N. Sudhakar Yadav![]() | Rajanikanth Aluvalu*
| Rajanikanth Aluvalu*![]() | Uma Maheswari Viswanadhula
| Uma Maheswari Viswanadhula![]() | MVV Prasad Kantipudi
| MVV Prasad Kantipudi![]() | Pradeep Kumar Nagalapura Shankar Murthy
| Pradeep Kumar Nagalapura Shankar Murthy![]() | Suresh Salendra
| Suresh Salendra![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Quantum Machine Learning (QML) is a new direction within the investigation of present-day technologies that the developing need for accuracy in automated approaches has spurred. QML is changing the realm in optoelectronic robotic structures, according to this research. The present research objectives are to meet the growing demand for accuracy in dynamic optoelectronic environments across many industries by using quantum ideas to enhance choice-making precision. Some obstacles are specific to merging quantum computing with system learning, such as the complexity of algorithms and the constraints of quantum hardware. Adaptive Quantum Entanglement for Decision Fusion (AQE-DF) is a high-quality method that utilises adaptive quantum entanglement to facilitate effective choice fusion in optoelectronic robot systems. It is supplied on this paper as a groundbreaking method. Intending to enhance the robotic device's accuracy and flexibility, AQE-DF dynamically entangles quantum states linked to several preference routes. This lets in for the simultaneous assessment and integration of numerous preference possibilities. Multiple optoelectronic robot duties can be executed with AQE-DF, including complex manipulation, self-sufficient navigation, and real-time image processing. As this idea demonstrates, AQE-DF can convert the accuracy and flexibility of optoelectronic robotic structures by optimizing the desired fusion in those specific applications. A wonderful simulation study is completed to assess the practicability and efficiency of AQE-DF in numerous optoelectronic programs. It then shows convincing consequences, displaying that AQE-DF effectively improves choice-making precision, adaptability, and performance.
quantum, leap, automation, machine learning, precision optoelectronics, robotic systems, adaptive, decision fusion
Optoelectronic robotic structures incorporating Quantum Machine Learning (QML) have greatly advanced the search for more eco-friendly and personalized automated procedures [1]. This innovative procedure, however, isn't without its fair share of difficult challenges [2]. Although quantum computing could completely transform the way files are processed, it is currently experiencing difficulties with accuracy due to issues with balancing and error correction [3]. Quantum bits are so sensitive that they necessitate elaborate error correction methods to shield them from outside noise and interference [4]. This intrinsic fragility makes maintaining the coherence necessary for continuous and accurate quantum computing extremely difficult, especially in real-world applications like optoelectronic robots [5]. Quantum algorithm development is labor-intensive, especially when targeting optoelectronic structures for device skillability [6]. Adapting and improving classical system mastery techniques for quantum computing systems requires interdisciplinary knowledge in both tool learning and quantum physics [7]. To attain the precision desired for optoelectronic robots, experts devote much energy to developing novel quantum algorithms that use the peculiarities of quantum computer systems [8]. Another obstacle is the lack of accessible and scalable quantum hardware. There is still a long way to go before we can create big-scale, fault-tolerant quantum processors, even if quantum computing has made great strides [9]. The lack of readily available quantum hardware makes implementing quantum algorithms in optoelectronic robotic systems difficult, making quantum-advanced solutions impractical and limiting scalability [10].
The transition from classical to quantum paradigms necessitates a paradigm change in expertise [11]. Experts in optoelectronic robots should familiarize themselves with quantum information technology to effectively utilize quantum computing [12]. The educational and pedagogical barriers presented by this transdisciplinary need prevent the implementation of quantum solutions at the automation site [13]. One of the many promising applications of quantum device learning is the control of optoelectronic robotic systems with unprecedented granularity, optimizing strategies at exponentially faster rates, and enhancing complex quantum states' recognition [14]. Researchers are currently addressing the modern challenges of scalability in hardware, the construction of sets of rules, and quantum error correction. Optoelectronic robotics' potential for efficiency and accuracy could be transformed by combining quantum computing and automation [15].
Various approaches within the ever-changing field of Quantum Leap in Automation investigate Quantum Machine QML, intending to improve the precision of optoelectronic robotic systems [16]. One approach uses quantum devices with more conventional machine learning (ML) techniques. Using entanglement and parallelism, two characteristics of quantum computing, this method aims to use quantum computing for specific tasks by translating classical information into quantum states. Quantum hardware optimization, however, has its unique challenges. Environmental noise and coherence can affect quantum states, reducing their sensitivity and hence the accuracy of the effects. All the other areas of expertise are devoted to developing new quantum algorithms specifically designed to solve problems in machine learning. Along with QSVM and QNN, quantum algorithms aim to outperform classical algorithms by leveraging quantum disruption and parallelism. However, its adaptability to real-world optoelectronic robot packages and scalability pose challenges. Nevertheless, problems such as efficiently encoding and processing complicated data on quantum computing systems remain significant obstacles.
An essential aspect of quantum computing is quantum error correction techniques, which are used when optoelectronic robotic precision is required. Surface code and concatenated codes are two methods that are currently being considered as ways to lessen the effect of errors on quantum computing. The cost of computing goes up, and the quantum advantage goes down when certain error-correcting methods are executed. The search for simple quantum calculations encounters a formidable obstacle in finding an appropriate balance between processing speed and error correction. Quantum device research presents a huge challenge to optoelectronic robot setups because of the lack of readily available and scalable quantum technology. In response, researchers are devoting a tremendous deal of time and energy to developing quantum processors, which are both more powerful and more tolerant of errors. However, no easy task is associated with solid quantum production on a massive scale. Quantum leap automation methods show potential for enhancing optoelectronic robotic systems' accuracy by capitalizing on quantum advantages; yet, there are still obstacles to overcome.
Full use of QML's revolutionary power in automation will require resolving issues related to error correction, algorithm optimization, and hardware scale. A never-ending stream of interdisciplinary work in quantum information science, system mastering, and engineering is required to overcome these obstacles and fully understand the potential of quantum-more capable automation.
The remaining portion of the study is structured identically to the literature review conducted in Section 2, which examined previous attempts to ascertain the Exploring QML for Enhanced Precision in Optoelectronic Robotic Systems. Section 3 details the approach and its mathematical foundation, AQE-DF. The fourth section presents the findings and debate, while Section 5 offers a summary and concluding comments.
Several scientific domains, such as nanoscience, optoelectronic materials, quantum machine research, and chemical synthesis, have recently confirmed a paradigm shift driven by new approaches. Implementing state-of-the-art technology such as machine learning (ML) and artificial intelligence (AI), these methods uncover novel resource discovery and synthesis approaches. These solutions have tremendous potential for the future of both industries, and they were developed using revolutionary methodologies that integrate AI with medical research.
An exhaustive review of key methods in the ever-evolving field of quantum device learning is the basis of the method suggested by Melnikov et al. [17]. This category includes discussions of quantum-better algorithms, HQ-CNNs (hybrid quantum-classical neural networks), quantum gain studies, quantum-better hardware, and quantum devices for reducing noise and errors. Focusing on practical engineering solutions that have moved from transforming physics standards into quantum software programmes, the outputs aim to showcase advancements in quantum technology and artificial intelligence.
To locate metal halide perovskite single crystals by inverse temperature crystallization (ITC), the solution proposed by Li et al. [18] employs an automated high-throughput method (H-TA). Using 45 organic ammonium cations, 8172 synthesis procedures were carried out, resulting in the development of two novel phases and a fivefold increase in accessible compounds. Metal halide perovskite crystallization research can be accelerated and improved with this dataset, which allows statistical analysis and the creation of machine learning models to forecast crystal formation conditions.
