OPEN ACCESS
In this paper, active suspension system is controlled using PID controller with adapted reference point. After the derivation of quarter car suspension model. Three approaches were applied: passive suspension system, active suspension system with constant reference and with adapted reference. The proposed approach was focusing on system life span; how to reduce brutal controller actions, that can cause car body damage, and ensure a certain ride comfort? Simulation of three approaches has been done using quarter car system and MATLAB simulation model to implement the proposed technique and compare performance variation in different cases: road bump and other road disturbances. Through this study, it was found that the proposed active suspension model may serve as an interesting benchmark for several profound studies on filter model and controller design.
active suspension system, PID controller, quarter car model, passive suspension system
Conventionally, automotive suspension designs have to compromise between three criteria; road holding, load carrying and passenger comfort. Usually, the suspension must support the vehicle, improve handling while steering, and assure a certain isolation of passengers and loads from road disturbances. Therefore, Good ride needs a soft suspension whereas applied load requires stiff suspension. According to ISO 2631-1 standard, exposing the human body to vibrations with frequencies between 0.5-80 Hz could probably cause a great risk of injury to the vertebrae in the lumber region and the nerves connected to these segments (Chamseddine et al., 2006).
Due to these conflicting demands, suspension design had to be determined by the type of use for which the vehicle was designed. However, Active suspensions are considered a way to auto adapt suspension stiffness according to the road needs. Therefore, Active suspension is a very fertile topic with new innovations each year.
In 1991, (Sunwoo, 1991) proposed a model reference adaptive control (MRAC) technique for vehicle active suspension system. In 1995, (Alleyne and Hedrick, 1995) worked on active suspension control using nonlinear adaptive control. In 2004, (Kruczek and Stribrsky, 2004) and (Rossi and Lucente, 2003) used
control design; the first worked on Active Suspension with linear motor, and the second worked on semi-active suspension. In 2006, (Sam and Hudha, 2006) and (Chamseddine et al., 2006) worked on Active Suspension control and design, the first worked on modelling and force tracking control of hydraulic actuator, and the second worked on sliding mode techniques. In 2009, (Eski and Yildirim, 2009) worked on vibration control of vehicle active suspension system using a new robust neural network control system. And (Hyniova et al., 2009) worked on optimizing energy efficiency of linear electric motor based active suspension system. In 2011, (Conde and Carbajal, 2011) used Generalized Proportional Integral (or GPI) design to control quarter-car active suspension system. In 2012, (Choudhury and Sarkar, 2012) compared Passive Suspension with PID controller based Active Suspension system. In 2013, (Li et al., 2013) used adaptive sliding-mode control problem for nonlinear active suspension systems via the Takagi-Sugeno (T-S) fuzzy approach. Finally, in 2017, (Jamil et al., 2017) presented a comparison between passive, proportional-integral-differential (PID) and multi-order PID (MOPID) controlled active suspensions.Two common assumptions are taken into account in all these works; constant reference for all control techniques, and vehicle representation using so-called ’quarter car’ model (Crolla, 1996). In this work, adaptive reference is proposed to reduce brutal controller actions that can cause damage to the vehicle system.
The remainder of this paper is organized as follows: Section 2 introduces mathematical model of vehicle, disturbance, etc. Section 2 presents the PID controller used to control suspension. Section 3 describes model simulation and comparison between passive suspension and active suspension with constant and adapted reference. Section 4 analyzes simulation results. Finally, Section 5 concludes the work with general study of performances of different techniques, and future works.
In this part, a full model of the suspension dynamics and road disturbances is described. This shall describe the full model for a rigorous computer simulation study to be carried out. The mathematical model for suspension system is given using the Newtonian mechanics, the suspension system is model based on a quarter car configuration.
The active suspension system is designed and model using the feedback control element embedded into the system. For simplification purposes, the active system is modeled as an action applied directly to the chassis and the tire.
2.1. Quarter car
Quarter car model (Wilson et al., 1986) is frequently used for suspension system analysis and design due to its simplicity and yet ability to present many important parameters. Extension to one-half car model has been described in (Rossi and Lucente, 2003) and full car model in (Eski and Yildirim, 2009).
