OPEN ACCESS
Automatically locating the kidney region and segmenting the kidneys in MPI image are the first and very important steps for the whole renal function analysis flow. A method of automatically location the kidney based on Level Set with global prior shape was proposed. This method uses generalized super-ellipse as the prior shape information, and combines the gray features of the image, then evolve and segments using level set algorithm. The method proposed in this paper is test in our experiment using MR images. The results, evaluated on real data, show that this method is feasible and effective in kidney segmentation. It has also shown that the proposed method is easily applicable and well suited for kidney from MR images.
GFR, MPI, kidney segmentation, level set
Nowadays the analysis of the organ function based on medical image becomes has been a hot issue. Glomerular filtration rate (GFR) is used to evaluate important clinical indicator of renal function. A new tracer imaging modality called Magnetic Particle Imaging (MPI) was first presented in 2005 by Gleich and Weizenecker [1]. In recent years, there are more and more GFR measure researching reports based on MR images [2-6]. Because MR scan has no radiation, MR image has obvious advantages during the process of the multi-phase scan. The advantage of the measuring GFR based on imageology can measure the renal function in two different sides; namely, obtain the GFR values of left and right kidney respectively. It is an important step to extract the kidney in the MR image during the process of measuring the GFR values. The evaluation of the renal function need lots of various image data, such 3D multi-phase scan image, etc., hence doctor need manually segment the kidney in each phase image, which is tedious and time-consuming work for a doctor. In order to improve the doctor's working efficiency, one is challenging works to automation extract the kidney from MR image.
In the last two decades, researchers have developed many automated kidney extraction methods from the images, and they can be categorized into two type: the region-growing method and the active shape model method. Song et al. [7] propose a specific method to recognize and extract the kidney based on time sequence registration and organized contrast induced respond; Rusinek et al [8] propose a graph cut method to segment the kidney; Goceri [9] proposes an automatic kidney segmentation using Gaussian mixture model on MRI sequences.
In this paper, a kidney segmentation method from MR images was proposed using the level set algorithm with global prior shape. This method uses generalized super-ellipse as the prior shape information, and combines the gray features of the image, then evolve and segments using level set algorithm. The method proposed in this paper is test in our experiment using MR images. The experimental results show kidney can be segmented effectively by means of the proposed method.
2.1 The defination of prior shape
The shape of health man’s kidney is the lentils type, and the shape is similar with the generalized super-ellipse, hence we use the generalized super-ellipse as the prior shape information for the evolution of level set [10] [11]. The generalized super-ellipse equation is as following:
$\left|\frac{x}{\alpha_{1}}\right|^{\beta_{1}}+\left|\frac{y}{\alpha_{2}}\right|^{\beta_{2}}=1$ (1)
Where $\alpha_{1}, \alpha_{2}, \beta_{1}, \beta_{2}$ are the shape parameters. When $\beta_{1}=\beta_{2}=2$, the generalized super-ellipse is ellipse. In order to make the generalized super-ellipse have rotation, translation and scale features, the equation (1) is rewritten as
$\left|\frac{\left(x-T_{1}\right) \cos \gamma}{\alpha_{1} \times \rho}+\frac{\left(y-T_{2}\right) \sin \gamma}{\alpha_{1} \times \rho}\right|^{\beta_{1}}+\left|-\frac{\left(x-T_{2}\right) \sin \gamma}{\alpha_{2} \times \rho}+\frac{\left(y-T_{2}\right) \cos \gamma}{\alpha_{2} \times \rho}\right|^{\beta_{2}}=1$ (2)
Where γ is the rotation parameter, T1 and T2 are the translation parameter, ρ is the scale parameter. Hence the equation definition of the prior shape is as following equation
$\bar{\varphi}(x, y)=1-\left|\frac{\left(x-T_{1}\right) \cos \gamma}{\alpha_{1} \times \rho}+\frac{\left(y-T_{2}\right) \sin \gamma}{\alpha_{1} \times \rho}\right|^{\beta_{1}}$ $-\left|-\frac{\left(x-T_{2}\right) \sin \gamma}{\alpha_{2} \times \rho}+\frac{\left(y-T_{2}\right) \cos \gamma}{\alpha_{2} \times \rho}\right|^{\beta_{2}}$ (3)
Where $\bar{\varphi}(x, y)$ is the prior shape function, hence initial contour of the object and prior shape can be represented as following equation:
$E_{s h}\left(\varphi_{s}, \varphi_{P}\right)=\int_{\Omega}\left(\varphi_{s}(x, y)-\varphi_{P}(x, y)\right)^{2} d x d y$ (4)
Where $\varphi_{S}$ is the contour of the evolution , $\varphi_{P}$ is the contour of the prior shape.
