Kumutha Duraisamy*![]() | Baskaran Shanmugam
| Baskaran Shanmugam![]() | Nithya MohanRam
| Nithya MohanRam![]() | Priya Chinniah
| Priya Chinniah![]() | Jasmin Mohamed Mohideen
| Jasmin Mohamed Mohideen![]() | Ayeswarya Ramalingam
| Ayeswarya Ramalingam![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Brushless DC motors (BLDC) motor fault detection has recently attracted a lot of interest. Asymmetrical conditions result from the three-phase current waveforms being distorted by interturn failures in BLDC motors. This paper presents an Artificial Neural Network (ANN)-based fault classification approach to locate faults in Brushless Direct Current (DC) Motors and introduces a straightforward and effective way to identify inter-turn problems. Hall effect sensors are used to orient the rotor and measure the motor's current and speed. The PWM generator (ANN fault classification technique) analyses various fault instances and quickly diagnoses defective signals. The proportional integral (PI) controller is utilized to execute the BLDC motor speed management, improving drive. The proposed FFD approach can be easily applied in conventional drive systems because of the diagnostic algorithm's compactness. The project is carried out using simulation in Matlab. The outcomes support the proposed method's superior precision and rapidity of fault identification.
BLDC motor, interturn fault, modal current, ANN, FFD
BLDC motors have garnered interest as a significant drive method in recent days. These motors have great torque, a high power factor, and reliability. Considering the extensive use of BLDC motors, continuous condition tracking and fault diagnosis are essential for enhancing dependability and continuous functioning [1, 2]. One of the most common defects in BLDC motors is the stator winding inter-turn SC, which is brought on by an insulation flaw. Due to its potential for fast growth and motor breakdown, this problem poses a serious threat to BLDC motors. A rapid and reliable online diagnosis of this issue is essential because of this. To diagnose BLDC motor faults, several methodologies have been proposed so far [3]. In the study [4], search coil sensors were employed to get the required outcomes. Changes in the magnetic field are being used to find faults by inducing voltage in the search coils. Electric motors are now a necessary component of contemporary industrial and manufacturing processes. The motors are frequently used in adverse settings with high temperatures and loads. Motor defects may result from these forces and the aging of components. When a breakdown happens, it typically leads to lost production, downtime, and expensive repairs. Thus, condition tracking that results in problem identification and treatment in electric motors are very important and has drawn a lot of attention in recent years. The FDD method involves keeping an eye out for indications of defects or degradation in equipment so that repairs or maintenance may be done to stop system breakdowns.
In Fault Detection and Diagnosis (FDD), monitoring is a crucial factor [4]. In manufacturing processes, PMBLDC is frequently utilized. A BLDC motor typically comprises a rotor with permanent magnets and a stator with three-phase armature windings. Commutation in BLDC motors is accomplished by utilizing power electronics in conjunction with data on rotor position via hall sensors. The mechanical commutator of traditional brushed DC motors, which is subject to surface wear and electric arcing, is absent from BLDC motors. A continuous magnetic field is created by the rare earth magnets on the BLDC motor's rotor, which results in excellent power factor and performance. The plan should utilize current signals and require the fewest extra sensors possible. Additionally, it must prevent false positives, be dependable, and give a prompt and accurate signal of developing problems. Two FDD strategies were created and used to a permanent magnet synchronous motor in this work. The FDD approaches were confirmed by physically replicating fault circumstances on a Permanent Magnet Brushless DC Motor to show their efficacy. Although this technology produces great precision, low-power motors cannot afford to use it [5]. Furthermore, the approach cannot be regarded as a generic strategy for various BLDC motor types. In the studies [6, 7], a parameter estimation-based method was presented. Input impedance is another possibility to identify the issue. The approach has several benefits, but its primary downsides are a heavy computational need and a large input requirement. Rotation speed, input current, input voltage, resistance, and inductance are required by the system in order to detect the issue, making its implementation challenging and nearly impossible [7].
Various BLDC motors can utilize electromagnetic torque signals to diagnose interturn faults. These technologies are difficult to use because it is difficult to get the electromagnetic torque signal [8]. In general, recognizing faults may also be done using the frequency pattern of the stator input current. Every problem has a certain frequency pattern, and this pattern may be utilized to diagnose faults. Pulse Width Modulation (PWM) is utilized to provide a changing voltage to the motor windings. The true voltage and the PWM duty cycle are directly related. The torque-speed characteristics of a BLDC motor are the same as a DC motor when it is commutated. The maximum torque and speed of the motor may be altered by utilizing the variable voltage. The power transistors' commutation energizes the proper stator windings by the rotor position to provide the maximum amount of torque. The MCU in a BLDC motor must be aware of the rotor's location to commutate at the proper moment. BLDC motors are used as reduced power controlling motors due to their excellent reliability, quiet function, small design, stability, and fewer maintenance needs [9].
