Yeldos Korabayev*![]() | Serikbai Kosbolov
| Serikbai Kosbolov![]() | Gulnar Kubesova
| Gulnar Kubesova![]() | Marat Shurenov
| Marat Shurenov![]() | Kulzada Duisebayeva
| Kulzada Duisebayeva![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The subject's relevance stems from the rapid advancement of science and technology, which drives the extensive utilization of controlled mobile robot models with manipulators across diverse domains. The study aims to explore the development of versatile mobile robotic devices using manipulators for space applications, drawing from the expertise of specialists at Almaty University of Power Engineering and Telecommunications. The methodological approach is based on a combination of methods of system analysis of the principles of building a highly functional model of a mobile robot made based on manipulation devices, with an analytical study of the main directions of using mobile robots in the space sphere. The study underscores designing space mobile robots based on human body dynamics, stressing the necessity of robust mathematical models and specialized software, meeting stringent reliability, simplicity, and safety criteria. The findings underscored the critical role of manipulator-based mobile robot modeling in space technology development, offering practical insights for developers in various technological fields, including aerospace. The practical implications of the research include the possibility of developing and implementing reliable and efficient manipulative mobile robots for use in space, which will help to increase the efficiency of space operations and reduce risks to humans.
space technology, robotic technology, multifunctional model, control model, autonomous robotic systems, robot manipulator
The problem of creating multifunctional mobile robots based on manipulation devices is relevant in various branches of modern technology. At the same time, this issue has been covered comparatively superficially in the scientific literature. The currently available scientific publications on the study of the challenges of constructing and deploying moving robots mostly contain general information that does not fully reflect the degree of research on the problem. Glebov et al. [1] in their study considered the issues of interactive control of tracked mobile robots. Scientists note that interactively controlled robots and manipulators are widely used in numerous spheres of human activity. At the same time, the efficiency and quality of operations of robotic devices depend to a large extent on how well they are coordinated with other process equipment in the workplace. Changing conditions in the work area requires adaptation of the robot itself in its software control. The formalised description of the environment of the robot's workspace, which is necessary when programming robot actions under non-deterministic workspace conditions, is quite challenging [2, 3]. This determines the high efficiency of interactive supervisory management during the period of atypical operations. The authors point out the importance of interactive control of mobile robots, which may require improving control systems and operator-robot interaction, which confirms the opinion expressed in this study.
A number of problematic aspects of the development of a mobile robot were considered in a study by Bulgakov et al. [4]. The authors draw attention to the fact that the quality of movement of mobile robots is of particular importance in this context, as the most important aspect of assessing their operational efficiency. Researchers point out that mobile robot motion planning is a major challenge to the effective functioning of autonomous robotic systems and one of the most intensively developed areas of current scientific and practical knowledge. Solving the problem of planning the movement of a robot covers issues related to scientific fields such as artificial intelligence, computational geometry, computer modelling and automatic control theory [5-7]. Consequently, the problem of creating a mobile robot based on manipulation devices must be solved by applying knowledge from various branches of modern science and technology.
The subject is elaborated on by Kershin and Yergaliyev [8], in a study of the principles of navigation and control of a mobile robot. They argue that today's mobile robots have the ability to move independently in their environment and can perform various actions with the help of manipulators. The robot is equipped with a vision system and a set of information sensors necessary to form a comprehensive view of the current situation [9]. The robot's knowledge base allows it to independently navigate the environment and make decisions about actions necessary to solve specific tasks. Thus, a manipulative mobile robot is an "intelligent" technical system that has the ability to behave autonomously [10]. However, a human operator is still expected to be involved in the control of the robot for the bulk of the tasks performed under undefined conditions and associated with a high "cost" of error for incorrect actions.
In turn, Mikhaylov et al. [11], in a study on the navigation and control of autonomous robots, point out that manipulation devices are necessary for modern robots to be able to move independently in space and perform necessary actions. The robot is equipped with a vision system and a complex of information sensors that give it a clear idea of the external situation [12]. The formed knowledge base of the robot allows it to navigate independently in the environment and make decisions about the actions necessary to solve the task. A modern manipulative robot is a technical, highly intelligent system that is capable of fully autonomous behaviour. The authors emphasize the importance of manipulative devices for work in space, which supports the idea of researching the creation of mobile robots for use in space operations, which is highlighted in this study. A number of challenges in the construction of robotic platforms are addressed in a study by Yevdokimova et al. [13]. Researchers have concluded that autonomous robotic systems are one of the fastest-growing branches of robotics today. A distinctive feature of such systems is the possibility of independent orientation in the surrounding space [14]. More often than not, an accurate and detailed map of the terrain is not available, which is why an actively developing area of modern science should be the construction of an autonomous map of an unknown terrain by a robot [15]. At the same time, the robot needs to save all the required information about the objects of the scene. Subsequently, this information can be used to solve various tasks by the robot in the studied area of space [16].