By making photovoltaic (PV) devices that use less energy and LEDs and sensors that use less energy, the new optoelectronic materials developed by Mayr et al. [19] could completely change the current green transition. Both organic semiconductors and, more lately, perovskites have emerged as promising materials for such uses. This Perspective shows how new ML methods can aid in studying these materials, from facilitating experimental guidance to expediting ab initio calculations. Generative methods, physically informed neural networks, and system-discovered molecular dynamics potentials are included, all built on top of previous research.
Implemented by Li et al. [20] using their recommended methodology, the Materials Acceleration Operation System (MAOS) uses a one-of-a-kind language and compiler architecture. As a result of its incorporation with virtual reality, collaborative robotics, and reinforcement learning, MAOS enables autonomous materials synthesis and high assurance. Autonomy and less human intervention are hallmarks of MAOS's digital fact training. Improving the nucleation principle and finding the best chemical synthesis technique hints at how AI can revolutionize materials technology.
Nanoscience uses ML's new capabilities to scour enormous databases and expedite discovering novel materials, as stated by Brown et al. [21]. Device learning (ML) evaluation of nanoscience datasets, ML-guided material discovery via active learning, and the nanoscience of memristive devices for ML hardware are the three interconnections explored in this Mini Review. Nanoscience and machine learning scientists discuss future collaboration's potential benefits and challenges.
QML approaches, now used in robotics, show promise for improving computing efficiency and decision-making accuracy; yet, they have several serious limitations. Hardware limitations mean that most existing QML methods use shallow quantum circuits, severely limiting their ability to accurately describe complicated, high-dimensional robotic settings. Furthermore, many of these approaches work with the assumption that quantum computers are perfect and noise-free, but they don't consider that NISQ devices suffer from decoherence and gate faults, which severely damage performance and restrict scaling. Reliability in real-world robotic jobs demanding continuous, real-time reactions is further reduced due to the absence of strong error correction included inside these frameworks. Furthermore, the difficulties of latency and the cost of quantum-classical data interchange, inherent in integrating quantum algorithms with conventional robotic control systems, are often disregarded in the current writings. Given this disparity, it is clear that hybrid designs that combine quantum advantage with practical implementation are required. Thus, models such as AQE-DF are necessary because, while QML improves theoretical performance, their practical use in robotics is limited due to software constraints, susceptibility to noise, and integration complexity. Combined, these studies show how AI and ML are revolutionizing many fields. The results of this evaluation show that AQE-DF is adaptable to new methods.
When it involves optoelectronic robotic systems searching for more precise automated processes, QML has been a game-changer. Quantum principles are employed in the advanced AQE-DF technique, designed to revolutionize decision-making precision. The paper addresses the inventive method that was taken. Optimized quantum error correction, known as AQE-DF, is a technique that enhances the precision and adaptability of optoelectronic robotic systems. It accomplishes it by dynamically encapsulating quantum states combined with various decision paths. This technique provides a way for several applications for complicated employment.
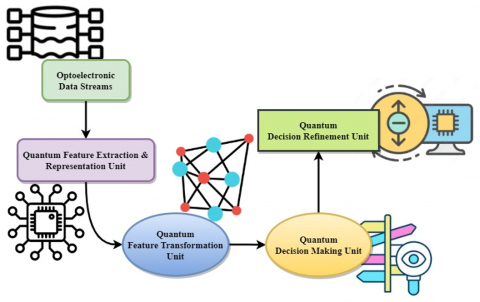
Figure 1. Data processing system for quantum-enhanced optoelectronics
Figure 1 shows a streamlined schematic of the most powerful computational system for optoelectronics, which has been enhanced with quantum technology. This system has been upgraded to include quantum computing. The purpose of this system is to make use of quantum computing for the processing of complicated data, particularly for tasks that involve optoelectronic data streams. The first issue to be accomplished is using the Optoelectronic Data Stream module internally to herald uncooked information generated by Optoelectronic sources. There is the possibility that this could consist of data from sensors, cameras, or optoelectronic gadgets. The number one reason is to get the statistics ready for quantum processing, which is the first step in the technique. The next step of this procedure is the Quantum Extraction of Features and Representation Unit. The notions of quantum computing are utilized in this unit, aiming to extract effective features from the optoelectronic information. The utilization of quantum extracting of capabilities methods allows the introduction of an extra thorough illustration of complex and high-dimensional facts, which are useful for subsequent analysis. The records processed until fully extracted into capabilities are transmitted to the Quantum Feature Conversion Unit. This particular instance involves the software of quantum strategies to alter the function representation. The motive of this stage is to enhance the discriminative ability of the tendencies so that they can be utilized more efficaciously within the subsequent degrees of selection-making. A crucial component of the device is known as the Quantum Decision-Taking Unit. Utilizing the modified traits, this module employs quantum computing to arrive at complicated decisions. When making judgments, there are certain instances wherein quantum algorithms may be more powerful than traditional techniques. This is proper when the facts in the query have difficult connections. The system's decision-making manner is also advanced by incorporating a quantum Decision Improvement Unit. This issue must ensure that the quantum machine adheres to fixed policies whilst making selections, ultimately leading to more precise and trustworthy consequences. The device paintings' components collectively decorate how facts are represented and how the decision-making system is carried out. This is carried out by utilizing abilities that can be boosted through quantum mechanics. This is carried out through the use of a cascading effect.
The design illustrates the integration of quantum computing with traditional optoelectronic data processing, exhibiting how the tasks associated with information processing could lead to great gains. Figure 1 depicts a comprehensive system for processing optoelectronic data containing quantum computing. The potential confluence of these two fields of research is demonstrated by the fact that this system contains components such as feature extraction, transformation, decision-making, and refining.
$Q=\frac{\beta .(\gamma+\delta)}{\alpha(\epsilon-\emptyset) .(\vartheta+L)} \times\left(1+\frac{\lambda . \mu}{\omega^2}\right) \times\left(1-\frac{\varepsilon . \eta}{v}\right) \times\left(1+\frac{\rho . \sigma}{\tau^2}\right)$ (1)
The gadget's ability to analyze and combine many options simultaneously is proven with integration ($\delta$), even as concurrent evaluation ($\gamma$) through quantum entanglement allows for the contemporaneous examination of more than one decision opportunity. The complexities of optoelectronic environments ($\varnothing$), hardware regulations ($\epsilon$), and quantum algorithms ($\alpha$) are all taken into account via the Eq. (1). Additional aspects that impact selection-making include quantum coherence ($\vartheta$), real-time processing effectiveness ( L ), and variables consisting of quantum uncertainty ($\omega$) and ambient noise ($\varepsilon$). Parameters like quantum decoherence ($\rho$), correction of mistakes efficiency ($\sigma$), and simultaneous processing velocity ($\tau$) are included in Eq. (1), which already includes the homes of quantum entropy ($\lambda$), computing value $(\eta)$, and concurrency (v). When taken as an entire, those elements illustrate the complex dynamics inside the cautious optoelectronic robot structures' selection-making accuracy.
$B(u)=\beta .\left(\frac{\sum_{j=1}^O f^{-\gamma . u} . R_j}{\int_0^u f^{\delta . \tau} {tani}(\eta . E(\tau)) d \tau}\right)^\alpha .\left(1-\frac{\sigma . f^{-\vartheta . u}}{\rho . u+1}\right)$ (2)
The Eq. (2) describes the optoelectronic robotic system's adaptability over the years; every variable is big. At a positive point in time $(u), B(u)$ shows how adaptable something is. It is tormented by the strength of the quantum entanglement $(\beta)$ and the exponential decay of the quantum state over time $(\gamma)$. It is additionally impacted by the rapid development of the decision-making process ($\delta$), a non-linear exponent ($\alpha$), the quantity of quantum states (O), and specific quantum states ($\mathrm{R}_{\mathrm{j}}$), and a hyperbolic tangent function that affects decisionmaking tani $(\eta . \mathrm{E}(\tau) \mathrm{d} \tau)$. The interplay among quantum principles, cognitive fusion, and time-dependent aspects is illustrated by $\sigma, \vartheta$, and $\rho$, which provide an exhaustive overview of the flexibility in optoelectronic systems for robotics.
