Indrajit Koley* | Asim Datta | Goutam Kumar Panda
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
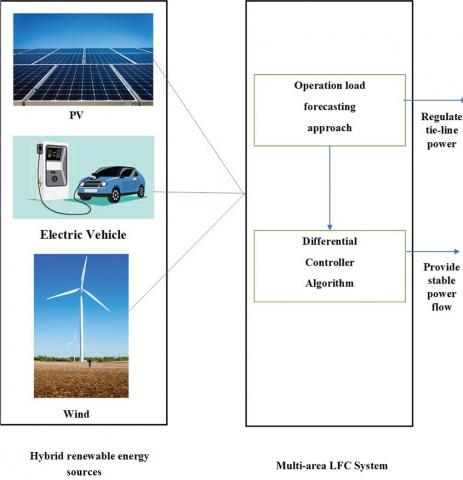
In order to ensure zero steady-state error in multi-area hybrid power systems, load frequency control is implemented in the power system. However, variations in load due to cyclic amplitude deviation create frequency fault leading to unscheduled tie-line power. Hence a novelOperational Load Forecasting Approach is utilized in which objective function in support vector regression predicts load demand and generation based on temporalcharacteristicsand utilize parallel processing to tolerate the acceptable error margin. Moreover, the uncertainties of active power generation in islanding mode make the estimation of frequency response deviation under decentralized islanding modes difficult. Hence a novelDifferential ControllerAlgorithm has been proposed in which the sigmoidal range function determines the optimal amplitude value from individual areasand the controller predicts the high load demand area that exceeds the threshold limit and isolatesthat area until the deviation is rectified. Low tie-line power, frequency, and settling time deviations were accomplished using the proposed methodologies as they were simulated using the Simulink platform.
load frequency control, renewable energy source, differential controller, objective function, support vector regression, sigmoidal range function
The utilisation of renewable energy to produce electricity is currently one of the best accessible alternatives due to the depletion of fossil fuel sources, rising pollution, and global warming [1, 2]. Despite the various benefits of renewable energy, there are issues with their stability that require careful control, particularly with regard to microgrids [3, 4]. Since the use of renewable energy is growing and RES use has risen exponentially over the world, it is one of the most extensively used inexpensive methods of energy production. The sustainability of microgrids, on the other hand, has emerged as one of the major issues facing the electrical sector. The microgrid frequency shifts as a result of the production-demand imbalance, so that if the load decreases and output increases, the generator tends to speed up and operate at a higher frequency, and if the volume increases and production declines, the generator tends to speed down and operate at a higher frequency. As a result, the microgrid frequency can be used as a gauge to maintain the true power balance [5-7].
Unpredictable internal and external disruptions of load generate an undesired mismatch between generation and load demand, and load variations induce a variation of the system operating frequency with interchange tie-line power flow from their planned limits [8]. In order to maintain system performance indicators, such as area frequency and interchange tie-line power, at their scheduled values, load frequency control, often known as LFC, has been proposed as a solution [9-11]. For the efficient and secure functioning of electrical power networks, LFC is undoubtedly one of the most lucrative ancillary services [12]. Its aim is to protect the neighboring control areas' steady-state errors at zero while rapidly reducing area frequency transient deviations and tie- line power flow interchanges [13]. It is becoming more and more essential to fulfill this objective in the modern world where many different types of energy producing units contribute to overall electricity generation in order to provide consumers with high-quality, eligible, and consistent electrical power [14].
If this frequency variation exceeds specified limits, it immediately affects the operation and dependability of the power system. Under normal circumstances, this frequency deviation is low and manageable [15]. Load frequency control (LFC), which strikes a balance between load demand and generation, is used in producing stations to keep frequency in a region within its designated range [16]. Due to the fact that the power system contains multiple generators connected by tie lines to interchange power, it can withstand more loads and malfunctions [17]. Every time the load demand varies in a connected power system, the frequency and tie-line power exchange also change. As a result, the LFC problem in an interconnected system becomes more difficult because in this case, LFC is directly related to frequency maintenance and minimising tie-line exchange error between different generating units at scheduled values so that frequency variance in each area is maintained and it is within its boundaries [18, 19]. Consistent frequency and contractual energy exchange between various areas is necessary for the efficient running of the power system [20]. The current methods, however, result in frequency error under steady-state conditions and unscheduled tie-line power under load-side disturbances, nonlinearities, and system frequency deviations. Also, increased diffusion of renewable resources, along with filtering and line impedances, leads to active power production in islanding mode to be unpredictable. Therefore, a technique for performing load frequency regulation in a power system must be developed.
Following are the paper's main contributions:
In order to stabilize and reduce frequency error in the load frequency control mechanism, this research maintains stable frequency modulation and reduces centralised islanding circumstances. Following is an overview of the paper's content: The study is divided into five sections: section 1 is the introduction; section 2 is related work; section 3 is novel solutions; section 4 is implementation results and comparison; and section 5 is the conclusion.