In previous studies, researchers have overlooked several important aspects. Detailed algorithms for robot motion planning in complex environments, as well as the implications of using artificial intelligence and automatic control systems in the navigation of mobile robots were not considered. In addition, the interaction of robots with unpredictable external conditions and their performance in such scenarios were not considered. The studies also did not take into account ergonomic considerations and the dynamics of human-robot interaction in space.
This study addresses these gaps by introducing advanced algorithms for navigating robots in complex environments, integrating artificial intelligence and automatic control systems to increase their autonomy. The research also involves the interaction of robots with unpredictable external conditions and the evaluation of their performance in such environments. The ergonomics and interaction of humans and robots in space were thoroughly studied, and measures were proposed to reduce the risks involved. In addition, we will investigate the problems of programming robots in non-deterministic environments and analyze their interaction with other equipment in the workplace to assess their overall performance.
The main purpose of this study is to investigate the advancement of adaptable mobile robotic devices equipped with manipulators for use in space, leveraging the expertise of specialists from Almaty University of Power Engineering and Telecommunications.
The methodology of this study is based on a combination of methods of system analysis of the basic principles of constructing a highly functional model of a mobile robot based on manipulation devices and an analytical investigation of the currently most relevant and promising applications of mobile robots in the space domain. The theoretical basis is formed by studies of a number of Kazakh and, mainly, authors from other countries, who have conducted research into various problematic aspects of modelling mobile robots based on manipulation devices, in various branches of modern science and technology, including the space domain. A systematic analysis made it possible to determine the meaning of the technical term "mobile robot" and to highlight its key features. In addition, the analysis has provided a schematic representation of the mobile robot model, indicating the main units and systems that are critical to its performance. The above combination of the chosen methods of study determined the following phases of the completed investigation.
In the initial phase, the concept of a "mobile robot" was defined and its distinctive features were identified. A functional model of the technical device was drawn up and a detailed analysis of all its systems was carried out. The mechanical handling unit, which is the most important in terms of ensuring the movement of the mobile robot in space and the high quality of the operations it performs, is considered separately. In addition, the key differences between the manipulators that are used in the creation of mobile robots are identified and determine the features of their functioning in various branches of modern technology, including space.
The next step was to draw a parallel between the principles of functioning of the mobile robot, in the context of existing analogies with the human body. The study presents a schematic representation of the functioning of the main systems of the human body, laid down by specialists of the Almaty University of Power Engineering and Telecommunications named after Gumarbek Daukeyev, as a basis for developing a model of a mobile robot that functions on the basis of manipulation devices and is designed to work in outer space. Correspondences between the functions of individual systems of the human body and the functions of the developed robotic model are derived. A diagram for the design of mathematical models of mobile robots based on manipulation devices, using the potential of modern computer technology, is also presented. The basic requirements for manipulating devices intended for use in space robotics for the creation of effective mobile models of robotic manipulators are determined. This stage also provides an example of the calculation of a mobile robot designed for use in space.
A variety of data sources were used for this study, including scientific articles, technical reports, documentation on the production of mobile robots, as well as the results of previous studies on this topic. The literature review was carried out in online libraries, databases, and academic journals in mechatronics, robotics, and space technology. As for the experimental setup, the study involved theoretical modelling and analysis based on mathematical models. For this purpose, specialized software tools for working with robotic systems and mathematical modelling were used. Statistical analysis was conducted on the basis of numerical data obtained as a result of calculations and modelling of various parameters of mobile robots. For example, comparing speeds or changes in robot parameters depending on their design and purpose. For this purpose, statistical methods such as analysis of variation and comparative data analysis were used.
This study concludes with an analytical comparison of its findings with the results and conclusions of other researchers who have investigated the subject of mobile robot modelling. This allowed the results of this study to be elaborated and expanded, while at the same time forming the conclusions as a logical reflection thereof, summarising the entire body of investigation that had been carried out.
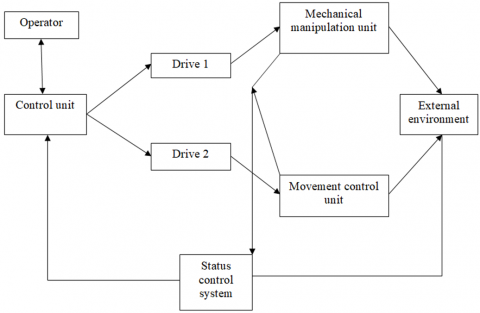
The practical application of mobile robots created on the basis of manipulation devices involves the simultaneous participation of several devices of this type in robot control. The theory of manipulation control of mobile robots is still in its early stages, but some results have already been achieved. Modelling of mobile robots based on manipulation devices implies a clear formulation of the notion of a 'mobile robot' as a versatile, sophisticated automatic device designed to perform a set of complex operations in continuous motion and alternating with static ones, similar to the actions of a human performing physical work [17]. According to the above definition, the distinctive features of the robot should be considered: ability to interact with the environment; autonomy when performing work operations; versatility in control and the ability to change the operating mode. Figure 1 shows a schematic of a working model of a mobile robot made with manipulation devices [18].
