Agung Prayitno*![]() | Veronica Indrawati
| Veronica Indrawati![]() | Yohanes Gunawan Yusuf
| Yohanes Gunawan Yusuf![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The challenge in designing distributed controllers for vehicle platoon synchronization arises when full-state information for control algorithm calculations cannot be obtained from the entire vehicle. Therefore, this paper presents a control scheme using a cooperative observer to estimate full-state information, enabling its use in calculating control signals. Instead of relying solely on a control signal proportional to the cooperative tracking error, the proposed control signal includes an additional integral form of the cooperative tracking error. This addition is expected to mitigate the effects of disturbances experienced by follower vehicles. Distributed control generally comprises two major components: The proportional-integral (PI) controller and the cooperative observer. The paper provides conditions for choosing control parameter values to guarantee the stability of the vehicle platoon. A numerical simulation of a vehicle platoon comprising one leader and ten followers is presented to demonstrate performance and validate the research results. Simulation results indicate that the controller performs effectively when followers experience constant disturbances, demonstrating the continuous achievement of vehicle platoon synchronization.
cooperative observer, distributed proportional-integral controller, limited output information, vehicle platoon
The intelligent transportation system of the future will be increasingly implemented with the rapid development of sensor, actuator, computing, communication, and information system technology. As this field advances, it becomes possible to exchange information among road users, infrastructure, vehicles, transportation platforms, and existing public facilities. Therefore, the keyword 'collaboration' will emerge as a trend in future transportation systems. Notably, collaboration between vehicles can provide solutions to various existing problems. One such collaboration involves vehicles traveling in groups, commonly known as vehicle platoons. A vehicle platoon comprises a group of autonomous vehicles that travel in a parallel formation, resembling a series of train cars. The potential benefits of this platoon formation are substantial, as it can optimize road capacity, save fuel, reduce congestion and air pollution, and increase economic productivity [1, 2]. With this significant potential, it is not surprising that research into vehicle platoon development is extensive and actively conducted by researchers worldwide.
To form a platoon configuration, the leading vehicle acts as the leader, providing a reference for other vehicles, which function as followers. The leader is responsible for broadcasting information to some or all of its followers. Similarly, each follower is equipped with the ability to send and receive information from its neighbors. The flow of information from source to receiver depends on an agreed-upon topology. In general, there are six topologies used in vehicle platoons, namely: Predecessor Following (PF), Two Predecessor Following (TPF), Predecessor Following Leader (PFL), Two Predecessor Following Leader (TPFL), Bidirectional (BD), and Bidirectional Leader (BDL) [3]. The first four topologies are classified as directed topologies [4], while the last two are undirected topologies [5]. The characteristics of each topology in the platoon have been extensively reviewed in various studies and can be found at references [3, 6, 7]. Apart from topology, another important component that needs consideration in vehicle platooning is an agreement regarding the distance between vehicle and the one in front of it when moving in a convoy (spacing policy). The distance between vehicles can always be constant, or change over time depending on speed. The first option is usually known as constant spacing policy (CSP) as used by Qiang et al. [8] and Li et al. [9], while the second option can be implemented with the concept of constant time heading (CTH) as used by Gaagai and Horn [10]. These two spacing policies are the most commonly used in vehicle platoon development research, although several other spacing policies also exist, such as the non-linear spacing policy [11] and the delay-based spacing policy [12].
Another component in the vehicle platoon is the distributed controller, which is implemented on each follower. For clarity, a vehicle platoon serves as an application example of the leader-follower multi-agent system (MAS) concept. This implies that the distributed controller developed from the leader-follower MAS concept can generally be implemented for vehicle platoons. An example of this is the concept of cooperative state variable feedback control (CSVFB) [13]. Several studies developed from the CSVFB concept for vehicle platoons include references [14, 15]. In Prayitno and Nilkhamhang’ study [14], the output from CSVFB is used as a virtual reference model for the actual follower model to eliminate the effects of disturbances and quickly relay information on changes in the leader's input. This enables each follower to follow the leader, who is maneuvering at changing velocities. Meanwhile, Prayitno and Nilkhamhang [15] presented nominal model and CSVFB are used in the reference model for the actual follower, which applies adaptive control to eliminate uncertain dynamics from the follower vehicle. The use of the adaptive approach in cooperative control of vehicle platoons is also explored by Hu et al. [16] and Harfouch et al. [17]. Another example of the cooperative control for platoon synchronization is serial distributed model predictive control (MPC), as proposed by Zhou et al. [18]. This controller leverages both linear feedback control and Model Predictive Control (MPC) to ensure local stability and l∞ and l2-norm string stability. However, all controllers in the research above were designed assuming that all information can be obtained. This condition may become problematic if it turns out that not all information can be obtained directly, possibly due to the absence of certain sensors or damage to the sensors.
Distributed controller designs based on the absence of full-state information from vehicles have been proposed by several researchers, for leader-follower MAS in general, as well as specifically for vehicle platoons. In general leader-follower MAS, Zhao et al. [19] used an observer to estimate the velocity and acceleration of the leader. Yan and Fang [20] proposed an input-observer-based leader-follower approach for first-order and second-order tracking problems. Lewis et al. [13] integrated cooperative observers and controllers for leader-follower MAS problems in various schemes: neighborhood controller-neighborhood observer, local controller-neighborhood observer, and local controller-local observer. For platoon problem, Prayitno et al. [21] designed a distributed model reference adaptive control system for followers with limited output information, where the observer is used to estimate full-state information. The estimation results are then used to design the controller, in this case, nominal control and adaptive control, which are employed to eliminate uncertain dynamics in the vehicle. Furthermore, Prayitno et al. [22] used an observer to design a distributed reference control model for platoon synchronization, where the leader moves at a changing velocity. The stability of the platoon is also analyzed when the information flow between vehicles experiences intermittent information. The studies mentioned above share similarities in nominal control, specifically proportional to cooperative tracking error. A distributed controller that solely depends on proportional tracking error cooperation is susceptible to steady-state errors if the follower experiences constant disturbances [23], which often occur due to issues with the engine, transmission, or other powertrain components.
