Boukrouma Houcem Eddine*![]() | Bendib Riad
| Bendib Riad![]() | Zennir Youcef
| Zennir Youcef![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The purpose of this study is to enhance the reliability of emergency shutdown systems in the electric production industry by addressing spurious activations. Such activations may lead to production losses, stress on affected components and systems, and increase hazards during the restoration process of the system and losing the trust in safety system. This can lead to ignorance of serious detections of dangerous situations. Hence, the optimization and control of spurious activations becomes imperative for ensuring both efficiency and cost-effectiveness of any industrial plant. In the last few decays, several optimization meta-heuristic techniques are developed in literature. Particle swarm optimization is power and robust tool dedicated to solve complex problems. This paper presents a comprehensive review of the application of particle swarm optimization to minimize spurious trip rate by the optimization of performance parameters of emergency shutdown system installed in a combined cycle power plant. The results show that the obtained spurious activations rate is minimum.
decision making, emergency shutdown system, metaheuristic, optimizing, particle swarm optimization, safety systems performance, spurious activation
In the searches of sustainable and efficient energy solutions and with the challenges of climate change, it has become necessary to adopt clean energy sources, to meet the increasing global energy demands while striving to minimize the environmental impact. Due to their exceptional efficiency, combined cycle power plants have emerged as a revolutionary technology in the field of power generation taking advantage of their integration of the best features of traditional gas turbine and steam power plants.
To ensure the safety and the reliability of industrial plants and to avoid accidents that can affect economically the plants and damage health and environment safety systems are put in place. These systems prevent accidents, protect personnel, and environment by performing several functions including fire detection, isolation of hazardous energy, emergency shutdown... etc.
International standards provide guidelines and outline the principles to ensure the reliability and effectiveness of safety systems; also, standards categorize the failures that can affect the reliability of safety systems. Including spurious trip activation, which means an unwanted and unnecessary activation of safety function of the systems [1].
The emergency shutdown system is a safety system that designed to rapidly and automatically, shut down the power plant in the existence hazardous conditions.
The objective of this work is to optimize the performances of an emergency shut down by minimizing the spurious activations of this system. If the system experiences spurious activation, it may unnecessarily shutdown the power plant even with no actual hazardous situation [2]. This sudden and unexpected shutdown can lead to a sudden loss of power generation, influencing the plant's ability to supply electricity to consumers, reduce the availability of the power plant. Each time the plant stops, it needs to go through a start-up process before it can resume power generation; this process is time-consuming and can result in prolonged downtime. The shutdown of the plant can also result in significant economic losses due to the loss of power generation during the downtime causes the loss of the factory revenue. In addition, the spurious due to the unwanted activations will decrease the trust in the safety system. Which causes a critical ignorance of alarms during serious and dangerous situations.
The minimizing of spurious trip rate is a complex problem that include multiple constraint, so it is difficult to solve using traditional optimization techniques. Metaheuristic methods can solve optimization problems with complex and nonlinear objective functions and multiple constraints efficiently [3]. Due to particle swarm optimization algorithm’s characteristics and great global search capabilities [4], it is used in our study to solve the optimization problem.
The remainder of this paper is organized as follows: The identification of the system (combined power cycle plant and the emergency shutdown system) is given in section 2 and its subsections. the type of failures that can effect the ESD system are presented in section 3. Safety function and its integrity is developed in section 4. the problem of optimization is explained in section 5. the objective function that discribe the problem is presented in section 6. All aspects related to the PSO algorithm are developed in section 7 and its subsections. The results and discussions associated are provided in section 8. The conclusion is stated in section 9.
2.1 Combined cycle power plant
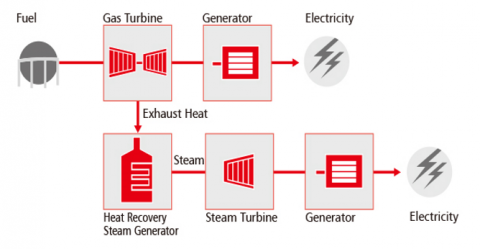
The efficiency of a gas turbine for electricity generation is always limited by the fact that the exhaust gases leave the turbine at a high temperature and therefore still contain a large amount of energy that has not been recovered [5].