Figure 1. Functional diagram of a mobile robot model based on manipulation devices
The diagram shown in Figure 1. includes three main blocks:
1. Information and control system (control unit and operator).
2. Functional system (drive system, motion control units and mechanical manipulation).
3. Sensor system (status monitoring system).
The information and control system are designed to directly control the actions of a mobile robot. The operator is in direct contact with the control unit, coordinating all work operations and making decisions directly related to the implementation of certain manipulations using appropriate devices. The functional system includes control units for the movement of the mobile robot and a system of driving devices (drives) to ensure high-quality transmission of guiding forces to various work sites. A separate role in the functional system is assigned to the mechanical manipulation unit, as the most important system responsible for the position of the mobile robot in space, its characteristics and movement parameters, the change of working positions, directing efforts in the executive system, as well as the nature of interaction with objects of the external environment. The mechanical manipulation unit is designed to provide operations for manipulating the movements of a mobile robot in space [19]. It includes a system of manipulators with a number of classification differences in the following parameters:
– load capacity (determined by the amount of maximum load the mobile robot is required to handle);
– accuracy of work operations (cyclicity, repeatability, positioning, resolution);
– the speed of work operations (operating limits of permissible speeds and accelerations);
– design features determined by the shape and size of the working area and the coordinate system used (angular, spherical, rectangular, cylindrical).
The sensor system (condition monitoring system) has the function of monitoring the mobile robot's operating parameters in a timely manner, using the appropriate sensors. By the nature of the measured values, sensors are divided into three main groups:
1. Determining the position of the mobile robot in space, the nature of interaction with objects of the external environment, the main parameters of movement (direction and speed), and efforts in the manipulation system.
2. Determining the key characteristics of the environment (temperature sensors, light, rangefinders, sound, humidity, temperature).
3. Providing a general picture of the external space around the mobile robot (video cameras, thermal imagers, scanning devices of the surrounding space).
Today, the development of mobile robots based on manipulator systems for large-scale space exploration tasks is one of the key areas of science and technology development. Space operations require special models of advanced equipment capable of efficiently performing technical tasks unavailable to humans due to the high concentration of substances hazardous to health and life in space [20]. Modelling of mobile robots based on handling devices, for their subsequent use in the space domain, in the long term involves the creation of devices for solving the following tasks:
1. Performing maintenance work on artificial satellites, including installation of individual devices and objects in near-Earth orbit, and cleaning of near-Earth space from debris.
2. Work on orbital space stations with operations that are inaccessible to humans.
3. Operating on the surface of other planets and various space objects.
This makes it possible to distinguish three main types of mobile space robots:
– service providers designed to work in spacecraft;
– on-planet, designed to work on the surfaces of the studied planets or cosmic bodies;
– free-flyers, designed for conducting research in outer space [17].
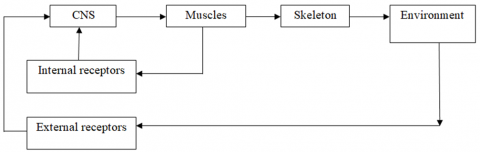
Mobile space robots, and operator-controlled devices equipped with non-automated or semi-automated manipulators, are fitted with electromechanical actuators. Such devices have significantly less drive power than their terrestrial counterparts, due to weight-saving considerations for a robot operating in a space environment. This inevitably entails a reduction in the performance of mobile robots due to the reduction in acceleration when moving space objects, which have a certain inertia. Mobile robots designed to operate on the surfaces of planets or other space objects have interchangeable gripping devices and TV cameras on the arms of manipulators. These are used to monitor the operations performed and to collect data on the current state of the space objects in question. Thus, mobile robotic manipulators used in the space domain perform, in addition to their primary function of providing grasping of objects, a research support function. The foundation for the work on the modelling of mobile robotic manipulators for their use in the space sphere by the Almaty University of Power Engineering and Telecommunications named after Gumarbek Daukeyev was the functional diagram of the human body motion control system [17]. This diagram is shown in Figure 2.
The human body's movement control system includes a stationary part (skeleton), a moving part (muscles), sensory receptors and a control system whose function is performed by the central nervous system (CNS). A similar diagram is applied in the construction of a functional model of a mobile robot based on manipulation devices. In a model of this kind, the information and control system (control unit and operator) acts as the stationary part, the moving part is represented directly by the mechanical manipulation unit, and the control system for the moving robot is similar to the control system shown in Figure 2. The robotic manipulators that are currently used in the space sector are based on a similar diagram.