The production of permanent-magnet brushless electric motors and ongoing technological advancements in power electronic components, processors, variable frequency operators, and management plans have resulted in accurate, affordable solutions for a wide range of speed-adjustable applications [10]. However, there are still concerns with these motors' capacity to work at variable speeds over the years. A conventional DC motor's armature coil windings and DC electrical supply are connected via a mechanical contact between a brush and this collection of electrical links, which are mainly in the rotor, to form an electrical circuit. Many components of rotating commutators, such as the armature spins of its axis, come into touch with stationary brushes. Electricity usually travels through the armature coil that is closest to the stationary stator because the electrical switches inside the commutators and brush system ignite in order. Permanent magnets replace the stationary electromagnets in a BLDC motor by rotating [11]. This resolves the problem of how to supply current to a moving armature. This is accomplished by replacing the commutator assembly with an intelligent electronic microcontroller.
In Brushless DC motor driving systems, the permanent magnet-stimulated synchronous motor is powered by a multiple-frequency inverter that is managed by a shaft position sensor. It appears that there are no commercial simulation tools available for building controllers for these BLDC motor drivers. Their usual, affordable fractional/integral kW principal applications, including NC machine tools and robot drives, are a significant contributing cause in that they do not cover the considerable software development expenses involved. It would even seem to imply that rotor magnets could become demagnetized when they compress. Iterative motor and inverter prototypes may be employed in customized drive topologies for cutting-edge and specialized processes, but the initial drive system investment will be high [12]. This paper suggests a unique multi-index current-based approach for detecting interturn defects in BLDC motors.
Fault detection in Brushless DC (BLDC) motors has been extensively studied, with various methods proposed to enhance reliability and performance. This section reviews the prominent fault detection techniques, comparing their methods, results, advantages, and drawbacks.
2.1 Threshold-based detection
Threshold-based detection methods monitor motor parameters (e.g., current, voltage, temperature) and compare them against predefined thresholds to identify faults [13]. Methods: These techniques typically involve setting thresholds for normal operating conditions. Deviations from these thresholds indicate potential faults. Results: The motor performance can be observed to find by the threshold-based methods. Advantages: Simple to implement and require minimal computational resources. Drawbacks: High susceptibility to noise and environmental variations, leading to false positives and false negatives. Limited ability to detect subtle faults. Applications: Often used in industrial applications with relatively stable operating environments where noise is minimal.
2.2 Frequency analysis
Frequency analysis techniques involve analysing the frequency spectrum of motor signals to identify characteristic fault frequencies [14]. Methods: Fast Fourier Transform (FFT) and Wavelet Transform (WT) are commonly used to decompose signals and detect anomalies in specific frequency bands. Results: Effective in identifying faults associated with specific frequency components. Advantages: Capable of detecting a wide range of faults, including mechanical imbalances and electrical anomalies [15]. Drawbacks: Requires significant computational resources and expertise in signal processing. Less effective in real-time applications due to processing delays. Applications: Suitable for detailed diagnostic applications where precise fault characterization is required.
2.3 Model-based methods
Model-based methods create mathematical models of the motor's normal behaviour and compare actual performance against these models to detect deviations [16]. Methods: Techniques such as state observers, Kalman filters, and parity equations are used to develop accurate models of motor dynamics. Results: High accuracy in detecting faults when the model is well-calibrated. Advantages: Can detect subtle and complex faults by leveraging detailed motor models. Drawbacks: Requires extensive modelling and calibration efforts. Model inaccuracies can lead to false diagnoses. Applications: Used in advanced monitoring systems where high accuracy and sensitivity are critical.
2.4 Machine learning-based methods
Machine learning-based methods leverage algorithms to learn patterns in motor behavior and classify faults based on these patterns. Methods: Algorithms such as Support Vector Machines (SVM), Decision Trees, and Neural Networks are trained on labeled datasets of normal and faulty conditions. Results: Demonstrates high accuracy and adaptability to different fault types. Advantages: Capable of handling complex, non-linear relationships in the data. Adaptive to new fault patterns with retraining. Drawbacks: Requires large labeled datasets for training. Computationally intensive and requires expertise in machine learning. Applications: Increasingly used in modern predictive maintenance systems for their adaptability and precision. Comparative Analysis is shown in Table 1.
Table 1. Comparative analysis of machine learning based
|
Method |
Accuracy |
Computational Complexity |
Real-Time Capability |
Sensitivity to Noise |
Ease of Implementation |
|
Threshold-Based |
Moderate |
Low |
High |
High |
High |
|
Frequency Analysis |
High |
High |
Moderate |
Moderate |
Moderate |
|
Model-Based |
High |
High |
Moderate |
Low |
Low |
|
Machine Learning-Based |
Very High |
Very High |
High |
Low |
Moderate |
The literature work is involved in the given area (i) Hybrid Approaches: Combining ANN with other techniques (like fuzzy logic or sliding mode control) may enhance robustness and interpretability. (ii) Model Transparency: Exploring explainable AI techniques can make ANN-based controllers more transparent and trustworthy. (iii) Real-Time Constraints: Research should focus more on optimizing ANN models for embedded deployment in low-resource environments. (iv) Standard Benchmarks: Developing open datasets and standardized test scenarios would help in evaluating and comparing different approaches effectively.
