Entidhar K. Ibrahim* | Abbas H. Issa | Sabah A. Gitaffa
© 2022 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Direct Current (DC) motors need control and reliability to enhance their performance. The most used controller is PID. However, due to the empirically chosen parameters Kp, Ki and Kd beside the limitation of traditional PID controllers in achieving perfect control response for systems with higher order, a Fractional Order Proportional-Integral-Derivative (FOPID) controller is based on efficient optimization methods. The aim of this paper is using a metaheuristic algorithms for designing a speed controller for a DC motor based on FOPID parameter. System parameters are studied and compared. The simulations of meta-heuristic algorithms are carried out in MATLAB version R2020b. The results showed that the Particle Swarm Optimization (PSO) and Ant Colony Optimization (ACO) algorithms reduced the ITAE objective function in speed control system using a unity feedback FOPID controller. Performance comparisons of the traditional PSO tuned PID and FOPID controllers, beside newer methods, were undertaken to illustrate the efficacy of the proposed PSO-FOPID methodology. ACO-FOPID and ACO-PID were chosen as recent techniques since they utilized the same DC motor type. According to the findings, the suggested PSO-FOPID controller had the superior transient and frequency response in terms of rising time which equals 0.01537 sec, settling time equals 0.01556 sec and zero ITAE; however, it had the poorest maximum overshoot with (2.557%) compared with ACO-FOPID controller.
DC Motor, PID, FOPID, PSO, ACO
Because of their ease of control, reliability and great performance, direct current DC motors are frequently employed in applications of industry. Robustness is the key criteria of the design in DC motor speed control, followed by system performance [1, 2]. As a result, several controllers are built to provide disturbance rejection and resilience. Many approaches, including traditional controllers like Proportional-Integral-Derivative (PID), meta-heuristic approaches and intelligent swarm techniques have been utilized to modify the parameters of these controllers [3]. The most often utilized controllers to control a DC motor's speed were PI and PID. However, changing PID controller parameters when distributing is the main problem [4] and due to the empirically chosen parameters Kp, Ki and Kd as well as the limitation of traditional PID controllers in achieving perfect control response for higher-order systems, where Kp has the ability to amplify the error signal but it affects the system stability, Ki has the unique ability to return the controlled variable back to the exact set point, however it responds relatively slower to error signals and it can initially allow a large deviation at the instant of the error which can lead to system instability and cyclic operation. Kd reduces the initial overshoot of the measured variable and therefor stabilizing the process earlier, an FOPID controller based on efficient techniques of optimization like PSO and ACO can be proposed. FOPID controller settings are investigated for reducing the Integral Time Absolute Error (ITAE) between the output of the reference model and the output of the plant [5]. To keep the required performance, the controller must be fine-tuned. To achieve an effective gain values for the controller, numerous tuning procedures were used. Many of the tuning tasks are done by hand, but tuning by hand procedure is time consuming and also challenging. Computational intelligence approaches are now widely utilized for tuning Controller parameters, as it extracts the most accurate results in record time, while the manual tuning method requires many attempts, thoug, the results may be inaccurate. Many strategies for designing FOPID controllers have been reported as the following literature [6]. Idir et al. proposed Differential Evolution (DE) and PSO to design FOPID controller to control the DC motor’s speed. The results showed that the DE-FOPID controller exceeds the PSO-FOPID controller in terms of performance, noise rejection, flexibility, and robustness [5]. Altinoz. and Yilmaz presented Gravitational Search Algorithm (GSA), PSO and DE for quarter-car suspension system, when using conventional PID, all optimization techniques got almost the same performance, however the greatest performance is achieved from the PSO algorithm with the minimum overshoot in FOPID. GSA had the worst performance. Furthermore, the DE's performance was almost the same for traditional and fractional order PID implementations [7]. Al-Dhaifallah et al. introduced a Fuzzy Fractional-Order PID (FFOPID) controller scheme for pneumatic pressure regulating systems and compared it to FOPID and conventional PID. FFOPID achieves the best performance [8]. Deacha Puangdownreong presented an optimum FOPID controller for the system of DC motor speed control by utilizing the Flower Pollination Algorithm (FPA), as the simulation findings showed that the FOPID could respond significantly faster than the classical PID. The results showed 0.001 percent error, 0.1455 sec settling time, 0.91 percent for MP and 0.0889 sec rising time [9]. El-Saadawi et al. [10] proposed Gray Wolf Optimization (GWO/FOPID), tuning of Single-loop PID, Nelder-Mead (NM/FOPID) and Genetic Algorithm (GA) to regulate the speed of a DC motor. It is determined that the NM algorithm-based FOPID provides the optimum response. The best results are obtained when the associated settling time and rising time are 0.022 sec, 0.02 sec, with no overshoot. Tirumalasetty Chiranjeevi et al. proposed FPA based PID and FOPID controller for controlling the speed of electric machinery, a comparison of FPA with Fire Fly Algorithm (FA) and PSO approaches were performed. FOPIDC responses exceed PIDC in terms of setup time and oscillation amplitude for output and input responses. ISE-based responses improve dynamics over ITAE and IAE while FPA outperforms FA and PSO [11]. Vanchinathan and Selvaganesan [12] proposed the Artificial Bee Colony (ABC) algorithm to improve the performance of DC motors (operate at a variety of speeds and loads with improved performance and robust speed control), the obtained results were compared to those of Conventional Genetic Algorithm (CGA) and Modified Genetic Algorithms (MGA). The results were that the ABC optimized FOPID controller can reduce the peak time, rise time and settling time compared to the MGA and CGA optimized FOPID controllers for all load cases (0%, 40%, 60%, 80% and 100% load) and the steady state error is less than the CGA and MGA optimized FOPID controllers. This paper provides metaheuristic algorithms for designing a speed controller for a DC motor based on FOPID parameter selection. To demonstrate the efficacy of this combination, all system parameters are studied and compared.