Figure 2. Diagram of functioning of the human body motion control system
The manipulators utilized in modelling mobile robots for space applications predominantly belong to the category of mechanical manipulation systems. These manipulators are essentially spatial mechanisms, often depicted in the form of open or closed kinematic diagrams. These diagrams consist of interconnected links that establish kinematic pairs, facilitating both angular and translational relative motion. Typically, these manipulators exhibit one to two degrees of mobility, allowing for versatile movement patterns. A distinctive feature of these manipulators is their segregated drive system, allocated for each degree of mobility. This design ensures precise control over the manipulator's motion and enhances its adaptability to various tasks in the space environment. At the extremity of the manipulator lies the implement, which serves as the endpoint for executing specific actions or tasks [21]. Manipulators with two degrees of arm movement are used in the space domain: orienting; portable. Manipulative devices with a portable degree of mobility of the manipulator are able to move within the entire working area of the manipulator, and devices with an orienting degree of mobility have the ability to navigate in space. At least three different degrees of mobility are required for the arm to move freely anywhere in the workspace. To work in real space conditions, modern manipulative devices of mobile robots are equipped with 4-6 or 8-9 degrees of mobility.
In addition to the benefits mentioned above, the modular construction principle in mobile robotic systems offers advantages in terms of adaptability and scalability. By breaking down the system into smaller, interchangeable modules, engineers can easily customize and upgrade the robot's capabilities to suit specific mission requirements without the need for a complete redesign. This flexibility is particularly valuable in dynamic and evolving space exploration scenarios where new tasks and challenges may arise [21]. The introduction of automated control systems enhances the overall efficiency and reliability of mobile robotic operations. These systems can continuously monitor the robot's performance, adjust parameters in real-time, and even anticipate potential issues before they occur. By integrating feedback mechanisms and intelligent algorithms, automated control systems optimize resource utilization and minimize the risk of mission failure due to human error or unforeseen circumstances. Moreover, mathematical modelling plays a crucial role in the development and optimization of mobile robotic systems. Through simulation and analysis, engineers can explore different design configurations, evaluate performance under various conditions, and refine control strategies. This iterative process not only accelerates the development cycle but also enables the identification of potential weaknesses and areas for improvement early on, ultimately leading to more robust and capable robotic platforms. Overall, the combination of modular construction, automated control systems, and mathematical modelling represents a powerful approach to the design and operation of mobile robotic systems for space exploration. By leveraging these tools and techniques, engineers can overcome the challenges of operating in remote and harsh environments, paving the way for new discoveries and advancements in our understanding of the universe [22].
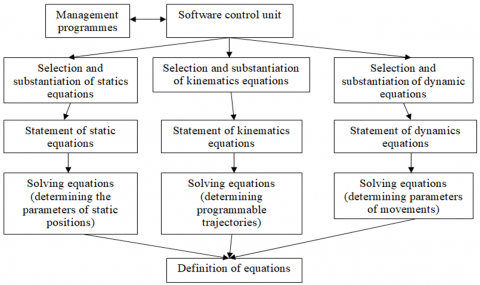
Figure 3. Software diagram for modelling mobile robotic systems based on manipulation devices
All these tasks are solved during the design phase of the mobile robot. This is necessary to ensure the high accuracy of the created mathematical model of a mobile robot based on manipulators with a real sample, which will later be put into operational use. Figure 3 shows a software diagram for modelling mobile robotic systems based on manipulation devices.
The process of modelling a mobile robot based on manipulation devices is predicated on the creation of a computer model that clearly describes the object in question by a system of equations reflecting changes in the movement parameters of the mobile robot over time. Figure 3 shows a generalised diagram of the software packages for describing the manipulator process. The sequence of deriving equations describing the nature of the mobile robot's movement in space is shown schematically. Thus, mobile robot models that function by using manipulation devices in their design must meet the following requirements:
– the reliability of the models created, their ability to function for long periods of time in space conditions where human participation is not possible;
– the relative simplicity of the design of the manipulating device and the possibility of its quick replacement in case of failure;
– the ability to significantly increase the overall efficiency of space systems, reduce the cost of their operation, increase the resource of use and expand the functionality of modern spacecraft;
– ensuring the safety of astronauts.
