Deepak Doreswamy![]() | Anupkumar M Bongale
| Anupkumar M Bongale![]() | Aman H Hegde
| Aman H Hegde![]() | Aiman Aatif Bayezeed
| Aiman Aatif Bayezeed![]() | Vaibhav Das
| Vaibhav Das![]() | Puneeth S
| Puneeth S![]() | Sathvik Bhat
| Sathvik Bhat![]() | Vamsi Krishna N
| Vamsi Krishna N![]() | Edel Castelino
| Edel Castelino![]() | Krrish Jain
| Krrish Jain![]() | Subraya Krishna Bhat*
| Subraya Krishna Bhat*![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This article presents a bibliometric analysis of the current research landscape and future prospects in the field of elastomeric soft pneumatic actuators (ESPAs) inspired by the human hand. Drawing inspiration from the intricate mechanisms of the human hand, the study maps out the research landscape in the field of ESPAs, highlighting recent advancements and emerging trends. By analyzing the leading countries, institutions, authors, journals, funding bodies, citation patterns and intellectual structures, the article identifies emerging themes and research directions, shedding light on the evolution of human hand inspired ESPAs. Finally, the literature analysis is synthesized in the form of a list of research topics which could further extend the horizons of research on ESPAs. The findings of this bibliometric analysis offer valuable guidance for researchers, practitioners, and policymakers in understanding the current state of ESPA research and charting future research agendas. By synthesizing and visualizing the research landscape, the article aims to foster collaboration, innovation, and interdisciplinary exchange in the field of soft robotics and human-machine interaction.
soft actuators, PneuNet, elastomers, soft robotics, hand
Soft robotics has emerged as a dynamic and interdisciplinary field, harnessing the principles of soft materials and novel actuation mechanisms for the development of versatile and adaptive robotic systems. Within this domain, elastomeric soft pneumatic actuators (SPAs) stand out as promising components due to their intrinsic compliance and adaptability. While soft actuators have been developed based on several bio-inspired designs, the human-hand is one of the most versatile systems which has inspired researchers to develop numerous types of SPAs. This bibliometric review delves into the landscape of research on human-hand inspired elastomeric SPAs, aiming to provide a comprehensive understanding of the field’s evolution, key contributors, and emerging trends. This may assist in revealing potential avenues for future exploration in the realm of elastomeric SPAs.
The exploration of elastomeric SPAs is crucial for advancing soft robotics applications, spanning from medical devices to human-machine interaction. Our bibliometric analysis draws on a diverse range of research articles, reviews, and contributions from notable researchers and journals. Notably, Rusu et al. [1] work on soft pneumatic actuators based on a novel casting method has garnered significant attention, underscoring the impact of manufacturing methods on SPA capabilities. Furthermore, Bao et al. [2] academic insights and perspectives through bibliometric analysis provide a valuable framework for evaluating the scientific publications in soft robotics, including SPAs. Pagoli et al. [3] review on soft fluidic actuators provides a valuable reference for the classification and materials used in modeling SPAs, offering a comprehensive overview of analytical, numerical, and model-free methods employed in SPA research. Furthermore, the work of Herianto et al. [4] introduces a novel design optimization method for SPAs, utilizing computer simulation and finite element analysis to enhance SPA performance. These contributions exemplify the multidisciplinary nature of elastomeric SPA research, integrating engineering, materials science, and biomechanics.
Delving into the bibliometric analysis, the goal of this article is to not only present a snapshot of the current state of elastomeric SPA research but also to identify emerging prospects and potential avenues for future exploration. By synthesizing information from a myriad of sources, we aim to provide researchers, practitioners, and enthusiasts with a roadmap for navigating the evolving landscape of soft robotics. The research questions of the present work include – analysis of global research trends on SPAs inspired by human hand’s dexterity, the top research funders, and scope for collaborations. The exploration of these research questions can help upcoming researchers in this field to take up suitable themes/collaborators to flourish and achieve success.
In summary, this bibliometric review article serves as a comprehensive resource for those engaged in or interested in elastomeric SPAs and soft robotics, particularly on human-hand inspired SPAs. By amalgamating insights from influential works and mapping the scholarly landscape, we aim to contribute to the ongoing discourse surrounding the development, challenges, and prospects of elastomeric soft pneumatic actuators. In the following sections, we delve into the methodology and results of our bibliometric analysis, shedding light on the current state of elastomeric SPAs research and outlining potential directions for future exploration. Finally, a survey of the findings and limitations of the top 40 highly cited articles in this area is presented which would be helpful to pave the way for identifying avenues of future research.
To comprehensively capture the evolving landscape of research trends in Elastomeric Soft Pneumatic Actuators (SPAs), a systematic search strategy was devised to retrieve relevant articles from the Scopus database. This methodology aimed to refine the search for articles specifically addressing elastomeric SPAs while excluding irrelevant content associated with the broader field of soft robotics.