Shouran et al. [21] in their paper suggested a Sliding Mode Control (SMC) concept for Load Frequency Control (LFC) in a two-area electrical power system. Depending on the researched system's properties, the mathematical model design for the SMC is generated. The Bees Algorithm (BA), an optimization technique, is offered in this study as a means of fine-tuning the SMC's parameters in order to accomplish the proposed controller's best possible utilisation. By providing a load disturbance of 0.2 pu in region one, the dynamic performance of the power system with SMC applied for LFC is investigated. To demonstrate the superiority of the proposed controller, the outcomes are contrasted with those of recently published works based on Fuzzy Logic Control (FLC) tuned by Teaching-Learning-Based Optimization (TLBO) algorithm and the conventional PID optimised by Lozi map-based Chaotic Optimization Algorithm (LCOA). Further work is needed to apply the suggested SMC design for LFC in systems that use renewable energy sources and take some nonlinear factors like the Governor Deadband and the Generation Rate Constraint (GRC) into consideration (GDB).
Javanmardi et al. [22] in their work built a contraction observer while taking attack mitigation into consideration when designing a dynamic output feedback controller (DOFC) for LFC in micro grids (MGs). Bilinear matrix inequalities (BMIs) are proposed as a new way of expressing the necessary and sufficient conditions for the DOFC design problem, and we aim to reduce the frequency deviation caused by variations in load, solar, and wind energy. The suggested formulation successfully transforms the issue into a new BMI model that can be easily divided into two problems: one is a convex optimization problem, and the remaining portion is a quadratic matrix inequality problem that is linearized around the possible solution of the Linear Matrix Inequality (LMI) part by a Taylor-like expansion. Future research should take time- delay and other LFC implementation concerns into account while constructing the high-performance controller.
Çelik et al. [23] in their paper described the use of a cascade controller with a fractionally ordered proportional integral and derivative (FOPI-FOPD) for load frequency control (LFC) of electrical power generating systems. The suggested controller consists of fractionally ordered PI and PD controllers that are connected in cascade, where the orders of the integrator (k) and differentiator (l) are both possible. By reducing the integral time absolute error (ITAE) of frequency and tie-line power deviations, the gains and fractional order parameters of the controller are simultaneously optimised using the suggested dragonfly search algorithm (DSA). In addition, plug-in electric vehicles (PEV) and High voltage direct current (HVDC) links could be added to the examined models as ancillary services in addition to and parallel to the current AC tie-line.
Li et al. [24] presented a data-based defence strategy. First, the frequency is derived using the Cyber-Physical Model of LFC. In order to recover missing measurements, a prediction model based on the model is used in conjunction with a hierarchical attention network. Then, rather than using variable LFC techniques, the suggested method may identify and mitigate the effects of DoS assaults by comparing and replacing the data. Three different power generation systems are then the subject of simulation trials. Future study will employ dependable resistive DoS attacks even with subpar samples.
Alayi et al. [25] explored how a multi-source microgrid with renewable energy sources behaved in terms of load frequency control (LFC). The system's frequency needs to remain consistent in order to provide a reliable power supply. In order to manage the frequency of the microgrid in island mode, a proportional-integral-derivative (PID) controller is proposed. The performance metric employed is the integral of squared time is multiplied by error squared (ISTES). When optimising the nonlinear problem of load and frequency controller design, the adoption of the Craziness-Based Particle Swarm Optimization (CRPSO), an upgraded version of Particle Swarm Optimization (PSO), speeds up convergence. To achieve greater stability, it is necessary to switch the type of controllers and apply metaheuristic algorithms.
Arya et al. [26] introduced a hybrid fuzzy fractional-order proportional integral-fractional order proportional derivative (FFOPIFOPD) controller as an expert control approach for handling AGC efficiently in separate and connected multi-area power systems. An invented imperialist competitive algorithm (ICA) that uses the integral of squared error criterion is used to maximise the output gains and other FFOPI-FOPD controller parameters, such as the integrator and differentiator order. To show the potential and extensibility of this method, it is first applied to a single-area thermal system before being enlarged to two-area hydro-thermal and three-area thermal power systems. In addition to the output SFs, this controller's input SFs need to improve. Also, some optimization approaches may be used to improve the controller.
From the survey, for [21] Future work is needed to implement the suggested SMC design for LFC in systems that use renewable energy sources and take some nonlinear factors like the Governor Dead band and the Generation Rate Constraint (GRC) into consideration (GDB). For [22] For developing the high-performance controller, it is advised to take time-delay and other LFC implementation concerns into account [23]. Plug-in electric vehicles (PEV) and high voltage direct current (HVDC) links could also be incorporated into the examined models as an auxiliary service in addition to and parallel with the current AC tie-line, for [24] Future study will employ dependable resistive DoS attacks even with inferior samples and [25] Metaheuristic methods must be used in addition to different controller types for improved stability. [26] to enhance the controller's performance, an optimization technique is needed. Hence to overcome all the above- mentioned issues a novel topology has to be implemented.