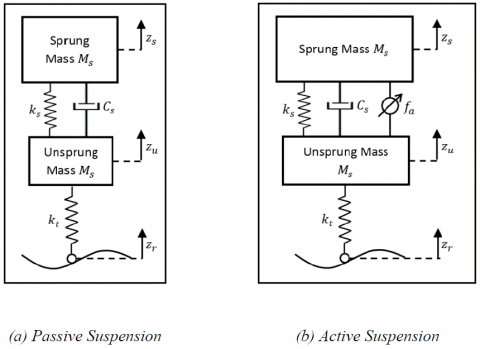
Figure 1a presents Quarter passive car suspension system. Car body is denoted as sprung mass and the tire is denoted un-sprung mass. Single wheel axle is connected to the quarter portion of the car body through a passive spring and damper. The tire is assumed to have only the spring constant and is in permanent contact with the road at the other end. The road serves as an external disturbance to the system.
Based on Newtonian mechanics, the equations of the motion for the passive suspension system are given as (Mailah and Priyandoko, 2005):
$m_{S} \frac{d^{2} z_{S}}{d t^{2}}=-k_{S}\left(Z_{S}-Z_{u}\right)-C_{S}\left(\frac{d z_{S}}{d t}-\frac{d z_{u}}{d t}\right)$ (1)
$m_{u} \frac{d^{2} z u}{d t^{2}}=-k_{s}\left(z_{s}-z_{u}\right)+k_{t}\left(z_{u}-z_{r}\right)+C_{s}\left(\frac{d z_{s}}{d t}-\frac{d z_{u}}{d t}\right)$ (2)
Where:
$\boldsymbol{Z}_{\boldsymbol{r}}$ Road displacement
$\boldsymbol{Z}_{\boldsymbol{s}}$ Car body displacement
$\mathbf{z}_{\boldsymbol{u}}$ Un-sprung mass displacement
$\boldsymbol{C}_{\boldsymbol{s}}$ Damping coefficient
$\boldsymbol{m}_{\boldsymbol{s}}$ Sprung mass
$\boldsymbol{m}_{\boldsymbol{u}}$ Un-sprung mass
$\boldsymbol{k}_{\boldsymbol{s}}$ Spring stiffness constant
$\boldsymbol{k}_{t}$ Tire stiffness constant
Quarter car model for active suspension system can be obtained by adding an actuator parallel to spring and damper. Figure 1b shows a schematic of a quarter car model for active suspension system.
The equations of motion for active suspension system are given as (Mailah and Priyandoko, 2005):
$m_{S} \frac{d^{2} z_{S}}{d t^{2}}=-k_{S}\left(z_{S}-z_{u}\right)-C_{S}\left(\frac{d z_{S}}{d t}-\frac{d z_{u}}{d t}\right)+f_{a}$ (3)
$m_{u} \frac{d^{2} z_{u}}{d t^{2}}=-k_{s}\left(z_{s}-z_{u}\right)+k_{t}\left(z_{u}-z_{r}\right)+C_{s}\left(\frac{d z_{s}}{d t}-\frac{d z_{u}}{d t}\right)-f_{a}$ (4)
Where, $f_{a}$ is the actuator force.
Figure 1. Quarter car system
2.2. Disturbance model
A road bump will be used as a disturbance to the vehicle system in this work. The bump was assumed as a sinusoidal form. Some works (Sam and Hudha, 2006; Conde and Carbajal, 2011) used a road disturbance in function of time, this type of bump does not take into account the vehicle speed. However, in our work, we will study the case of different car speeds.
The following figure illustrates the dimension of the disturbance model according to (Choudhury and Sarkar, 2012):
Figure 2. Disturbance model
2.3. Filter model
For standard passive suspension systems, if the comfort is improved, then handling stability is deteriorated. This problem is the main reason why active suspension systems are used. However, most active suspension systems (Choudhury and Sarkar, 2012; Conde and Carbajal, 2011; Sunwoo, 1991) aim to bring car body into equilibrium value, which always needs high energy, or in some cases, can cause damage to the tire and/or suspension system. Therefore, in this work, the active suspension tries to bring car body to comfortable situation according to tire movements in such way that annoying frequencies must be eliminated (according to (Kruczek and Stribrsky, 2004), they can be ranged between 4 and 8 Hz).
Figure 3. Proposed Active suspension system
The filter was chosen in such way to ensure a comfortable ride and taking into account sudden displacements. The figure bellow shows the step response of the proposed filter. For a step disturbance, the desired displacement must stabilize after about 1 second so the passengers will feel a minor annoyance.