A combined-cycle gas turbine power plant is essentially an electrical power plant in which a gas turbine and a steam turbine are used in combination to achieve greater efficiency than would be possible independently [6].
In order to increase the efficiency of production the exhaust from the gas turbine is fed into a specially designed heat recovery steam generator that produces steam from the hot air. This steam is then used to drive a steam turbine generator that produces an additional amount of electricity [5].
The combined cycle power plant and its components are illustrated by Figure 1 below:
Figure 1. Combined cycle power plant [7]
2.2 Emergency shutdown system
Emergency shutdown system is a system used in industry aim to rapidly and automatically bring a process to a safe state in the event of an abnormal situation or when safe operating conditions have been transgressed [8]. It makes a difference to avoid circumstances from having disastrous impacts financially, ecologically, or operationally. Crisis Shutdown Frameworks in any plant minimize harm to working faculty & the environment or harm to hardware, by securing against spills, hydrocarbon elude, fire episodes, blasts, etc. Amid a crisis, the method operations are halted by the ESD framework, hence, separating the danger to heighten [9].
The emergency shutdown process in our case in combined cycle power plant is carried out by an ESD system activates as the final safety layer to stop the whole system. In case of a fire event, the ESD activates to protect gas turbine and steam turbine, limit the damages of the accident, and allow the firefighting system to start in ideal circumstances.
When sensors detect an emergency, a signal sent to the logic solver of the ESD system, to trait the information explain the status of the protected area, the logic solver takes the decision to shut down the system. The shutdown process starts by instantaneously shut off the fuel supply to the gas turbine by a shutdown valve (SDV gas supply line), that close the entire gas pipeline. The steam produced in the heat recovery steam-generator is directed to the condenser bypassing the steam turbine with a bypass system. The supply pipe that feed the steam will be closed also by another shutdown valve SDV steam turbine.
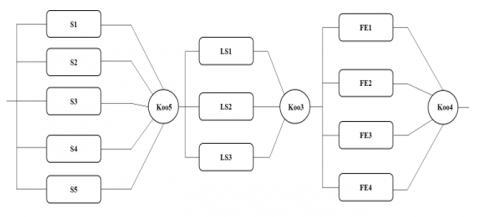
The current ESD system installed in our case consists of following subsystems:
The distribution of the subsystems composing the ESD system is represented in Figure 2 below:
Figure 2. ESD reliability block diagram
The international standard for functional safety of electrical, electronic and programmable electronic safety-related systems IEC61508 classifies the failures modes of instrumented safety system according to their effect on the safety function into two categories.
3.1 Dangerous failures
Disappointment of a component and/or subsystem and/or system that plays a portion in executing the security work that:
Anticipates a security work from working when required (request mode) or causes a security work to come up short (nonstop mode) such that the framework beneath control is put into a dangerous or possibly unsafe state; or diminishes the likelihood that the security work works accurately when required [10].
3.2 Safe failures
Spurious trip means an unwanted activation of the safety function when there is no hazardous condition present. This can cause unnecessary shutdown in the system that can lead to economic losses and operational implications (production will stop until the system restart again 'time loss', loss of the raw material transformed into an unfinished product…) [10].
Reducing dangerous failures involves implementing measures, such as redundancy and diagnostic testing, to prevent critical components from failing in a way that compromises safety. Simultaneously, minimizing safe failures requires careful consideration to avoid situations where the system might unnecessarily trigger safety measures in the absence of a real threat. To keep this balance the optimization of redundancy and testing to achieve the optimal designing of safety systems.