The following is the structure of this paper: Section 2 presents the fractional order PID controller. Section 3 is concerned with the mathematical modelling of a direct current motor. Section 4 offers a summary of optimization techniques and some metaheuristic algorithms which are PSO and ACO algorithms. Results of the experiments applies on section 5 using a simulated proposed model to build up a fractional order PID controller; finally, section 6 highlights the proposed system's conclusions.
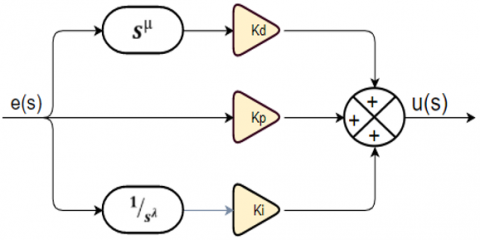
A PID controller is a type of feedback control loop mechanism that is a term often used in control systems due to its simplicity of design and superior performance [13]. As a result, it is worthwhile to increase their operational quality. One way used by engineers to increase the performance of the PID controller is to employ a FOPID controller. A variation on the standard PID controller which has fractional integral and derivative orders rather than integer. FOPID features two additional parameters, (integral order) and (derivative order) and they are fractions; this boosts the system's flexibility and enables a more effective implementation than a standard PID controller [14]. Variations in the monitored system's and controller's parameters are less sensitive to fractional controllers [15]. Figure 1 shows the FOPID controller block diagram [16, 17]. The PID controller's Laplace transform maybe represented as in Eq. (1) [16]:
Figure 1. FOPID controller block diagram
$G_c(s)=\frac{u(s)}{e(s)}=K_p+\frac{K_i}{s}+K_d$ (1)
where:
$G_c(s)$: transfer function of PID controller
Kp: Proportional gain
Ki: Integral gain
Kd: Derivative gain
The FOPID controller's generalized transfer function is described in Eq. (2) [18].
$G_c(s)=\frac{u(s)}{e(s)}=K_p+K_i\left(s^{-\lambda}\right)+K_d\left(s^\mu\right)$ (2)
where:
e(s): is error generated
u(s): is the output of the controller
Kp, Ki, and Kd: are the gains in terms of proportional, integral and derivative, respectively
λ: is the integral term's fractional part
µ: is the derivative term's fractional part
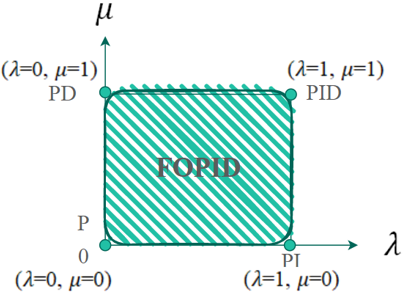
FOPID controller is a generalization of the classical PID controller which spans from point to point as shown in Figure 2 [19].
Figure 2. Active region of classical PID and FOPID controllers
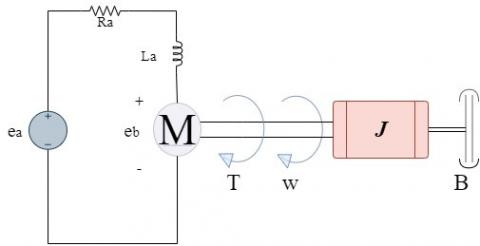
Figure 3 shows the schematic design of an armature-controlled DC motor equivalent circuit [20, 21].