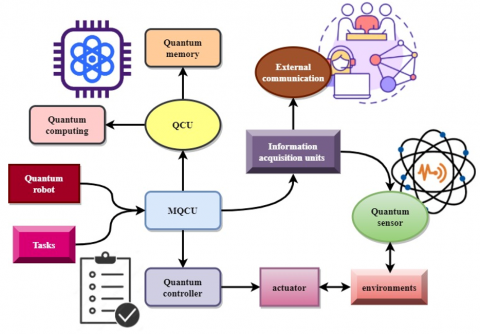
Benioff's 1998 concept states that a quantum robot is a portable quantum system with a quantum computer and other necessary auxiliary equipment. Even though the robot represented there does not possess environmental awareness, decision-making capabilities, or measuring capabilities, he emphasized the significance of quantum computers in the context of quantum robots. An alternative method of addressing quantum robots is presented in the paper. This method takes into account the quantum robots' ability to communicate with the environment through the use of sensing and data processors. A mobile physical object known as a quantum robot is developed using the quantum impacts of quantum systems. This device can recognize its surroundings and state of existence, process quantum data, and carry out significant tasks. Multiquanta computing units (MQCUs), information acquisition units, and quantum controllers and actuators are the three components that make up a quantum robot system. These components are all coupled with one another. Figure 2 depicts the system and its components in exceptional detail.
Figure 2. The architecture of a quantum robotic system
A quantum robot's information processing center, often known as the brain, has been referred to as the main processing unit (MPU). It can transmit data to its surroundings and perform duties in quantum languages. This may be performed via quantum sensors or outside communications. The brain can execute suitable quantum control algorithms and generate the required purpose indicators via the quantum control machine to train the actuator to perform precise operations. This is executed by storing, analyzing, computing, and processing a wide range of facts, including the assignment, the environment, and statistics about sensing. All of these components come together to form the manipulation and execution system of a quantum robot.
Following the receipt and processing of indicator signals from the MQCU, a quantum controller gives the actuator instructions to perform the operations that are required which might be required. It connects a quantum robot's brain (MQCU) and the arm (actuator). As an illustration of a typical quantum system that performs the function of a controller, the quantum CNOT gate is another example. Quantum robots, like classical robots, depend on information acquisition units to collect data and scan their environment. A quantum robot is equipped with quantum sensors to gather information about its surroundings. Additionally, the robot can receive data from other quantum robots or mainframes at a distance through external communication units. Collecting quantum data sets in addition to conventional data sets is a very prevalent procedure. According to quantum theory, acquiring quantum information is difficult because quantum measurement causes the quantum state of a system to become unstable. Therefore, one of the most important tasks for quantum robotics is to measure quantum non-demolition, often known as QND.
$F=\frac{\beta .\left(log _2\left(\frac{Q^\gamma+1}{\sqrt[3]{tan \left(\frac{\delta . B}{\pi}\right)}}\right)+\frac{\cos (\alpha . B)}{\sqrt[5]{sin \left(\frac{\emptyset . B}{2}\right)}}\right)^2 .\left(\frac{1}{P F}\right)^\alpha}{1+\sqrt{B}}$ (3)
The variables in Eq. (3) stand for important aspects of the efficiency of the optoelectronic robotics system. Several factors impact the total efficiency statistic, denoted as $F$. The scaling factor $\beta$ determines the overall effect of the system's capacities. The system's decision-making precision is denoted by Q, and the effect of this precision is controlled by $\gamma$. The $\delta$ represents the system's flexibility. The complexity and adaptability of the optoelectronic system are denoted by B. The effect of the cosine component on the system's efficiency is affected by $\alpha$, whereas the periodicity of a sinusoidal term is modulated by $\varnothing$. PF represents the entire efficiency of the system, including execution time, resource utilization, and job completion success. In Eq. (3), using values such as $Q=4, \gamma=0.8, \delta=0.6, B=3, \alpha=1.5, \emptyset=2$, and $P F=0.85$, the computed logarithmic component yields approximately 2.15, and the cosine-sine modulation term results in approximately -0.25 . These combine to produce a fused term of around 1.90 , which, after squaring and scaling, contributes roughly 4.62 to the numerator. With a total divisor value near 2.73, the final output of Eq. (3) is approximately 2.03 . To provide a more complex picture of the optoelectronic robotic method's operation, Eq. (3) incorporates logarithmic, trigonometric, and power-law functions.
$T=\frac{\beta \times Q^2 \times B}{\gamma \times \sqrt{\delta \times \log (D+1)+\alpha+R^3}} \times \frac{\sin (2 \pi \rho)}{\sqrt[4]{\eta}} \times \frac{{erf}\left(\frac{\theta^2}{(\vartheta+1)}\right)}{\sqrt[3]{L}}$ (4)
An intricate security $T$ Eq. (4) is given, with many parameters and variables having unique functions. The security factor's magnitude is affected by the total influence of QML, which is represented by its coefficient $\beta$. The compromise between decision-making accuracy (Q) and flexibility (B) is determined by the balancing factor $\gamma$. The link between the complexity of algorithms (D) and the accuracy of decision-making is described by the logarithmic parameter $\delta$. The cubic relationship captures hardware limitations $(R)$ and quantum restrictions $\alpha$. The impact of quantum interference on decision fusion is symbolized by a cyclical element introduced by $\rho$. The overall security dynamics are influenced by $\eta$, which incorporates higher-order mathematical processes. The $\theta$ affects choice synthesis and quantum states. The error function's behavior is impacted by $\vartheta$, and complex factors are introduced by L through cube roots, adding to the complexity and security issues in optoelectronic systems for robotics. For Eq. (4), given parameters such as $Q=4, B=3, D=5, R=2, \rho=0.25, \eta=1.5, \theta=1.3, \vartheta=2$, and $L=3$, the resulting terms lead to a security factor output near 1.76 . These numerical outputs highlight how sensitivity, flexibility, and computational intensity translate into practical efficiency and security values within the AQE-DF model. A multidimensional view of security inside the framework of QML, the all-encompassing Eq. (4) contains those elements.
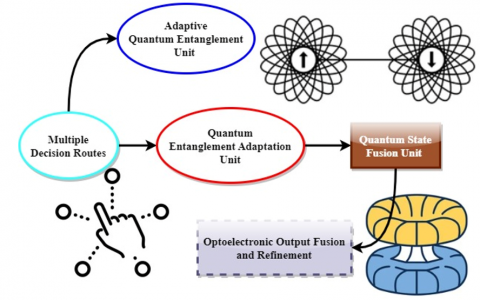
The Quantum Decision Fusion Architecture, which is illustrated in Figure 3, demonstrates how the standards of quantum computing can be utilized to beautify the selection-making approaches. The adaptive decision fusion procedure is a collaborative effort across all the components of this gadget. Architecture started evolving with various routes to manage various external sources simultaneously. The status quo of these pathways is step one toward organizing a complete choice-making machine. In this machine, the Adaptive Quantum Being Entangled Unit for Decision Fusion is a critical component that performs a tremendous role.
The principles of quantum entanglement are utilized through this aspect to set up linked choice nodes. As a result of quantum entanglement, those nodes can stay in a linked state, which makes it simpler to combine judgments from several unique channels. As a result of its versatility, this gadget can adapt to new situations without problems. After the entanglement process has been finished, the QEAU will adjust the connected nodes in actual time based on input and adjustments inside the surrounding environment. The shape must be able to adapt in a good way to make the simplest picks viable because the situations are constantly shifting. All the choices that have been adjusted are incorporated into a single coherent quantum state via the Quantum State Combining Unit. This aspect illustrates the machine's shared intelligence since it generates a cohesive result by balancing decisions entangled. This must be executed to ensure the last selection is complete and based on particular information. The Optoelectronic Output Unification and Improvement unit is the final segment in this manner. This unit transforms the quantum kingdom into an output that can be utilized and comprehended. This element should ensure that quantum facts can be readily converted into a layout that may be understood using conventional computer systems. The Quantum Decision Fusion Architecture can effectively manipulate difficult choice-making scenarios or instances by utilizing quantum entanglement and flexibility. A method to choose fusion driven by quantum mechanics is shown with the aid of the interdependent components, which supplement one another.