Table 1. Search and exclusion keywords used for bibliometric analysis
|
Scopus Query String |
|
((TITLE-ABS-KEY (soft AND robotics OR soft AND actuator) AND TITLE-ABS-KEY ((pneunet OR pneumatic) AND (elastomer OR rubber)))) AND (hand) AND (EXCLUDE (EXACTKEYWORD, “Electromyography”) OR EXCLUDE (EXACTKEYWORD, “Hydrogels”) OR EXCLUDE (EXACTKEYWORD, “Dielectric Elastomer Actuators”) OR EXCLUDE (EXACTKEYWORD, “Dielectric Elastomers”) OR EXCLUDE (EXACTKEYWORD, “Electrodes”) OR EXCLUDE (EXACTKEYWORD, “Self-healing Materials”) OR EXCLUDE (EXACTKEYWORD “Magnetism”)) |
The search strategy involved the use of Boolean operators and relevant keywords to narrow down the results to those directly related to elastomeric SPAs. The following search strings were employed across the title, abstract and keywords section of the research articles (refer Table 1 for the full query string):
To eliminate irrelevant articles and maintain the specificity of the search, certain exclusion criteria were applied. Terms like “Electromyography”, “Dielectric Elastomer Actuators”, “Dielectric Elastomers”, “Electrodes”, “Self-healing Materials” and “Magnetism” were excluded to ensure a focus on articles discussing elastomeric materials in soft pneumatic actuation. The search was conducted on Scopus, a comprehensive scholarly database, ensuring coverage of a diverse range of journals and conference proceedings in the field of engineering and robotics [5]. The inclusion and exclusion criteria were implemented to obtain a dataset that specifically reflects research trends in elastomeric SPAs.
3.1 Global research output, leading countries, and application areas
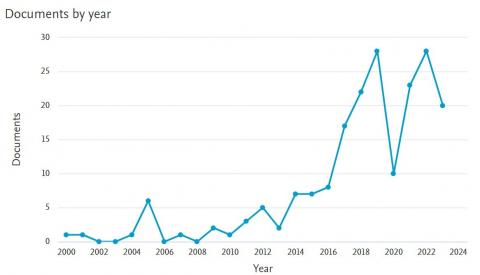
The Scopus search resulted in a total of 161 articles obtained from the Scopus database covering the period between 2000 to 2023. Figure 1 presents the number of publications on human-hand inspired SPAs over the years. The volume of publications during the first decade of 2000s was ≤ 5/year, except the year 2005. The emergence of human-hand inspired SPAs is seen prominently after the year 2014, wherein a rapid increase in the number of publications is observed. While it is not possible to pinpoint a specific cause for this, certain research initiatives in the surrounding years had an important role to play. For instance, the Defense Advanced Research Projects Agency (DARPA) ChemBots program in the USA launched in 2008, the Chinese national research funding initiative Tri-Co Robot in 2016, Coordination Action for Soft Robotics funded by the European Commission under the Future and Emerging Technologies (FET) – Open Scheme in 2013, the Japanese government support to innovative projects related to “Science of Soft Robots: Interdisciplinary integration of mechatronics, material science, and bio-computing” since 2018 [6-8], etc. The rapid growth after 2014 can be assessed as a total culmination of these various initiatives.
Figure 1. Number of publications on elastomeric soft pneumatic actuators by year
It is noteworthy that Japanese investigators spearheaded the early developments of human-hand inspired SPAs during the first decade of 2000. The group led by Noritsugu made pioneering contributions by developing rotary bending type SPAs made of silicone rubber with the goal of assisting elderly people and those undergoing hand motor skills rehabilitation [9-11]. The studies [12-15] designed and implemented soft robotic systems in conjunction with conventional joint-based hard robotic apparatus to mimic the human hand muscles and tendons. Japan’s focus on biomimicry, creating robots emulating the flexibility and adaptability of natural organisms, has inspired numerous international research projects. These bio-inspired approaches have led to breakthroughs in medical robotics and wearable technologies [1, 2]. Besides, the innovations in development of novel materials have set benchmarks for the development of flexible and adaptive robotic systems worldwide [9].
Over the course of the years, researchers from other countries have also contributed to develop technologies and solutions in this direction. China and USA stand at the second and third place based on the number of publications in this area between 2000 to 2023, see Figure 2. Naturally, this is reflected in the number of citations garnered by the publications. Japan [10-35] China [36-56], and USA [57-63] take the top three positions in terms of the citations received by the publications of researchers affiliated with their institutions, see Figure 3.
Figure 2. Top 10 countries by research output
Figure 3. Leading countries based on the number of citations to the articles published by affiliated researchers
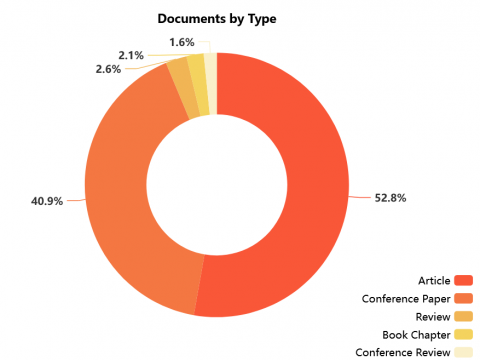
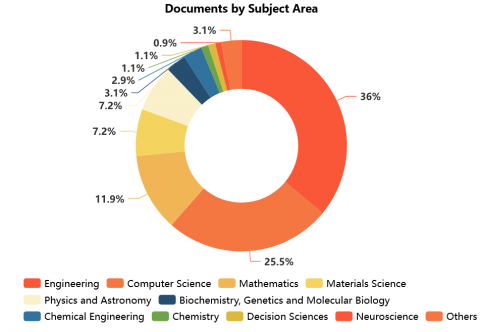
The distribution of articles based on the type of publications is shown in Figure 4. While close to 94% of the articles are either journal articles or conference publications, only 2.6% are review articles and, remaining being book chapters and conference reviews. The multi-faceted and multidisciplinary nature of this area of research is apparent by the distribution of subject areas in which published articles on human-hand inspired SPAs have been categorized, see Figure 5. It is therefore evident that there is a scope for revisiting, summarizing, and synthesizing the works conducted in this area through review articles keeping different perspectives and applications in mind.