Distributed Proportional Integral controller (PI) schemes for general MAS have been widely proposed, typically utilized to mitigate the effects of disturbances. Andreasson et al. [24] proposed a distributed PI controller to reduce disturbances and ensure the stability of the MAS. Meanwhile, Gionfra et al. [25] introduced a PID-like distributed controller with parameter tuning based on Linear Matrix Inequalities (LMI) solutions, applied to handle leaderless consensus and leader-follower MAS in the presence of disturbances and changing references. Burbano et al. [26] proposed a distributed PID protocol as a simple and effective solution for the consensus of networks of heterogeneous linear systems with constant disturbance. Lui et al. [27] proposed fully distributed PID for heterogeneous high-order MAS. Furthermore, Lv et al. [28] presented a distributed PI protocol with a virtual leader to achieve consensus in heterogeneous linear MAS with a directed topology, focusing on selecting control parameters and guaranteeing the uniformly ultimate boundedness of the consensus error, especially when agents are exposed to bounded disturbances. Meanwhile, in a particular application of vehicle platoons, Manfredi et al. [29] proposed a PI-based distributed control to form platoons with the capability of handling heterogeneous platoons and compensating for nonlinear and uncertain drivetrain dynamics without the need for feedforward control actions. Hou et al. [30] used a double-layer distributed cascade PID controller for a vehicle platoon, where the inner loop PID is used to control the velocity error and the outer loop PID is used to control the distance error. However, it is worth mentioning that this controller relies on having full-state information.
This paper introduces a distributed Proportional Integral controller scheme for vehicle platoons, designed to address limitations in obtaining full-state information. The absence of full-state information is mitigated by a cooperative observer that produces estimates of the full state of the vehicle. Using the results of this estimation, a distributed PI controller is designed, where the proportional term utilizes full-state estimation, and the integral term relies on position estimation only. The primary contributions of this study are as follows:
(1) In contrast to Manfredi et al.’s study [29], the proposed distributed PI controller incorporates a cooperative observer, allowing implementation even when followers have limited access to full-state information. Furthermore, this proposed control accounts for the vehicle's third-order model.
(2) The proposed control mitigates the effect of constant disturbances, which cannot be achieved by the approach proposed by Lewis et al. [13] when implemented for vehicle platoons, as discussed in Prayitno et al.’s study [23].
(3) Stability requirements for the PI control parameter tuning process have been provided to guarantee the stability of the vehicle platoon.
This paper is organized as follows: following the introduction, the problem formulation will be presented clearly. Then, the proposed PI controller scheme will be explained in detail, along with the dynamics of the system. The results and the stability analysis of this research will be presented in the "Main stability result" section. The research results will be validated using numerical simulation, analyzed, and conclusions drawn.
Suppose vehicles forming a heterogeneous vehicle platoon have the following dynamics:
$\left\{\begin{array}{l}\dot{p}_i(t)=v_i(t) \\ \dot{v}_i(t)=a_i(t) \\ \dot{a}_i(t)=-\frac{1}{\tau_i} a_i(t)+\frac{1}{\tau_i} u_i(t)\end{array}, i \in\{0,1,2, \ldots, N\}\right.$ (1)
The foremost vehicle, designated as $i=0$, is assumed to maintain a constant velocity, achieved by applying $u_0(t)=0$. Followers are represented by $i \in\{1,2, \ldots, N\}$ which have controller input $u_i(t)$. Different values of inertial time lag, $\tau_i$, represent the heterogeneities of the vehicles. Each vehicle's state is defined by its position, velocity, and acceleration, represented as $\left\{p_i(t), v_i(t), a_i(t)\right\}$. While, the output is represented by:
$y_i(t)=C_i\left[\begin{array}{l}p_i(t) \\ v_i(t) \\ a_i(t)\end{array}\right]$ (2)
where, $C_i$ is the output matrix. It is assumed that not all the above information is available for the followers.
Vehicle platoon synchronization is formed by utilizing information collected from neighboring vehicles which depend on the communication topology in use. To described the information flow between vehicles in the topology, a graph $\mathcal{G}(\mathcal{N}, \mathcal{E})$ is used where $\mathcal{N}=\left\{n_1, n_2, \ldots, n_N\right\}$ is set of followers, and $\mathcal{E} \subseteq \mathcal{N} \times \mathcal{N}$ is a set of connections between the followers. Two matrices are typically used to describe the complete information flow in the platoon. To represent the information flow between followers, an adjacency matrix is used, which can be described as follows:
$\mathcal{A}=\left[a_{i j}\right] \in \mathbb{R}^{N \times N}$ (3)
where, $a_{i j}=1$ indicates that follower $i$ is receiving information from follower $j$, otherwise $a_{j j}=0$. The information from the lead vehicle to all followers is described using a pinning gain matrix.
$\mathcal{S}=\operatorname{diag}\left\{s_{11}, s_{22}, \ldots, s_{N N}\right\}$ (4)
where, $s_{i i}=1$ indicates that follower $i$ directly receives information from the leader, otherwise $s_{i i}=0$.
This paper aims to develop a distributed PI controller based on a cooperative observer for each heterogeneous follower, ensuring that all followers synchronize with the leader’s velocity and achieve the desired constant inter-vehicle distance:
$\left\{\begin{array}{l}\lim _{t \rightarrow \infty}\left\|p_i(t)-p_j(t)\right\|=d \\ \lim _{t \rightarrow \infty}\left\|v_i(t)-v_0(t)\right\|=0\end{array}\right.$ (5)
where, d is the desired constant inter-vehicular distance between vehicle i and vehicle j.
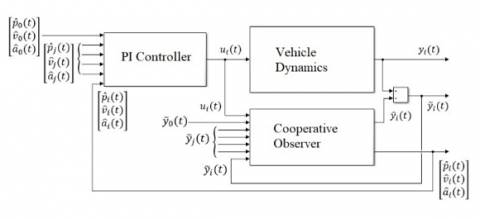
The proposed control is referred to as a distributed proportional-integral controller based on a cooperative observer (distributed PI_CO) as shown in Figure 1, and it will be applied to each follower. It comprises of two primary components: a cooperative observer and a PI controller. The cooperative observer utilizes the internal and neighbors’output estimation error, $\left\{\tilde{y}_i(t), \tilde{y}_j(t), \tilde{y}_0(t)\right\}$ and the control input, $u_i(t)$. Meanwhile, the PI controller, $u_i(t)$, utilizes the internal state estimation $\left\{\hat{p}_i(t), \hat{v}_i(t), \hat{a}_i(t)\right\}$, the neighbors' states estimation that may consist of $\left\{\hat{p}_j(t), \hat{v}_j(t), \hat{a}_j(t)\right\}$ and $\left\{\hat{p}_0(t), \hat{v}_0(t), \hat{a}_0(t)\right\}$. Full-state information from the leader is assumed to be available, and therefore, $p_0(t)=\hat{p}_0(t)$, $v_0(t)=\hat{v}_0(t)$ and $a_0(t)=\hat{a}_0(t)$
By utilizing the collective output estimation errors, a cooperative observer is employed to estimate the full state of each follower. Denote the estimation of the position, velocity and acceleration of the $i$ th follower, as $\left\{\hat{p}_i(t), \hat{v}_i(t), \hat{a}_i(t)\right\}$. Subsequently, the error in state estimation can be expressed as:
$\left\{\begin{array}{l}\tilde{p}_i(t)=p_i(t)-\hat{p}_i(t) \\ \tilde{v}_i(t)=v_i(t)-\hat{v}_i(t) \\ \tilde{a}_i(t)=a_i(t)-\hat{a}_i(t)\end{array}\right.$ (6)
Meanwhile, the output estimation error, $\tilde{y}_i(t)$, is defined as,
$\tilde{y}_i(t)=y_i(t)-\hat{y}_i(t)$ (7)
where $y_i(t)$ and $\hat{y}_i(t)$ denote the output and output estimation of $i$ th vehicle, respectively.