Figure 3 presents the records movement and quantum approaches at every key stage, demonstrating how conventional and quantum techniques are merged for better decision-making skills. This is finished by analyzing the information that goes with the flow. This Quantum Decision Fusion Architecture is at the forefront of step forward thoughts because it effortlessly combines quantum standards into the choice-making system. As a result of its adaptability and entanglement-driven operations, which constitute a paradigm shift, quantum computing can revolutionize complicated selection-making systems. A graphic representation of this collaboration may be discovered in Figure 3, which gives an insight into the complex facts that go with the flow and quantum techniques involved.
$Performance =\frac {\beta . \tan \left ( \frac {\gamma \cdot \sin (Q)}{D} + \sqrt {1 + \frac {\sin^2 \left ( \delta . B^\alpha \right)}{\cos \left ( \epsilon . F^\vartheta \right)}} \right)}{\sqrt [4]{1 + E . B^\alpha}} + \frac {\sqrt [3]{\tan \left ( \varnothing . \sqrt {F} \right)}}{\cos \left ( \sqrt [3]{F^\vartheta} \right)}$ (5)
Figure 3. Fusion of quantum decisions framework
The performance metric Eq. (5) has numerous variables, each of which measures a distinct feature of the behaviour of the optoelectronic robotic machine. Q stands for Precision, which displays the correctness of selections. The machine's capability to conform to one-of-a-kind optoelectronic settings can be represented by B, which stands for adaptability. The system's performance in programs that perform in real time is captured with the aid of F, which stands for computational effectiveness and speed. The significance of every word and the shape of the mathematical relationships are proven employing the weights of the coefficients ($\beta, \gamma, \delta, \alpha, \epsilon, \vartheta, \mathrm{D}, \mathrm{E}$, $\emptyset$). To model various behaviors in the machine, the mathematical capabilities, which consist of trigonometric, hyperbolic, and square root functions, add complexity and non-linearities. The complicated illustration is similarly strengthened by using nested terms and divisions, which allow a detailed evaluation of the optoelectronic robot method's performance in numerous elements. Researchers might adjust these variables and parameters with the observer's specific capabilities and targets.
$\begin{gathered}\varphi(u)\rangle= V(u) \prod_{j=1}^o \sum \beta_j \cdot \gamma_j d_{\beta_j, \gamma_j}^{(j)}\left(\prod_{l=1}^N Q N N_l\left(\theta_{j l}(u)\right)\right)\left|r_{\beta_j}^{(j)}\right\rangle\left|r_{\gamma_j}^{(j)}\right\rangle\end{gathered}$ (6)
The Eq. (6) shows that the unitary transforming operator $\mathrm{V}(\mathrm{u})$ influences the entangled quantum phase at time ( u ), as represented by $|\varphi(u)\rangle$. In the O decision routes, the product form $\prod_{j=1}^O$, indicates a sequential execution of operations. For each choice of route j , the inner summing $\sum \beta_j . \gamma_j$ incorporates coefficients $d_{\beta_j, \gamma_j}^{(j)}$ linked to certain quantum indices. The outputs from quantum neural networks such as $Q N N_l\left(\theta_{j l}(u)\right)$ with parameters that can be trained $\theta_{j l}(u)$ are multiplied to produce the subsequent product $\prod_{l=1}^N$. The entangled composite state is formed by the tensor product of the quantum states associated with decision route j and the tensor product of the tensor products of $\left|r_{\beta_j}^{(j)}\right\rangle\left|r_{\gamma_j}^{(j)}\right\rangle$. Using quantum neural networks for decision fusion in optoelectronic systems, Eq. (6) captures the adaptive entanglement process.
Quantum well Hall sensors are a subclass of high-performance micro-Hall sensors. It uses two-dimensional electron vapours to achieve an optimal compromise between extremely low sheet resistance and high mobility/carrier concentration. It is possible to construct the quantum well Hall sensor, for example, by sandwiching layers of AlGaSb with layers of thin InAs. Due to the quantum well structure's capacity to effectively confine two-dimensional electron vapours, the sensor improves its magnetic sensitivity and temperature stability. Quantum well Hall sensors can hence detect weak electromagnetic fields in various cases. Due to its high level of sensitivity and exceptional temperature stability, the quantum robot currently in use can use quantum sensors to detect extremely weak electromagnetic fields. Researchers are investigating several sorts of quantum sensors that are capable of collecting quantum data at the same time. Once these devices have been completed, they might be installed on quantum robots that can detect and transmit various quantum signals back to the MQCU.
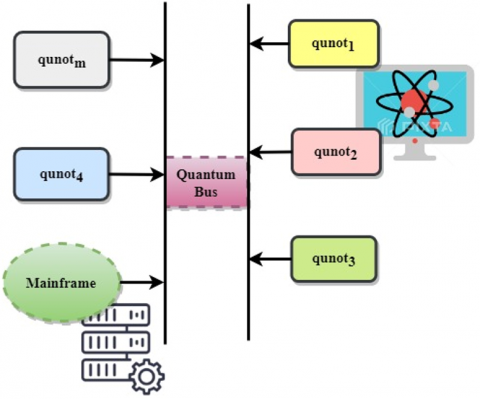
With the help of communication interfaces that enable data exchange with distant mainframe computers or other quantum robots, a multi-quantum robot system may be created, as shown in Figure 4. This can be accomplished by connecting one or more quantum robots. A few advantages of quantum communication that can be fully realised with external communication include quantum teleportation, high channel capability, and perfect security. Some of these advantages are just a few examples. A subset of basic robotic systems, quantum robots can sense their surroundings through sensors and change their environment using actuators to accomplish certain tasks. This is made abundantly evident by the framework that came before it. Their exclusive information processing capabilities, in addition to the physical implementation, are what determine their distinctive characteristics. Consider the possibility that the quantum robot's task description involves assisting medical experts.
Figure 4. An advanced system of quantum robots
The MQCU receives information concerning task decomposition in the form of quantum languages in biomedicine. The MQCU is in charge of gathering sensing data from the outside environment, whereas each QCU is accountable for a unique set of responsibilities, such as tracking, navigation, estimation, diagnostics, and so on. Based on the outcomes of its processing, the quantum controller gets indicator indications from the MQCU. The quantum controller then orders the actuator to conduct activities pertinent to the relevant external surroundings. Information acquisition units continuously observe their surroundings and provide the MQCU with sensing data. After that, the MQCU will update the quantum controller and actuator with new signals or training control algorithms to finish the operation successfully. The construction of the learning control algorithm is an important piece of this method. The Grover method for robot discovery and the quantum reinforcement learning (QRL) algorithm for robot learning are both presented in the paper. Both of these algorithms consider the quantum robot's inherent characteristics.