Figure 4. Distribution of types of research publications
Figure 5. Distribution of subject areas of research output
3.2 Top institutions by research output and funding
The leading institutions conducting research in this area and their top sponsoring and funding agencies are summarized here. As observed in case of the country-wise distribution of research output, 6 out of the top 10 institutions based on the volume of the research output are Japanese and Chinese, with 4 and 6 institutions, respectively to their credit, see Figure 6. Okayama university has the most contributions with 27 articles. National University of Singapore stands at the close second position with 25 articles to its credit, followed by Universiti Teknologi Malaysia with 21 articles. Apart from these, Seoul National University of South Korea and Le Quy Don Technical University of Vietnam also have produced considerable output over the years with over 10 articles published with their affiliation.
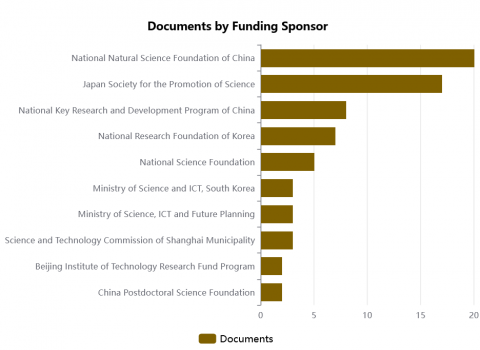
Publications are results of systematic research work which requires the funding to sustain the manpower and technical and non-technical infrastructure to support them. Hence, funding agencies play a major role in sustaining the research culture in any academic institution. It is observed that among the top 10 funding agencies according to number of publications, 4 belong to China, see Figure 7. The National Natural Science Foundation of China stands at the first position with 20 articles supported by their funding. Notably, only one Japanese funding agency, i.e., Japan Society for the Promotion of Science (JSPS) features in the top 10, at a close second position with 17 articles. Apart from this, agencies from South Korea and USA also find their place among the top 10 sponsors funding research on elastomeric SPAs.
Figure 6. Top institutions by research output
Figure 7. Top 10 sponsors funding research on SPAs
3.3 Principal research themes and their trends
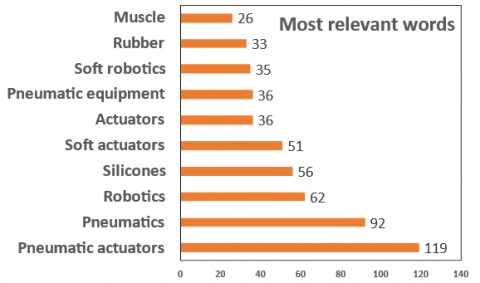
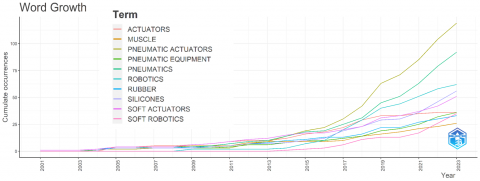
Soft robotics is a multi-disciplinary area of research encompassing different actuation methods, materials, and control systems. When it comes to SPAs, the top theme of research can be summarized by means of the most relevant keywords used in their publications. The actuation method, viz., “pneumatic actuators” and “pneumatics” are found to be comparatively the most prominent keywords, being used in 119 and 92 articles, respectively, see Figure 8. Silicone-rubbers seems to be the typically used materials for fabrication of these SPAs. The word growth pattern shown in Figure 9 highlights the rapid rise in the research in the topics related to “pneumatic actuators”, “pneumatics”, and “rubber” based materials.
Figure 8. Distribution of associated keywords
Figure 9. Trends in research themes over the years in terms of the growth of keywords
3.4 Leading journals by research publications and impact
The analysis of leading journals in this area of research shows that, “Actuators”, “IEEE Robotics and Automation Letters”, “Soft Robotics”, “IEEE International Conference on Intelligent Robots and Systems (IROS)”, and “Journal of Robotics and Mechatronics”, form the top 5 influential publications with respect to the quantity of the articles published, as shown in Figure 10. These same journals have a sway over most citations as well, as indicated by the superior H-index of the articles published in them (refer Figure 11).