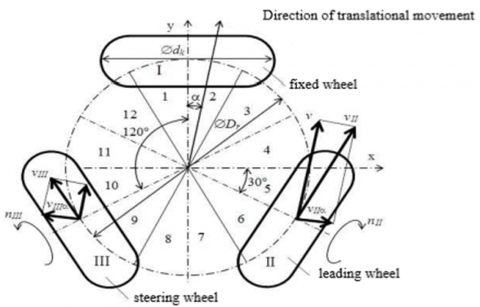
Among the many varieties of land mobile robots, the robotic arm with three driving wheels, which are arranged at an angle of 120°, is of significant interest. A robot with such a kinematic mechanism has the advantage of manoeuvrability, as it can move in any direction at any time. Maneuverability is enhanced by equipping the robot with three wheels of a special design (omnicycles), which provide rolling friction with the surface on which the robot moves in two directions perpendicular to each other. All driving wheels are independent, the robot is controlled by changing the speeds of their rotation. At the same time, it is difficult to determine the rotation frequency of each wheel, which determines the speed of the robot manipulator in the selected direction of movement [23]. Figure 4 shows an illustration of the wheel speeds of a planetary mobile robot manipulator.
Figure 4. Illustration of wheel speeds when moving a mobile robot manipulator [23]
Calculation of the motion of a planetary mobile robot manipulator. As an example, the mobile robot moves in the direction of the area shown in Figure 4 as number 2. The clockwise speed of the wheel is assumed to be positive. In this case, the relationship between the value of the drive wheel speed V1 and the total speed V can be represented as:
$V_1=\frac{V}{\cos (60-\alpha)}$ (1)
where: α is the angle between the wheels.
The condition of equality of velocities V2 = -V2 must be met, the tangential velocity of the thruster wheel can be represented as:
$V_2=\frac{V \times \sin (60-\alpha)}{\cos (60-\alpha) \times \cos (30-\alpha)}$ (2)
After that, it is possible to calculate the speeds of the driving N1 steering N2 wheels:
$N_1=\frac{1000 \times V 1}{\Pi \times d}$ (3)
$N_2=\frac{1000 \times V}{\Pi \times d}$ (4)
where, d is the diameter of the wheel.
For all other zones of motion of the mobile robot-on-plane, the wheel speeds are calculated according to a similar scheme [23]. A human, as the operator of a functioning mobile robot, can intervene in its control at any stage or level of functioning [24]. At the same time, the control can be either group, involving simultaneous, connected control of several independent robot manipulators, or private, aimed at controlling one object. A change in the accepted control paradigm may consist in changes in the set parameters of the robot's movement or its interaction with other objects, activation of an auxiliary algorithm of actions intended for use in any change in the situation. It is also possible for the operator to intervene at the stage of planning the subsequent actions of the robot manipulator, which implies the possibility of preventing the occurrence and development of emergency situations even before using the robot.
Vokhmintsev and Pachganov [25] focused on developing an algorithm for simultaneous navigation and mapping by a mobile robot. Their research emphasized the importance of robust navigation algorithms utilizing visual features and depth information. They concluded that such algorithms are essential for creating high-quality models of mobile robots equipped with manipulators. Their findings align with our investigation, which underscores the significance of integrating reliable navigation systems into mobile robot designs. The authors stressed the necessity of thoroughly preparing mobile robots for use, echoing our emphasis on the importance of incorporating robust navigation devices. In turn, Walsh and Strano [26] conducted a study on the key principles of building robotic systems and autonomous automatic platforms that are controlled remotely. According to the authors, the use of modern methodologies and materials for the manufacture of new and improvement of already functioning robotic autonomous systems should be carried out under careful control at all stages of work, and control measures should comply with approved standards. The authors believe that advances in robotics have the potential to significantly extend the capabilities of modern robotic and autonomous systems. Similarly, the research by authors underscores the importance of meticulous control measures and adherence to approved standards in the development and improvement of robotic systems, which aligns with emphasis on the need for thorough preparation and integration of navigation devices into mobile robot designs.
The subject is further developed by Rosen [27] in a study of existing principles for the development of portable robotics. The scientist notes that the current pace of development of science and technology makes it possible to create high-tech devices, the effectiveness of which can only be determined practically. In particular, a comparison of mass, control complexity, and command responsiveness is required to evaluate the effectiveness of various aspects of robot systems with upper limbs. The researcher's conclusions are complementary to the results of this research work, as they clarify the parameters for the practical application of mobile robots and emphasise the importance of accurate manipulator execution of operator commands received by the manipulators. The study emphasizes the practical evaluation of robot systems, particularly in terms of mass, control complexity, and responsiveness, which complements investigation by shedding light on the parameters crucial for the practical application of mobile robots.
Nenchev et al. [28] conducted a study on the principles of modelling and control of humanoid robots. Researchers conclude that the designer's imagination plays a crucial role in creating effective models of mobile robots. In addition, the development of humanoid robot technology is stimulating various branches of modern engineering, as many governments are now intensively funding advanced developments in robotics [29-31]. The researchers' conclusion is debatable because the effectiveness of robotic manipulators used in the space industry is influenced by many factors that are not directly dependent on the designer's imagination.