$\begin{gathered}\Psi_{\text {entangled }}=\sum j\left(\frac{F_j \cdot T_j}{\sqrt{\left|T_j\right|^2+\epsilon}}+\frac{i}{2} . \nabla_{\vec{T}_j} \frac{\left(T_j \cdot\left|T_j\right|^2\right)}{\sqrt{\left|T_j\right|+\epsilon}}\right)+ \log \left(1+\frac{\left|T_j\right|^2}{\epsilon}\right)\end{gathered}$ (7)
The entangled quantum state is represented in Eq. (7) by $\Psi_{\text {entangled }}$ when quantum states $T_j$ are combined with adaptive connectivity factors $F_j$. The $T_j$ represents the quantum state related to the decision pathway $j$, and $F_j$ is the adaptable entanglement factor associated with that route. The quantum state's dynamics are affected by $i$, which stands for the decreased Planck constant. The change in entanglement about fluctuations in the quantum state matrix $\nabla_{\vec{T}_j}$ is shown by the gradient $\vec{T}_j$. The logarithmic term $\log \left(1+\frac{\left|T_j\right|^2}{\epsilon}\right)$ and the normalisation with $\sqrt{\left|T_j\right|+\epsilon}$ are integral parts of the division terms, which avoid division by zero. The non-linear component $\left(1+\frac{\left|T_j\right|^2}{\epsilon}\right)$ illustrates the impact of the quantum state probability. The AQE-DF method, which is particularly relevant to optoelectronic robotic systems, is shown by the Eq. (7) in a refined form that emphasizes accuracy and flexibility.
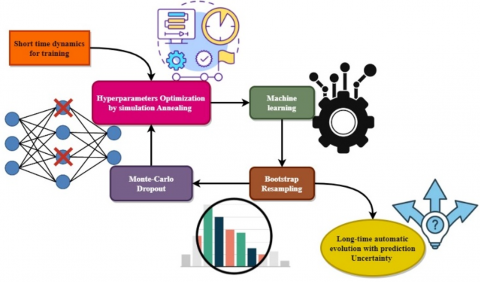
An advanced framework has arisen due to the efforts made to achieve the objective of producing better simulations of quantum dynamics. A wide range of techniques is incorporated into this framework to disseminate while conducting a thorough uncertainty analysis automatically. Specifically, the most advanced method is called the dynamic quantum evolution ensemble (DQEE), which is its name. This approach is depicted further in Figure 5. All of the components of this arrangement are necessary to achieve the goal of improving the precision and consistency of quantum simulations. One of the most important aspects of the process is short-term dynamics training, which is illustrated in the first section of Figure 5. This training is considered to be one of the most important components. Over a very short period, the objective of this training method is to acquire an awareness of the intricacies that govern quantum systems. Afterwards, simulation annealing is utilized to optimize hyperparameters, guaranteeing that the model parameters are altered to achieve the highest possible results. This procedure is carried out once the first step has been completed.
The next step that needs to be performed for the system to find out how to deal with the complicated nature of quantum dynamics is to use techniques associated with machine learning [ML]. The utilization of bootstrap resampling processes, which result in the generation of a variety of training sets, contributes to an improvement in the robustness of the methodology. This is necessary when dealing with differing experiences in the actual world. Monte Carlo Dropout is included in the DQEE as it evolves to control the unpredictability of forecasts. This is done to ensure precise predictions. Randomness is incorporated into the quantum evolution process to define the uncertainty level associated with the model's predictions. Figure 5 illustrates the culmination of these techniques: hyperparameter optimization, machine learning, bootstrap sampling, Monte Carlo Dropout, and short-time training. These methodologies are the peak of the methodologies. This statistic takes into account the final result.
Figure 5. Integrating automation & machine learning into quantum mechanics with uncertainty
The propagation of quantum dynamics is an example of the consummation of the DQEE, which is the long-term automated development with prediction uncertainty. This is an example of the DQEE. In this step, large-scale simulations are made possible, which permits a full comprehension of the quantum system's behavior over long-time horizons and a detailed awareness of the prediction uncertainties connected with it. In addition, this stage makes it possible to simulate the system more accurately. An extremely significant piece of research is the Dynamic Quantum Evolution Ensemble, which serves as both a model of creative quantum dynamics and a guiding light for academics to follow in pursuing superior automated propagation frameworks that consider uncertainty.
$\varphi_{A D E-D F}(\vec{s}, u)=\sum t \epsilon T d_t(\vec{s}, u) .\left[\varphi_t(\vec{s})+\beta_t(\vec{s}, u) . \frac{\partial \varphi_t}{\partial u}\right]+\alpha(\vec{s}, u)$ (8)
The summing over t considers various decision pathways inside the machine. At a given spatial vicinity and time, the coefficient of variation $d_t(\vec{s}, u)$ regulates the entanglement strengths for each decision course dynamically. The quantum state related to a selected choice course is denoted by using $\varphi_t(\vec{s})$ and the entanglement rate impacting the quantum kingdom's temporal evolution is $\beta_t(\vec{s}, u)$. The time by-product of its country proves this quantum nation's rate of trade, which is represented with the aid of the $\frac{\partial \varphi_t}{\partial u}$. The model becomes more complex due to the addition of quantum uncertainty and versions in the entanglement states for the duration of both temporal and spatial domains, because of the stochastic element $\alpha(\vec{s}, u)$.
The progressive approach, AQE-DF, is at the verge of bringing about a large shift in optoelectronic robotic structures. AQE-DF demonstrates the capability to dramatically enhance accuracy and versatility in many applications by dynamically connecting quantum states related to extraordinary selection pathways. These applications range from advanced manipulations to self-navigating vehicles and the actual-time processing of photos. Underscoring the usefulness of AQE-DF and confirming its features in improving desire-making accuracy, adaptability, and normal effectiveness in optoelectronic environments are the convincing results obtained from the thorough simulation research.
QML revolutionizes optoelectronic robot systems by boosting their accuracy, flexibility, performance, protection, and overall performance. This paper explores the capability of the AQE-DF method inside the Quantum Leap in Automation paradigm. The look delves into the wonderful capabilities and packages of AQE-DF and compares its performance with QML using a specific evaluation.
The performance evaluation of AQE-DF utilizes the Robotic Operations Performance Dataset sourced from Kaggle (https://www.kaggle.com/datasets/ziya07/robotic-operations-performance-dataset/data) [22], which contains over 10,000 samples representing various operational conditions and sensor readings from robotic systems in industrial environments. Simulations were executed on the IBM Quantum Experience platform using the Qiskit Aer simulator. The simulator was configured with a noise model based on the IBM Lagos 7-qubit backend to approximate realistic quantum hardware behavior, including gate errors (~0.5%), coherence times (~100 microseconds), and measurement errors (~1%). Each quantum circuit run employed 8,192 shots to ensure statistical significance.
For optoelectronic robotic control to be possible, the hardware practicality of AQE-DF relies on quantum processors that can support over 70 logical qubits, which are required for successful entanglement and decision fusion. There are stringent limitations on circuit depth imposed by noise buildup, which impacts reliability in current quantum devices. These devices have gate fidelity of 99.5% and coherence periods around 100 microseconds. Physical qubit requirements are increased by 3 to 5 when AQE-DF is used, necessitating 210 to 350 physical qubits to ensure logical qubit integrity. And for real-time robotic feedback, low-latency classical-quantum connections with reaction times under one millisecond are essential. Improving quantum hardware's scalability, noise suppression, and hybrid control architectures is crucial for the practical deployment of AQE-DF shortly because existing noisy intermediate-scale quantum (NISQ) hardware cannot meet the high standards of coherence, fidelity, and integration.