Figure 10. Top 10 leading journals based on number of publications
Figure 11. Top 10 leading journals based on their H-index
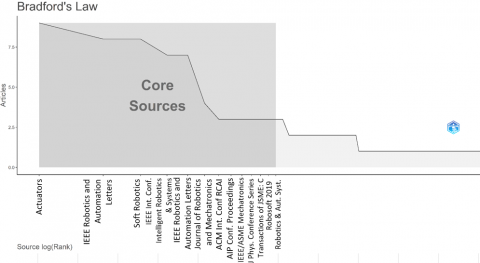
Bradford’s law, proposed by Samuel C. Bradford in 1934, is a bibliometric principle that describes the distribution of scientific literature across journals. It suggests that the number of articles on a particular subject is distributed in a series of concentric zones, with a small core of journals containing most relevant articles, followed by a zone with a greater number of journals containing fewer articles each, and finally, a large number of journals with only occasional articles on the subject [64-66]. This law helps researchers identify core journals where a significant portion of relevant literature is published, allowing for more efficient literature searches and resource allocation. Figure 12 shows the Bradford’s law’s perspective on articles published in the present topic. It is observed that distribution of articles in the different journals, with the influential journals, as shown in Figure 10 and Figure 11, being the most frequent publishers, is in accordance with Bradford’s law.
Figure 12. Distribution of articles in view of Bradford’s law
Bradford’s law helps identify the core journals that are most productive and influential in a particular field. These journals are crucial as they publish the highest concentration of significant research, guiding researchers on where to focus their literature searches and where to publish their work for maximum impact. Libraries and institutions can use this information to prioritize subscriptions to these core journals, optimizing their resources effectively. Furthermore, by examining changes in the distribution of articles over time, one can identify emerging research areas. If new journals start moving into the core zone, it signals a growing interest and significant developments in those areas. Conversely, if a topic shows a steady number of publications in core journals without expansion, it might indicate a mature or saturated research area. Funding bodies can use insights from Bradford's law to make informed decisions about where to allocate resources, focusing on high-impact areas and emerging fields with significant potential. Policymakers can leverage this analysis to support fields that are critical for societal advancement, ensuring that vital areas are well-supported and developed. This deeper understanding helps researchers, librarians, policymakers, and funding bodies make more informed decisions, ultimately advancing the progress and impact of scientific research.
3.5 Leading authors by research output, impact, and country of affiliation
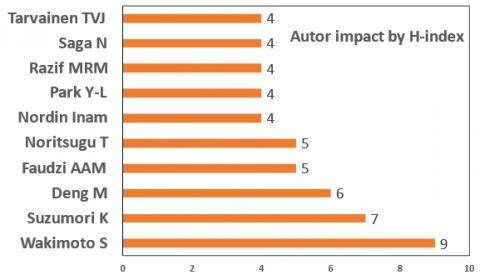
The leading authors by research output and their H-index are listed in Figure 13 and Figure 14, respectively. “Wakimoto, S.”, “Suzumori, K.”, and “Deng, M.” are found to be the top three most influential researchers in this area, both according to the number of research articles published and their H-index. Notably, “Wakimoto, S.” has established collaborative partnerships with both “Suzumori, K.” [17, 18, 67, 68] and “Deng, M.” [20, 25, 31, 69, 70], as evidenced by the frequent research publications. This has undoubtedly augmented their research output.
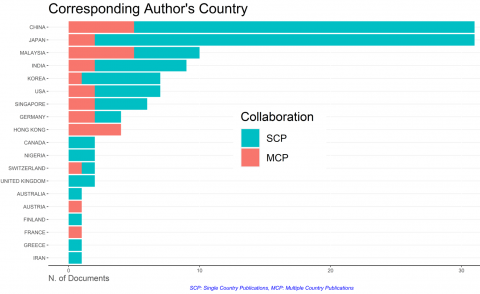
Figure 15 shows the countries to which the corresponding authors are affiliated with. China and Japan have a predominant influence because of the significantly higher number of research articles published by their researchers compared to other countries. Notably, more than 80% of these are single country publications (SCP) wherein all the authors belong to the same country. This indicates a scope for improved collaboration which other countries can explore with the leading countries to enhance their research output. Malaysia and India stand at third and fourth positions with almost 1/3rd the number of articles as China and Japan.
Figure 13. Leading authors based on the quantum of research output
Figure 14. Impact on the research field by the leading authors based on their H-index
Figure 15. Affiliated countries of the leading researchers
3.6 Research prospects
Based on the review of the research landscape on human hand inspired SMA actuators, some prospective topics of research are listed below:
These topics can help advance the capabilities, versatility, and practical applications of soft pneumatic actuators in mimicking the dexterity and functionality of the human hand.
The bibliometric review threw light on the developments and the rapid progress being made on human hand inspired ESPAs. Japan, China, and USA have emerged as the leading contributors of knowledge consolidating the technical research. Regarding the journals, ‘Actuators’, ‘IEEE Robotics and Automation Letters’, ‘Soft Actuators’, ‘IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)’, and ‘Journal of Robotics and Mechatronics’ are positioned occupy the top 5 positions with consistent publications over the last 24 years. ‘Wakimoto, S.’, ‘Suzumori, K.’, and ‘Deng, M.’ are the top 3 researchers based on their quantitative contributions and impact on the field. The survey also revealed that ESPAs involve multiple domain knowledge requirements such as materials development and improvisation, computational sciences, fabrication and manufacturing techniques, control-automation theory, etc. Although there exist certain constraints for commercialization of this technology for mass production, there is a strong potential and ample opportunities for practical implementation to address issues related to precise control and automation, wearable robotics, adaptive grasping and object detection, and sustainable energy-harvesting systems.