The filter transfer function is as follows:
$F(s)=\frac{50}{s^{2}+15 s+50}$ (5)
2.4. Model parameters
Modeling parameters are taken for a sedan vehicle. The parameters used in the study are taken from (Conde and Carbajal, 2011):
Table 1. Vehicle parameters
|
Parameter name |
Parameter symbol |
Value |
|
Sprung mass (kg) |
$m_{s}$ |
282 kg |
|
Unsprung mass (kg) |
$m_{u}$ |
45 kg |
|
Tire stiffness constant (N/m) |
$k_{t}$ |
165790 N/m |
|
Spring stiffness (N/m) |
$k_{s}$ |
17900 N/m |
|
Damping constant (N.s/m) |
$C_{t}$ |
1000 N.s/m |
With these parameters and the given cinematic equations, and with assuming that the initial values are zero. The system can be written as follows:
$Z_{S}(S)=\frac{1000 s+17900}{282 s^{2}+1000 s+17900} Z_{u}(s)+\frac{1}{282 s^{2}+1000 s+17900} f_{a}(s)$ (6)
$z_{u}(s)=\frac{165790}{45 s^{2}+1000 s+183690} z_{r}(s)+\frac{1000 s+17900}{45 s^{2}+1000 s+183690} z_{s}(s)$
$-\frac{1}{45 s^{2}+1000 s+183690} f(s)$ (7)
3.1. Measurements required
As in (Conde and Carbajal, 2011), the only required variable for implementation of the proposed controller are the vertical displacement of the body of the car $z_u$ , and the vertical displacement of the wheel $z_s$ . These variables are needed to control actuator according to measured values.
3.2. Sensors
In (Chamseddine et al., 2006), the use of sensors in experimental and commercial vehicles is detailed. The most common sensors used for measuring the vertical displacement of the body and the wheels, are laser sensors (Conde and Carbajal, 2011). Accelerometers and other sensors that measure $z_u$ and $z_s$ are not needed since it is possible to integral reconstruct them from the knowledge of body and wheel displacements.
The schematic diagram of the instrumentation of active suspension system is illustrated as follows:
Figure 4. Schematic diagram of the instrumentation of the active suspension system
3.3. Linear electric motor
Figure 5. GSM series electric linear actuator by EXLAR
In (Hyniova et al., 2009), Linear electric motor has been used as an actuator to generate needed forces. Figure 5 shows an example of a commercialized linear motor (GSM Series by Exlar). The main interest of linear motors is that they directly translate electrical energy into usable linear mechanical force and motion.
Linear motor movements take place with high velocities (more than 1000 mm/s), large accelerations (up to g multiples), and forces (up to 10 kN). However, there is an important question whether the linear motor model could be omitted or not? The answer is ’yes’ (Hyniova et al., 2009). Both electrical and mechanical constants are small (just above 1 ms).
PID controller has been widely used in industry because of its simplicity and effectiveness. Despite many uses of the PID controller, its standard structure has constant gain parameters and is not good to decrease velocity control error (Eski and Yildirim, 2009). Therefore, exponential function is added to derivate component of conventional PID controller.
The used PID controller was adapted from (Eski and Yildirim, 2009) and can be described as follows:
$f_{a}(t)=G \cdot\left(K_{p} e(t)+K_{i} \int e(t) d t+K_{d} \frac{d e(t)}{d t}\left(K_{N} e^{-K_{N} t}\right)\right)$ (8)
Where $K_{p}, K_{i}, K_{d}$ and $K_{N}$ are the PID controller gains.