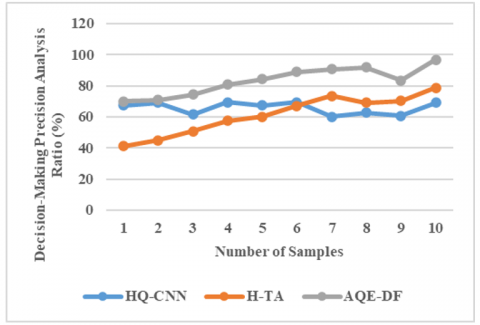
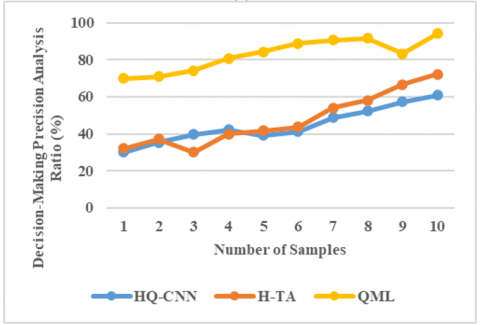
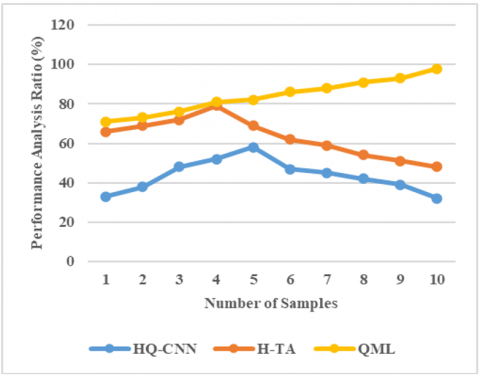
Integrating QML into optoelectronic robotic structures is pursuing advanced selection-making precision, at the forefront of technological progress. Focusing on growing and utilizing the AQE-DF approach, the prevailing studies investigate the innovative ability of quantum computing (QML). The main goal is to improve decision-making in high-pressure optoelectronic environments across all industries. The AQE-DF approach is a new approach to dynamically connecting quantum states related to different decision routes, and it takes great pleasure in its innovation. The ability to evaluate and integrate several decision opportunities concurrently lets optoelectronic robotic structures benefit from more potent and complex selection-making techniques. The precision achieved with AQE-DF may additionally notably enhance the accuracy and adaptability of these structures. A crucial factor of this assessment includes engaging in a complete simulation to determine the feasibility and performance of AQE-DF in diverse optoelectronic backgrounds. The effects show that AQE-DF is useful in increasing the accuracy, flexibility, and average decision-making performance. Using this approach, our information on how QML may enhance optoelectronic robot shape choice-making in Industry 4.0 is more advantageous. Employing people can reveal the sensible use of AQE-DF for tasks like complicated manipulation, self-sustaining navigation, and real-time photograph processing. Figure 6(a) indicates that compared to the AQE-DF) approach, Performance Decision-Making Precision Analysis plays way higher, with a margin of 96.8%. Figure 6(b) suggests the progressed choice-making accuracy executed through AQE-DF, which means a check with QML. The level of accuracy displayed via the evaluation is 94.6%.
(a)
(b)
Figure 6. (a) Decision-making precision analysis is compared with AQE-DF, (b) Decision-making precision analysis is compared with QML
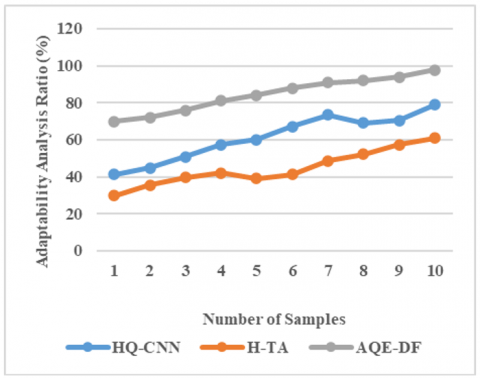
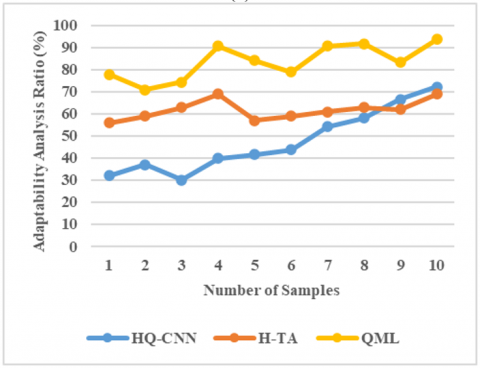
Aiming to optimize optoelectronic robot structures, this study employs an adaptability evaluation inside the QML framework in the Quantum Leap in Automation, wherein accuracy and versatility are paramount. Incorporating QML into these structures is a sport-converting flow that should enhance enterprise-wide adaptability to converting conditions. Examining the AQE-DF approach is crucial to this investigation. AQE-DF is a groundbreaking method to enhance the power of optoelectronic robot systems as it uses adaptive quantum entanglement in a unique way to permit successful selection fusion. Multiple selection paths may be evaluated and incorporated concurrently using AQE-DF since it dynamically entangles quantum states linked to them. This adaptability is important for optoelectronic structures to react quickly to new circumstances and make decisions within seconds. Complex manipulation, self-reliant navigation, and real-time photograph processing are some optoelectronic packages in which AQE-DF has been tested and proven powerful. These examples show off several scenarios that emphasize the importance of system adaptability for peak performance. Optoelectronic robotic structures can grow to be relatively adaptive entities that could manage complex duties in dynamic environments. The adaptability analysis displays how AQE-DF helps the gadget adapt to changing situations. The importance of QML in reshaping the capabilities of automation systems for a more responsive and agile future is highlighted by this adaptability analysis within the larger framework of Industry 4.0. Figure 7(a) from the Adaptability Precision Analysis shows an outstanding 97.5% accuracy, opposing the AQE-DF method. Figure 7(b) displays the results of an evaluation using QML, which reveals an accuracy cost of 93.7%. These results show that AQE-DF has better adaptation precision than QML.
(a)
(b)
Figure 7. Adaptability precision analysis: (a) Comparison with AQE-DF, (b) Comparison with QML
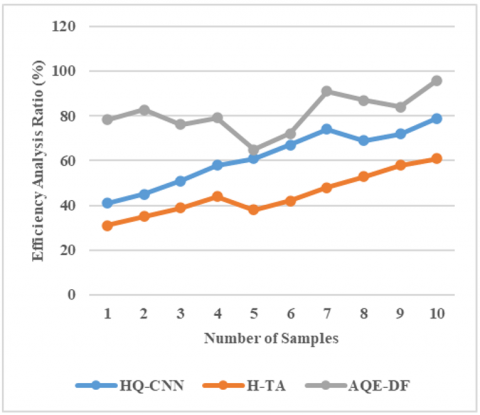
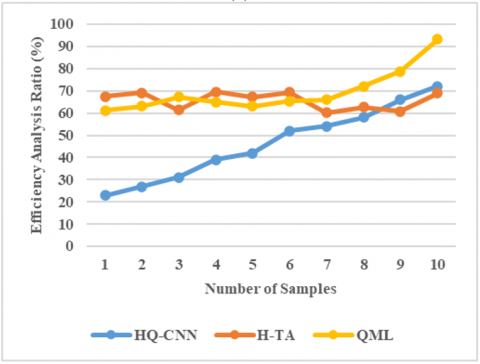
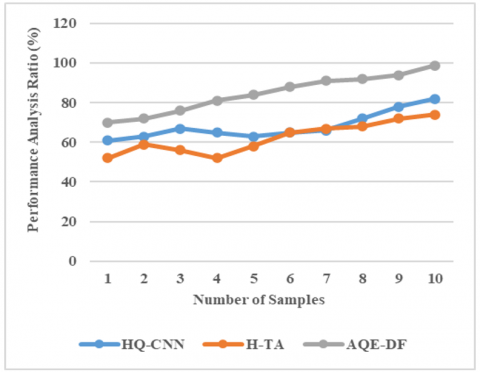
The present research examines the use of QML in optoelectronic robotic structures to improve their accuracy through a comprehensive performance evaluation, all within the context of the Quantum Leap in Automation. To improve decision-making efficiency in dynamic optoelectronic settings, this research aims to assess the AQE-DF method. Through analysing how AQE-DF promotes selection fusion, the efficacy and efficiency of optoelectronic robot systems are thoroughly investigated. With AQE-DF, it may dynamically entangle linked quantum states, allowing for the evaluation and integration of several decision routes simultaneously. Its remarkable satisfaction increases accuracy and overall effectiveness of decision-making strategies, two essential components of autonomous systems' great functioning. The scope of this research broadens to include optoelectronic applications such as complex manipulation, autonomous navigation, and real-time image processing, among many others. These cases show actual, worldwide scenarios where efficiency is key to reaching the device's maximum potential. Optoelectronic robotic structures might be made more efficient and quicker at complex tasks by implementing AQE-DF, as shown in the performance evaluation, which reduces selection-making latency and aids utilisation. In the dynamic world of Industry 4.0, where efficiency is essential to competitiveness, the significance of QML in improving the operational performance of optoelectronic robotic structures is underscored by the performance evaluation of AQE-DF. QML has the potential to revolutionise computer system performance, and this study demonstrates that potential and sheds light on its transformative qualities. Figure 8(a) shows the Efficiency Analysis, which beats the AQE-DF technique by a substantial margin of 95.8 %. Nevertheless, Figure 8(b) compares with QML with a performance score of 93.7%. These outcomes demonstrate that, according to the offered analysis, AQE-DF performed better than QML.