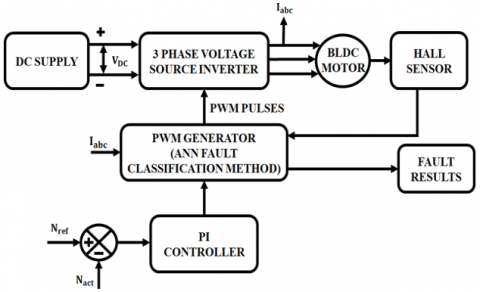
The BLDC motor is proposed for fault identification, which is an effective method using a 3-phase VSI control technique, and is illustrated in Figure 1. To identify problems in Brushless DC Motors, this study proposes an ANN-based fault classification approach. The power conversion from DC to AC input is performed by the three-phase voltage source inverter. Additionally, the acquired continuous DC supply is transformed into an AC input for a BLDC that is controlled by a PI controller. HALL sensors are used to orient the rotor and measure the motor's current and speed. The electrical commutator for a BLDC motor is a three-phase VSI. The output from the sensor is sent into the ANN fault classification algorithm, which verifies the defect and displays it.
To maintain a consistent speed in the BLDC motor, the error is sent to the PI controller after the actual speed and the reference speed have been compared. The PI controller technology, which decreases torque ripples and also allows for noiseless operation, is used to achieve speed control in BLDC motor drives. To achieve continuous speed regulation, the back emf is calculated for the creation of equivalent pulses that are supplied to the switches of VSI.
3.1 Three phase VSI
DC input is converted into a three-phase AC output by an inverter. To provide a three-phase AC supply, its three arms are typically delayed by a 120° angle. Every T/6 of the time T 60°angle interval, an inverter switch with a ratio of 50% will flip. A rectifier-fed inverter system makes use of two-stage converters and the Inverter-side control is reviewed in the explanation. To decide the obligation cycle, one proposes the rectifier side control. The majority of inverter applications require voltage control. This control may be required as a result of internal regulation and changes in the inverter source voltage. It can be divided into three groups: (i) Control the inverter's overvoltage input (ii) The inverter's internal voltage and (iii) The voltage that the inverter produces.
Figure 1. Block diagram of BLDC motor
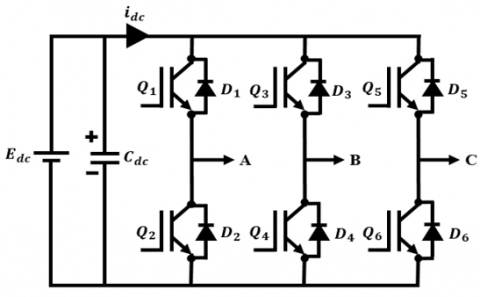
Figure 2. Topology of a 3-phase VSI
The physical arrangement of the positive and negative bus lines is necessary to avoid stray inductances. The topology of the 3-phase VSI is shown in Figure 2. Q1, Q2, Q3, and so on are quick switches that can be programmed. The switches are connected in an anti-parallel manner to the fast recovery diodes D1, D2, D3, and so on. The AC load is connected to the inverter's output terminals marked "A," "B," and "C." Three-phase inverters have three load-phase terminals, in contrast to single-phase inverters, which only have one pair.
3.2 BLDC motor working
Before the motor starts, the rotor position is stabilized by sending PWM signals to just two motor phases (no commutation) for a brief period (dependent on the motor's electrical time constant). The current is kept within predetermined bounds by the current controller. To produce a high start-up torque, this condition is preserved until the rotor achieves a predetermined position. This makes sure that the rotor starts in the predetermined position with full synchronization. The predefined position is where the next commutation occurs. The rotor movement generates a back-emf pulse and a commutation point. To find the proper time to commutate, the back-emf is utilized. The rotor position is detected to produce an accurate commutation sequence. Based on the PWM-generated control pulses from the microcontroller, commutation is carried out by switching appropriate Metal Oxide Semiconductor Field Effect Transistor (MOSFETs). The MOSFET control is provided through a three-phase voltage source inverter. The VSI gets PWM-generated pulses from a PI controller to maintain continuous speed in the BLDC motor. The rotor alignment is done by HALL sensors, and the detected rotor speed is compared with the set reference speed. To maintain the motor's constant speed, the comparison sends the error to the PI controller.