Functional safety, which is a part of overall safety aims to reduce the risk of a hazardous system operating to an acceptable or tolerable level by introducing a set of safety-related functions [11].
We can express the effectiveness of our safety function of a safety system by two aspects: The safety integrity of the safety system, which we express by the safety integrity level SIL. And its spurious trip requirements of safety functions to be allocated to safety systems expressed by spurious trip level STL.
Risk assessment plays a pivotal role in determining the Safety Integrity Level (SIL) and Safety Trip Level (STL) for a system. SIL is a measure of the reliability required from safety systems to achieve an acceptable level of risk reduction. Through a comprehensive risk assessment, potential hazards and their consequences are identified, and their associated risk is quantified. SIL levels are then assigned based on the level of risk reduction needed. Safety Trip Level (STL) is determined by analyzing the time available for the safety system to intervene before the consequences of a hazardous event become unacceptable. This assessment involves evaluating factors such as process dynamics, response times, and the time required to bring the process to a safe state.
The security integrity level (SIL) deciding approach is partitioned into two fundamental parts, the primary is to characterize the desired security capacities to bring the method to secure state, and the moment it concerns the plan of safety-instrumented system, which incorporate all sensors, rationale solvers and last components utilized to realize the required work. There are four keenness levels SIL1, SIL2...SIL4. On the other hand, these astuteness levels are the measures of execution of any security framework in terms of likelihood of disappointment beneath request [12, 13].
The spurious trip level (STL) determination is necessary to maintain an acceptable level of spurious trip rate, because since the next chance decrease considering the financial, security, and environmental perspectives of the SIS is accomplished by bringing down the number of spurious trips, to have much better guarantee the system’s good operational continuity [14]. In our study, we based on the spurious trip level to optimize the performance of our safety system.
Accomplishing the required level of accessibility involves providing sufficient repetition of identical elements; Redundancy may be a profitable way to upgrade a system's availability by including plug-ins. A system consists of N identical elements, obtains the ability to function even in the presence of failures by including redundant subsystems. Redundancy reduces the probability of total system failure while also lowering downtime and maintenance time and increasing productivity [15].
For a system containing N element, repetition of one component out of N (1ooN) components is the most excellent to guarantee the security work and increment the reliability of the safety system, because the system will be able to finish its safety function with only one element available, which mean that this system tolerates N-1 failure. But it impacts contrarily the rate of spurious trips since with this design the spurious actuation of one component is sufficient to cause the activation of all the system.
The time between tests, also known as the test interval, is important in terms of system performance and reliability. The test interval defines how frequently preventative maintenance or testing is performed in systems. It is critical to strike the proper balance while determining the test interval. A shorter test period can result in earlier detection of degradation, allowing for quick corrective steps, preventing potential failures and minimizing downtime. However, an extremely short test interval can result in unneeded maintenance and increased operational costs. A longer test interval, on the other hand, may save money in the short term but may increase the risk of undiagnosed problems [16].
In our system at the commissioning phase, we face a spurious activation of the ESD system and the turbine stop working every time we start the commissioning process due to the activation of the emergency shutdown system. The head office put an objective to reduce the frequency of spurious activation to STR<10-5. To avoid this kind of problem and continue the commissioning process and to finish the tests and after referring to the IEC61508, we propose to decrease the spurious trip rate STR of ESD system and the times between tests. The choosing of the optimal redundancy and time between tests impose the simulation of the STR in function of the system redundancy and time between tests.