2.2 The evolution of level set
Let u be an input image, and C be a curve in the image domain Ω. According to [12], segmentation is performed by evolving such that it minimizes the energy functional below:
$E\left(\varphi, c_{1}, c_{2}\right)=\lambda_{1} \int_{\Omega}\left(u_{0}(x, y)-u_{1}\right)^{2} H(\varphi) d x d y+$
$\lambda_{2} \int_{\Omega}\left(u_{0}(x, y)-u_{2}\right)^{2}(1-H(\varphi)) d x d y$
$+\mu \int_{\Omega} H(\varphi) d x d y+v \int_{\Omega} \delta(\varphi)|\nabla \varphi| d x d y+E_{s h}\left(\varphi_{s}, \varphi_{P}\right)$ (5)
where constants $u_{1}$ and $u_{2}$ are the averages of pixel value of input image $u$ inside $C$ and outside $C,$ respectively, and $\lambda_{l}$ $\lambda_{2}, \mu, v$ are non-negative weighted parameters. In this paper, $\lambda_{1}=\lambda_{2}=1, \mu=0, v=1 \cdot$ Function $\varphi(x, y)$ represents class $\Omega_{1}$ for $\varphi(x, y)>0$ and class $\Omega_{2}$ for $\varphi(x, y)<0,$ The equation definition of the prior shape is as following equation Heaviside $H(\varphi)$ function and one-dimensional Dirac function $\delta(\phi)$ are introduced to simplify the energy function.
$H(\phi)=\left\{\begin{array}{ll}1, & \phi \geq 0 \\ 0, & \phi<0\end{array} \quad \delta(\phi)=\frac{d H(\phi)}{d \phi}\right.$ (6)
The evolution of Ф is governed by the following motion partial differential equation to minimize energy functional E.
$\frac{\partial \phi}{\partial t}=\delta(\phi) \cdot\left[\mu \nabla \cdot \frac{\nabla \phi}{|\nabla \phi|}-v-\lambda_{1}\left[u_{0}(x, y)-c_{1}\right]^{2}+\lambda_{2}\left[u_{0}(x, y)-c_{2}\right]^{2}\right]$ (7)
Where the parameter c and c are obtained according to the following equation.
$c_{1}=\frac{\int_{\Omega} u_{0}(x, y) H(\phi) d x d y}{\int_{\Omega} H(\phi) d x d y} c_{2}=\frac{\int_{\Omega} u_{0}(x, y)[1-H(\phi)] d x d y}{\int_{\Omega}[1-H(\phi)] d x d y}$ (8)
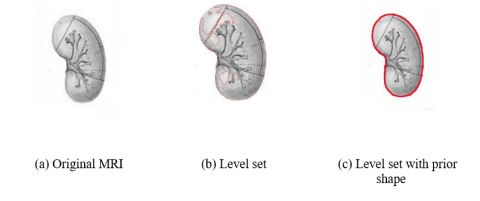
In this experimental part, we tested our kidney segmentation method on 10 MR images. This paper only shows a MRI as an example. Fig.1 shows the manually location of kidney. Fig.2 and Fig.3 show the evolution result of the left and right kidney contour respectively. From the figures (Fig.2 and Fig.3), the evolution contour of the proposed method is more complete and accurate than the level set method. It is evident that the proposed method is effective in kidney contour segmentation.