Figure 3. Simple DC motor structure
The differential Eqs. with Laplace transform can be exploited to build a mathematical model of an armature-controlled DC motor in terms of the transfer function, as shown in Eq. (3) [11, 22]:
$\frac{w(s)}{e_a(s)}=\frac{K_i}{\text { La.Jm } s^2+(R a \cdot J m+L a \cdot B m) s+(R a \cdot B m+K b \cdot K i)}$ (3)
where:
ea: is the armature input voltage (V)
Ra: is the armature resistance (Ω)
La: is the armature inductance (H)
ia: is the armature current (A)
eb: is back generated EMF (V)
Tm: is motor generated torque (N\m)
Jm: is moment of inertia of motor body (kg. m2)
Bm: is damping coefficient (due friction) (Nm*sec\rad)
Ki: is torque constant
Kb: is back emf constant
For DC motor proposed, the physical parameters are in Table 1 [23]:
Table 1. DC motor parameters
|
Parameter |
Values |
Units |
|
Friction Bm |
0.00003 |
Nm. s |
|
Inductance of Coil La |
0.5 |
H |
|
Motor inertia Jm Motor constants Kb . Ki Coil resistance Ra |
0.01 0.023 1 |
kg.m - Ω |
The DC motor plant in eq. (3) may be written as in eq. (4)
$\frac{w(s)}{e_a(s)}=\frac{0.023}{0.005 s^2+0.01 s+0.000559}$ (4)
Further study is necessary to regulate control software capable of overcoming the challenges of system nonlinearities in order to boost the dependability, controllability, and use of the better speed of response feasible from DC motor systems. PSO and ACO are used to optimize the FOPID parameters.
4.1 Particle Swarm Optimization (PSO)
Eberhart and Shi [24] devised the PSO in 1995. It is a method of optimization of evolutionary depends on the mobility and the swarm intelligence which travel about in search spaces seeking the optimal result. A particle is represented by a point in N-dimensional space, and its movement is changed based on both its own and the other particles' flying experiences. Every particle attempts to update its position by utilizing its velocity, present position, the separation between the best position of it 'pbest' and the present position and the separation between the global best position 'gbest' and its present position. Eqs. (5) and (6) do this [25-27]:
$\begin{aligned} V_{t+1}=w \times V_t+ & C 1 \times \operatorname{rand}(0,1) \times\left(\text { Pbest }-X_t\right) +C 2 \times \operatorname{rand}(0,1) \times(\text { gbest } \left.-X_t\right)\end{aligned}$ (5)
$X_{t+1}=X_t+V_{t+1}$ (6)
where:
Vt: Velocity of particle
Xt: Position of particle
gbest: Best position of all particles
pbest: Best position of a single particle
C1 and C2: Acceleration Coefficients
w: Inertial Weight factor
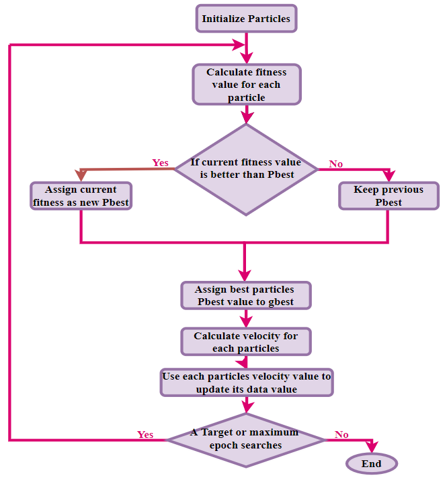
After calculating the new Xt, the particle analyzes its new position. If fitness (Xt) is better than fitness (pbest), then Xt = pbest and fitness (Xt) = fitness (pbest) and when iteration is completed, better fitness (pbest) = fitness (gbest) and pbest = gbest [28].
The procedure of PSO method is shown in Figure 4.
Figure 4. The flow chart of PSO method procedure
4.2 Ant Colony Optimization (ACO)
ACO is a metaheuristic that mimics the collective social insects' cognitive behavior, particularly ant foraging activity. When real ants discover food and other resources, they return back to their nest while pheromones are left on the ground. Pheromones induce other ants, and induced ants may reach a specific location. They will often return to their nest location while pheromones are being deposited on the ground. Because pheromones are volatile, the pheromone of the route which is longer, will vanish faster than the pheromone of the shorter way. In this manner, the ants may select a quick route from their nest to the nourishment place and successfully carry supplies [29, 30].