The authors express their gratitude to Manipal Institute of Technology, Manipal Academy of Higher Education, for the infrastructural support and encouragement provided to carry out this study.
[1] Rusu, D.M., Mândru, S.D., Biriș, C.M., Petrașcu, O.L., Morariu, F., Ianosi-Andreeva-Dimitrova, A. (2023). Soft robotics: A systematic review and bibliometric analysis. Micromachines, 14(2): 359. https://doi.org/10.3390/mi14020359
[2] Bao, G., Fang, H., Chen, L., Wan, Y., Xu, F., Yang, Q., Zhang, L. (2018). Soft robotics: Academic insights and perspectives through bibliometric analysis. Soft Robotics, 5(3): 229-241. https://doi.org/10.1089/soro.2017.0135
[3] Pagoli, A., Chapelle, F., Corrales-Ramon, J.A., Mezouar, Y., Lapusta, Y. (2021). Review of soft fluidic actuators: Classification and materials modeling analysis. Smart Materials and Structures, 31(1): 013001. https://doi.org/10.1088/1361-665X/ac383a
[4] Herianto, Wirt, I., Syahirul, R.A., Aishah, P. (2019). Design and fabrication in the loop of soft pneumatic actuators using fused deposition modelling. Sensors and Actuators A: Physical, 298: 111556. https://doi.org/10.1016/j.sna.2019.111556
[5] Doreswamy, D., Abdallah, Z., Bhat, S.K., Bongale, A.M. (2023). Research trends in abrasive water jet machining using numerical simulation tools: A bibliometric review. Recent Patents on Mechanical Engineering, 16(1): 19-31. https://doi.org/10.2174/2212797616666230127124019
[6] Laschi, C., Rossiter, J., Iida, F., Cianchetti, M., Margheri, L. (2017). Soft robotics: Trends, applications and challenges. In Proceedings of the Soft Robotics Week, Livorno, Italy. https://doi.org/10.1007/978-3-319-46460-2
[7] Nakajima, K., Li, T., Kuppuswamy, N., Pfeifer, R. (2011). How to harness the dynamics of soft body: Timing based control of a simulated octopus arm via recurrent neural networks. Procedia Computer Science, 7: 246-247. https://doi.org/10.1016/j.procs.2011.09.045
[8] Suzumori, K. (2022). Overview of the Kakenhi grant-in-aid for scientific research on innovative areas: Science of soft robots. Journal of Robotics and Mechatronics, 34(2): 195-201. https://doi.org/10.20965/jrm.2022.p0195
[9] Tauber, F., Desmulliez, M., Piccin, O., Stokes, A.A. (2023). Perspective for soft robotics: The field’s past and future. Bioinspiration & Biomimetics, 18: 035001. https://doi.org/10.1088/1748-3190/acbb48
[10] Noritsugu, T., Kubota, M., Yoshimatsu, S. (2001). Development of pneumatic rotary soft actuator made of silicone rubber. Journal of Robotics and Mechatronics, 13(1): 17-22. https://doi.org/10.20965/jrm.2001.p0017
[11] Sasaki, D., Noritsugu, T., Takaiwa, M. (2005). Development of active support splint driven by pneumatic soft actuator (ASSIST). In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, Barcelona, Spain, pp. 520-525. https://doi.org/10.1109/ROBOT.2005.1570171
[12] Yaegashi, K., Saga, N., Satoh, T. (2005). Control of robot arm using pneumatic artificial muscle with spherical joint. In IEEE International Conference Mechatronics and Automation, 2005, Niagara Falls, ON, Canada, 2: 1093-1098. 10.1109/ICMA.2005.1626704
[13] Saga, N. (2007). Development of a tendon driven system using a pneumatic balloon. Journal of Intelligent Material Systems and Structures, 18(2): 171-174. https://doi.org/10.1177/1045389X06063461
[14] Saga, N., Nakamura, T., Yaegashi, K. (2007). Mathematical model of pneumatic artificial muscle reinforced by straight fibers. Journal of Intelligent Material Systems and Structures, 18(2): 175-180. https://doi.org/10.1177/1045389X06063462
[15] Nagase, J.Y., Saga, N. (2010). Design of tendon-driven robot hand using pneumatic balloon actuators. In 2010 World Automation Congress, Kobe, Japan, pp. 1-6.
[16] Shinohara, T., Dohta, S., Matsushita, H. (2005). Development of a pneumatic bending soft-actuator and its application. Transactions of the JSME (C), 71(711): 3167-3173.