The STR of a safety function given by a safety-instrumented system is decided by calculating the sum of the STR of its three subsystems (S, LS, and FE). This could be communicated by the taking after equation [17]:
$\mathrm{STR}_{(\mathrm{SIS})}=\mathrm{STR}_{(\mathrm{S})}+\mathrm{STR}_{(\mathrm{LS})}+\mathrm{STR}_{(\mathrm{FE})}$ (1)
The STR of each subsystem with a design of K out of N components is represented by the taking after equation:
$\begin{aligned} & \operatorname{STR}(\mathrm{KooN})=\mathrm{A}_{\mathrm{N}}^{\mathrm{K}} \cdot \lambda_{\text {Sind }}^{\mathrm{K}} \cdot \prod_{\mathrm{i}=1}^{\mathrm{K}-1}\left[\lambda_{\text {sUind }} \cdot\left(\frac{\mathrm{T} 1}{i+1}+\right.\right. \left.\left.\mathrm{MRTs}_{\mathrm{s}}\right)+\lambda_{\text {SDind }} \cdot \mathrm{MTTR}_{\mathrm{s}}\right]+\beta \lambda_{\mathrm{SU}}+\beta_{\mathrm{SD}} \lambda_{\mathrm{SD}}\end{aligned}$ (2)
With
$\begin{gathered}\mathrm{A}_{\mathrm{N}}^{\mathrm{N}-\mathrm{K}+1}=\frac{\mathrm{N} !}{(\mathrm{K}-1) !} \\ \lambda_{\mathrm{S}}=\lambda_{\mathrm{SD}}+\lambda_{\mathrm{SU}} \\ \lambda_{\mathrm{Sind}}=\left(1-\beta_{\mathrm{SU}}\right) \cdot \lambda_{\mathrm{SU}}+\left(1-\beta_{\mathrm{SD}}\right) \cdot \lambda_{\mathrm{SD}}\end{gathered}$
Since the system is within the production stage, which implies we cannot adjust the number of components (N) of any subsystem (already existing within the site), so we are able only to act on the voting (K out of N) of each subsystem and we moreover act on time between periodic tests T1.
7.1 Particles swarm optimization
Many algorithms such as ant colony algorithms and firefly algorithm use the behavior of so-called swarm intelligence [18]. Particle swarm optimization, or PSO, was created by Kennedy and Eberhart in 1995 [19] and has ended up one of the foremost broadly utilized swarm-intelligence-based algorithms due to its simplicity and adaptability. Instead of utilize the mutation/ crossover, it employments real-number randomness and global communication among the swarm particles. Therefore, it is additionally simpler to execute since there is no encoding or translating of the parameters into parallel strings as with those in genetic algorithms [20].
The PSO algorithm searches the space of an objective work by altering the directions of particles, as the piecewise ways shaped by positional vectors in a random way [21].
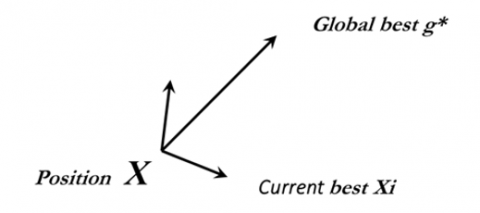
The development of a swarming particle comprises of two major components: a stochastic component and a deterministic component. Each particle is pulled in toward the position of the current global best g and its own best location Xi, whereas at the same time it moves randomly. When a particle finds a location that is optimal than any already found areas, it upgrades that location as the modern current best for particle i. There is a current best for all n particles through iterations. The point is to find the global best among all the current best arrangements until the objective now not makes strides or after a certain number of iterations [16].
In Figure 3, we find a representation of the behavior of a particle i among the swarm according to the PSO algorithm:
Figure 3. Schematic representation the particle i moving toward the global best and the current best Xi
7.2 Math of particle swarm optimization
The position of each particle represents a potential solution to the optimization problem, and the algorithm iteratively updates these positions based on their historical best positions and the best positions found by their neighboring particles.