The design of the cooperative observer for each follower is as follows:
$\left[\begin{array}{c}\dot{\hat{p}}_i(t) \\ \dot{\hat{v}}_2(t) \\ \dot{\hat{a}}_i(t)\end{array}\right]=\left[\begin{array}{c}\hat{v}_i(t) \\ \hat{a}_i(t) \\ -\frac{1}{\tau_i} \hat{a}_i(t)\end{array}\right]+\left[\begin{array}{l}0 \\ 0 \\ \frac{1}{\tau_i}\end{array}\right] u_i(t)-c F_i \varphi_i(t)$ (8)
where,
$\varphi_i(t)=\left\{\left[\sum_{j=1}^N a_{i j}\left(\tilde{y}_i(t)-\tilde{y}_j(t)\right)+s_{i i}\left(\tilde{y}_i(t)-\tilde{y}_0(t)\right)\right]\right\}$ (9)
is the cooperative tracking output estimation error. In this context, the coupling gain is denoted by c>0, while the observer gain is represented by Fi and is defined as follows:
$F_i=P_i C_i^T R^{-1}$ (10)
where, Pi is the solution of the observer algebraic Riccati equation (ARE).
$0=A_i{ }^T P_i+P_i A_i+Q-P_i C_i{ }^T R^{-1} C_i P_i$ (11)
with Q and R being positive definite matrices. By considering the vehicle dynamics (1) matrix Ai can be written as:
$A_i=\left[\begin{array}{ccc}0 & 1 & 0 \\ 0 & 0 & 1 \\ 0 & 0 & -\frac{1}{\tau_i}\end{array}\right]$ (12)
Figure 1. Distributed PI_CO block diagram
Remark 1: The selection of observer gain depends on the chosen values of Q and R. This selection represents a trade-off between estimation performance and a reasonable observer signal. Increasing the value of Q will improve the estimation performance, while the opposite is true for R. The estimation performance improves as the value of R decreases. The algebraic Riccati equation can be solved using the CARE solver in Maple 15 or the ‘icare’ command in MATLAB.
The PI-controller for each ith vehicle utilizes the full-state estimation and designed as:
$\begin{gathered}u_i(t)=-\left\{K_{p, i}\left[\sum_{j=1}^N a_{i, j}\left(\hat{p}_i(t)-\hat{p}_j(t)\right)+\mathcal{S}_{i i}\left(\hat{p}_i(t)-\right.\right.\right. \\ \left.\left.\hat{p}_0(t)\right)\right]+K_{v, i}\left[\sum_{j=1}^N a_{i, j}\left(\hat{v}_i(t)-\hat{v}_j(t)\right)+\mathcal{S}_{i i}\left(\hat{v}_i(t)-\hat{v}_0(t)\right)\right] \\ K_{a, i}\left[\sum_{j=1}^N a_{i, j}\left(\hat{a}_i(t)-\hat{a}_j(t)\right)+\mathcal{S}_{i i}\left(\hat{a}_i(t)-\hat{a}_0(t)\right)\right]+ \\ \left.K_{I, i} \int_0^t\left[\sum_{j=1}^N a_{i, j}\left(\hat{p}_i(s)-\hat{p}_j(s)\right)+\mathcal{S}_{i i}\left(\hat{p}_i(s)-\hat{p}_0(s)\right)\right] d s\right\}\end{gathered}$ (13)
where, $K_{p, i}, K_{v, i}, K_{a, i}$ represent the proportional gains for position, velocity, and acceleration, respectively, while $K_{I, i}$ denotes the integral gain.
For establishing the closed-loop dynamics of the heterogeneous vehicle platoon, let define:
$\left\{\begin{array}{l}\overline{\hat{p}}_i(t)=\hat{p}_i(t)-\hat{p}_0(t)-d_{i, 0} \\ \overline{\hat{v}}_i(t)=\hat{v}_i(t)-\hat{v}_0(t) \\ \overline{\hat{a}}_i(t)=\hat{a}_i(t)-\hat{a}_0(t)\end{array}\right.$ (14)
The PI controller (13) can be re-written as:
$\begin{gathered}u_i(t)=-\left\{K_{p, i}\left[\sum_{j=1}^N a_{i, j}\left(\overline{\hat{p}}_i(t)-\overline{\hat{p}}_j(t)\right)+\mathcal{S}_{i i}\left(\overline{\hat{p}}_i(t)\right)\right]+\right. \\ K_{v, i}\left[\sum_{j=1}^N a_{i, j}\left(\overline{\hat{v}}_i(t)-\overline{\hat{v}}_j(t)\right)+\mathcal{S}_{i i}\left(\overline{\hat{v}}_i(t)\right)\right]+ \\ K_{a, i}\left[\sum_{j=1}^N a_{i, j}\left(\overline{\hat{a}}_i(t)-\overline{\hat{a}}_j(t)\right)+\mathcal{S}_{i i}\left(\overline{\hat{a}}_i(t)\right)\right]+ \\ \left.K_{I, i} \int_0^t\left[\sum_{j=1}^N a_{i, j}\left(\overline{\hat{p}}_i(s)-\overline{\hat{p}}_j(s)\right)+\mathcal{S}_{i i}\left(\overline{\hat{p}}_i(s)\right)\right] d s\right\}\end{gathered}$ (15)
Since the leader move at constant velocity, $\dot{\overline{\hat{a}}}_0=0$, the closed-loop tracking error dynamics of the heterogeneous platoon is:
$\begin{gathered}\dot{\overline{\hat{p}}}_i(t)=\overline{\hat{v}}_i(t) \\ \dot{\overline{\hat{v}}}_i(t)=\overline{\hat{a}}_i(t) \\ \dot{\overline{\hat{a}}}_i(t)=-\frac{1}{\tau_i} \overline{\hat{a}}_i(t)-\frac{1}{\tau_i}\left\{K_{p, i}\left[\sum_{j=1}^N a_{i, j}\left(\overline{\hat{p}}_i(t)-\overline{\hat{p}}_j(t)\right)+\right.\right. \\ \left.\mathcal{S}_{i i}\left(\overline{\hat{p}}_i(t)\right)\right]+K_{v, i}\left[\sum_{j=1}^N a_{i, j}\left(\overline{\hat{v}}_i(t)-\overline{\hat{v}}_j(t)\right)+\right. \\ \left.\mathcal{S}_{i i}\left(\overline{\hat{v}}_i(t)\right)\right]+K_{a, i}\left[\sum_{j=1}^N a_{i, j}\left(\overline{\hat{a}}_i(t)-\overline{\hat{a}}_j(t)\right)+\right. \\ \mathcal{S}_{i i}\left(\overline{\hat{a}}_i(t)\right]+K_{I, i} \int_0^t\left[\sum_{j=1}^N a_{i, j}\left(\overline{\hat{p}}_i(s)-\overline{\hat{p}}_j(s)\right)+\right. \\ \left.\left.\mathcal{S}_{i i}\left(\overline{\hat{p}}_i(s)\right)\right] d s\right\}\end{gathered}$ (16)