[17] Wakimoto, S., Ogura, K., Suzumori, K., Nishioka, Y. (2009). Miniature soft hand with curling rubber pneumatic actuators. In 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, pp. 556-561. https://doi.org/10.1109/ROBOT.2009.5152259
[18] Wakimoto, S., Suzumori, K., Ogura, K. (2011). Miniature pneumatic curling rubber actuator generating bidirectional motion with one air-supply tube. Advanced Robotics, 25(9-10): 1311-1330. https://doi.org/10.1163/016918611X574731
[19] Nagase, J.Y., Wakimoto, S., Satoh, T., Saga, N., Suzumori, K. (2011). Design of a variable-stiffness robotic hand using pneumatic soft rubber actuators. Smart Materials and Structures, 20(10): 105015. https://doi.org/10.1088/0964-1726/20/10/105015
[20] Deng, M., Wang, A., Wakimoto, S., Kawashima, T. (2011). Characteristic analysis and modeling of a miniature pneumatic curling rubber actuator. In the 2011 International Conference on Advanced Mechatronic Systems, Zhengzhou, China, pp. 534-539.
[21] Faudzi, A.A.M., Razif, M.R.M., Nordin, I.N.A.M., Suzumori, K., Wakimoto, S., Hirooka, D. (2012). Development of bending soft actuator with different braided angles. In 2012 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pp. 1093-1098. https://doi.org/10.1109/AIM.2012.6266037
[22] Takashima, K., Noritsugu, T., Rossiter, J., Guo, S., Mukai, T. (2012). Curved type pneumatic artificial rubber muscle using shape-memory polymer. Journal of Robotics and Mechatronics, 24(3): 472.
[23] Nagase, J.Y., Saga, N., Satoh, T., Suzumori, K. (2012). Development and control of a multifingered robotic hand using a pneumatic tendon-driven actuator. Journal of Intelligent Material Systems and Structures, 23(3): 345-352. https://doi.org/10.1177/1045389X1142059
[24] Taniguchi, H., Toyooka, H., Minatohara, T., Fukuda, M., Zhao, F. (2012). Pneumatic rubber actuators for a rehabilitation device to prevent contractures of finger joints. In 2012 19th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, pp. 420-424.
[25] Kawashima, T., Wang, A., Wakimoto, S., Deng, M. (2013). Sensorless nonlinear control for a miniature pneumatic curling rubber actuator using robust right coprime factorization and SVR estimation. IEEJ Transactions on Electronics, Information and Systems, 133(10): 1924-1929. https://doi.org/10.1541/ieejeiss.133.1924
[26] Tanaka, D., Kamo, D., Watanabe, T., Maehara, M., Nakamura, T. (2013). Development of a 7-DOF manipulator actuated by straight-fiber-type pneumatic artificial muscle. In 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, pp. 300-306.
[27] Nordin, I.N.A.M., Faudzi, A.A.M., Razif, M.R.M., Natarajan, E., Wakimoto, S., Suzumori, K. (2014). Simulations of two patterns fiber weaves reinforced in rubber actuator. Jurnal Teknologi, 69(3): 133-138.
[28] Yoshioka, R., Wakimoto, S., Suzumori, K., Ishikawa, Y. (2014). Development of pneumatic rubber actuator of 400μm in diameter generating bi-directional bending motion. In 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, pp. 1-6. https://doi.org/10.1109/ROBIO.2014.7090298
[29] Ribuan, M. N., Suzumori, K., Wakimoto, S. (2014). New pneumatic rubber leg mechanism for omnidirectional locomotion. International Journal of Automation Technology, 8(2): 222-230. https://doi.org/10.20965/ijat.2014.p0222
[30] Amase, H., Nishioka, Y., Yasuda, T. (2015). Mechanism and basic characteristics of a helical inflatable gripper. In 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, pp. 2559-2564. https://doi.org/10.1109/ICMA.2015.7237890
[31] Fujita, K., Deng, M., Wakimoto, S. (2017). A miniature pneumatic bending rubber actuator controlled by using the PSO-SVR-based motion estimation method with the generalized Gaussian kernel. Actuators, 6(1): 6. https://doi.org/10.3390/act6010006
[32] Yamada, Y., Nakamura, T. (2019). Laminated foam-based soft actuator for actuatable flexible structure. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, pp. 4359-4364. https://doi.org/10.1109/IROS40897.2019.8967522
[33] Yuan, P., Kawano, G., Tsukagoshi, H. (2019). Soft pneumatic helical actuator with high contraction ratio. In 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, pp. 8300-8305. https://doi.org/10.1109/IROS40897.2019.8968281
[34] Arai, T., Hama, K., Chiba, K., Mikami, S. (2019). Development of finger rehabilitation device using pneumatic actuator made of nylon film. In Proceedings of the 7th ACIS International Conference on Applied Computing and Information Technology, HI, Honolulu, USA, pp. 1-6. https://doi.org/10.1145/3325291.3325378
[35] Takashima, K., Iwamoto, D., Oshiro, S., Noritsugu, T., Mukai, T. (2021). Characteristics of pneumatic artificial rubber muscle using two shape-memory polymer sheets. Journal of Robotics and Mechatronics, 33(3): 653-664. https://doi.org/10.20965/jrm.2021.p0653
[36] Bao, G.J., Ma, X.L., Luo, X.Y., Shao, T.F., Zhang, L.B., Yang, Q.H. (2014). Full compliant continuum robotic finger and its kinematic model. Iranian Journal of Science and Technology. Transactions of Mechanical Engineering, 38(M2): 389.