In a power system, an LFC's duties include handling nonlinearities in the case of several areas, preserving zero steady-state error during frequency fluctuations in the system, and avoiding load side disturbances. However, the overlying variations to steady-state conditions with loads in terms of cyclic amplitude deviation create frequency error leading to unscheduled tie-line power.As a result, to achieve environmental efficiency in multi-area hybrid renewable energy penetration, It is necessary to have a decentralised load management and forecasting system that is accurate.Hence a novelOperational Load Forecasting Approach is adopted where the load generation and demand for distinct areasconcerning the intermittent characteristics are taken into account using an objective function that corresponds to forecasted load for the period of operation in non-islanding condition with support vector regression based on temporal dependence, tolerance adjustments for mistakes that exceed the permissible error rate should be made when using parallel processing and taking into account multiple areas. Additionally, the decentralized RES power system experiences line interruptions as a result of the increased penetration level of renewable resources with filters and line impedance. This instability in active power production results from islanding mode.Due to this, the estimation of total power flow deviation with other areas under decentralized islanding modes becomes critical. Hence the frequency variation of the microgrid is mitigated by adopting a novelDifferential ControllerAlgorithm whichutilizes the steady-state conditions of the generating sources, the overlying variations concerning loads with the consideration of cyclic amplitude deviation of the frequency response to determine the optimal value of amplitude from the distinct areas using sigmoidal range functions. Whenever the predicted threshold limit gets exceeded the controller predicts the maximum load demand area from the forecast and it is isolated from the system until the deviation is nullifiedand thereby maintaining stable frequency modulation and mitigating centralized islanding conditions.
Figure 1. Architecture of proposed system
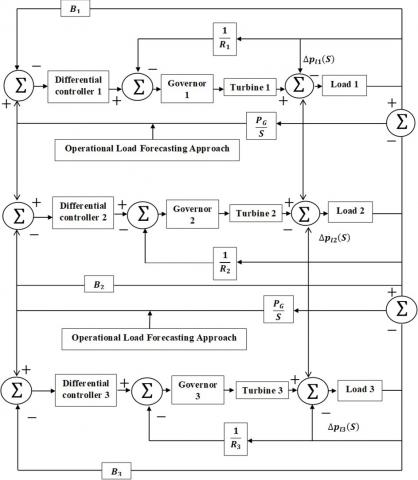
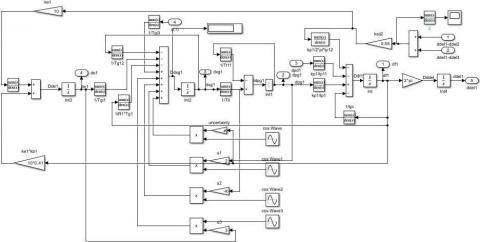
Figure 2. Proposed multi-area load frequency control system
Figure 2 depicts proposed multi-area LFC system. Load frequency control in renewable energy penetrated hybrid power systemsconsists of several controller units, turbines and governorwith speed limiter and biasing module which are connected with the help of tie lines and the unscheduled tie- line power is regulated through operational load forecasting approach and the differential controller in multi-area system perform well in islanding mode by separating high load demand area from the system.Thus the implementation of the controller controls the load frequency deviation of renewable energy resources of a multi-area integrated microgrid power system with mitigated load side disturbances, nonlinearities with scheduled tie-line power, and mitigating centralized islanding conditions.
3.1 Operational load forecasting approach
Operating an islanded microgrid is difficult since renewable energy production is sporadic. They introduce uncertainty into the output voltage and frequency control. As a result, in order to achieve eco-efficiency in multi-area hybrid renewable energy penetration, it is necessary to have an accurate load forecasting and load management system with a decentralised character. Therefore, a novel operational load forecasting approach is used, adopting three area load frequency control with hybrid renewable energy sources such as electric vehicle, solar cell, and wind energy. Operational Load Forecasting Approach removes the unscheduled tie-line power and is tolerable for acceptable error margin by the consideration of discontinuous characteristics of load and period when the load is predicted. This approach avoids load-side disturbances and frequency deviation in non-isolating conditions. The objective function is typically calculated as the sum of frequency deviations in system segments with acceptable balancing factors in frequency control problems involving power systems. To achieve the control goal, the objective function is used to reduce microgrid frequency deviation.