The probability of an ant traveling from node i to node j is represented by Eq. (7) [31]:
$p_{i j}=\frac{\tau_{i j}^\alpha d_{i j}^\beta}{\sum_{i, j=1 \quad}^n \tau_{i j}^\alpha d_{i j}^\beta}$ (7)
where, α and $\beta>0$ are the pheromone level's weight and distance, respectively. $\tau_{i j}$ refers to levels of pheromone, dij is the spacing between nodes i and j. The pheromone evaporates with time as seen in Eq. (8):
$\tau_{i j}=(1-\gamma) \tau_{i j}$ (8)
where, γ represents the evaporation coefficient of the pheromone.
When all ants have finished their solution, the pheromone level then updated by entirely new level deposited by ants after the evaporation process has been completed, using the following formula in Eq. (9):
$\tau_{i j}=\tau_{i j}+\sum_{k=1}^m \Delta \tau_{i j}^k$ (9)
where, k is the ant number, m is the population and $\Delta \tau_{i j}^k$ can be determined using the Eq. (10):
$\Delta \tau_{i j}^k=\frac{1}{C^k}$ (10)
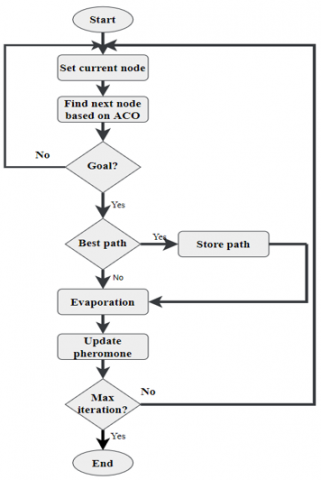
Ck is the ant's reward for taking the right path. The procedure of ACO method is shown in Figure 5.
Figure 5. The flow chart of ACO method procedure
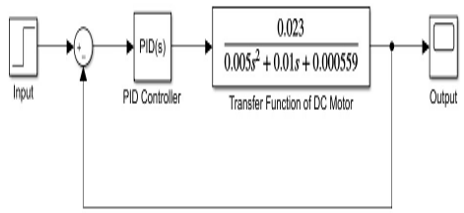
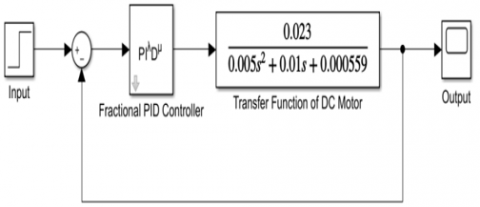
The simulations of meta-heuristic algorithm transient response analysis are carried out in MATLAB version R2020b (9.9.0.1467703) 64-bit (win64). The results for each technique are achieved using the toolbox of FOMCON to implement the FOPID. The entire transfer function of DC motor is given in Eq. (3). The final DC motor transfer function may be produced by employing the indicated parameter values showed in Table (1) to the proposed DC motor system as in Eq. (4). Figure 6 depicts a simulation of the suggested system. Figure 7 shows the output of simulated DC motor with standard PID controller.
Figure 6. The schematic of the block system of DC motor
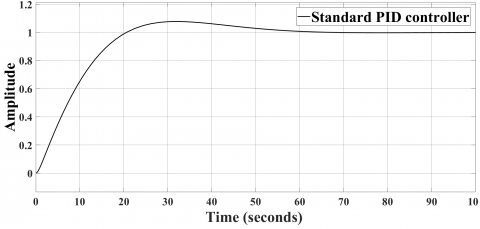
Figure 7. Output of simulated DC Motor with standard PID controller
Despite the system's long settling and rising times, the highest peak reduced dramatically and the measured value approximated the anticipated value.
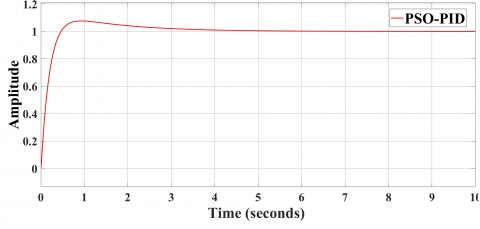
For the PSO method, the particle swarm parameters are set as shown in the Table 2. Figure 8 shows the DC motor's speed Step response with standard PID controller via PSO.
Table 2. The PSO parameters values
|
Parameters’ names |
Values |
|
Inertia |
0.4 |
|
Number of iterations |
100 |
|
Number of Particles Cognitive Component c1 Social Component c2 |
20 2 2 |
Figure 8. Step response of DC motor speed with PSO-PID controller
The settings of the ACO Algorithm were as given in Table (3). Figure 9 shows the DC motor speed step response with standard PID controller via ACO.