[37] Zhao, H., Li, Y., Elsamadisi, A., Shepherd, R. (2015). Scalable manufacturing of high force wearable soft actuators. Extreme Mechanics Letters, 3: 89-104. https://doi.org/10.1016/j.eml.2015.02.006
[38] Yap, H. K., Lim, J. H., Nasrallah, F., Low, F.Z., Goh, J. C., Yeow, R.C. (2015). MRC-glove: A fMRI compatible soft robotic glove for hand rehabilitation application. In 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, pp. 735-740. https://doi.org/10.1109/ICORR.2015.7281289
[39] Ni, F., Rojas, D., Tang, K., Cai, L., Asfour, T. (2015). A jumping robot using soft pneumatic actuator. In 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, pp. 3154-3159. https://doi.org/10.1109/ICRA.2015.7139633
[40] Tarvainen, T.V., Yu, W. (2015). Preliminary results on multi-pocket pneumatic elastomer actuators for human-robot interface in hand rehabilitation. In 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, pp. 2635-2639. https://doi.org/10.1109/ROBIO.2015.7419737
[41] Sun, Y., Song, S., Liang, X., Ren, H. (2016). A miniature soft robotic manipulator based on novel fabrication methods. IEEE Robotics and Automation Letters, 1(2): 617-623. https://doi.org/10.1109/LRA.2016.2521889
[42] Low, J.H., Yeow, C.H. (2016). Rod-based fabrication of customizable soft robotic pneumatic gripper devices for delicate tissue manipulation. Journal of Visualized Experiments, e54175. https://doi.org/10.3791/54175
[43] Zhou, J., Chen, S., Wang, Z. (2017). A soft-robotic gripper with enhanced object adaptation and grasping reliability. IEEE Robotics and Automation Letters, 2(4): 2287-2293. https://doi.org/10.1109/LRA.2017.2716445
[44] Yap, H.K., Lim, J.H., Nasrallah, F., Yeow, C.H. (2017). Design and preliminary feasibility study of a soft robotic glove for hand function assistance in stroke survivors. Frontiers in Neuroscience, 11: 270774. https://doi.org/10.3389/fnins.2017.00547
[45] Tian, M., Xiao, Y., Wang, X., Chen, J., Zhao, W. (2017). Design and experimental research of pneumatic soft humanoid robot hand. In Robot Intelligence Technology and Applications 4: Results from the 4th International Conference on Robot Intelligence Technology and Applications, Springer International Publishing, pp. 469-478. https://doi.org/10.1007/978-3-319-31293-4_37
[46] Ge, L., Wang, T., Zhang, N., Gu, G. (2018). Fabrication of soft pneumatic network actuators with oblique chambers. Journal of Visualized Experiments, 138: 58277. https://doi.org/10.3791/58277
[47] Xu, Z., Bai, Y., Ni, R., Yang, N., Sun, Y., Qi, P. (2018). Anthropomorphic soft pneumatic fingers towards full dexterity of human hand. In 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, pp. 381-386. https://doi.org/10.1109/HUMANOIDS.2018.8625023
[48] Wang, J., Fei, Y., Pang, W. (2019). Design, modeling, and testing of a soft pneumatic glove with segmented pneunets bending actuators. IEEE/ASME Transactions on Mechatronics, 24(3): 990-1001. https://doi.org/10.1109/TMECH.2019.2911992
[49] Liu, Y., Chen, W., Xiong, C. (2019). Simulation and fabrication of a pneumatic network actuator with capability of bending in multi-planes. In 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, pp. 313-317. https://doi.org/10.1109/AIM.2019.8868457
[50] Zhou, X., Jiang, X. (2019). Analysis and Research Based on Soft Bending Pneumatic Actuator. In 2019 IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), Chengdu, China, pp. 2329-2333. https://doi.org/10.1109/ITNEC.2019.8729353
[51] Zhang, Q., Weng, S., Zhao, Z., Qi, H. J., Fang, D. (2021). Soft pneumatic actuators by digital light processing combined with injection-assisted post-curing. Applied Mathematics and Mechanics, 42(2): 159-172. https://doi.org/10.1007/s10483-021-2705-7
[52] Li, Y., Zhou, W., Wu, J., Hu, G. (2021). A dynamic modeling method for the bi-directional pneumatic actuator using dynamic equilibrium equation. Actuators, 11(1): 7. https://doi.org/10.3390/act11010007
[53] Gao, R., Fang, J., Qiao, J., Li, C., Zhang, L. (2022). The bending control of the soft pneumatic fìnger. Journal of Physics: Conference Series, 2181(1): 012060. https://doi.org/10.1088/1742-6596/2181/1/012060
[54] Goia, L.S., Campo, A.B., Colón, D. (2022). Modelling, control and applications of soft pneumatic actuators in upper-limb exoskeletons: A systematic review. In 2022 Latin American Robotics Symposium (LARS), 2022 Brazilian Symposium on Robotics (SBR), and 2022 Workshop on Robotics in Education (WRE), São Bernardo do Campo, Brazil, pp. 1-6. https://doi.org/10.1109/LARS/SBR/WRE56824.2022.9996030