Let define $\quad w_i=\int_0^t \overline{\hat{p}}_i(s) d s \quad$ and $\quad x_i(t)=$ $\left\lceil w_i(t), \overline{\hat{p}}_i(t), \overline{\hat{v}}_i(t), \overline{\hat{a}}_i(t)\right\rceil^T$, then the dynamics can be represented by:
$\dot{x}_i(t)=\left[\begin{array}{l}\overline{\hat{p}}_i(t) \\ \overline{\hat{v}}_i(t) \\ \overline{\hat{a}}_i(t) \\ \gamma(t)\end{array}\right]$ (17)
where,
$\begin{gathered}\gamma(t)=-\frac{1}{\tau_i}\overline{\hat{a}}_i(t)-\frac{1}{\tau_i} K_{p, i}\left[\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right) \overline{\hat{p}}_i(t)+\right. \\ \left.\sum_{j=1}^N a_{i, j} \overline{\hat{p}}_i(t)\right]-\frac{1}{\tau_i} K_{v, i}\left[\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right)\overline{\hat{v}}_i(t)+\right. \\ \left.\sum_{j=1}^N a_{i, j}\overline{\hat{v}}_i(t)\right]-\frac{1}{\tau_i} K_{a, i}\left[\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right)\overline{\hat{a}}_i(t)+\right. \\ \left.\sum_{j=1}^N a_{i, j} \overline{\hat{a}}_i(t)\right]-\frac{1}{\tau_i} K_{l, i}\left[\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right) w_i(t)+\sum_{j=1}^N a_{i, j} w_j(t)\right]\end{gathered}$ (18)
Since there is no self-loop in the graph, which means that ai,i=0, and by defining:
$\alpha_{1, i}=-\frac{1}{\tau_i} K_{I, i}\left[\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right)\right]$ (19)
$\alpha_{2, i}=-\frac{1}{\tau_i} K_{p, i}\left[\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right)\right]$ (20)
$\alpha_{3, i}=-\frac{1}{\tau_i} K_{v, i}\left[\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right)\right]$ (21)
$\alpha_{4, i}=-\frac{1}{\tau_i} K_{a, i}\left[\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right)\right]$ (22)
$\gamma_{i, j}=-\frac{1}{\tau_i} K_{I, i} a_{i, j}$ (23)
$\delta_{i, j}=-\frac{1}{\tau_i} K_{p, i} a_{i, j}$ (24)
$\vartheta_{i, j}=-\frac{1}{\tau_i} K_{v, i} a_{i, j}$ (25)
$\rho_{i, j}=-\frac{1}{\tau_i} K_{a, i} a_{i, j}$ (26)
and by defining x(t)=[x1(t), x2(t), …, xN(t)]T, the compact form of (17) is:
$\dot{x}(t)=\overline{A}x(t)=\left[\begin{array}{cccc}\overline{A}_{11} & \overline{A}_{12} & \cdots & \overline{A}_{1 N} \\ \overline{A}_{21} & \overline{A}_{22} & \cdots & \overline{A}_{2 N} \\ \vdots & \vdots & \vdots & \vdots \\ \overline{A}_{N 1} & \overline{A}_{N 2} & \cdots & \overline{A}_{N N}\end{array}\right] x(t)$ (27)
where,
$\overline{A}_{i i}=\left[\begin{array}{cccc}0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ \alpha_{1, i} & \alpha_{2, i} & \alpha_{3, i} & \alpha_{4, i}\end{array}\right]$ (28)
$\overline{A}_{i j}=\left[\begin{array}{cccc}0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ \gamma_{i, j} & \delta_{i, j} & \vartheta_{i, j} & \rho_{i, j}\end{array}\right]$ (29)
Remark 2: The novelty of the proposed control lies in the utilization of estimated values of the vehicle's position, velocity, and acceleration to generate a distributed PI control signal. Utilizing these estimated values is a way to address the incomplete full-state information of the vehicle. Furthermore, the study is conducted using a third-order model of the vehicle.
Theorem 1: Consider a heterogeneous vehicle platoon where the dynamics are described by Eqs. (1)-(2) and the observer as in Eq. (8) with the observer gains Eq. (10). Utilizing the distributed controller (13) with the controller gains satisfying:
$K_{p, i}>\max _i\left\{\sqrt{\left.\frac{\frac{4}{\tau_i} K_{I, i}}{1+\frac{1}{{K_{a, i}}^2}}\right\}}\right.$ (30)
$K_{v, i}>\max _i\left\{\frac{\left(K_{p, i}\right) \tau_i}{K_{a, i}\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right)}\right\}$ (31)
$K_{a, i}>0$ (32)
$K_{I, i}>0$ (33)
It is guaranteeing the asymptotic stability of the closed-loop dynamics of the heterogeneous vehicle platoon.