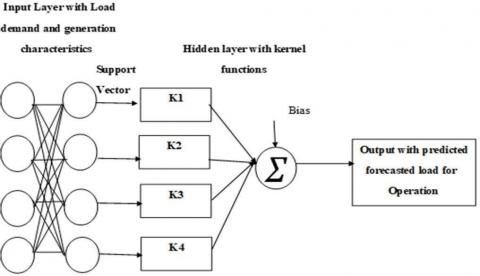
Figure 3. Support vector regression based load forecasting
The regression function in the regression analysisfor load forecasting is based on the restricted observation data. Therefore, to calculate the power system's dynamic frequency following a disruption, support vector regression (SVR) is being used.The Support vector regression model takes the inputs related to loading and the input layer process the recurrent characteristics of load demand and load generation input vector form. Then, these input vectors are converted into support vectors and the hidden layer uses a kernel function to process the input support vectors of load characteristics by utilizing weights and objective function to provide load deviation prediction output based on forecasted time details.
Consider a set of training data $\left(g_m, h_m\right)$ obey the probability distribution $P(g, h)\left(g \in R^n, h \in R\right)$. SVR find real-valued function $f(g)=\rho * \emptyset\left(g_i\right)+a$ to fit training points by making,
$R(f)=\int c(g, h, f) d P(g, h)$ (1)
where, c is the loss function
For unknown values of P(g, h) and R(f), the minimization of P(g, h) and R(f) are considered which is given by,
$E(\rho)=\frac{1}{2}(\rho . \rho)+C \frac{1}{m} \sum_{i=1}^m\left|h_i-f\left(g_i\right)\right|_{\varepsilon}$ (2)
where, $\left|h_i-f\left(g_i\right)\right|_{\varepsilon}=\max \left\{0,\left|h_i-f\left(g_i\right)\right|, \varepsilon\right\}$ is the $\varepsilon$-insensitive loss function.
The objective function in the support vector regression considers the load demand, load generation to provide load forecasting based on temporal dependence. The objective function employed in Support vector regression to provide acceptable frequency error margin is given by,
$O(f)=\frac{1}{2} \alpha^{\prime} \alpha+C \sum_{i=1}^n\left(\varepsilon_i+\varepsilon_i^*\right)$ (3)
where,
O(f) is the objective function
C is the constant with load related constraints
$\varepsilon_i$ is the epsilon margin to prevent overfitting
The linear $\varepsilon$-insensitive loss function treats deviations that are within a certain distance of the observed valueas zero and ignores them. The distance between the observed value h and the Eboundary is used to calculate the loss. This is properly defined as follows:
$l_{\varepsilon}=\left\{\begin{array}{cc}0 & \text { if }|h-f(g)| \leq \varepsilon \\ |h-f(g)|-\varepsilon & otherwise\end{array}\right.$ (4)
where,
$l_{\varepsilon}$ is the linear insensitive loss function
h is observed value
f(g) is a linear function of input values
The prediction of operational load forecasting based on load demand, load generation, and temporal dependence using an objective function in support vector machine has been made, and thereby proper prediction of load frequency level is predicted and this prediction is done for multiple areas in the load frequency control system using parallel processing in which multiple different forms of information are processed at the same time. Thereby, made the system tolerant for an acceptable range of frequency errors and offer load- and temporal dependence-based prediction while fine-tuning the tolerance for errors that surpass that acceptable error rate.However, a stable power output is not maintained by Operational Load Forecasting Approach since the next subsection is adopted to provide stable power output with the mitigation of centralized islanding conditions.
3.2 Differential controller algorithm
Prediction of load demand and generation during forecasting while regulating the errors outside acceptable levelshas been done in the load forecasting approach. The frequency variation of the micro grid is reduced by utilising a special Differential Controller Algorithm since it is crucial to maintain a constant power output after the forecast.This algorithm considers the steady-state condition and overload condition of the generating sources and determinesthe variation of frequency response from steady-state to overload condition based on cyclic amplitude deviation.
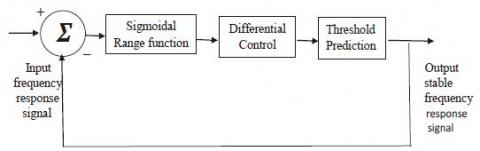
Figure 4. Differential control with sigmoidal function based amplitude prediction
Sigmoidal range functions are used to determine the optimal value of cyclic amplitude in frequency response from individual areas. Because its range (0, 1) and domain are the set of all real numbers, the sigmoid function is often referred to as a squashing function. Any integer between $-\infty$ and $+\infty$ is the same.The sigmoid function is applied to the input data during the sigmoid activation procedure. Thesigmoidal range function is given by,
$\mu(n y)=\frac{1}{1+e^{-n y}}$ (5)
In which, $n>0$ by specifying the derivative in the form $\mu^{\prime}(n y)=n \mu(1-\mu)>0$ as a result, µ is a monotonic function that increases gradually.The slope amplitude of the function at the origin is determined by the value of n, which can convert the functional behaviour from a gradually increasing transition $(\mathrm{n} \rightarrow 0)$ to a unit step function $(\mathrm{n} \rightarrow \infty)$. By modifying the slope of the sigmoid at the zero control point, the variable parameter n enables changing the amplitude rise and decay characteristics of the sigmoid range function. Thus, in a multi-area system, the input frequency response signal is used to calculate the ideal value of the cyclic amplitude using the sigmoidal range function.