Random tuning technique has been used to optimize controller parameters using step response that will be analyzed later. The Fitness function, that has to be minimized, is defined as follows:
$J=\frac{1}{T} \int_{0}^{T}\left(z_{s}-z_{f}\right)^{2} d t \times \frac{1}{T} \int_{0}^{T}\left(z_{c}-z_{u}\right)^{2} d t$ (9)
With $Z_{f}$ is filter output for Active Suspension with adapted reference. For the constant reference, $Z_{f}$
is assumed to be zero. And T is the simulation period, which in our case equals to 5 seconds. Method of trial and error is used to determine the parameters of PID controller.After 5000 iterations, the parameters for adapted reference (left), and constant reference (right) were set to:
$\left\{\begin{aligned} G &=15000 \\ K_{p} &=4.9336 \\ K_{i} &=4.7032 \\ K_{d} &=0.4736 \\ K_{N} &=283.5086 \end{aligned}\right.$ (10)
$\left\{\begin{array}{c}{G=15000} \\ {K_{p}=4.9751} \\ {K_{i}=4.9489} \\ {K_{d}=0.3614} \\ {K_{N}=414.1968}\end{array}\right.$ (11)
To validate the proposed control technique, the mathematical model is transformed to computer simulation model. As in (Choudhury and Sarkar, 2012), model variable-step continuous solver (ODE45 or Dormand-Prince) is used which is based on an explicit Runge-Kutta formula. It is a one-step solver; so, to compute $y\left(t_{n}\right)$
, it needs only the solution in the immediately preceding time point $y\left(t_{n-1}\right)$ .5.1. Passive suspension system
The passive suspension system was modeled in Simulink as shown in Figure 6. this model was built using the equations 1 and 2 by supposing that there is no external actuator ($\boldsymbol{f}_{\boldsymbol{a}}=\boldsymbol{0}$). The model has one input (
$\mathbf{Z}_{\boldsymbol{r}}$) and two outputs ($z_{s}$ and $z_{u}$).Figure 6. Passive Suspension system simulation model
5.2. Active suspension system with constant reference
Active suspension system requires actuator force to provide external control, the goal of this actuator to provide a better ride and handling. The force fa is given by a PID controller that aims to bring the body position (
$z_{s}$) to constant value (zero). The Simulink model was built based on equations 3 and 4. The system has one input ( $z_{r}$) and three outputs ( $z_{s}, z_{u}$ and $f_{a}$ ).Figure 7. Active suspension system with constant reference
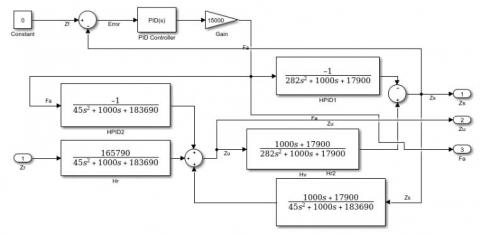
5.3. Active suspension system with adapted reference
As it is seen, the previous Active suspension system tries to bring the car body to the position that ensures comfortable ride without taking into account sudden road disturbances that can cause damage to the wheel and/or suspension system. The following configuration, the actuator tries to bring car body to a comfortable ride in accordance with wheel displacements.
Figure 8. Active suspension system with adapted reference
In the simulation, two cases were taken into account: different car speed and different road disturbances. Comparisons of the car body displacement and needed force for different case are discussed.
6.1. Different car speed
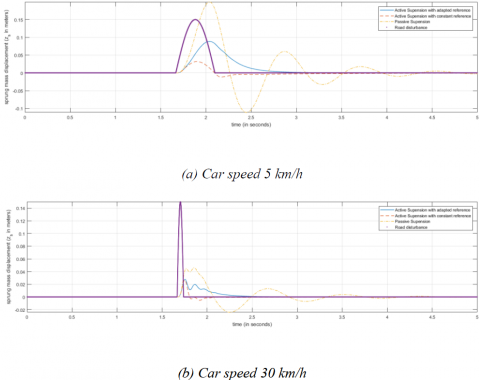
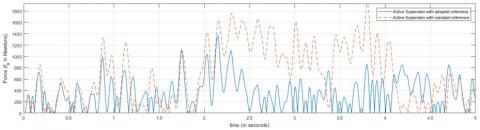
For this case, road disturbance presented in Figure 2 is taken as reference and car speed will by varied for the three suspension systems. Figure 9 shows the displacement of sprung mass for different speed to show the speed influence into car displacement and Figure 10 shows actuator force for different speeds.
Figure 9. Body displacement for different car speeds
From results, it can be seen that passive Suspension System suffers from high displacement rates (up to 20 cm) for low speeds. Though, the classical active suspension system reduced disturbance to 3 cm, and the proposed system gave a displacement up to 5 cm. However, if the car speed is increased, the body displacement for the three systems are similar. Moreover, the proposed system needed less force for small speeds. This is due to the control system that tries to reduce disturbance with taking into account sudden vibrations.