Proof:
Inspired by Manfredi et al. [29], let choose the Lyapunov candidate function as:
$V(x(t))=\frac{1}{2} x^T(t) x(t)$ (34)
The time derivative of V(x(t)) along Eq. (27) yields:
$\dot{V}(x(t))=x^T(t) \overline{A}x(t)$ (35)
It is clear that $\dot{V}(x(t))<0$ if matrix $\overline{A}$ is a negative definite matrix, which implies the asymptotic stability of Eq. (27). Matrix $\overline{A}$ is a strictly diagonally dominant block matrix, the negative definiteness of matrix $\overline{A}$ can be shown by proving that each block of $\overline{A}_{i i} \in \mathbb{R}^{4 \times 4}$ for $i=\{1,2, \ldots, N\}$ is a negative definite matrix. To ensure the asymptotic stability of $\overline{A}_{i i}$, the controller gains, $\left\{K_{p, i}, K_{v, i}, K_{a, i}, K_{I, i}\right\}$ can be obtained by finding the characteristic equation of matrix $\overline{A}_{i i}$ for all $i=\{1,2, \ldots, N\}$ and applying Routh-Hurwitz criterion. The characteristics equation of $\overline{A}_{i i}$ is:
$\operatorname{det}\left(\lambda I_{4 \times 4}-\overline{A}_{i i}\right)=\lambda^4-\alpha_{4, i} \lambda^3-\alpha_{3, i} \lambda^2-\alpha_{2, i} \lambda-\alpha_{1, i}$ (36)
By applying Routh-Hurwitz criterion, the condition for controller gains is obtained as follows:
$K_{p, i}>\sqrt{\frac{\frac{4}{\tau_i} K_{I, i}}{1+\frac{1}{K_{a, i}^2}}}$ (37)
$K_{v, i}>\frac{\left(K_{p, i}\right) \tau_i}{K_{a, i}\left(\sum_{j=1}^N a_{i, j}+\mathcal{S}_{i, i}\right)}$ (38)
$K_{a, i}>0$ (39)
$K_{I, i}>0$ (40)
Therefore, asymptotic stability of each $\overline{A}_{i i}$ for all $i=1,2, \ldots$, $N$ which implies $\dot{V}(x(t))<0$, can be guaranteed by selecting control gains as stated in inequalities (30) to (33).
This completes the proof.
Remark 3: In practice, tuning the parameters of a PI controller can be done with the following procedure:
(i) Select values for KI,i and Ka,i that satisfy conditions (33) and (22) respectively;
(ii) Using these values, calculate the limit value of Kp,i according to the condition stated in inequality (30), then choose a value for Kp,i that satisfies that condition;
(iii) Calculate the limit value of Kv,i according to condition (31), then choose a value for Kv,i that satisfies that condition;
(iv) Make adjustments to these values if necessary.
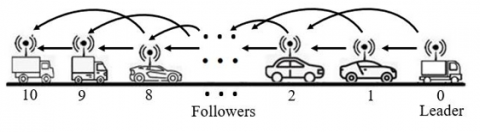
The effectiveness of the proposed control is demonstrated using a vehicle platoon employing the TPF topology, as illustrated in Figure 2. Eleven autonomous vehicles form a constant-spacing platoon, with the leading vehicle designated as the leader and the remaining ones as followers. Only the position and velocity of each follower are assumed to be obtained. The adjacency and pinning gain matrices for the topology are presented as follows:
$\mathcal{A}=\left[\begin{array}{llllllllll}0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 1 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 1 & 1 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 1 & 1 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 1 & 1 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 & 1 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 1 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 1 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 1 & 1 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 1 & 1 & 0\end{array}\right]$ (41)
$\mathcal{S}=\left[\begin{array}{llllllllll}1 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0 & 0\end{array}\right]$ (42)
Figure 2. Vehicle platoon with TPF topology
Heterogeneities of the vehicles are represented by distinct inertial time lags of the powertrain as follows: $\tau_0=0.6, \tau_1=0.25$, $\tau_2=0.27, \tau_3=0.3, \tau_4=0.7, \tau_5=0.6, \tau_6=0.4, \tau_7=0.35, \tau_8=0.3, \tau_9=0.25$ and $\tau_{10}=0.4$. The initial conditions of the vehicles and their estimated states are presented in Table 1, where the units for position, velocity, and acceleration are $[\mathrm{m}],[\mathrm{m} / \mathrm{s}]$, and $\left[\mathrm{m} / \mathrm{s}^2\right]$, respectively. The coupling gain, $c=1, Q=\operatorname{diag}\{1,1,1\}$ and $R=0.01$ for the observer are selected.
Table 1. Initial conditions of vehicles and their estimates
|
Vehicle (i) |
Initial Conditions |
|||||
|
pi |
vi |
ai |
$\hat{p}_i$ |
$\hat{v}_i$ |
$\hat{a}_i$ |
|
|
0 |
100 |
20 |
0 |
- |
- |
- |
|
1 |
90 |
18 |
0 |
88 |
17 |
0 |
|
2 |
75 |
19 |
0 |
77 |
20 |
0 |
|
3 |
66 |
21 |
0 |
67 |
22 |
0 |
|
4 |
50 |
17 |
0 |
48 |
18 |
0 |
|
5 |
42 |
20 |
0 |
41 |
21 |
0 |
|
6 |
32 |
18 |
0 |
33 |
18 |
0 |
|
7 |
22 |
22 |
0 |
20 |
21 |
0 |
|
8 |
13 |
19 |
0 |
14 |
20 |
0 |
|
9 |
7 |
18 |
0 |
8 |
19 |
0 |
|
10 |
0 |
19 |
0 |
1 |
17 |
0 |
Numerical simulations will be performed in the following scenarios. First, control parameters that do not satisfy the conditions in inequalities (30) to (33) will be selected to demonstrate the instability of the platoon. Afterward, the correct control parameters will be chosen to showcase the performance of the proposed control. Moreover, the performance of the proposed control will be tested when followers are subjected to constant disturbance and when the leader has a non-zero input.
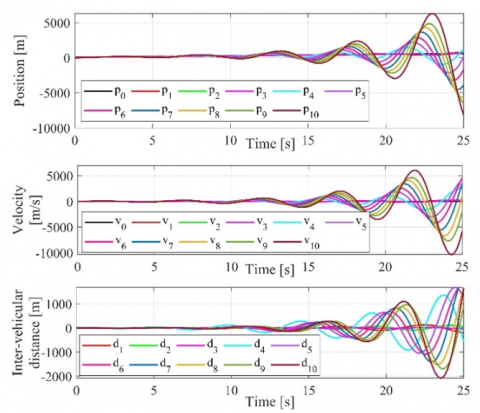
5.1 Non-compliant parameters
This scenario is implemented by selecting PI control parameters that do not satisfy the conditions of inequalities (30) to (33), as illustrated in Table 2. The simulation results in Figure 3 indicate that the platoon is in an unstable condition. These findings align with the observations in this study.