The differential controller gets the determined optimal amplitude value in distinct areas from sigmoidal range functions. The differential controllerin standard form with its derivative filter is given by,
$D_c=g_p\left(1+\frac{1}{T_e S}+\frac{T_f S}{\frac{T_e}{M} S+1}\right)$ (6)
where, gp is proportional gain
Te andTf are integral and derivative times
M is a first-order derivative filter divisor
To build a legitimate differential controller in standard form, filter divisor and integral timesmust be real as well as positive, and also proportional gain and derivative time must be non-negative, real, and finite.
The Eq. (6) can be rewritten in an equivalent expression that contains two integrators which are given by,
$D_c=g_p\left(1+\frac{1}{T_e} I(Z)+\frac{T_f}{\frac{T_e}{M}+D(Z)}\right)$ (7)
where, I (Z) and D (Z) are the discrete integrator formulas for the integrator and derivative filter.
$I(Z)=D(Z)=\frac{T_S}{Z-1}$, thereby providing a stable derivative pole.
The threshold prediction module in the differential controller predicts the area with maximum load demand above the threshold limit and isolates that particular area until the load demand attains the threshold limit. Hence, the differential controller performs well in isolation conditions.
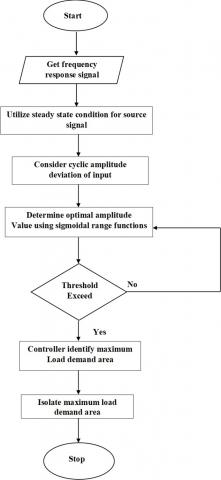
Figure 5. Flowchart of differential controller algorithm
The following are the steps that make up the differential controller algorithm:
Overall, two main strategies to control the load frequency deviation of a multi-area integrated microgrid power system with stable frequency modulation and mitigating centralised islanding state are used in renewable energy penetrating hybrid power systems.Operational load forecasting approach utilizes the objective function of support vector regression to predict forecasting load demand and generation and makes frequency deviation at an acceptable level. Then, the Differential controller algorithm determinesthe amplitude deviation of response signals using the sigmoidal range function and isolates the area with high load demand. The outcomes of load frequency control in hybrid power systems that incorporate renewable energy are explained in depth in the next section.
This part includes a comparison section to make sure the suggested system functions as promised, along with a full discussion of the implementation results and the proposed system's performance.
4.1 Experimental setup
The following system specification was used to implement this study in the MATLAB/SIMULINK working platform, and the simulation results are given below.
OS : Windows 7
Processor : 64-bit Intel processor
RAM : 8 GB RAM
Platform : MATLAB/SIMULINK
4.2 Results obtained from proposed LFC in renewable energy penetrated hybrid power systems
Figure 6 illustrates the simulated performance of a multi- area LFC hybrid power system. An electric car, a solar cell, and a wind area are three of the renewable energy sources that are connected in a hybrid power system between three areas in the simulated output using a tie-line. Support vector regression module is included in multi-area LFC hybrid power system to provide accurate load forecasting and load management system using objective function and temporal dependence characteristics. Differential controller module predicts and isolates the high load demand area using sigmoidal range functions to provide stabilized frequency modulation.
Figure 6. Simulated output of multi-area LFC hybrid power system
Figure 7 demonstrates the simulated performance of a single-area LFC hybrid power system. In a single area, differential controller module, generator module, and turbine module are included with the load. To regulate frequency deviation and predict proper load forecasting in transmission lines, Operational load forecasting approach has been used. Differential controller in the single area regulate frequency response and isolate that area when more load demand is predicted.
Figure 7. Single-area LFC hybrid power system's simulated output
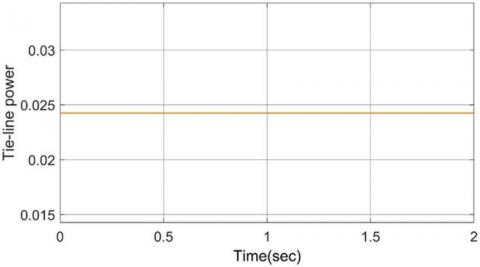
Figure 8. The proposed system's tie-line power
Figure 8 demonstrates the proposed system's tie-line power. The proposed technology keeps the tie-line power constant at 0.024 during a time range of 0.001 to 2 seconds. Implementing an operational load forecasting technique that manages forecasting load with a tolerable degree of error using support vector regression-based prediction, the suggested system's tie- line power is kept at an appropriate level.
Figure 9. The system's planned control signal
The system's planned control signal is shown in figure 9. The control signal is achieved in a time range from 0.1 to 2 seconds in a constant level as depicted in figure 9. The control signal is provided by Differential controller algorithm in which the differential controller predictsan area that requires more load demand based on threshold limit using the sigmoidal range function.