Table 3. The ACO parameters values
|
Parameters |
Values |
|
No. of iteration (N) |
100 |
|
Pop. Size |
10 |
|
Step size Sample size Evaporate rate Scaling rate |
1 40 0.6 2 |
The chosen parameters of PSO and ACO algorithms were set manually and they were modified till obtaining the best response for the system (Minimum overshoot, minimum settling and rising time, and minimum steady-state error). The large number of iterations was used to extend the research scope.
By comparing the Particle Swarm Optimization algorithm and Ant Colony Optimization algorithm, we get Table (4).
Figure 9. Step response of DC motor speed with ACO-PID controller
Table 4. A comparison between proposed algorithms results (traditional PID controller)
|
Method |
Input parameters |
MP (%) |
Settling time (sec) |
Rise time (sec) |
Steady State Error |
|
PID |
Kp = 0.0346 Ki = 0.0037 Kd = -0.0048 |
7.73 |
53.2 |
14.5 |
0.0008 |
|
PSO-PID |
Kp = 217.3917 Ki = 132.2257 Kd = 39.2870 |
6.989 |
3.07 |
0.3128 |
0.00016 |
|
ACO-PID |
Kp = 10 Ki = 3 Kd = 10 |
1.531 |
0.1056 |
0.0339 |
0.0004 |
Table (4) shows that the ACO algorithm substantially exceed the PSO algorithm in terms of time domain performance, particularly for the maximum overshoot, rising time and settling time. Figures (10 and 11) depict a simulation of fractional order PID controller for the suggested system and the DC motor speed step response with FOPID controller using PSO algorithm respectively.
Figure 10. The block diagram system of DC motor with FOPID controller
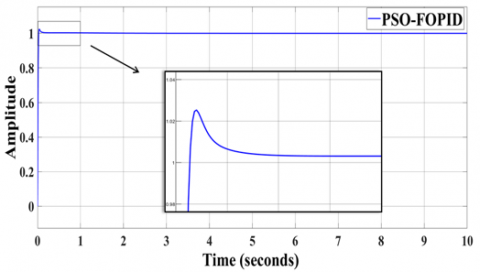
Figure 11. Step response of DC motor speed with PSO-FOPID controller
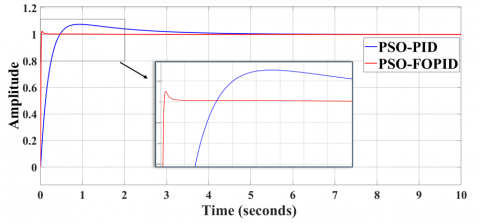
The dynamic features (settling time and overshoot) of the system response that were generated from the PSO-FOPID controller are much superior to features produced from the PID controller, as shown in Figure 12.
Figure 12. Step response of DC motor speed with PSO-PID and PSO-FOPID controllers
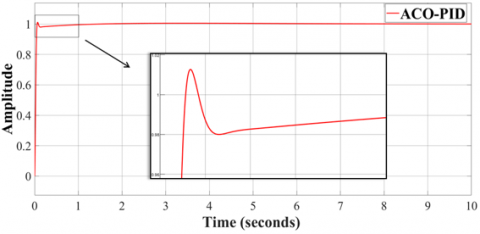
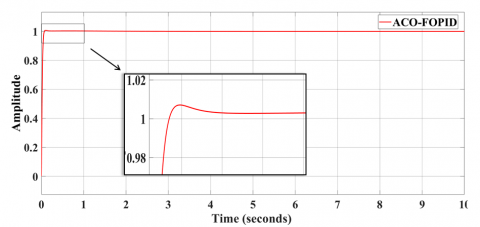
Figure 13. Step response of DC motor speed with ACO-FOPID controller
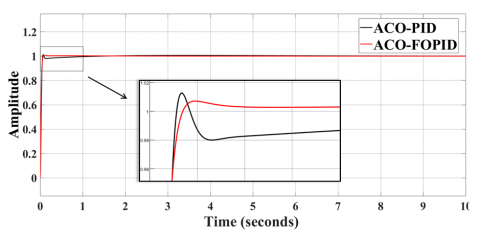
Figure 14. Step responses of DC motor with ACO-PID and ACO-FOPID controllers
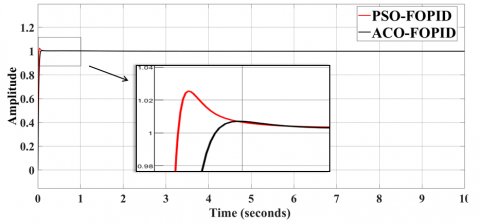
Figure 15. Step responses of DC motor with PSO-FOPID and ACO-FOPID controllers
The DC Motor speed step response using a FOPID controller and the ACO algorithm is shown in Figure 13.