Table 2. Selection of non-compliant control parameters
|
Followers (i) |
Control Parameters |
|||
|
Kp,i |
Kv,i |
Ka,i |
KI,i |
|
|
1 |
2.5 |
0.5 |
1 |
1 |
|
2 |
2.5 |
0.5 |
1 |
1 |
|
3 |
2.5 |
0.5 |
1 |
1 |
|
4 |
2.5 |
0.5 |
1 |
1 |
|
5 |
2.5 |
0.5 |
1 |
1 |
|
6 |
2.5 |
0.5 |
1 |
1 |
|
7 |
2.5 |
0.5 |
1 |
1 |
|
8 |
2.5 |
0.5 |
1 |
1 |
|
9 |
2.5 |
0.5 |
1 |
1 |
|
10 |
2.5 |
0.5 |
1 |
1 |
Figure 3. Platoon instability
Table 3. Selection of appropriate control parameters
|
Followers (i) |
Control Parameters |
|||
|
Kp,i |
Kv,i |
Ka,i |
KI,i |
|
|
1 |
5 |
5 |
1 |
1 |
|
2 |
5 |
5 |
1 |
1 |
|
3 |
5 |
5 |
1 |
1 |
|
4 |
5 |
5 |
1 |
1 |
|
5 |
5 |
5 |
1 |
1 |
|
6 |
5 |
5 |
1 |
1 |
|
7 |
5 |
5 |
1 |
1 |
|
8 |
5 |
5 |
1 |
1 |
|
9 |
5 |
5 |
1 |
1 |
|
10 |
5 |
5 |
1 |
1 |
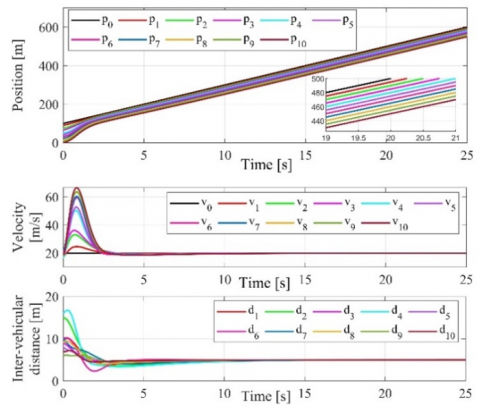
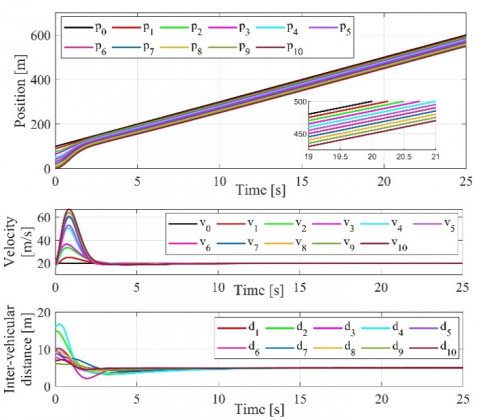
5.2 Appropriate control parameters
In this scenario, PI control parameters are tuned in accordance with the conditions specified in inequalities (30) to (33), with the final tuning results outlined in Table 3. The simulation results indicate the formation of the platoon, where all followers successfully synchronize inter-vehicle distance and velocity with the leader, as shown in Figure 4. These outcomes serve as verification for the findings of this study.
Figure 4. Platoon synchronization
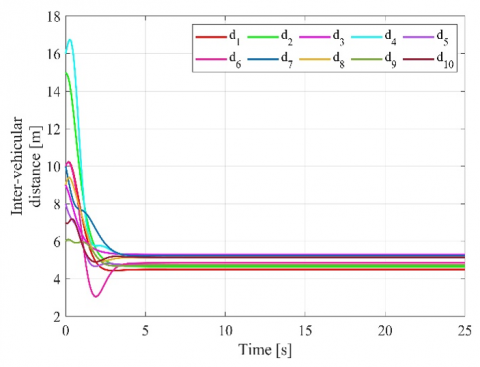
5.3 Performance testing: Followers under constant disturbance
In this scenario, it is assumed that each follower experiences a constant disturbance as indicated in the following equation:
$\left\{\begin{array}{l}\dot{p}_i(t)=v_i(t) \\ \dot{v}_i(t)=a_i(t) \\ \dot{a}_i(t)=-\frac{1}{\tau_i} a_i(t)+\frac{1}{\tau_i} u_i(t)+\frac{1}{\tau_i} \delta_i(t)\end{array}\right.$ (43)
Figure 5. Platoon synchronization under constant disturbance
This equation is also utilized by Zhu et al. [31] to analyze disturbances in the platoon. During the simulation, the disturbances for the followers are as follows: $\delta_1(t)=1, \delta_2(t)=2$, $\delta_3(t)=1, \quad \delta_4(t)=0.5, \quad \delta_5(t)=1.5, \quad \delta_6(t)=2, \quad \delta_7(t)=1, \quad \delta_8(t)=0.5$, $\delta_9(t)=1.5$ and $\delta_{10}(t)=1$. Meanwhile, control parameters are maintained according to Table 3. The simulation results in Figure 5 demonstrate that the PI control effectively guides each follower to sustain synchronization, forming the platoon configuration despite the constant disturbances.
To highlight the advantages of the proposed control, when the same case is addressed using only a proportional control scheme, as implemented by Prayitno et al. [23], the results reveal a failure to achieve synchronized inter-vehicle distance, as illustrated in Figure 6.
Figure 6. Performance of Prayitno et al.’s study [23] under constant disturbance
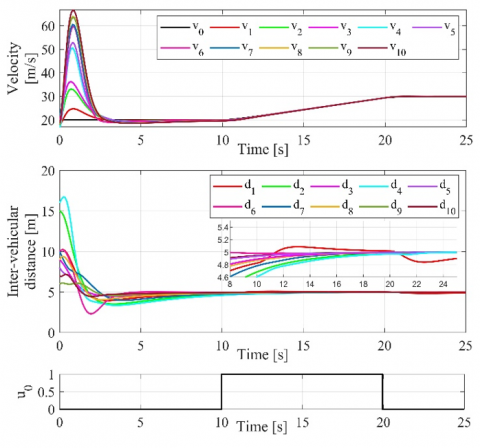
5.4 Performance testing: Non-zero input for platoon leader
In this scenario, the leader initially travels at a constant velocity of 20 m/s, then undergoes a constant acceleration of 1 m/s2 within the time range 10<t<20 seconds, after which the final velocity is maintained. From the test results as shown in Figure 7, it is observed that all followers are able to return to their pre-defined inter-vehicular distance. Furthermore, there is a noticeable reduction in overshoot from the first follower to the last follower.