The mathematical representation of the PSO algorithm involves updating the position and velocity of each particle at each iteration. Each particle tries to modify its position Xi at a moment t to another position Xi at the net moment t+1 by a velocity Vi(t), using the following formula:
Xi (t+1) = Xi(t) + Vi(t+1) (3)
where, Vi(t+1) is the velocity (speed) of the particle i at time t+1. Vi(t+1) discussed with the formula:
$\begin{gathered}\mathrm{Vi}(\mathrm{t}+1)=\mathrm{Wi} \cdot \mathrm{Vi}(\mathrm{t})+\mathrm{c}_1 \cdot \operatorname{rand}() \cdot\left(\mathrm{X}_{\text {pbest }}-\mathrm{Xi}(\mathrm{t})\right)+\mathrm{c}_2 \cdot \text { rand }() \cdot\left(\mathrm{X}_{\text {gbest }}-\mathrm{Xi}(\mathrm{t})\right)\end{gathered}$ (4)
where, Wi is the inertia weight, c1, c2 are learning variables or accelerating variables, rand() irregular or random number between 0 and 1, Xpbest particle's best position and Xgbest global best position.
The algorithm continues to iterate until a stopping criterion is met, such as a maximum number of iterations or achieving a satisfactory solution.
7.3 Particle swarm optimization parameters and their effect on the algorithm
The PSO algorithm includes several optimization parameters, such as inertia weight w, particle number m, accelerate constant c1 and c2, the max iteration number Tmax [22].
Inertia weight: depicts that the past speed impact on current speed. Its choice may tune the global and local search capacity of PSO [23].
Particle numbers: the number of particles within the swarm the more particles within the swarm, the bigger the introductory differences of the swarm – given that a great uniform initialization conspire is utilized to initialize the particles. A huge swarm permits bigger parts of the search space to be covered per iteration [23].
Accelerate constant ‘c1’ and ‘c2’: the particle stochastic speeding up weight toward the personal best (pbest) and the global best (gbest). Little accelerate constant may initiate the particle meandering absent in objective area; be that as it may, huge accelerate constant may actuate that the molecule moves rapidly to the objective area, indeed fly absent from it [23].
Number of iterations: The number of cycles to reach an optimal arrangement is additionally problem-dependent. As well, few cycles may end the search rashly. On the other hand, a huge number of cycles has the result of pointless computational complexity [24].
7.4 Main concept of swarm optimization algorithm
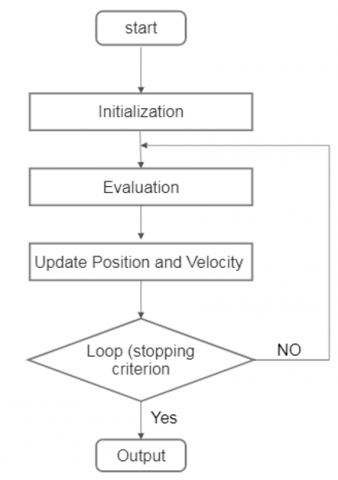
Based on the above the PSO algorithm operates according to the following steps [25]:
The flowchart of the PSO algorithm is represented in Figure 4:
Figure 4. PSO flow chart
As mentioned before and by applying the Eq. (2), the variables we are acting on the time between periodic tests T1 and the voting redundancy K out of N of each subsystem in our system. So the other variables of each subsystem are presented on the Table 1.
Table 1. Sub-systems performance variables values
|
Sensors |
Logic Solver |
Final Element |
|||
|
$\lambda_{\mathrm{S}}$ |
0.383E-6 |
$\lambda_{\mathrm{S}}$ |
1.5E-7 |
$\lambda_{\mathrm{S}}$ |
3.94E-6 |
|
DC |
0.692 |
DC |
0.02 |
DC |
0.2 |
|
β |
0.02 |
β |
0.01 |
β |
0.02 |
|
MTTRS |
4h |
MTTRS |
10h |
MTTRS |
8h |
|
N |
5 |
N |
3 |
N |
4 |
With:
MRTS=MTTRS
β D = β/2
DCS = $\lambda_{\mathrm{S}}$ *DC
λSU = (1 - DCS) * $\lambda_{\mathrm{S}}$
$\lambda_{\mathrm{SD}}$ = DCS * $\lambda_{\mathrm{S}}$
To simplify the application of the PSO MATLAB provides several toolboxes that are useful for optimization tasks, including implementations of Particle Swarm Optimization (PSO) toolbox that can efficiently explore the entire solution space. A MATLAB code uses the following PSO parameters: number of particles (m=10). Inertia weight (W=0.9). Number of iteration (Tmax=20). Accelerate constant (c1=c2=2). generates particles based on those parameters and start the exploitation of the search space expressed by the Eq. (2) using variables from the Table 1. The particles communicate with each other by sharing information about their personal best and the global best, which guides their movement towards promising regions of the search space. The particles start getting close to a local point in the search space, where the optimal solution found. After finding the optimal, the algorithm stops (stopping criterion) then the value of the two variables that allowed the obtaining of the optimal solution (T1 and K out of N) and the optimal STR appear on the workplace of MATLAB. It also shows figures explaining the distribution of particles among the search space. The optimal solution is identified in a different color than the rest of particles.