(a) Non-enhancement MRI (b) Enhancement MRI
Figure 1. Results of manually locating kidney
Figure 2. Evolution of the left-kidney contour
Figure 3. Evolution of the right-kidney contour
This paper has presented a kidney MRI segmentation method based on level set with prior shape. This method uses generalized super-ellipse as the prior shape information, and combines the gray features of the image, then evolve and segments using level set algorithm. The method proposed in this paper is tested in our experiment using MR images. The results, evaluated on real data, demonstrate that this method is feasible and effective in kidney segmentation. Compared with traditional level set segmentation algorithm, experimental results show that the proposed algorithm has more complete and accurate contour. In the future we intend to locate automatically the kidney region, which is better to automatically segment the kidney MRI.
1. Gleich B., Weizenecker R., Tomographic Imaging Using the Nonlinear Response of Magnetic Particles, Nature, vol.435, no.13, pp.1214–1217, 2005.
2. Mohamed E. A., Ahmed A. S. and Tarek A. E., Contrast Enhanced Spiral Computerized Tomography in Patients with Chronic Obstructive Uropathy and Normal Serum Creatinine: A Single Session for Anatomical and Functional Assessment, The Journal of Urology, vol.172, no.3, pp.985-988, 2004.
3. Hackstein N., Kooijman H. and Tomaselli S., Glomerular Filtration Rate Measured Using the Patlak Plot Technique and Contrast-Enhanced Dynamic MRI with Different Amounts of Gadolinium-DTPA, Journal of Magnetic Resonance Imaging, vol.22, no.3, pp.406-414, 2005.
4. Hackstein N., Wiegand C. and Rau W. S., et al., Glomerular Filtration Measured by Using Triphasic Helical CT with a Two-Point Patlak Plot Technique, Radiology, vol.230, no.1, pp.221-226, 2004.
5. Lee V. S., Rusinek H., Bokacheva L., et al., Renal Functionmeasurements from MR Renography and a Simplified Multicom-Partmental Model, American Journal of Physiology-Renal Physiology, vol.292, no.5, pp.1548-1559, 2007.
6. Zhang J. L., Rusinek H. and Bokacheva L., et al., Functional Assessment of the Kidney from Magnetic Resonance and Computed Tomography Renography: Impulse Retention Approach to a Multicompartment Model, Magnetic Resonance in Medicine, vol.59, no.2, pp.278-288, 2008.
7. Song T., Lee V. S., Rusinek H, et al., Integrated Four Dimensional Registration and Segmentation of Dynamic Renal MR Images, Medical Image Computing and Computer-Assisted Intervention, Copenhagen, pp.758-765, 2006.
8. Rusinek H., Boykov Y. and Kaur M., et al., Performance of an Automated Segmentation Algorithm for 3D MR Renography, Magnetic Resonance in Medicine, vol.57, no.6, pp.1159-1167, 2007.
9. Goceri E., Automatic Kidney Segmentation Using Gaussian Mixture Model on MRI Sequences, Electrical Power Systems and Computers, vol.99, no.1, pp.23-29, 2011.
10. L. X. Gong, S. D. Pathak, D. R. Haynor, P. S. Cho, Y. M. Kim, Parametric Shape Modeling Using Defonnable
11. Superellipses for Prostate Segmentation, IEEE Trans. Med. Imag., vol.23, no.3, pp.340-349, 2004.
12. L. Saroul, O. Bernard, D. Vray, D. Friboulet, Prostate Segmentation in Echographic Images: A Variational Approach Using Defonnable Super-Ellipse and Rayleigh Distribution, 5th IEEE International Symposium on Biomedical Imaging: From Nano to Macro, 2008, Paris, ISBI 2008, pp.129-132.
13. Spiegel M., Hahn D. A. and Daum V., et al., Segmentation of Kidneys Using a New Active Shape Model Generation Technique Based on Non-Rigid Image Registration, Computerized Medical Imaging and Graphics, vol.33, no.1, pp.29-39, 2009.