Figure 7. Platoon synchronization when the leader moves with time-varying velocity
A distributed PI controller, utilizing a cooperative observer, is developed to synchronize the vehicle platoon with limited output information. The limitation of available information in the follower is addressed by employing the estimated full-state results using a cooperative observer, which utilizes the cooperative output estimation error. Subsequently, the proportional-integral control is implemented using the estimated results of the full state. To tune the PI control parameters, conditions have been formulated to guarantee the stability of the platoon. Furthermore, practical guidance for tuning has been described. The simulation results confirm the findings of this study and showcase the performance of the proposed distributed PI controller. Additionally, the controller's performance excels when followers experience constant disturbances, indicating the continuous achievement of vehicle platoon synchronization. This contrasts with the scenario where a distributed P controller scheme fails to achieve the same result. In future research, a more detailed vehicle model could be utilized, and distributed control could be implemented on actual test vehicles to enable empirical validation.
|
Ai |
matrix of ith vehicle dynamics |
|
ai(t) |
acceleration of ith vehicle, m. s-2 |
|
$\hat{a}_i(t)$ |
internal acceleration estimation, m. s-2 |
|
$\hat{a}_j(t)$ |
neighbors’ acceleration estimation, m. s-2 |
|
$\hat{a}_0(t)$ |
leader’s acceleration estimation, m. s-2 |
|
$\tilde{a}_i(t)$ |
acceleration estimation error, m. s-2 |
|
$\overline{\hat{a}}_i(t)$ |
acceleration tracking error of ith vehicle, m. s-2 |
|
$\overline{A}$ |
block matrix |
|
$\mathcal{A}$ |
adjacency matrix |
|
aij |
elements of the adjacency matrix |
|
Ci |
output matrix of ith vehicle |
|
c |
coupling gain |
|
d |
desired constant inter-vehicular distance between vehicle, m |
|
Fi |
observer gain of ith vehicle |
|
Kp,i |
proportional gain for the position of ith vehicle |
|
Kv,i |
proportional gain for the velocity of ith vehicle |
|
Ka,i |
proportional gain for the acceleration of ith vehicle |
|
KI,i |
integral gain of ith vehicle |
|
Pi |
solution of the observer algebraic Riccati equation (ARE) |
|
pi(t) |
position of ith vehicle, m |
|
$\hat{p}_i(t)$ |
internal position estimation, m |
|
$\hat{p}_j(t)$ |
neighbors’ position estimation, m |
|
$\hat{p}_0(t)$ |
leader’s position estimation, m |
|
$\tilde{p}_i(t)$ |
position estimation error, m |
|
$\overline{\hat{p}}_i(t)$ |
position tracking error of ith vehicle, m |
|
Q |
positive definite matrix |
|
R |
positive definite matrix |
|
t |
time, s |
|
ui(t) |
control signal of ith vehicle |
|
V |
Lyapunov candidate function |
|
vi(t) |
velocity of ith vehicle, m.s-1 |
|
$\hat{v}_i(t)$ |
internal velocity estimation, m.s-1 |
|
$\hat{v}_j(t)$ |
neighbors’ velocity estimation, m.s-1 |
|
$\hat{v}_0(t)$X |
leader’s velocity estimation, m.s-1 |
|
$\tilde{v}_i(t)$ |
velocity estimation error, m.s-1 |
|
$\overline{\hat{v}}_i(t)$X |
velocity tracking error of ith vehicle, m.s-1 |
|
xi(t) |
stack vectors of ith vehicle |
|
yi(t) |
output of ith vehicle |
|
Greek symbols |
|
|
δi(t) |
disturbance of ith vehicle |
|
$\mathcal{E}$ |
a set of connections between the followers |
|
$\mathcal{G}$X |
graph |
|
$\mathcal{N}$ |
a set of followers |
|
$\varphi_i(t)$ |
the cooperative tracking output estimation error, m |
|
$\mathcal{S}$ |
pinning gain matrix |
|
$\mathcal{S}_{11}$ |
diagonal elements of the pinning gain matrix |
[1] Li, Q., Chen, Z., Li, X. (2022). A review of connected and automated vehicle platoon merging and splitting operations. IEEE Transactions on Intelligent Transportation Systems, 23(12): 22790-22806. https://doi.org/10.1109/TITS.2022.3193278
[2] Fakhfakh, F., Tounsi, M., Mosbah, M. (2020). Vehicle platooning systems: Review, classification and validation strategies. International Journal of Networked and Distributed Computing, 8(4): 203-213. https://doi.org/10.2991/ijndc.k.200829.001
[3] Zheng, Y., Li, S.E., Wang, J., Cao, D., Li, K. (2016). Stability and scalability of homogeneous vehicular platoon: Study on the influence of information flow topologies. IEEE Transactions on Intelligent Transportation Systems, 17(1): 14-26. https://doi.org/10.1109/TITS.2015.2402153
[4] Zheng, Y., Bian, Y., Li., S., Li, S.E. (2021). Cooperative control of heterogeneous connected vehicles with directed acyclic interactions. IEEE Intelligent Transportation Systems Magazine, 13(2): 127-141. https://doi.org/10.1109/MITS.2018.2889654
[5] Zheng, Y., Li, S.E., Li, K., Wang, L.Y. (2016). Stability margin improvement of vehicular platoon considering undirected topology and asymmetric control. IEEE Transactions on Control Systems Technology, 24(4): 1253-1265. https://doi.org/10.1109/TCST.2015.2483564
[6] Zheng, Y., Li, S.E., Li, K., Ren, W. (2018). Platooning of connected vehicles with undirected topologies: Robustness analysis and distributed H-infinity controller synthesis. IEEE Transactions on Intelligent Transportation Systems, 19(5): 1353-1364. https://doi.org/10.1109/TITS.2017.2726038
[7] Razzaghpour, M., Mosharafian, S., Raftari, A., Velni, J. M., Fallah, Y.P. (2022). Impact of information flow topology on safety of tightly-coupled connected and automated vehicle platoons utilizing stochastic control. 2022 European Control Conference (ECC), London, United Kingdom, pp. 27-33. https://doi.org/10.23919/ECC55457.2022.9837992
[8] Qiang, Z., Dai, L., Chen, B., Li, K., Xia, Y. (2023). Distributed model predictive control for heterogeneous vehicle platoon with unknown input of leading vehicle. Transportation Research Part C: Emerging Technologies, 155: 1-20. https://doi.org/10.1016/j.trc.2023.104312
[9] Li, Y., Qin, Z., Zhu, H., Peeta, S., Gao, X. (2022). Platoon control of connected vehicles with heterogeneous model structures considering external disturbances. Green Energy and Intelligent Transportation, 1(3): 1-9. https://doi.org/10.1016/j.geits.2022.100038
[10] Gaagai, R., Horn, J. (2023). Constrained distributed consensus control of homogeneous vehicle platoons with bidirectional communication. Control Engineering Practice, 140: 1-15. https://doi.org/10.1016/j.conengprac.2023.105690
[11] Wijnbergen, P., Jeeninga, M., Besselink, B. (2021). Nonlinear spacing policies for vehicle platoons: A geometric approach to decentralized control. Systems & Control Letters, 153: 1-9. https://doi.org/10.1016/j.sysconle.2021.104954
[12] Besselink, B., Johansson, K.H. (2017). String stability and a delay-based spacing policy for vehicle platoons subject to disturbances. IEEE Transactions on Automatic Control, 62(9): 4376-4391. https://doi.org/10.1109/TAC.2017.2682421
[13] Lewis, F.L., Zhang, H., Movric, K.H., Das, A. (2014). Cooperative control of multi-agent systems optimal and adaptive design approach. Springer Science & Business Media.