As shown in Figure 14, the ACO-FOPID controller has higher reliability and offers superior tracking of a path than ACO-PID. Figure 15 shows a comparison of step response of DC motor speed with PSO-FOPID and ACO-FOPID controllers.
Taking into account all of the experiments results from the simulation, noise rejection, good performance and robustness can be achieved with the PSO-FOPID controller and it outperforms the ACO-FOPID controller in terms of performance as shown in Figure 15 and Table 5.
Table 5. Comparison between proposed algorithms results (fractional PID controller)
|
Method |
Kp |
Ki |
Kd |
$\lambda$ |
$\mu$ |
MP (%) |
Settling time (sec) |
Rise time (sec) |
Steady State Error |
|
PSO-FOPID |
36.227 |
42.5402 |
29.7227 |
0.582781 |
0.925838 |
2.557 |
0.01556 |
0.01537 |
0 |
|
ACO-FOPID |
11.2112 |
18.5922 |
13.9333 |
0.2919 |
0.9505 |
0505 |
0.0764 |
0.0337 |
0.0002 |
Table 6. The maximum overshoot values for systems responses with different noise signal values
|
Method |
MP (%) |
Noise power Value |
|||||
|
0.2 |
0.8 |
1 |
2 |
3 |
4 |
||
|
PSO-FOPID |
MP (%) |
2.577 |
2.577 |
2.577 |
3.035 |
3.491 |
4.052 |
|
ACO-FOPID |
MP (%) |
0.505 |
0.505 |
0.505 |
0.505 |
0.505 |
0.505 |
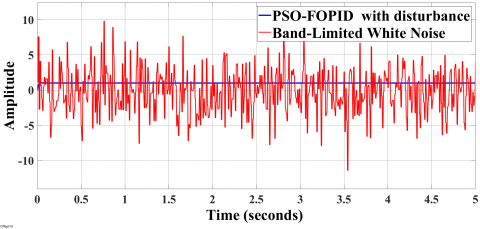
Figure 16. System response of DC motor with PSO-FOPID controllers with disturbance signal
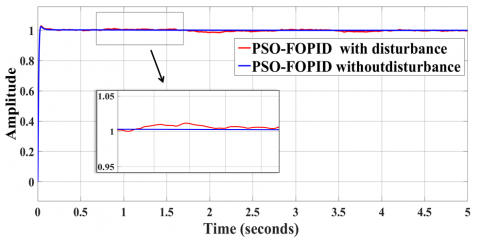
Figure 17. System response of a DC motor controlled by PSO-FOPID controllers with and without a disturbance signal
For checking the robustness of the system, a disturbance signal with (0.1) noise power was used, it was noted that the maximum overshoot of the disturbance signal was much higher than the maximum overshoot of the same disturbance signal after adding it to the system, which means that the controller has damped the noise signal by a percentage equals to (30%). From this, we conclude that the system has become more powerful and stable. Figure 16 illustrates this. Figure 17 depicts the effect of a disturbance supplied to the system using PSO-FOPID controller. In addition, when a disturbance signal was added to both controllers (ACO-FOPID and PSO-FOPID) they showed the same overshoot value in the two cases (with and without disturbance signal). Also, when the noise power value increased for PSO-FOPID system response, the maximum overshoot increased relatively. But for ACO algorithm, if noise power increased, the system will maintain the same overshoot value. Table (6) shows different noise signal values chosen to test the systems responses along with the obtained results.
According to the obtained results, FOPID controller enhances the system in terms of time and transient response, the required specifications (minimum overshoot, minimum settling time, minimum rise time, and minimum steady-state error) which have been also achieved, giving better and more accurate results. In addition, the PID contains the order 1 only for both the integral term and derivative term, but in FOPID, the controller may contain a range of orders between 0 and 1 which gives more flexibility in determining the parameters of the designed controller, that gives the system more expansion and flexibility.