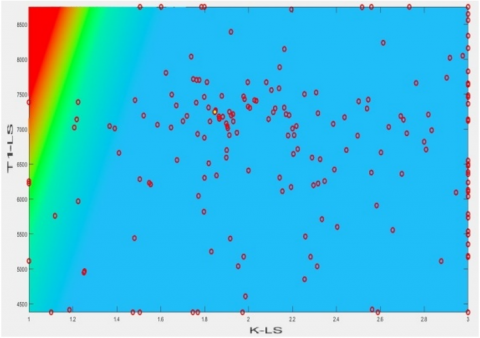
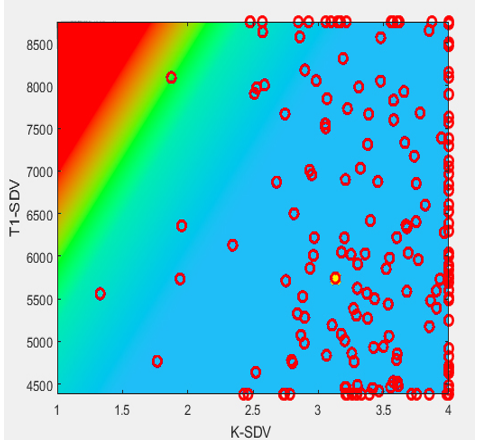
The optimal time between tests T1, optimal redundancy (voting) K out of N and the STR be shown in Table 2. After finding the optimal STR of each subsystem, we can find the optimal STR of the ESD system by applying the Eq. (1). The figures of particles distribution of each subsystem are shown on Figures 5-7, respectively.
Table 2. Results of optimization
|
|
S |
LS |
SDV |
|
T1(hour) |
8 118 |
7 245 |
6 501 |
|
KooN |
4 |
2 |
3 |
|
STRsubsys |
3.83×10-9 |
1.235×10-9 |
3.9405×10-8 |
|
STRESD |
4.447×10-8 |
||
The results of the optimization show a low value of the STR of the ESD system, means the unwanted continues activation of this system that cause the stop of the plant during the commissioning process is reduced. Compared to the high frequency of the spurious activation that we noticed when we start commissioning process, the frequency of the STR obtained in our study is more preferable for the ESD system.
Table 2 shows the relevant voting redundancy KooN and time between tests T1 that we should apply in our ESD system to achieve the optimal STR value for the ESD system.
To get a STR for our emergency shutdown system equal to 4.447×10-8, for sensors the best voting redundancy is four sensors out of five sensors (4oo5), and the best time between tests is 8 118 hours.
For logic solver the best voting redundancy is two logic solvers out of three logic solvers (2oo3), and time between tests equal to 7 245 hours.
Moreover, for the shutdown valve the best Voting redundancy is three valves out of four valves (3oo4) and time between tests equal to 6 501 hours.