These findings echo those of Tzafestas [32], who investigated the principles of ensuring the control of mobile robots. According to the scientist, the manufacture of a mobile robot involves the creation of a whole system of kinetic and dynamic sensors to monitor its condition, as well as motion controllers. The author notes that the functional reliability of the interaction of peripheral control devices ensures the reliable operation of the model as a whole. Highlights the critical role of sensor systems in ensuring the functional reliability of mobile robots, a point that resonates with emphasis on the importance of sensor functions for assessing the robot's state during operation. The key principles of building mobile robot models are investigated by Jaulin [33]. The scientist concludes that the development of mobile robots requires the development of a multitude of control nodes and tools to ensure that automatic robotic systems function at a high level of quality. At the same time, the effectiveness of control is ensured by the use of a system of tests that determine the current state of the model at a given time [34]. There are no direct contradictions to the results of this study in the author's conclusions, however, tests do not always objectively demonstrate the state of a mobile robot operating in a vacuum of space.
Klancar et al. [35] delved into the challenges associated with constructing wheeled mobile robots. They concluded that achieving high-quality workflow planning for mobile robot production requires careful consideration of all aspects of robot-control arm design. Additionally, they highlighted that the mobility of robots is heavily influenced by the quality of manipulations carried out throughout the workflow stages. This finding resonates with our study, which similarly evaluates the precision of replicating human movements by robot manipulators. A similar conclusion was drawn by Nikolakopoulos et al. [36], who investigated the issues of building robots to perform work in the airspace. Researchers point out that the effective operation of aerial robotic workers is impossible without the preparation of hardware and software components that enable effective manipulation of off-the-shelf models. Furthermore, according to the authors, it is the quality of the manipulation systems that ensures the high performance of aerial robotic workers, which almost echoes the view of Klancar et al. [35] and is essentially the same as the results obtained in this research study.
Huang et al. [20] investigated the challenges of constructing robotic systems for space missions. They emphasized the critical role of maintaining high-quality manipulation of space platforms to ensure the effectiveness of robotic operations in outer space. Their research highlighted the importance of utilizing grippers, cables, and well-prepared space platforms for capturing space debris and conducting various tasks. This finding deepens our understanding of the interplay between robot manipulators and their operating platforms. Their conclusion aligns with our study, which also underscores the significance of the relationship between robot manipulators and the platforms they operate on, further elucidating the importance of maintaining high-quality manipulation for efficient robotic operations in space.
Sun [37] investigated the specifics of performing manipulation robotics work. The researcher concludes that the high quality of the manipulation units used to control mobile robotic devices frees up additional resources for other operations related to mobile robot operability. According to the author, robotics is intensively penetrating all areas of modern life and the use of modern mobile manipulation robots will only increase in the future. The author's conclusion is to some extent debatable, since in a cosmic vacuum it is far from always possible to unleash additional possibilities. Similarly, the study by author underscores the significance of high-quality manipulation units in optimizing mobile robot operability, resonating with investigation's focus on the importance of accurate execution of operator commands by manipulators.
Pak et al. [38] examined the challenges arising from direct human-robot interactions in everyday settings. They attributed several issues in these interactions to psychological factors, including human reluctance to accept robot design, features, and autonomy levels. The researchers highlighted the increasing integration of robots into daily life, emphasizing the growing automation of society. While their study underscored the importance of human-robot interaction and the diverse applications of robotic manipulation across fields, it also emphasized the significance of findings in space and medical contexts. It's worth noting that while their conclusions align with ours in terms of emphasizing human-robot interaction, the relevance of robot manipulator design may differ in space conditions. A similar subject is addressed in a study by Xie [39], dedicated to the challenges of autonomous robotic manipulation of biological cells. The author notes that the use of modern manipulator-based models of mobile robots opens up broad prospects in the development of bioengineering systems. This opens up additional opportunities in medical research and allows for significantly improved control of robotic optical manipulations with biological cell systems [40]. The conclusions are consistent with the findings of this study, as mobile robotic arms hold considerable promise for both space and medical applications.
In the study by Colombo and Sanguineti [41], various challenges in rehabilitation robotics were explored. Their findings suggested that the development and utilization of robotic devices in neurorehabilitation could notably enhance the efficacy of motor disorder rehabilitation and other related functions. The researchers emphasized the pivotal role of human-robot interaction at both physical and cognitive levels to establish a symbiotic relationship wherein mutual benefits arise from the dynamics between the human body and the robot. Their study underscores the potential of robotic devices in neurorehabilitation, highlighting the significance of human-robot interaction, which parallels the focus of our investigation on the interaction between robotic arms and operators. Thus, there exists a fundamental similarity between their emphasis on the importance of close interaction between the robotic arm and the operator and our exploration of the analogy between robot manipulation and human body movements.