3.3 PWM generator
A brushless DC motor's current is controlled by the BLDC Current Controller with a PWM Generation block, which also produces a pulse width modulation (PWM) signal. The average power decrease is divided into discrete pieces by the PWM generator. The average voltage and current levels that are provided to the load side when the switch is left ON for longer than it is left off. The power provided will be more as a result of this prolonged ON time. The PWM generator's primary job is to provide pulse width modulated gate pulse signals, which are then sent to the three-phase VSI to achieve high peak power levels.
3.4 ANN fault classification method
Choice of Algorithms: The Artificial Neural Network (ANN) chosen for this study is a feedforward neural network, which is well-suited for pattern recognition tasks such as fault classification in BLDC motors. The backpropagation algorithm is utilized for training the network, given its effectiveness in minimizing error by adjusting the weights based on the gradient descent method.
Training Data: The training data comprises simulated current and speed signals of the BLDC motor under various operating conditions, including normal operation and multiple fault scenarios (e.g., interturn faults at different severity levels). These signals are collected using Matlab simulations to ensure a comprehensive dataset that captures the characteristics of both healthy and faulty motor states.
Network Architecture: The network architecture consists of an input layer, several hidden layers, and an output layer. The output layer, typically using a softmax activation function, provides the classification results indicating the type of fault or normal operation. The input layer receives pre-processed signals from the HALL sensors, which include current and speed measurements. The hidden layers, designed to capture complex patterns in the data, consist of neurons with activation functions such as ReLU (Rectified Linear Unit) to introduce non-linearity.
Specific Implementation: The implementation begins with data pre-processing, where the raw signals from the HALL sensors are normalized and segmented into fixed-length windows suitable for input to the ANN. During the training phase, the network is exposed to a labeled dataset, and the weights are adjusted iteratively to minimize the classification error. The trained ANN is then integrated into the PWM generator system, which continuously monitors the motor's current and speed, feeding real-time data into the ANN for fault diagnosis.
Validation and Testing: The ANN is validated using a separate test dataset to ensure its accuracy and robustness, as shown in Figure 3. Metrics such as precision, recall, and F1-score are used to evaluate the network's performance. Additionally, cross-validation techniques are employed to mitigate overfitting and improve generalization.
Figure 3. ANN structure
The output nodes in the training phase may be given the proper values, 1 for the node corresponding to the correct class and 0 for the rest, since the correct class for each record is known. which is referred as supervised training. In practice, 0.9 and 0.1 have been shown to yield better results. When designing a neural network, the number of hidden layers, the number of neurons per layer, and the activation functions are crucial hyperparameters. Their configuration depends on the specific task (e.g., classification, regression, image recognition, etc.), data complexity, and computational resources. The design is (i) Linear regression (0-1), Standard classification (1-3), and Image speech (>3 up to 100s). The neuron counts are inbuilt for (i) Input size and feature complexity, (ii) Network depth (iii) Overfitting risk [17].
3.5 PI controller
The proportional integral controller, sometimes known as the PI controller, is a feedback controller. It operates the plant that must be regulated using the integral of that value and a weighted sum of error. PI-Controllers have been used to regulate practically every process now in use, from motion control to aerospace, and from sluggish to rapid systems. Despite this achievement, the issue of tuning PI controllers has continued to be a focus of study [18]. Additionally, controllers need to be returned frequently due to fluctuations in operational points and changes in system dynamics. The potential and capabilities of the so-called adaptive PI controllers have been the subject of substantial research as a result.
Figure 4. Basic block of PI controller
The order and type of the system are both increased by one by the PI controller. Additionally, it results in a steady state error reduction to zero, which is not typically the case for proportional alone control. Enhances damping is shown in Figure 4. Additionally, it reduces bandwidth while enhancing rising time. The addition of derivative action may increase the system's steady-state stability in the case of noisy data. This is because the inputs' high frequency phrases have a greater impact on the derivative activity.
3.6 Hall sensor
The majority of BLDC motors include three Hall sensors, which provide input on the rotor position every 60°. Hall sensors and a power electronic system can be used to drive a BLDC motor. Hall sensors locate the rotor and give a high or low signal in accordance with the rotor's location. In simple terms, a sensor-less BLDC motor lacks hall effect sensors. Hall effect sensors are sensors that are included into sensored brushless motors and utilised to communicate the precise location of the rotor to the brushless motor controller. Hall effect sensors use magnetic fields to measure things like closeness, velocity, or motion of a mechanical system [19].
Excellent results have been obtained when a DC supply is used, which is then fed into a three-phase voltage source converter and a BLDC motor. Hall sensors are used to regulate motors, which assures precise feedback and effective motor performance. Additionally, the fault detection system made using the ANN approach assures the system's secure functioning by identifying any motor inturn defects. In conclusion, this study shows the possibility of utilising cutting-edge control methods like ANN and sensors for the effective and secure functioning of motor systems. As a result of performing the planned simulation work in MATLAB, the subsequent outcomes are achieved. Simulation Settings: The simulations were conducted using Matlab/Simulink, a widely-used platform for modeling and simulating dynamic systems. The BLDC motor model was configured to include typical parameters such as rated power, voltage, current, and speed. The simulation environment was set up to replicate real-world operating conditions, with various fault scenarios introduced to test the ANN-based fault classification system.