Figure 5. Sensors PSO Particles distribution
Figure 6. Logic solver PSO Particles distribution
Figure 7. Shutdown valve PSO particles distribution
The figures above present the distribution of particles on the research space. Each particle presents a possible solution to the problem. The red spots present the best location of particles on the research space and the only yellow spot present the global best or the optimal solution of our optimization problem. We can notice that the areas with red and green color, where the value of the STR is relatively high are almost empty of particles. In addition, we can find that particles are spread on the blue area where low values of the objective function in our space, and start getting close to a global location where the optimal solution will be found. The algorithm exploits the research space and start getting close after the particles share their best position between each other, this mechanism allows the algorithm to reach the best position presented by the yellow spot which its projection of the two aces as presented in figures gives the variables on the T1 and KooN. These two variables are the optimal parameters to have the optimal STR.
In summary, it is important to consider spurious activation when evaluating the performance of instrumented safety systems. This type of failure can lead to significant economic losses.
Optimizing safety systems performances is a complicated industrial issue that need new techniques to solve the constraints and the dependency of performance parameters and the complexity of industrial systems make the finding of an optimal solution very hard.
In this paper, we minimize of the spurious activations rate by finding the optimal parameters of redundancy and time between tests to obtain the smallest possible value for the STR.
The obtaining of such value for the STR shows the effectiveness of the findings results regarding the voting redundancy (KooN) and time between tests (T1) of each element of the ESD system.
The results also show that particle swarm optimization is valuable tool for optimizing safety system performance by aiding in the decision-making process for selecting appropriate parameters to enhance system performance. It has the ability to search for optimal solutions in a global search space, by exploring multiple regions simultaneously, which increases the chances of finding the global optimum.
Industry in most cases faces multi-objective problems where should find an optimal solution for lot of objectives that interact in same parameters, like the objective of reliability and the objective of environment protection which are linked together. The objective for future works is using multi-objective particle swarm optimization to optimize industrial problems, to more realistic study, and cover the reality of industrial problems.
[1] Ghanooni, M.A. (2015). Spurious activations of safety-instrumented systems. Department of Production and Quality Engineering, Norwegian University of Science and Technology. https://ntnuopen.ntnu.no/ntnu-xmlui/bitstream/handle/11250/2368559/12020_FULLTEXT.pdf?sequence=1.
[2] Lundteigen, M.A., Rausand, M. (2008). Spurious activation of safety instrumented systems in the oil and gas industry: Basic concepts and formulas. Reliability Engineering & System Safety, 93(8): 1208-1217. https://doi.org/10.1016/j.ress.2007.07.004
[3] Allou, S., Zennir, Y. (2018). A comparative study of PID-PSO and fuzzy controller for path tracking control of autonomous ground vehicles. In Proceedings of the 15th International Conference on Informatics in Control, Automation and Robotics - Volume 1: ICINCO, Porto, Portugal, pp. 296-304. http://doi.org/10.5220/0006910903060314
[4] Zhang, Y., Wang, S., Ji, G. (2015). A comprehensive survey on particle swarm optimization algorithm and its applications. Mathematical Problems in Engineering, 2015: 931256. http://doi.org/10.1155/2015/931256
[5] Breeze, P. (2019). Power Generation Technologies, Third Edition. London, UK: Newnes Ltd. https://doi.org/10.1016/C2017-0-03267-6
[6] Zohuri, B. (2021). Molten Salt Reactors and Integrated Molten Salt Reactors - Chapter 3 - New Approach to Energy Conversion Technology. USA: Academic Press. https://doi.org/10.1016/C2020-0-04543-3
[7] Combined cycle power plant: How it works. Mitsubishi Hitachi Power Systems. https://power.mhi.com/products/gtcc/, accessed on June 24, 2023.
[8] Riad, B., Hamid, B., Hind, R., Youcef, Z. (2018). Design of an integration Frame HAZOP-SIL for safety optimization of a fired heater. In 2018 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Algiers, Algeria, pp. 1-6. https://doi.org/10.1109/CISTEM.2018.8613375
[9] https://whatispiping.com/piping-instrument-interface/, accessed on June. 31, 2023.