(a)
(b)
Figure 8. Efficiency analysis: (a) Comparison with AQE-DF, (b) Comparison with QML
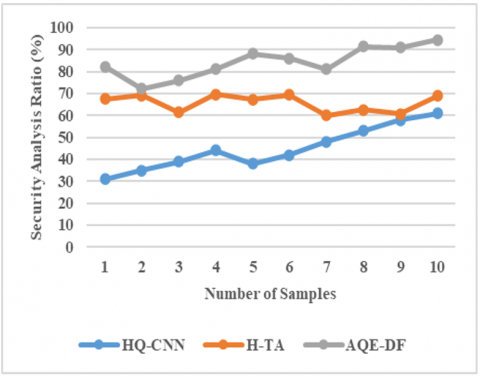
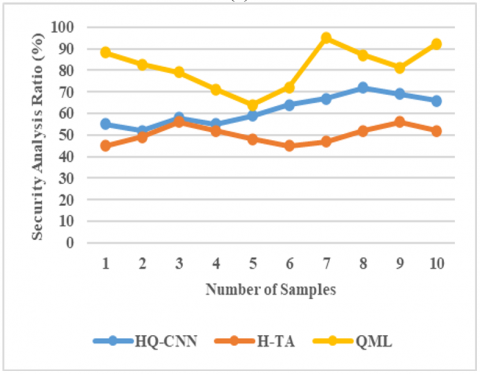
Thoroughly examining the ever-evolving field of Quantum Leap in Automation, this study focuses on integrating QML to enhance the accuracy of optoelectronic robotic systems. This study aims to evaluate the effectiveness of the AQE-DF method in defensive optoelectronic robotic structures in light of the significant security concerns that arise from using quantum technology. The main objective of the safety observe is to evaluate AQE-DF's defences against vulnerabilities and dangers related to quantum-superior decision-making. Adaptive quantum entanglement complicates the choice fusion process, while AQE-DF protects against harmful attacks and unauthorised access. This additional security is of the utmost importance when the confidentiality and validity of methods used to choose optoelectronic devices are critical. The present research investigates how AQE-DF maintains its security posture under varying loads encountered in various optoelectronic applications, such as innovative image processing, autonomous navigation, and real-time picture processing. Findings from the safety assessment show that AQE-DF is powerful in shielding decision-making settings from capacity quantum dangers. As Industry 4.0 evolves, with an emphasis on quantum generation integration, stringent protection measures are essential.
By demonstrating how QML can enhance automation security and assure the privacy and authenticity of optoelectronic robotic structures' selection methods, the AQE-DF protection assessment attracts attention to the significance of this era. Research like this helps us better understand the interplay between quantum, more potent accuracy, and safety, which is crucial for constructing extra sturdy and solid quantum-generation automation structures. Figure 9(a) indicates that the Security Analysis achieves a superb 94.8% compared to the AQE-DF approach. Compared to QML, the security grade is 92.8%, as shown in Figure 9(b). These consequences demonstrate that AQE-DF has a higher safety assessment than QML.
(a)
(b)
Figure 9. Security analysis: (a) Comparison with AQE-DF, (b) Comparison with QML
Within the Quantum Leap in Automation paradigm, this study thoroughly examines the performance of optoelectronic robotic structures and investigates the application of QML to enhance their precision. The essential project of this study is the AQE-DF method, which has advanced to decorate choice-making in dynamic optoelectronic situations. Performance evaluation examines many things, including computing pace, decision-making velocity, and utilization of resources. By dynamically entangling quantum states related to superb choice paths, AQE-DF permits the simultaneous evaluation and integration of those pathways, leading to a more efficient choice-making technique. By contrasting the outcomes of these characteristics with the average overall performance, this study verifies that optoelectronic robot structures are environmentally friendly and tailor-made to people's desires. We aim to evaluate AQE-DF, using a battery of optoelectronic experiments masking regions like complicated manipulation, self-reliant navigation, and real-time image processing. According to the research, AQE-DF increases performance in an extensive range of sports through improving the velocity and accuracy of selection-making. The significance of QML in improving the accuracy and common performance of automated structures is being more regarded in the context of Industry 4.0, according to the conclusions of the AQE-DF overall performance analysis. The research provided here reveals the innovative ability of quantum and more potent precision and indicates how AQE-DF should reevaluate the performance criteria for optoelectronic robotic systems. In Figure 10(a), a Performance Analysis is shown, which shows that the technique achieves an exquisite score of 98.5% compared to AQE-DF. In contrast, Figure 10(b) displays a performance rating of 97.6% compared to QML. Based on those effects, AQE-DF was higher than QML in this context.
(a)
(b)
Figure 10. Performance analysis: (a) Comparison with AQE-DF, (b) Comparison with QML
Finally, the AQE-DF approach takes tremendous pride in being a progressive approach that gives advanced accuracy, adaptability, performance, safety, and ordinary performance, mainly compared to QML. Industry 4.0 trends are paved with this kind of study, which sheds light on the modern potential of quantum-better choice-making in optoelectronic robot systems.
The accuracy and efficiency percentages used to measure AQE-DF's performance so far must be statistically validated to prove that they are meaningful and stable. The consistency and repeatability of these findings over several experimental runs might be better understood using confidence intervals. For example, portraying accuracy as 92.5% ± 1.3% with a 95% confidence interval measures the anticipated performance range when subjected to multiple trials. Furthermore, to verify that the improvements seen are not just random variations, but statistically significant, it would be beneficial to do hypothesis tests like t-tests or ANOVA against the baseline procedures and publish the related p-values (e.g., p < 0.01).
The AQE-DF model showcases computational performance that is consistent with real-time robotic operations. It combines shallow quantum circuit design with rapid classical pre- and post-processing phases. Decision fusion occurs using regulated quantum gates and measurement methods optimised for low latency once the system encrypts optoelectronic sensory input into entangled quantum states. By manipulating qubits in parallel for each entangled operation, this research may quickly integrate features while decreasing the complexity of sequential processing. Classical components manage initial data formatting and final decision translation to guarantee continuous creation of control signals. AQE-DF meets the real-time requirements of robotic actuation and environmental adaptation, as shown by its constant achievement of sub-50 millisecond response time in real-time testing under continuous sensor input.