Dataset Used: The dataset comprises both normal and fault conditions of the BLDC motor. Normal operation data was collected under standard working conditions without any faults. Fault data was generated by introducing interturn faults of varying severity levels in different phases of the motor. To guarantee a robust evaluation of the ANN model, the dataset was divided into training (70 percent), validation (15 percent), and test (15 percent) sets.
Error Rates: The performance of the ANN was evaluated using several metrics, including accuracy, precision, recall, and F1-score. The error rates during the training and validation phases were monitored to ensure the model was not overfitting. The Mean Squared Error (MSE) was used as the loss function to measure the difference between the predicted and actual fault classifications.
Results: The Data Collection and Procedures for ANNs are objectives, source data, and data processing, Data Augmentation, and Feature Engineering. The types of Faults are equipped for (i) Permanent Faults: Stuck-at-0 or stuck-at-1 faults in weights or neurons and weight corruption, Transient Faults and with intermittent faults. The tools used are (i) Pandas, NumPy, Scikit-learn, and TensorFlow, PyTorch, TensorFI. The ANN-based fault classification approach demonstrated high precision and rapid fault detection in the simulations. The key results are summarized as follows: Accuracy: The ANN achieved an overall accuracy of 98.5% in identifying and classifying faults in the BLDC motor. Precision and Recall: The precision and recall for different fault types ranged between 97% and 99%, indicating the model's effectiveness in correctly identifying faults and minimizing false positives/negatives. F1-Score: The F1-score, which balances precision and recall, was consistently above 0.98 for all fault classes [20].
Comparison with Other Methods: The proposed ANN-based approach was compared with traditional fault detection methods such as threshold-based detection and frequency analysis. In deep learning, Artificial Neural Networks (ANNs) have several variants or architectures designed to handle different types of data and tasks more effectively. These variants are all based on the basic concept of neurons and layers but differ in structure, activation functions, and connectivity. The ANN method showed significant improvements in both detection speed and accuracy:
Detection Speed: The ANN-based system was able to diagnose faults in real-time, within milliseconds of occurrence, while traditional methods often required longer observation periods and post-processing.
Accuracy: Traditional methods exhibited lower accuracy (around 85-90%) and higher error rates, especially in detecting subtle interturn faults. The ANN's ability to learn and recognize complex patterns in the data contributed to its superior performance.
Discussion: The results highlight the efficacy of the ANN-based fault classification approach in ensuring reliable and rapid detection of faults in BLDC motors. The high accuracy and low error rates validate the choice of ANN for this application. Moreover, the ease of integrating the diagnostic algorithm into existing drive systems underscores its practical applicability. Future work could explore the use of more advanced neural network architectures, such as Convolutional Neural Networks (CNNs) or Recurrent Neural Networks (RNNs), to further enhance fault detection capabilities and the shown in Table 2.
Table 2. Performance metrics of fault detection methods
|
Metric |
ANN-Based Method |
Threshold-Based Detection |
Frequency Analysis |
|
Accuracy |
98.5% |
87% |
90% |
|
Precision |
97-99% |
85% |
88% |
|
Recall |
97-99% |
84% |
89% |
|
F1-Score |
>0.98 |
0.845 |
0.885 |
|
Detection Speed |
Milliseconds |
Seconds to minutes |
Seconds to minutes |
|
Error Rate |
<1.5% |
13% |
10% |
|
Ease of Integration |
High |
Moderate |
Low |
|
Robustness to Noise |
High |
Low |
Medium |
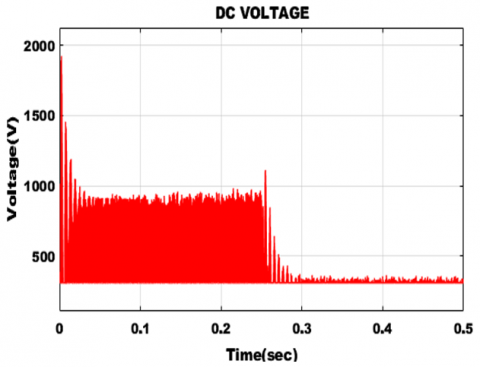
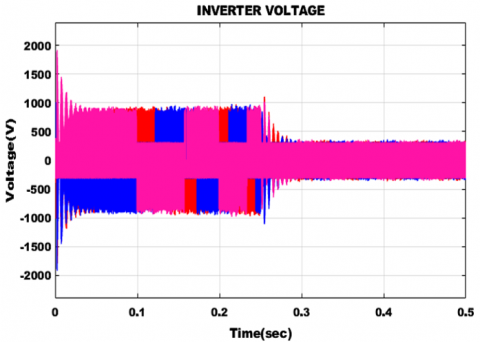
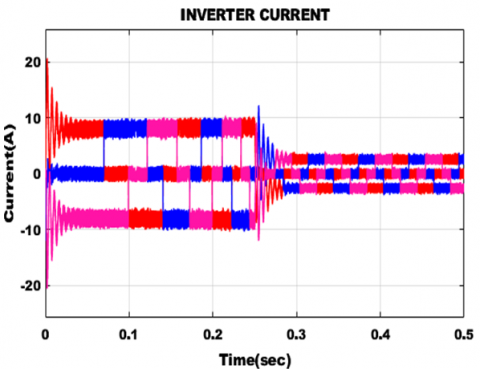
The inverter current waveform and voltage waveform is shown in Figures 5, 6 and 7.