[14] Prayitno, A., Nilkhamhang, I. (2022). Distributed model reference control for cooperative tracking of vehicle platoons subjected to external disturbances and bounded leader input. International Journal of Control, Automation and Systems, 20(6): 2067-2080. https://doi.org/10.1007/s12555-021-0171-4
[15] Prayitno, A., Nilkhamhang, I. (2021). Distributed model reference adaptive control for vehicle platoons with uncertain dynamics. Engineering Journal, 25(8): 173-185. https://doi.org/10.4186/ej.2021.25.8.173
[16] Hu, J., Bhowmick, P., Arvin, F., Lanzon, A., Lennox, B. (2020). Cooperative control of heterogeneous connected vehicle platoons: An adaptive leader-following approach. IEEE Robotics and Automation Letters, 5(2): 977-984. https://doi.org/10.1109/LRA.2020.2966412
[17] Harfouch, Y.A., Yuan, S., Baldi, S. (2018). An adaptive switched control approach to heterogeneous platooning with intervehicle communication losses. IEEE Transactions on Control of Network Systems, 5(3): 1434-1444. https://doi.org/10.1109/TCNS.2017.2718359
[18] Zhou, Y., Wang, M., Ahn, S. (2019). Distributed model predictive control approach for cooperative car-following with guaranteed local and string stability. Transportation Research Part B, 128: 69-86. https://doi.org/10.1016/j.trb.2019.07.001
[19] Zhao, W., Yu, W., Zhang, H. (2019). Observer-based formation tracking control for leader–follower multi-agent systems. IET Control Theory & Applications, 13: 239-247. https://doi.org/10.1049/iet-cta.2018.5443
[20] Yan, C., Fang, H. (2021). Observer-based distributed leader-follower tracking control: A new perspective and results. International Journal of Control, 94(1): 39-48. https://doi.org/10.1080/00207179.2019.1580770
[21] Prayitno, A., Indrawati, V., Nilkhamhang, I. (2022). Distributed model reference adaptive control based on cooperative observer with optimal control modification for synchronization of heterogeneous vehicle platoon. Mathematical Modelling of Engineering Problems, 9(6): 1565-1573. https://doi.org/10.18280/mmep.090616
[22] Prayitno, A., Indrawati, V., Nilkhamhang, I. (2023). Distributed model reference control for synchronization of a vehicle platoon with limited output information and subject to periodical intermittent information. International Journal of Applied Mathematics and Computer Science, 33(4): 537-551. https://doi.org/10.34768/amcs-2023-0039
[23] Prayitno, A., Nilkhamhang, I. (2021). V2V network topologies for vehicle platoons with cooperative state variable feedback control. In 2021 Second International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics (ICA-SYMP), Bangkok, Thailand, pp. 1-4. https://doi.org/10.1109/ICA-SYMP50206.2021.9358435
[24] Andreasson, M., Dimarogonas, D.V., Sandberg, H., Johansson, K.H. (2014). Distributed control of networked dynamical systems: Static feedback, integral action and consensus. IEEE Transactions on Automatic Control, 59(7): 1750-1764. https://doi.org/10.1109/TAC.2014.2309281
[25] Gionfra, N., Sandou, G., Siguerdidjane, H., Faille, D. (2017). A distributed PID-like consensus control for discrete-time multi-agent Systems. In the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Madrid, Spain. https://doi.org/10.5220/0006420500720081
[26] Burbano Lombana, D.A., di Bernardo, M. (2015). Distributed PID control for consensus of homogeneous and heterogeneous networks. IEEE Transactions on Control of Network Systems, 2(2): 154-163. https://doi.org/10.1109/TCNS.2014.2378914
[27] Lui, D.G., Petrillo, A., Santini, S. (2022). Leader tracking control for heterogeneous uncertain nonlinear multi-agent systems via a distributed robust adaptive PID strategy. Nonlinear Dynamics, 108: 363-378. https://doi.org/10.1007/s11071-022-07240-w
[28] Lv, Y., Li, Z., Duan, Z. (2020). Distributed PI control for consensus of heterogeneous multiagent systems over directed graphs. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 50(4): 1602-1609. https://doi.org/10.1109/TSMC.2018.2792472
[29] Manfredi, S., Petrillo, A., Santini, S. (2020). Distributed PI control for heterogeneous nonlinear platoon of autonomous connected vehicles. IFAC-PapersOnLine, 53(2): 15229-15234. https://doi.org/10.1016/j.ifacol.2020.12.2307
[30] Hou, K., Zheng, F., Liu, X., Fan, Z. (2024). Cooperative vehicle platoon control considering longitudinal and lane-changing dynamics. Transportmetrica A: Transport Science, 20(3): 2182143. https://doi.org/10.1080/23249935.2023.2182143
[31] Zhu, J.W., Yang, G.H., Zhang, W.A., Yu, L. (2017). Cooperative tracking control for linear multi-agent systems with external disturbances under a directed graph. International Journal of Systems Science, 48(13): 2683-2691. https://doi.org/10.1080/00207721.2017.1347304