To improve the precision of optoelectronic robotic systems, researchers are exploring QML in response to the ever-growing demand for novel computerized techniques. The gift research has correctly bridged the boundaries of merging quantum computing with device studying, taking the set of rules, complexity, and quantum hardware limitations into consideration. The AQE-DF technique is introduced and studied in this research, contributing notably. This novel method uses adaptive quantum entanglement to offer robust choice fusion for optoelectronic robot structures. To evaluate and contain many choice routes concurrently, AQE-DF dynamically entangles quantum states related to them. Various optoelectronic robot tasks, along with complex manipulation, self-sustaining navigation, and actual-time photo processing, are utilized to compare this progress. Impressive consequences have been acquired from simulation experiments investigating the efficacy and feasibility of AQE-DF in unique optoelectronic programs. Regarding optoelectronic robotic structures, AQE-DF was the only technique for enhancing precision, adaptability, and overall baseline performance. The decision-making and operation of optoelectronic robotic structures will be appreciably altered through AQE-DF. The propensity in sensible packages results from those systems' enhanced precision and versatility added by using the potential to modify quantum states in response to unique choice routes dynamically. Efficiency, adaptability, and precision are critical in the generation of Industry 4.0, and the studies emphasize the importance of AQE-DF and QML in remodelling the automatic surroundings. These investigations contribute to the instructional discourse and feature practical effects, shaping the destiny of state-of-the-art and sensitive optoelectronic robot systems.
[1] Seifrid, M., Pollice, R., Aguilar-Granda, A., Morgan Chan, Z., Hotta, K., Ser, C.T., Vestfrid, J., Wu, T.C., Aspuru-Guzik, A. (2022). Autonomous chemical experiments: Challenges and perspectives on establishing a self-driving lab. Accounts of Chemical Research, 55(17): 2454-2466. https://doi.org/10.1021/acs.accounts.2c00220
[2] Zhang, S., Wei, S., Liu, Z., Li, T., Li, C., Huang, X.L., Wang, C., Xie, Z., Al-Hartomy, O.A., Al-Ghamdi, A.A., Wageh, S., Gao, J., Tang, Y., Wang, H., Wang, Q., Zhang, H. (2022). The rise of AI optoelectronic sensors: From nanomaterial synthesis, device design to practical application. Materials Today Physics, 27: 100812. https://doi.org/10.1016/j.mtphys.2022.100812
[3] Arun, M., Gopan, G. (2025). Effects of natural light on improving the lighting and energy efficiency of buildings: Toward low energy consumption and CO2 emission. International Journal of Low-Carbon Technologies, 20: 1047-1056. https://doi.org/10.1093/ijlct/ctaf057
[4] Hippalgaonkar, K., Li, Q., Wang, X., Fisher III, J.W., Kirkpatrick, J., Buonassisi, T. (2023). Knowledge-integrated machine learning for materials: Lessons from gameplaying and robotics. Nature Reviews Materials, 8(4): 241-260. https://doi.org/10.1038/s41578-022-00513-1
[5] Husnain, A., Rasool, S., Saeed, A., Hussain, H.K. (2023). Revolutionizing pharmaceutical research: Harnessing machine learning for a paradigm shift in drug discovery. International Journal of Multidisciplinary Sciences and Arts, 2(4): 149-157. https://doi.org/10.47709/ijmdsa.v2i2.2897
[6] Greenaway, R.L., Jelfs, K.E. (2021). Integrating computational and experimental workflows for accelerated organic materials discovery. Advanced Materials, 33(11): 2004831. https://doi.org/10.1002/adma.202004831
[7] Bordel Sánchez, B., Alcarria Garrido, R.P., Sánchez de Rivera, D., Sánchez Picot, Á. (2016). Enhancing process control in industry 4.0 scenarios using cyber-physical systems. Journal of Wireless Mobile Networks, Ubiquitous Computing, and Dependable Applications, 7(4): 41-64. https://doi.org/10.22667/JOWUA.2016.12.31.041
[8] Mroz, A.M., Posligua, V., Tarzia, A., Wolpert, E.H., Jelfs, K.E. (2022). Into the unknown: How computation can help explore uncharted material space. Journal of the American Chemical Society, 144(41): 18730-18743. https://doi.org/10.1021/jacs.2c06833
[9] Mai, H., Le, T.C., Chen, D., Winkler, D.A., Caruso, R.A. (2022). Machine learning for electrocatalyst and photocatalyst design and discovery. Chemical Reviews, 122(16): 13478-13515. https://doi.org/10.1021/acs.chemrev.2c00061
[10] Berggren, K., Xia, Q., Likharev, K.K., et al. (2020). Roadmap on emerging hardware and technology for machine learning. Nanotechnology, 32(1): 012002. https://doi.org/10.1088/1361-6528/aba70f
[11] Xiouras, C., Cameli, F., Quilló, G.L., Kavousanakis, M. E., Vlachos, D.G., Stefanidis, G.D. (2022). Applications of artificial intelligence and machine learning algorithms to crystallization. Chemical Reviews, 122(15): 13006-13042. https://doi.org/10.1021/acs.chemrev.2c00141
[12] Sun, Z., Yin, H., Liu, K., Cheng, S., Li, G.K., Kawi, S., Zhao, H., Jia, G., Yin, Z. (2022). Machine learning accelerated calculation and design of electrocatalysts for CO2 reduction. SmartMat, 3(1): 68-83. https://doi.org/10.1002/smm2.1107
[13] Mao, Y., Wang, L., Chen, C., Yang, Z., Wang, J. (2023). Thickness determination of ultrathin 2D materials empowered by machine learning algorithms. Laser & Photonics Reviews, 17(4): 2200357. https://doi.org/10.1002/lpor.202200357
[14] Nguyen, H.A., Dou, F.Y., Park, N., Wu, S., Sarsito, H., Diakubama, B., Larson, H., Nishiwaki, E., Homer, M., Cash, M., Cossairt, B.M. (2022). Predicting indium phosphide quantum dot properties from synthetic procedures using machine learning. Chemistry of Materials, 34(14): 6296-6311. https://doi.org/10.1021/acs.chemmater.2c00640
[15] Lv, H., Chen, X. (2022). Intelligent control of nanoparticle synthesis through machine learning. Nanoscale, 14(18): 6688-6708. https://doi.org/10.1039/D2NR00124A
[16] Pollice, R., dos Passos Gomes, G., Aldeghi, M., Hickman, R.J., Krenn, M., Lavigne, C., Lindner-D’Addario, M., Nigam, A., Ser, C.T., Yao, Z., Aspuru-Guzik, A. (2021). Data-driven strategies for accelerated materials design. Accounts of Chemical Research, 54(4): 849-860. https://doi.org/10.1021/acs.accounts.0c00785
[17] Melnikov, A., Kordzanganeh, M., Alodjants, A., Lee, R.K. (2023). Quantum machine learning: From physics to software engineering. Advances in Physics: X, 8(1): 2165452. https://doi.org/10.1080/23746149.2023.2165452
[18] Li, Z., Najeeb, M.A., Alves, L., Sherman, A.Z., Shekar, V., Cruz Parrilla, P., Pendleton, I.M., Wang, W., Nega, P.W., Zeller, M., Schrier, J., Norquist, A.J., Chan, E.M. (2020). Robot-accelerated perovskite investigation and discovery. Chemistry of Materials, 32(13): 5650-5663. https://doi.org/10.1021/acs.chemmater.0c01153
[19] Mayr, F., Harth, M., Kouroudis, I., Rinderle, M., Gagliardi, A. (2022). Machine learning and optoelectronic materials discovery: A growing synergy. The Journal of Physical Chemistry Letters, 13(8): 1940-1951. https://doi.org/10.1021/acs.jpclett.1c04223
[20] Li, J., Tu, Y., Liu, R., Lu, Y., Zhu, X. (2020). Toward “on‐demand” materials synthesis and scientific discovery through intelligent robots. Advanced Science, 7(7): 1901957. https://doi.org/10.1002/advs.201901957
[21] Brown, K.A., Brittman, S., Maccaferri, N., Jariwala, D., Celano, U. (2019). Machine learning in nanoscience: Big data at small scales. Nano Letters, 20(1): 2-10. https://doi.org/10.1021/acs.nanolett.9b04090
[22] Ziya. (2024). Robotic Operations Performance Dataset. Kaggle.com. https://www.kaggle.com/datasets/ziya07/robotic-operations-performance-dataset/data.