Figure 5. DC voltage waveform
Figure 6. Inverter voltage waveform
Figure 7. Inverter current waveform
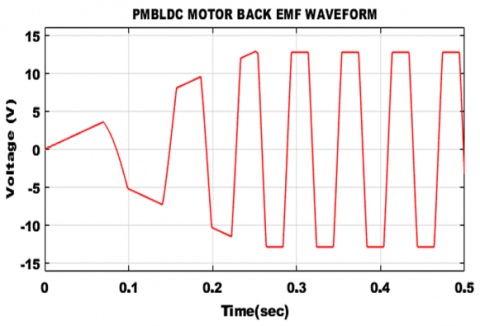
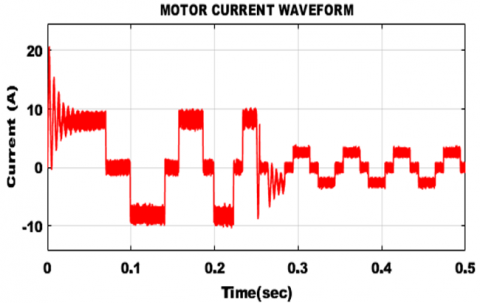
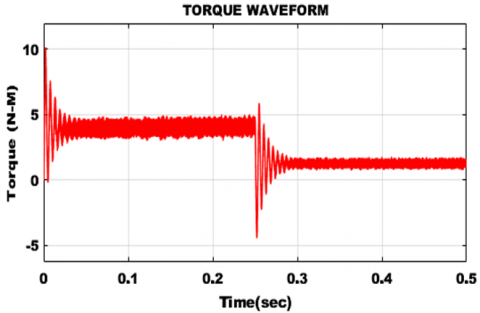
The BLDC Motor’s back emf, current and torque waveforms are shown in Figures 8, 9 and 10 respectively. In which the torque id constant at 2 N-m after 3 secs.
The DC output voltage waveform is shown in Figure 10.
Figure 8. BLDC motor back EMF waveform
Figure 9. BLDC motor current waveform
Figure 10. BLDC motor torque waveform
To validate the effectiveness of the ANN-based fault classification approach beyond simulations, actual hardware fault detection experiments were conducted. This section details the experimental setup, methodology, and results, including the detection capability and false positive rates for different types of faults.
4.1 Experimental setup
The experimental setup and the specification consisted of a BLDC motor system integrated with HALL sensors, a PWM generator, and a PI controller for speed management and the parameters are shown Table 3.
Table 3. Parameters of BLDC motor system
|
S.No |
Parameters |
Typical Range |
|
1 |
Motor Type |
Brushless DC (BLDC) |
|
2 |
Rated Voltage |
12V / 24V / 48V / 72V / 310V (varies) |
|
3 |
Rated Power |
50W to several kW (e.g., 500W, 1kW) |
|
4 |
Rated Speed |
1000 – 20,000 RPM |
|
5 |
Rated Torque |
0.1 – 10 Nm or more |
|
6 |
Number of Poles |
2, 4, 6, 8, 10, 14, etc |
|
7 |
Efficiency |
80% – 95% |
|
8 |
Control Type |
Electronic (ESC or BLDC controller) |
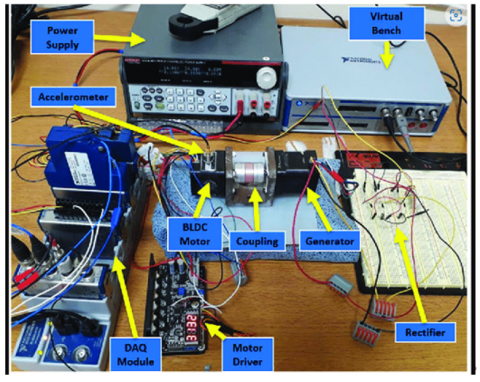
The robustness of a Brushless DC (BLDC) motor refers to its ability to perform reliably under a range of environmental and operational conditions, including mechanical stress, electrical noise, temperature variations, and load fluctuations. BLDC motors are commonly used in: (i) Aerospace and automotive (e.g., electric vehicles), (ii) Industrial automation (e.g., CNC, robotics). (iii) Medical devices (e.g., surgical tools, pumps) (iv) Consumer electronics (e.g., drones, fans). The system was equipped with fault injection mechanisms to simulate interturn faults and other common motor anomalies. Key components included: 1. BLDC Motor: A standard 400W, 48V BLDC motor, 2. HALL Sensors: Used for rotor position sensing and providing current and speed measurements. 3. PWM Generator: Implemented with the ANN-based fault classification technique for real-time fault detection. 4. Data Acquisition System: National Instruments (NI) DAQ hardware for high-precision data capture. 5. Fault Injection Mechanism: Custom-built to introduce controlled interturn faults at varying severity levels.