[10] The international standard for functional safety of electrical, electronic and programmable electronic safety-related systems IEC61508-4. https://webstore.iec.ch/preview/info_iec61508-4{ed2.0}b.pdf.
[11] Śliwiński, M. (2018). Safety integrity level verification for safety-related functions with security aspects. Process Safety and Environment Protection, 118: 79-92. https://doi.org/10.1016/j.psep.2018.06.016
[12] Batout, N., Riad, B., Zennir, Y., Tedjani, A. (2023). Fuzzy approach for safety integrity level evaluation to improve the safety of an industrial fired heater. International Journal of System Assurance Engineering and Management, 14: 2497-2513. https://doi.org/10.1007/s13198-023-02103-y
[13] Bendib, R., Mechhoud, E.A., Rodriguez, M., Zennir, Y. (2023). A systematic approach for risk assessment in LPG storage tanks area – SKIKDA refinery. Algerian Journal of Environmental Science and Technology, 9(1): 2898-2907.
[14] Meng, Q., Kan, Y., Li, X., Wang, X., Zhao, D., Moon, I. (2020). Spurious activation and operational integrity evaluation of redundant safety instrumented systems. Reliability Engineering and System Safety, 197: 106785. https://doi.org/10.1016/j.ress.2019.106785
[15] Hindi, L., Asker, H.K. (2023). Analyzing the impact of repairable 1-out-of-3 cold standby components on system availability: A capacity analysis. Mathematical Modelling of Engineering Problems, 10(3): 937-942. https://doi.org/10.18280/mmep.100325
[16] Bendib, R. (2017). Optimization and improvement of the overall performance of an industriale Plant. PHD thesis, M’hamed Bougara University Algeria. http://dlibrary.univ-boumerdes.dz:8080/handle/123456789/3420
[17] Innal, F., Dutuit, Y., Chebila, M. (2015). Reliability engineering and system safety: Safety and operational integrity evaluation and design optimization of safety instrumented systems. Reliability Engineering & System Safety, 134: 32-50. http://doi.org/10.1016/j.ress.2014.10.001
[18] Yang, X.S., Karamanoglu, M. (2013). 1-swarm intelligence and bio-inspired computation: Theory and applications. Swarm Intelligence and Bio-Inspired Computation, London, UK: Elsevier. http://doi.org/10.1016/B978-0-12-405163-8.00001-6
[19] Kennedy, J., Eberhart, R. (1995). Particle swarm optimization. In Proceedings of ICNN'95 - International Conference on Neural Networks, Perth, WA, Australia, pp. 1942-1948. https://doi.org/10.1109/ICNN.1995.488968
[20] Yang, X.S. (2014). Nature-Inspired Optimization Algorithms: Introduction and Overview. http://doi.org/10.13140/RG.2.2.24609.56167
[21] Kennedy J, Eberhart RC, Shi Y. (2001). Swarm Intelligence. London, UK: Academic Press.
[22] He, Y., Ma, W.J., Zhang, J.P. (2016). The parameters selection of PSO algorithm influencing on performance of fault diagnosis. MATEC Web of Conferences, 63: 02019. https://doi.org/10.1051/matecconf/20166302019
[23] Engelbrecht, A.P. (2007). Computational Intelligence: An Introduction. John Wiley & Sons, Ltd. http://doi.org/10.1002/9780470512517.ch17
[24] Trelea, I.C. (2002). The particle swarm optimization algorithm: Convergence analysis and parameter selection. Information Processing Letters, 85(6): 317-325. https://doi.org/10.1016/S0020-0190(02)00447-7
[25] Yang, G. (2007). A modified particle swarm optimizer algorithm. In 2007 8th International Conference on Electronic Measurement and Instruments, Xi'an, China. https://doi.org/10.1109/ICEMI.2007.4350772