Figure 10. Actuator force for different car speeds
To have a more elaborate idea on the tested techniques, the following table contains a comparison between different results:
Table 2. Displacement, force and wheel deformation for different speeds
|
Speed (km/h) |
Maximum displacement speed (m/s) |
Maximum Force (N) |
Wheel deformation (cm) |
||||||
|
Passive |
Active 1 |
Active 2 |
Passive |
Active 1 |
Active 2 |
Passive |
Active 1 |
Active 2 |
|
|
5 |
1.2035 |
0.2534 |
0.3857 |
/ |
3002.1 |
1798.9 |
2.06 |
2.04 |
1.94 |
|
15 |
0.9409 |
0.5924 |
0.5797 |
/ |
4695.2 |
3677.5 |
5.42 |
6.20 |
5.79 |
|
25 |
0.9531 |
0.7153 |
0.6473 |
/ |
4964.5 |
4219.2 |
11.53 |
14.59 |
14.28 |
|
35 |
0.8652 |
0.6396 |
0.6198 |
/ |
4572.9 |
4096.9 |
17.19 |
19.27 |
19.25 |
|
45 |
0.7547 |
0.5640 |
0.5609 |
/ |
4017.7 |
3736.3 |
16.70 |
17.80 |
17.84 |
|
55 |
0.6546 |
0.5014 |
0.4970 |
/ |
3497.9 |
3327.9 |
14.72 |
15.55 |
15.59 |
Table 2 is comparison between studied systems for different car speeds from 5 km/h to 55 km/h. the studied systems are passive suspension (Passive), Active Suspension with constant reference (Active 1) and Active Suspension with adapted reference (Active 2). the presented parameters are:
$\boldsymbol{w}_{\boldsymbol{d}}=\left|\mathbf{z}_{\boldsymbol{u}}-\mathbf{z}_{\boldsymbol{u}}\right|$
Figure 11. Maximum displacement speed and force for different car speeds
Two aspects can be retrieved from Table 2:
To have more approximate view of body speed influence on systems, Figure 11 shows maximum displacement speed and maximum exerted force for different car speeds.
6.2. Different road disturbances
In this case, the systems were tested for different road types: random disturbance, road bumps, step, ramp, etc. this comparison is used to study control robustness for different inputs.
6.2.1. Random disturbance
The first case is random disturbance with given maximum acceleration ( $\ddot{z}_{r m a x}=100^{m} / s^{2} \approx 10 G$ ). It can be seen (from Figure 12) that passive suspension system moves with high velocity (up to 0.591 m/s). While active suspension with constant reference moves with low speed (0.139 m/s vs. 0.254 m/s for our approach). However, if we observe the force efficiency (Figure 13), active suspension with adapted reference needed less force (30% less).
Figure 12. Random disturbance ( $\ddot{\mathbf{z}}_{r m a x} \approx 10 G$ )
Figure 13. Actuator force for random disturbance ( $\ddot{\mathbf{z}}_{r m a x} \approx 10 G$ )
6.2.2. Step input
The second test was made using step input (final value = 10 cm). In this case, the disturbance is a sudden displacement of 10 cm, it can be seen that passive suspension has large displacement speed (up to 0.712 m/s) and overshoot (up to 16 cm) which causes ride inconvenience. However, active suspension with constant reference tries to stay at zero reference, which needs a lot of energy (see exerted force in Figure 15). Moreover, the proposed approach has less displacement speed (up to 0.481 m/s vs 0.478 m/s for classic Active Suspension) and needed less maximal force (up to 15% less).
Figure 14. Step response (final value = 10 cm)
Figure 15. Actuator force for step respond (final value = 10 cm)
This study intended to present a new approach to control active suspension system of a quarter car system. Simulation results shows that the technique performs better than passive suspension system for different disturbances. However active suspension system with constant reference gave better results compared to the proposed technique, this is due to the controller tending to bring the body displacement to constant value which is the best comfort option. Though, this last technique does not take into account brutal road displacements that can cause system damage. Therefore, the proposed technique tries to bring the car body to a certain comfort which takes into account sudden road displacement in such way to assure a certain ride comfort. Although, the study has some limitations:
-Improving PID controller design and use other controllers (e.g. Fractional Order PID (Jamil et al., 2017), or Fuzzy PID (Du et al., 2017)) to improve system results.