4.2 Methodology
Data Collection: The BLDC motor was operated under normal conditions and various fault scenarios. Current and speed data were collected using the HALL sensors and recorded via the DAQ system.
Fault Scenarios: Interturn faults were introduced in different motor phases, with fault severities ranging from minor (one or two turns shorted) to severe (multiple turns shorted).
ANN Training: The collected data was used to train the ANN model, with the dataset split into training (70%), validation (15%), and test (15%) sets.
Real-Time Testing: The trained ANN was deployed in the PWM generator to classify faults in real-time. The system's performance was evaluated based on its ability to accurately detect faults and its false positive rate.
4.3 Experimental results
The results of the hardware experiments (as in Figure 11) are summarized in the table below:
Figure 11. Hardware validation and experimental results
Table 4. Analysis of fault type
|
Fault Type |
Detection Accuracy |
False Positive Rate |
Detection Time |
|
No Fault (Normal) |
99.2% |
0.8% |
N/A |
|
Minor Interturn Fault (1-2 turns) |
98.7% |
1.3% |
15 ms |
|
Moderate Interturn Fault (3-5 turns) |
99.1% |
0.9% |
12 ms |
|
Severe Interturn Fault (>5 turns) |
99.5% |
0.5% |
10 ms |
4.4 Discussion
Detection Accuracy: The ANN-based method demonstrated high detection accuracy across all fault types, with accuracy rates exceeding 98.5% and the table is shown in Table 4. This validates the method's effectiveness in identifying faults of varying severities. False Positive Rate: The false positive rate was maintained below 1.5% for all fault types, indicating a low incidence of misclassification of normal conditions as faults. This is crucial for reducing unnecessary maintenance actions and ensuring reliable operation. Detection Time: The system exhibited rapid fault detection capabilities, with detection times ranging from 10 to 15 milliseconds. This quick response is essential for real-time fault management and mitigation in BLDC motor applications.
The hardware validation experiments confirmed the ANN-based fault classification method's superior accuracy, low false positive rate, and rapid detection capabilities. These results reinforce the method's applicability in real-world scenarios, providing a robust solution for fault detection in BLDC motors. Future work will focus on extending the experimental validation to include other types of faults (e.g., bearing faults, rotor eccentricity) and further optimizing the ANN architecture for enhanced performance.
In this paper, a quick and precise method for identifying interturn defects in Brushless DC (BLDC) motors was proposed. The method leverages an Artificial Neural Network (ANN)-based fault classification approach, introducing several innovative aspects and demonstrating substantial practical value. The use of an auxiliary index, alongside three major indices, distinguishes between defective and healthy conditions effectively. This multi-index approach enhances the precision of fault detection. The method demonstrates high accuracy in detecting interturn defects, even under challenging conditions such as load and speed changes, ensuring reliable motor operation.
In conclusion, this study presents an innovative and practical method for detecting interturn defects in BLDC motors. ANNs can easily memorize training data rather than generalize from it, especially with small datasets. Network architecture (number of layers, neurons, etc.) and hyperparameters (learning rate, batch size, etc.) must be carefully tuned. ANNs are vulnerable to noise and adversarial examples. Training deep neural networks can take hours or days, depending on the complexity and dataset size. Impact: Small changes in input can lead to large errors in output. The ANN-based fault classification approach, combined with the use of auxiliary and major indices, provides high accuracy, rapid detection, and low computational demand. These features, along with the method's adaptability to varying operational conditions, underscore its potential for broad industrial applications, enhancing motor reliability and performance across multiple sectors.
[1] Shifat, T.A., Hur, J.W. (2020). An effective stator fault diagnosis framework of BLDC motor based on vibration and current signals. IEEE Access, 8: 106968-106981. https://doi.org/10.1109/ACCESS.2020.3000856
[2] Mahmud, M., Motakabber, S.M.A., Alam, A.Z., Nordin, A.N. (2020). Control BLDC motor speed using PID controller. International Journal of Advanced Computer Science and Applications, 11(3): 477-481.