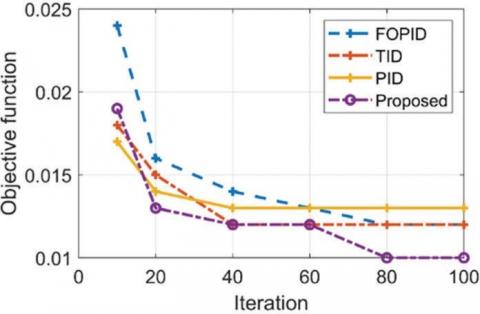
Figure 10. Comparison of objective function
Figure 10 shows an evaluation of the proposed system's proposed system's objective function against existing methods. An objective function of the proposed system is 0.01 at 100 iterations whereas the objective function of FOPID [27], TID [27], and PID [27] are 0.012, 0.012, and 0.013 respectively at 100 iterations. While PID has a high goal function, the proposed system has a low one. The objective function is minimized using support vector regression based quick prediction of load forecasting characteristics.
Figure 11. Tie-line power deviation comparison
Figure 11 compares the suggested work's tie-line power deviation to that of earlier techniques such as FOPID [28], TID [28], and PID [28]. In comparison to FOPID, the suggested system's tie-line power deviation is 0.002 pu[28], TID [28], and PID [28] are 0.008 pu, 0.006 pu, and 0.006 pu respectively. The proposed work has a low tie-line power deviation of 0.002 pu because the operational load forecasting approach removes unanticipated tie-lines by accurately estimating load demand over a certain time period in parallel.
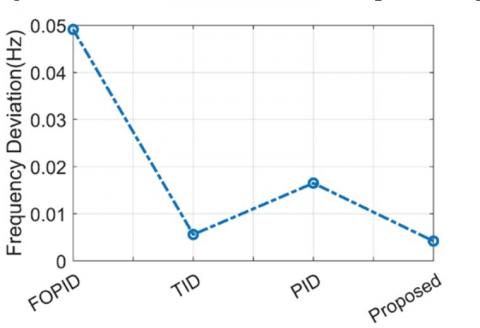
Figure 12. Comparison of frequency deviation
The frequency deviation for the load frequency control in renewable energy penetrated hybrid power systemsis shown in Figure.12. Frequency deviation was compared to existing models such as FOPID [29], TID [29], and PID [29] as shown in figure.11. It is clear from the graph that frequency deviationis minimized in the proposed than other techniques. The frequency deviation of the proposed system is 0.0042Hz whereas the frequency deviation of FOPID [29], TID [29], and PID [29] are 0.0491Hz, 0.0056Hz, and 0.0165Hzrespectively. Frequency deviation is minimized in operational load forecasting approach which regulates error margin to tolerable level using support vector regression.
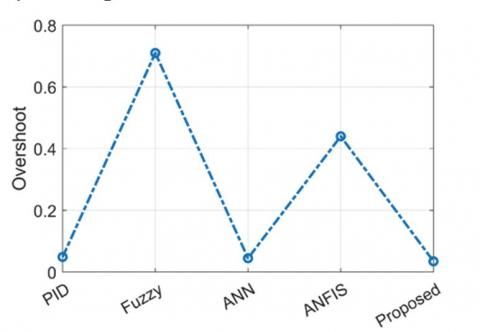
Figure 13 compares the proposed system's overshoot to that of existing methods. The overshoot of the proposed system is 0.035 whereas the overshoot of PID [30], fuzzy [30], ANN [30], and ANFIS [30] are 0.049, 0.71,0.045, and 0.44 respectively. Overshootof the proposed system is low whereas overshoot of fuzzy techniqueis high. Overshoot is reduced by differential controller algorithm which eliminate overlying fluctuations to steady state conditions with loads by measuring optimal cyclic amplitude value.
Figure 13. Comparison of overshoot
Figure 14. Comparison of setting time
Figure 14 depicts a comparison of the setting time of the proposed system with existing techniques. The setting time of the proposed system is 7.25 seconds whereas the setting time of PID [30], fuzzy [30], ANN [30], and ANFIS [30]are 26 s, 13 s, 17 s, and 15 s respectively. The setting time of a proposed system is low whereas the setting time of PID is high. Settling time of proposed work is reduced using operational load forecasting approach and differential controller algorithm in which load demand of multi-area system is predicted quickly and high load demand area is isolated based on threshold level using sigmoidal range function.
Overall the proposed system outperforms the existing techniques such as FOPID, TID, , PID,fuzzy, ANN, and ANFIS with objective function of 0.01, low tie-line power deviation of 0.002 pu, low frequency deviation of 0.0042Hz, low overshoot of 0.035and lowsetting time of 7.25 seconds.