Tuning the settings of the FOPID controller is a difficult task. If the success of tuning is inadequate, not only the performances of control deteriorate, but the control system will also become ineffective. In this research, it has proposed for controlling DC motor speed using FOPID controller based on PSO and ACO algorithms. The PSO and ACO algorithms were used to reduce the ITAE objective function using a unity feedback FOPID controller. Comparisons of performance with the typical PSO adjusted PID and FOPID (PSO-PID and PSO-FOPID) controllers, as well as newer methods, were undertaken to illustrate the efficacy of the proposed PSO-FOPID methodology. ACO-FOPID and ACO-PID were chosen as recent techniques in the literature since they utilised the same DC motor type. According to the findings of the comparison study, the suggested PSO-FOPID controller had the superior transient response and the frequency response is perfect in terms of settling time, rising time and ITAE, in addition to that the disturbance signal was damped when it was added, indicating the controller's strength and robustness. In future work, the non-linear FOPID controller can be used to further improve the system's response to external disturbances. In addition, the fuzzy logic can be used along with the FOPID controller for the purpose of increasing the robustness of the system.
|
PSO |
Particle Swarm Optimization |
|
ACO |
Ant Colony Optimization |
|
FOPID |
Proportional-Integral-Derivative |
[1] Hasan, F.A., Rashad, L.J. (2019). Fractional-order PID controller for permanent magnet DC motor based on PSO algorithm. International Journal of Power Electronics and Drive Systems, 10(4): 1724. https://doi.org/10.11591/ijpeds. v10.i4.1724-1733
[2] Chaiya, U., Kaitwanidvilai, S. (2009). Fixed structure robust DC motor speed control. Proceeding of the International Multiconference of Engineering and Computer Scientists, 2: 18-20.
[3] Nasri, M., Nezamabadi-Pour, H., Maghfoori, M. (2007). A PSO-based optimum design of PID controller for a linear brushless DC motor. World Academy of Science, Engineering and Technology, 26(40): 211-215.
[4] Abedulabbas, G.W., Yaseen, F.R. (2022). Design a PI controller based on PSO and GWO for a Brushless DC Motor. Journal Européen des Systèmes Automatisés, 55(3): 331-333. https://doi.org/10.18280/jesa.550305
[5] Idir, A., Kidouche, M., Bensafia, Y., Khettab, K., Tadjer, S.A. (2018). Speed control of DC motor using PID and FOPID controllers basedon differential evolution and PSO. Evolutionary computation, 11(4): 241-249. https://doi.org/10.22266/ijies2018.0831.24
[6] Ameen, N.M., Humod, A.T. (2020). Robust nonlinear PD controller for ship steering autopilot system based on particle swarm optimization technique. IAES International Journal of Artificial Intelligence, 9(4): 662. https://doi.org/10.11591/ijai. v9. i4. pp662-669
[7] Altinoz, O.T., Yilmaz, A.E. (2018). Optimal PID design for control of active car suspension system. International Journal of Information Technology and Computer Science (IJITCS), 10(1): 16-23. https://doi.org/10.5815/ijitcs.2018.01.02
[8] Al-Dhaifallah, M., Kanagaraj, N., Nisar, K.S. (2018). Fuzzy fractional-order PID controller for fractional model of pneumatic pressure system. Mathematical Problems in Engineering. https://doi.org/10.1155/2018/5478781
[9] Puangdownreong, D. (2019). Fractional order PID controller design for DC motor speed control system via flower pollination algorithm. ECTI Transactions on Electrical Engineering, Electronics, and Communications, 17(1): 14-23. https://doi.org/10.37936/ecti-eec.2019171.215368
[10] El-Saadawi, M.M., Gouda, E.A., Elhosseini,M.A., Essa, M.S. (2020). Identification and speed control of dc motor using fractional order pid: Microcontroller. European Journal of Electrical Engineering and Computer Science, 4(1): 1-8. https://doi.org/10.24018/ejece.2020.4.1.170
[11] Chiranjeevi, T., Babu, N.R., Yadav, A., Das, V.K., Prasad, S.C., Sonkar, A., Verma, S.K. (2021). Control of electric machines using flower pollination algorithm based fractional order PID controller. Global Transitions Proceedings, 2(2): 227-232. https://doi.org/10.1016/j.gltp.2021.08.057
[12] Vanchinathan, K., Selvaganesan, N. (2021). Adaptive fractional order PID controller tuning for brushless DC motor using artificial bee colony algorithm. Results in Control and Optimization, 4: 100032. https://doi.org/10.1016/j.rico.2021.100032
[13] Xue, D.Y., Zhao, C.N., Chen, Y.Q. (2006). Fractional order PID control of a DC motor with elastic shaft: A case study. In Proc. 2006 American control conference, pp. 3182-3187. https://doi.org/10.1109/ACC.2006.1657207
[14] Ibraheem, I.K., Ibraheem, G.A. (2016). Motion control of an autonomous mobile robot using modified particle swarm optimization based fractional order PID controller. Engineering and Technology Journal, 34(13): 2406-2419
[15] Shah, P., Agashe, S. (2016). Review of fractional PID controller. Mechatron- ics, 38: 29-41. https://doi.org/10.1016/j.mechatronics.2016.06.005
[16] Rastogi, A., Tiwari, P. (2013). Optimal tuning of fractional order PID controller for DC motor speed control using particle swarm optimization. International journal of soft computing and engineering (IJSCE), 3(2): 150-157.