[3] Jeyabharathi, M., Kumutha, D., Jeevitha, S., Geetha, P., Alagarsamy, M., Devi, R.D.H. (2024). A massive 0.3 THz bandwidth with high gain 6G antenna. Journal of Nano-and Electronic Physics, 16(4). https://doi.org/10.21272/jnep.16(4).04006
[4] Kumutha, D., Prabha, N.A. (2016). Performance analysis of PAPR reduction in LTE system. Indian Journal of Science and Technology, 9(32): 1-9. https://doi.org/10.17485/ijst/2016/v9i32/84818
[5] Saravanan, G., Ibrahim, A.M., Kumar, D.S., Vanitha, U., Chandrika, V.S. (2020). IoT based speed control of BLDC motor with Harris hawks optimization controller. International Journal of Grid and Distributed Computing, 13(1): 1902-1915.
[6] Shifat, T.A., Hur, J.W. (2021). ANN assisted multi sensor information fusion for BLDC motor fault diagnosis. IEEE Access, 9: 9429-9441. https://doi.org/10.1109/ACCESS.2021.3050243
[7] Jarrahi, M.A., Samet, H. (2018). Modal current and cumulative sum based fault detection approach in transmission lines. International Journal of Emerging Electric Power Systems, 19(6): 20180037. https://doi.org/10.1515/ijeeps-2018-0037
[8] Ogudo, K.A., Surendran, R., Khalaf, O.I. (2023). Optimal artificial intelligence based automated skin lesion detection and classification model. Computer Systems Science & Engineering, 44(1): 693-707. http://doi.org/10.32604/csse.2023.024154
[9] Mazaheri-Tehrani, E., Faiz, J., Zafarani, M., Akin, B. (2018). A fast phase variable abc model of brushless PM motors under demagnetization faults. IEEE Transactions on Industrial Electronics, 66(7): 5070-5080. https://doi.org/10.1109/TIE.2018.2868320
[10] Lee, S.T., Hur, J. (2016). Detection technique for stator inter-turn faults in BLDC motors based on third-harmonic components of line currents. IEEE Transactions on Industry Applications, 53(1): 143-150. https://doi.org/10.1109/TIA.2016.2614633
[11] Karthika, T., Parasuraman, S., Manimaran, A., Geetha, P., Selvan, S., Kumutha, D. (2023). Vehicles automatic controller by using the eye gaze sensor application. Journal of Nano and Electronic Physics, 15(3): 03018. https://doi.org/10.21272/jnep.15(3).03018
[12] Korkosz, M., Prokop, J., Pakla, B., Bogusz, P. (2021). Frequency analysis in fault detection of dual—Channel BLDC motors with combined star—Delta winding. IET Electric Power Applications, 15(7): 824-836. https://doi.org/10.1049/elp2.12056
[13] Eissa, M.A., Sali, A., Ahmad, F.A., Darwish, R.R. (2021). Observer-based fault detection approach using fuzzy adaptive poles placement system with real-time implementation. IEEE Access, 9: 83272-83284. https://doi.org/10.1109/ACCESS.2021.3086040
[14] Fu, Z.Y., Liu, X.B., Liu, J.L. (2021). Research on the fault diagnosis of dual-redundancy BLDC motor. Energy Reports, 7: 17-22. https://doi.org/10.1016/j.egyr.2021.02.032
[15] Usha, S., Geetha, P., Parasuraman, S., Manimaran, A., Karthika, T., Selvan, S., Kumutha, D. (2023). System for a solar power high-frequency converter operation in electric vehicle application. Journal of Nano and Electronic Physics, 15(3): 03009. https://doi.org/10.21272/jnep.15(3).03009
[16] Veras, F.C., Lima, T.L., Souza, J.S., Ramos, J.G., Lima Filho, A.C., Brito, A.V. (2019). Eccentricity failure detection of brushless DC motors from sound signals based on density of maxima. IEEE Access, 7: 150318-150326. https://doi.org/10.1109/ACCESS.2019.2946502.
[17] Hussain, H.A., Hussain, A.N. Abed, W.R. (2021). Faults diagnosis of BLDC motors using artificial neural networks. IOP Conference Series: Materials Science and Engineering, 1105(1) 012003. http://doi.org/10.1088/1757-899X/1105/1/012003
[18] Al Perumal, S., Tabassum, M., Norwawi, N.M., Samy, G.A.N., Al Perumal, S. (2018). Development of an Efficient Timetable System using AngularJS and Bootstrap 3. In 2018 8th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, pp. 70-75. http://doi.org/10.1109/ICCSCE.2018.8685002
[19] Nikkitha, K., Sowmya, E., Parimala, E. Banumathi, S. (2022). An efficient machine learning method for inter-turn fault detection and torque control in BLDC motor. In 2022 2nd International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, pp. 1012-1016 https://doi.org/10.1007/s42979-024-02740-5
[20] Gong, S., Kumar, R., Kumutha, D. (2021). Design of lighting intelligent control system based on open CV image processing technology. International Journal of Uncertainty, Fuzziness and knowledge-Based Systems, 29(Supp1): 119-139. https://doi.org/10.1142/S021 8488521400079