The development of manipulator-based mobile robot models for use in the space domain involves the use of a specific algorithm based on the functional design of the human body motion control system. Modern robotic manipulators, designed to operate in hazardous and inaccessible space environments, are modelled by mimicking basic human actions. At the same time, the final models must comply with the list of requirements that determine their effectiveness and the expediency of their use in the space sphere. These requirements include their reliable long-term operation under space conditions, the comparative simplicity of the manipulator design, which implies its quick replacement in case of premature failure, and the safety of space systems as a whole in which such devices are used.
Modelling of mobile robots with manipulative devices has broad prospects, due to the great advantages of using such systems in the space sphere. Today, space robotics has the potential to increase the efficiency of space stations, with robotic manipulators playing an important role in this context. In addition to eliminating human involvement in complex and dangerous technological operations, their use allows for a significant reduction in the technological costs of operating orbital stations, while increasing their functionality. The development of high-quality mathematical models describing the basic functionality of space mobile robots is of great importance in the process of model building. This requires the development of special software packages designed to solve the problem of mathematical modelling of mobile robots based on manipulation devices in a qualitative manner. Such an area of study is entirely self-contained and offers further opportunities to explore the stated subject from new perspectives. The mathematical models created must thoroughly describe all aspects of the subsequent functioning of mobile robotic manipulators capable of effectively solving technological tasks whilst using them in space.
[1] Glebov, N.A., Markiyanov, A.A., Pritchin, S.B. (2013). Interactive control of caterpillar mobile robots using laser communication channels. North Caucasian Region. Technical Science, 2: 23-27.
[2] Orazbayev, B., Dyussembina, E., Uskenbayeva, G., Shukirova, A., Orazbayeva, K. (2023). Methods for modeling and optimizing the delayed coking process in a fuzzy environment. Processes, 11(2): 450. https://doi.org/10.3390/pr11020450.
[3] Зеленько, Е., Катаєва, Є. (2023). SPADE software agents and their impact on hardware resources. Вісник Черкаського державного технологічного університету, (3): 51-68. https://doi.org/10.24025/2306-4412.3.2023.286553
[4] Bulgakov, A.G., Bertram, T., Gorchakov, V.V., Kasatkin, A.V. (2011). Development of a mobile robot for technological processes in construction. News of higher educational institutions. North Caucasian region. Technical science, 6: 20-25.
[5] Stepanchuk, O., Bieliatynskyi, A., Pylypenko, O. (2019). Modelling the bottlenecks interconnection on the city street network. In International Scientific Siberian Transport Forum, Novosibirsk, Russia, pp. 889-898. https://doi.org/10.1007/978-3-030-37919-3
[6] Mojseyenko, I.P., Revak, I.O., Demchyshyn, M.Y. (2013). Modelling state economic security by its intellectual potential parameters. Actual Problems of Economics, 150(12): 278-285.
[7] Danylkovych, A., Sanginova, O., Shakhnovsky, A. (2023). Computer simulation and optimization of the composition of the hydrophobising mixture. Bulletin of Cherkasy State Technological University, (2): 100-110.
[8] Kershin, A.Z., Yergaliyev, D.S. (2017). Navigation and control of a mobile robot. Proceedings of the International Symposium "Reliability and Quality", 1: 33-34.
[9] Orazbayev, B., Kozhakhmetova, D., Orazbayeva, K., Utenova, B. (2020). Approach to modeling and control of operational modes for chemical and engineering system based on various information. Applied Mathematics and Information Sciences, 14(4): 547-556. https://doi.org/10.18576/amis/140403
[10] Barlybayev, A., Sharipbay, A. (2015). An intelligent system for learning, controlling and assessment knowledge. Information, 18(5): 1817-1827.
[11] Mikhaylov, B.B., Nazarova, A.V., Yushchenko, A.S. (2016). Autonomous mobile robots - navigation and control. Proceedings of the Southern Federal University. Technical Science, 8: 48-69.
[12] Prokopenko, T.O., Povolotskyi, Y. (2022). A system of criteria for evaluating the efficiency of projects in the field of information technologies. Bulletin of Cherkasy State Technological University, 4: 23-30.
[13] Yevdokimova, T.S., Sinodkin, A.A., Fedosova, L.O., Tyurikov, M.I. (2019). System for positioning and identification of a mobile robotic platform in a limited and open space. Proceedings Nizhny Novgorod State Technical University named after R.E. Alekseev, 2(121): 16-25.
[14] Shynkariuk, I.M. (2022). Alternative representation of space and time: Geometric solution of problems of relativity theory. Scientific Herald of Uzhhorod University. Series "Physics", 51: 74-82.