[17] Abood, L.H., Oleiwi, B.K. (2021). Design of fractional order PID controller for AVR system using whale optimization algorithm. Indonesian Journal of Electrical Engineering and Computer Science, 23(3): 1410-1418. https://doi.org/10.11591/ijeecs.v23.i3.pp1410-1418
[18] Al-Araji, A.S., Rasheed, L.T. (2017). A cognitive nonlinear fractional order PID neural controller design for wheeled mobile robot based on bacterial foraging optimization algorithm. Engineering and Technology Journal, 35(3): 289-300. https://doi.org/10.30684/etj.35.3A.15
[19] Bouderres, N., Kerdoun, D., Djellad, A., Chiheb, S., Dekhane, A. (2022). Optimization of fractional order PI controller by PSO algorithm applied to a grid-connected photovoltaic system. Journal Européen des Systèmes Automatisés, 55(4): 427-438. https://doi.org/10.18280/jesa.550401
[20] Hekimoğlu, B. (2019). Optimal tuning of fractional order PID controller for DC motor speed control via chaotic atom search optimization algorithm. IEEE Access, 7: 38100-38114. https://doi.org/10.1109/ACCESS.2019.2905961
[21] Wheed, A., Issa, A.H. (2021). FPGA implementation of modified reconfigurable adaptive gain scheduling controller. Engineering and Technology Journal, 39(7): 1105-1116, https://doi.org/10.30684/etj.v39i7.1772
[22] Mohammed, R.I., Abbas, S.M., Issa, A.H. (2018). FPGA cyclone II based the mobile robot control system. In 2018 Third Scientific Conference of Electrical Engineering (SCEE), pp. 186-192. https://doi.org/10.1109/SCEE.2018.8684214
[23] Sultan, G.A., Sheet, A.F., Ibrahim, S.M., Farej, Z.K. (2021). Speed control of DC motor using fractional order PID controller based on particle swarm optimization. Indonesian Journal of Electrical Engineering and Computer Science, 22(3): 1345-1353. https://doi.org/10.11591/ijeecs.v22.i3.pp1345-1353
[24] Eberhart, R.C., Shi, Y. (2001). Particle swarm optimization: developments, applications and resources. In Proceedings of the 2001 Congress on Evolutionary Computation, CEC, 1: 81-86. https://doi.org/10.1109/CEC.2001.934374
[25] Mohamed, M.J., Hamza, M.K. (2019). Design PID neural network controller for trajectory tracking of differential drive mobile robot based on PSO. Engineering and Technology Journal, 37(12): 574-583. https://doi.org/10.30684/etj.37.12A.12
[26] Abood, L.H., Karam, E.H., Issa, A.H. (2018). FPGA implementation of single neuron PID controller for depth of anesthesia based on PSO. In 2018 Third Scientific Conference of Electrical Engineering (SCEE), pp. 247-252. https://doi.org/10.1109/SCEE.2018.8684186
[27] Dawood, Z.H., AL-Rubayi, R. (2021). Analysis of distribution system reconfiguration under different load demand in AL-KUT City by using PSO Algorithm. Engineering and Technology Journal, 39(5): 738-753. http//doi:10.30684/etj.v39i5A.1842
[28] Veysel G., Kevin M.P. (2011). Swarm Stability and Optimization. Springer Science +Business Media B.V.: 299. https://doi.org/10.1007/978-3-642-18041-5
[29] Prakash, A., Tiwari, M.K., Shankar, R. (2008). Optimal job sequence determination and operation machine allocation in flexible manufacturing systems: An approach using adaptive hierarchical ant colony algorithm. Journal of Intelligent Manufacturing, 19(2): 161-173. https://doi.org/10.1007/s10845-008-0071-y
[30] Arnaout, J.P. (2013). Ant colony optimization algorithm for the euclidean location-allocation problem with unknown number of facilities. Journal of Intelligent Manufacturing, 24(1): 45-54. https://doi.org/10.1007/s10845-011-0536-2
[31] Abdulakareem, M.I., Raheem, F.A. (2020). Development of path planning algorithm using probabilistic roadmap based on ant colony optimization. Engineering and Technology Journal, 38(3): 343-351. https://doi.org/10.30684/etj.v38i3A.389