In this research, load frequency control in renewable energy penetrated hybrid power systems has been proposed which predict load forecasting using Operational load forecasting approach based on temporal characteristics using objective function in support vector regression with acceptable frequency deviation and the power is stabilized by isolating areas that require more power based on threshold limit using differential controller algorithm in which amplitude deviation was predicted through sigmoidal range function.The proposed system achieved the stabilized tie-line power of 0.024 and low settling time of 7.25 seconds. The proposed load frequency control in renewable energy penetrated hybrid power systems outperforms all other existing techniques with low objective function of 0.01, low-frequency deviation of 0.0042, low tie- line power deviation of 0.002, and low overshoot of 0.035.
|
c |
loss function |
|
ε |
insensitive loss function |
|
O(f) |
objective function |
|
C |
constant with load related constraints |
|
εi |
epsilon margin to prevent overfitting |
|
lε |
linear insensitive loss function |
|
h |
observed value |
|
f(g) |
linear function of input values |
|
µ(ny) |
sigmoidal range function |
|
µ |
monotonic function |
|
gp |
proportional gain |
|
Te and Tf |
integral and derivative times |
|
M |
first-order derivative filter divisor |
[1] Alayi, R.; Seydnouri, S.; Jahangeri, M.; Maarif, A. Optimization, Sensitivity Analysis, and Techno- Economic Evaluation of a Multi-Source System for an Urban Community: A Case Study. Renew. Energy Res. Appl. 2021. https://doi.org/10.22044/rera.2021.10752.1054
[2] Bouznit, Mohammed, María del P. Pablo-Romero, and Antonio Sánchez-Braza. "Measures to promote renewable energy for electricity generation in Algeria" Sustainability 12.4 (2020): 1468. https://doi.org/10.3390/su12041468
[3] Alayi, R.; Ahmadi, M.H.; Visei, A.R.; Sharma, S.; Najafi, A. Technical and environmental analysis of photovoltaic and solar water heater cogeneration system: A case study of Saveh City. Int. J. Low-Carbon Technol. 2021, 16, 447–453. https://doi.org/10.1093/ijlct/ctaa077
[4] Vasilakis, Athanasios, et al. "The evolution of research in microgrids control." IEEE Open Access Journal of Power and Energy 7 (2020): 331-343. https://doi.org/10.1109/OAJPE.2020.3030348
[5] Alayi, R.; Khan, M.R.B.; Mohmammadi, M.S.G. Feasibility Study of Grid-Connected PV System for Peak Demand Reduction of a Residential Building in Tehran, Iran. Math. Model. Eng. Probl. 2020, 7, 563–567. https://doi.org/10.18280/mmep.070408
[6] Karami, A.; Roshani, G.H.; Khazaei, A.; Nazemi, E.; Fallahi, M. Investigation of different sources in order to optimize the nuclear metering system of gas–oil–water annular flows. Neural Comput. Appl. 2018, 32, 3619– 3631. https://doi.org/10.1007/s00521-018-3673-0
[7] Katiraei, F.; Iravani, M.R.; Lehn, P.W. Micro-Grid Autonomous Operation During and Subsequent to Islanding Process. IEEE Trans. Power Deliv. 2005, 20, 248–257. https://doi.org/10.1109/TPWRD.2004.835051
[8] Alayi, R.; Jahangeri, M.; Monfared, H. Optimal location of electrical generation from urban solid waste for biomass power plants. Anthropog. Pollut. J. 2020, 4, 44– 51. https://doi.org/10.22034/AP.2020.1903832.1069
[9] Roshani, M.; Sattari, M.A.; Ali, P.J.M.; Roshani, G.H.; Nazemi, B.; Corniani, E.; Nazemi, E. Application of GMDH neural network technique to improve measuring precision of a simplified photon attenuation based two- phase flowmeter. Flow Meas. Instrum. 2020, 75, 101804. https://doi.org/10.1016/j.flowmeasinst.2020.101804
[10] Shangguan, Xing-Chen, et al. "Robust load frequency control for power system considering transmission delay and sampling period." IEEE Transactions on Industrial Informatics 17.8 (2020): 5292-5303. https://doi.org/10.1109/TII.2020.3026336
[11] Luo, Haocheng, Ian A. Hiskens, and Zechun Hu. "Stability analysis of load frequency control systems with sampling and transmission delay." IEEE Transactions on Power Systems 35.5 (2020): 3603-3615. https://doi.org/10.1109/TPWRS.2020.2980883
[12] Ali, A.Y.; Basit, A.; Ahmad, T.; Qamar, A.; Iqbal, J. Optimizing coordinated control of distributed energy storage system in microgrid to improve battery life. Comput. Electr. Eng. 2020, 86, 106741. Sustainability 2021, 13, 10728 13 of 14 https://doi.org/10.1016/j.compeleceng.2020.106741