[15] Zinchenko, I.H., Lavdanska, O.V. (2022). Modern technologies for evaluating the effectiveness of digitalization. Bulletin of Cherkasy State Technological University, 2: 34-42.
[16] Havrysh, O., Obruch, Y., Chepynoga, A., Honcharov, A., Panasko, O. (2023). Organizational structure of technical protection of information at the network level using VPN technology. Bulletin of Cherkasy State Technological University, (3): 5-15. https://doi.org/10.24025/2306-4412.3.2023.284551
[17] Yurevich, Y.I. (2006). Fundamentals of robotics. Lomonosov Moscow State University, Moscow, 29-36.
[18] Goncharov, O.I. (2012). Construction of robots, main subsystems. Lomonosov Moscow State University, Moscow, 35-46.
[19] Satybaldyev, A., Berdibekova, S., Attokurov, A., Igamberdieva, Z. (2023). String theory and theory of everything: Review research. Scientific Herald of Uzhhorod University. Series "Physics", 54: 80-95.
[20] Huang, P., Meng, Z., Guo, J., Zhang, F. (2017). Tethered Space Robot: Dynamics, Measurement, and Control. Academic Press, London, 62-71.
[21] Nickols, F., Lin, Y. (2019). Creating Precision Robots. Butterworth-Heinemann, Oxford, 51-59.
[22] Karimi, H.R. (2020). Fundamental Design and Automation Technologies in Offshore Robotics. London: Academic Press.
[23] Afonin, A.N., Aleynikov, A.Y., Bondareva, Y.N. (2014). Simplified calculation of the kinematics of a mobile robot with three omniwheels. Applied Mathematics & Physics, 19(190): 180-183.
[24] Peplinski, H. (2019). Ship and Mobile Offshore Unit Automation. Gulf Professional Publishing, Oxford, 45-60.
[25] Vokhmintsev, A.V., Pachganov, S.A. (2018). Algorithm for simultaneous navigation and mapping by a mobile robot based on an iterative algorithm of nearest points and a descriptor calculated in a round sliding window. Bulletin of Yugra State University, 3(50): 52-59.
[26] Walsh, S.M., Strano, M.S. (2018). Robotic systems and autonomous platforms: Advances in materials and manufacturing. Woodhead Publishing.
[27] Rosen, J. (2019). Wearable Robotics: Systems and Applications. Academic Press, London, 48-57.
[28] Nenchev, D., Konno, A., Tsujita, T. (2018). Humanoid Robots, 1. Butterworth-Heinemann, 64-70.
[29] Mustafin, A., Kantarbayeva, A. (2022). A model for competition of technologies for limiting resources. Bulletin of the South Ural State University, Series: Mathematical Modelling, Programming and Computer Software, 15(2): 27-42. https://doi.org/10.14529/mmp220203
[30] Korchynska, O.S., Mykyychuk, M.M. (2023). Sources of metrological risks as factors of influence on the technological process. Bulletin of Cherkasy State Technological University, (1): 61-71.
[31] Pavliuk, L. (2022). Electron modelling in conjunction witch vacuum modelling. Scientific Herald of Uzhhorod University. Series "Physics", (52): 27-35. https://doi.org/10.54919/2415-8038.2022.52.27-35
[32] Tzafestas, S.G. (2013). Introduction to Mobile Robot Control, 1. Elsevier, Oxford, 40-59.
[33] Jaulin, L. (2021). Mobile Robotics: International. Elsevier, Oxford, 26-40.
[34] Kerimkhulle, S., Obrosova, N., Shananin, A., Azieva, G. (2022). The nonlinear model of intersectoral linkages of Kazakhstan for macroeconomic decision-making processes in sustainable supply chain management. Sustainability, 14(21): 14375. https://doi.org/10.3390/su142114375
[35] Klancar, G., Zdesar, A., Blazic, S., Skrjanc, I. (2017). Wheeled mobile robotics: From fundamentals towards autonomous systems. IEEE Transactions on Education, 44(4): 342-346.
[36] Nikolakopoulos, G., Mansouri, S., Kanellakis, C. (2022). Aerial Robotic Workers, 1. Butterworth-Heinemann, Oxford, 23-36.
[37] Sun, D. (2022). Robotic Cell Manipulation, 1. Academic Press, London, 67-80.
[38] Pak, R., de Visser, E., Rovira, E. (2019). Living with Robots. Academic Press, London, 50-59.
[39] Xie, M. (2021). Autonomous Robot-Aided Optical Manipulation for Biological Cells. Academic Press, London, 26-40.
[40] Fernandez, D., Dastane, O., Omar Zaki, H., Aman, A. (2023). Robotic process automation: Bibliometric reflection and future opportunities. European Journal of Innovation Management, 10.
[41] Colombo, R., Sanguineti, V. (2018). Rehabilitation Robotics, 1. Academic Press, London, 26-30.