoor, A. (2023). Intelligent bearing fault diagnosis based on feature fusion of one-dimensional dilated CNN and multi-domain signal processing. Sensors, 23(12): 5607. https://doi.org/10.3390/S23125607
[35] Cao, Y., Liu, G., Sun, J., Bavirisetti, D.P., Xiao, G. (2023). PSO-Stacking improved ensemble model for campus building energy consumption forecasting based on priority feature selection. Journal of Building Engineering, 72: 106589. https://doi.org/10.1016/J.JOBE.2023.106589
[36] Zhang, P., Liu, G., Song, J. (2023). MFSJMI: Multi-label feature selection considering join mutual information and interaction weight. Pattern Recognition, 138: 109378. https://doi.org/10.1016/J.PATCOG.2023.109378
[37] Petković, M., Džeroski, S., Kocev, D. (2023). Feature ranking for semi-supervised learning. Machine Learning, 112(11): 4379-4408. https://doi.org/10.1007/s10994-022-06181-0
[38] Martins, A.A., Vaz, D.C., Silva, T.A., Cardoso, M., Carvalho, A. (2024). Clustering of wind speed time series as a tool for wind farm diagnosis. Mathematical and Computational Applications, 29(3): 35. https://doi.org/10.3390/MCA29030035
[39] Ripan, R.C., Sarker, I.H., Hossain, S.M.M., Anwar, M.M., Nowrozy, R., Hoque, M.M., Furhad, M.H. (2021). A data-driven heart disease prediction model through K-means clustering-based anomaly detection. SN Computer Science, 2(2): 112. https://doi.org/10.1007/s42979-021-00518-7
[40] Hajihosseinlou, M., Maghsoudi, A., Ghezelbash, R. (2024). A comprehensive evaluation of OPTICS, GMM and K-means clustering methodologies for geochemical anomaly detection connected with sample catchment basins. Geochemistry, 84(2): 126094. https://doi.org/10.1016/J.CHEMER.2024.126094
[41] Kamat, P.V., Sugandhi, R., Kumar, S. (2021). Deep learning-based anomaly-onset aware remaining useful life estimation of bearings. PeerJ Computer Science, 7: e795. https://doi.org/10.7717/peerj-cs.795
[42] Lee, Y., Park, C., Kim, N., Ahn, J., Jeong, J. (2024). LSTM-autoencoder based anomaly detection using vibration data of wind turbines. Sensors, 24(9): 2833. https://doi.org/10.3390/S24092833
[43] Devasahayam, S. (2023). Deep learning models in Python for predicting hydrogen production: A comparative study. Energy, 280: 128088. https://doi.org/10.1016/j.energy.2023.128088
[44] Shah, M., Borade, H., Sanghavi, V., Purohit, A., Wankhede, V., Vakharia, V. (2023). Enhancing tool wear prediction accuracy using Walsh–Hadamard transform, DCGAN and dragonfly algorithm-based feature selection. Sensors, 23(8): 3833. https://doi.org/10.3390/S23083833
[45] Jieyang, P., Kimmig, A., Dongkun, W., Niu, Z., Zhi, F., Jiahai, W., Ovtcharova, J. (2023). A systematic review of data-driven approaches to fault diagnosis and early warning. Journal of Intelligent Manufacturing, 34(8): 3277-3304. https://doi.org/10.1007/s10845-022-02020-0