-Try adaptive control techniques for the case where system parameter changes like body weight.
-Improve filter design so it can be adapted for different road profiles.
-Quarter car suspension give a simple representation of car suspension. However, a more elaborate model would be closer to the real car suspension.
Experimental work is also needed to evaluate the proposed technique with real system parameters.
Alleyne A., Hedrick K. J. (1995). Nonlinear adaptive control of active suspensions. IEEE Transactions on Control Systems Technology, Vol. 3, No. 1, pp. 94-101. http://doi.org/10.1109/87.370714
Chamseddine A., Noura H., Raharijaona T. (2006). Control of linear full vehicle active suspension system using sliding mode techniques. In IEEE International Conference on Control Applications. http://doi.org/10.1109/CACSD-CCA-ISIC.2006.4776831
Choudhury S. F., Sarkar R. M. A. (2012). An approach on performance comparison between automotive passive suspension and active suspension system (PID controller) using MATLAB/Simulink. Journal of Theoretical and Applied Information Technology, Vol. 43, No. 2, pp. 295-300.
Conde E. C., Carbajal F. B. (2011). Generalized PI control of active vehicle suspension systems with MATLAB. Applications of MATLAB in Science and Engineering, pp. 335-352. http://doi.org/10.5772/23746
Crolla D. A. (1996). Vehicle dynamics: theory into practice. In Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, Vol. 210, No. 2, pp. 83-94. http://doi.org/10.1243/PIME_PROC_1996_210_250_02
Du H., Xiong W., Xu C., Jiang Z. (2017). Research on the controllability and energy saving of the pneumatic direct drive system. International Journal of Heat and Technology, Vol. 35, No. 4, pp. 997-1004. http://doi.org/10.18280/ijht.350436
Eski I., Yildirim S. (2009). Vibration control of vehicle active suspension system using a new robust neural network control system. Simulation Modelling Practice and Theory. Vol. 17, No. 5, p. 778-793. http://doi.org/10.1016/j.simpat.2009.01.004
Hyniova K., Stribrsky A., Honcu J., Kruczek A. (2009). Active suspension system – energy control. IFAC Proceedings Volumes, Vol. 42, No. 19, pp. 146-152. http://doi.org/10.3182/20090921-3-TR-3005.00027
Jamil F., Abdullah M., Ridzuan M., Ibrahim M., Ahmad F. (2017). Multi-order PID control for a simple suspension system. In Proceedings of Innovative Research and Industrial Dialogue’16, pp. 143-144
Kruczek A., Stribrsky A. (2004). control of automotive active suspension with linear motor. IFAC Proceedings Volumes, Vol. 37, No. 14, p. 365-370. http://doi.org/10.1016/S1474-6670(17)31131-X
Li H., Yu J., Hilton C., Liu H. (2013). Adaptive sliding-mode control for nonlinear active suspension vehicle systems using T-S fuzzy approach. IEEE Transactions on Industrial Electronics, Vol. 60, No. 8, pp. 3328-3338. http://doi.org/10.1109/TIE.2012.2202354
Mailah M., Priyandoko G. (2005). Simulation of a suspension system with adaptive fuzzy active force control. International Journal of Simulation Modeling, Vol. 6, No. 1, pp. 25-36. http://doi.org/10.2507/IJSIMM06(1)3.079
Rossi C., Lucente G. (2003). control of automotive semi-active suspensions. IFAC Symposium on Advances in Automotive Control, Vol. 37, No. 22, pp. 559-564. http://doi.org/10.1016/S1474-6670(17)30402-0
Sam Y. M., Hudha K. (2006). Modelling and force tracking control of hydraulic actuator for an active suspension system. 2006 1ST IEEE Conference on Industrial Electronics and Applications. http://doi.org/10.1109/ICIEA.2006.257242
Sunwoo M. (1991). Model reference adaptive control for vehicle active suspension systems. IEEE Transactions on Industrial Electronics. Vol. 38, No. 3, pp. 217-222. http://doi.org/10.1109/41.87590
Wilson D. A., Sharp R. S., Hassan S. A. (1986). The application of linear optimal control theory to the design of active automotive suspension. Vehicle System Dynamics: International Journal of Vehicle Mechanics and Mobility, Vol. 15, No. 2, pp. 105-118. http://doi.org/10.1080/00423118608968846