[13] Zhao, X.; Lin, Z.; Fu, B.; Gong, S. Research on frequency control method for micro-grid with a hybrid approach of FFR-OPPT and pitch angle of wind turbine. Int. J. Electr. Power Energy Syst. 2021, 127, 106670. https://doi.org/10.1016/j.ijepes.2020.106670
[14] Javed, A.; Ashraf, J.; Khan, T. The Impact of Renewable Energy on GDP. Int. J. Manag. Sustain. 2020, 9, 239– 250. https://doi.org/10.18488/journal.11.2020.94.239.250
[15] Li, P.; Guo, T.; Han, X.; Liu, H.; Yang, J.; Wang, J.; Yang, Y.; Wang, Z. The optimal decentralized coordinated control method based on the H performance index for an AC/DC hybrid microgrid. Int. J. Electr. Power Energy Syst. 2021, 125, 106442. https://doi.org/10.1016/j.ijepes.2020.106442
[16] Sun, Y.;Wu, X.;Wang, J.; Hou, D.;Wang, S. Power Compensation of Network Losses in a Microgrid with BESS by Distributed Consensus Algorithm. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2091–2100. https://doi.org/10.1109/TSMC.2020.2968605
[17] Aguilar, M.E.B.; Coury, D.; Reginatto, R.; Monaro, R.M. Multi-objective PSO applied to PI control of DFIG wind turbine under electrical fault conditions. Electr. Power Syst. Res. 2020, 180, 106081. https://doi.org/10.1016/j.epsr.2019.106081
[18] Jia, Y.; Huang, T.; Li, Y.; Ma, R. Parameter Setting Strategy for the Controller of the DFIG Wind Turbine Considering the Small-Signal Stability of Power Grids. IEEE Access 2020, 8, 31287–31294. https://doi.org/10.1109/ACCESS.2020.2973281
[19] Ahmed, M.M.; Hassanein,W.S.; Elsonbaty, N.A.; Enany, M.A. Proposing and evaluation of MPPT algorithms for high-performance stabilized WIND turbine driven DFIG. Alex. Eng. J. 2020, 59, 5135–5146. https://doi.org/10.1016/j.aej.2020.09.043
[20] Prajapat, G.P.; Senroy, N.; Kar, I. Estimation based enhanced maximum energy extraction scheme for DFIG- wind turbine systems. Sustain. Energy Grids Netw. 2021, 26, 100419. https://doi.org/10.1016/j.segan.2020.100419
[21] Shouran, Mokhtar, Fatih Anayi, and Michael Packianather. "The Bees Algorithm Tuned Sliding Mode Control for Load Frequency Control in Two-Area Power System." Energies 14.18 (2021): 5701. https://doi.org/10.3390/en14185701
[22] Javanmardi, Hamidreza, et al. "BMI-based Load Frequency Control in Microgrids Under False Data Injection Attacks." IEEE Systems Journal (2021). https://doi.org/10.1109/JSYST.2021.3054947
[23] Çelik, Emre. "Design of new fractional order PI– fractional order PD cascade controller through dragonfly search algorithm for advanced load frequency control of power systems." Soft Computing 25.2 (2021): 1193- 1217. https://doi.org/10.1007/s00500-020-05215-w
[24] Li, Yuancheng, Rong Huang, and Longqiang Ma. "Hierarchical Attention based Defense Method for Load Frequency Control System against DoS Attack." IEEE Internet of Things Journal (2021). https://doi.org/10.1109/JIOT.2021.3073060
[25] Alayi, Reza, et al. "Optimal load frequency control of island microgrids via a PID controller in the presence of wind turbine and PV." Sustainability 13.19 (2021): 10728. https://doi.org/10.3390/su131910728
[26] Arya, Yogendra. "A new optimized fuzzy FOPI-FOPD controller for automatic generation control of electric power systems." Journal of the Franklin Institute 356.11 (2019): 5611-5629. https://doi.org/10.1016/j.jfranklin.2019.02.034
[27] Mohamed, Emad A., et al. "An optimized hybrid fractional order controller for frequency regulation in multi-area power systems." IEEE Access 8 (2020): 213899-213915. https://doi.org/10.1109/ACCESS.2020.3040620
[28] Guha, Dipayan, Provas Kumar Roy, and Subrata Banerjee. "Load frequency control of large scale power system using quasi-oppositional grey wolf optimization algorithm." Engineering Science and Technology, an International Journal 19.4 (2016): 1693-1713. http://dx.doi.org/10.1016/j.jestch.2016.07.004
[29] Ahmed, Emad M., et al. "Optimum modified fractional order controller for future electric vehicles and renewable energy-based interconnected power systems." IEEE Access 9 (2021): 29993-30010. https://doi.org/10.1109/ACCESS.2021.3058521
[30] Lal, Deepak Kumar, and Ajit Kumar Barisal. "Combined load frequency and terminal voltage control of power systems using moth flame optimization algorithm." Journal of Electrical Systems and Information Technology 6.1 (2019): 1-24. https://doi.org/10.1186/s43067-019-0010-3