[55] Zhang, K., Fan, Y., Shen, S., Yang, X., Li, T. (2023). Tunable folding assembly strategy for soft pneumatic actuators. Soft Robotics, 10(6): 1099-1114. https://doi.org/10.1089/soro.2022.0166
[56] Hao, T., Xiao, H., Liu, Y., Pang, D., Liu, S. (2023). Gripping performance of soft grippers with fingerprint-like surface texture for objects with slippery surfaces. Tribology International, 189: 108992. https://doi.org/10.1016/j.triboint.2023.108992
[57] Martinez, R.V., Glavan, A.C., Keplinger, C., Oyetibo, A. I., Whitesides, G. M. (2014). Soft actuators and robots that are resistant to mechanical damage. Advanced Functional Materials, 24(20): 3003-3010. https://doi.org/10.1002/adfm.201303676
[58] Argiolas, A., Mac Murray, B.C., Van Meerbeek, I., Whitehead, J., Sinibaldi, E., Mazzolai, B., Shepherd, R. F. (2016). Sculpting soft machines. Soft Robotics, 3(3): 101-108. https://doi.org/10.1089/soro.2016.0004
[59] Lawrence, A.B., Alspach, A.N., Bentivegna, D.C. (2016). Mechanical implementation of a variable-stiffness actuator for a softly strummed ukulele. In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, pp. 376-382. https://doi.org/10.1109/IROS.2016.7759082
[60] Shih, B., Drotman, D., Christianson, C., Huo, Z., White, R., Christensen, H.I., Tolley, M.T. (2017). Custom soft robotic gripper sensor skins for haptic object visualization. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, pp. 494-501. https://doi.org/10.1109/IROS.2017.8202199
[61] Almubarak, Y., Maly, N.X., Tadesse, Y. (2018). Fully embedded actuators in elastomeric skin for use in humanoid robots. Electroactive Polymer Actuators and Devices, 10594: 229-239. https://doi.org/10.1117/12.2300940
[62] Geer, R., Li, S. (2018). Examining the coiling motion of soft actuators reinforced with tilted helix fibers. In Smart Materials, Adaptive Structures and Intelligent Systems, American Society of Mechanical Engineers, 51951: V002T06A005. https://doi.org/10.1115/SMASIS2018-8038
[63] Bruck, H.A., Acevedo, R., Rohwerder, J., Johnson, L., Gupta, S.K. (2019). Layered jamming multifunctional actuators. In Mechanics of Composite, Hybrid and Multifunctional Materials, Volume 5: Proceedings of the 2018 Annual Conference on Experimental and Applied Mechanics, Springer International Publishing, pp. 169-179. https://doi.org/10.1007/978-3-319-95510-0_19
[64] Bradford, S.C. (1934). Sources of information on specific subjects. Engineering 137: 85-86.
[65] Viju, V.G.W., Ganesh, V. (2013). Application of Bradford’s Law of scattering to the literature of library & information science: A study of doctoral theses citations submitted to the Universities of Maharashtra, India. Library Philosophy and Practice, 1-45.
[66] Yang, J.M., Tseng, S.F., Won, Y.L. (2016). A bibliometric analysis on data mining using Bradford’s law. In Proceedings of the 3rd International Conference on Intelligent Technologies and Engineering Systems (ICITES2014) Springer International Publishing, pp. 613-620. https://doi.org/10.1007/978-3-319-17314-6_78
[67] Ogura, K., Wakimoto, S., Suzumori, K., Nishioka, Y. (2009). Micro pneumatic curling actuator-Nematode actuator. In 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, pp. 462-467. https://doi.org/10.1109/ROBIO.2009.4913047
[68] Wakimoto, S., Ogura, K., Suzumori, K., Nishioka, Y. (2009). Miniature soft hand with curling rubber pneumatic actuators. In 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, pp. 556-561. https://doi.org/10.1109/ROBOT.2009.5152259
[69] Sudani, M., Deng, M., Wakimoto, S. (2018). Modelling and operator-based nonlinear control for a miniature pneumatic bending rubber actuator considering bellows. Actuators, 7(2): 26. https://doi.org/10.3390/act7020026
[70] Kawamura, S., Sudani, M., Deng, M., Noge, Y., Wakimoto, S. (2019). Modeling and system integration for a thin pneumatic rubber 3-DOF actuator. Actuators, 8(2): 32. https://doi.org/10.3390/act8020032
[71] Wang, Y., Hao, T., Liu, Y., Xiao, H., Liu, S., Zhu, H. (2024). Anthropomorphic soft hand: Dexterity, sensing, and machine learning. Actuators, 13(3): 84. https://doi.org/10.3390/act13030084
[72] Wang, H., Abu-Dakka, F.J., Le, T.N., Kyrki, V., Xu, H. (2020). A novel design of soft robotic hand with a human-inspired soft palm for dexterous grasping. arXiv preprint arXiv:2009.00979. https://doi.org/10.48550/arXiv.2009.00979
[73] Walker, J., Zidek, T., Harbel, C., Yoon, S., Strickland, F. S., Kumar, S., Shin, M. (2020). Soft robotics: A review of recent developments of pneumatic soft actuators. Actuators, 9(1): 3. https://doi.org/10.3390/act9010003
[74] Pan, M., Yuan, C., Liang, X., Dong, T., Liu, T., Zhang, J., Bowen, C. (2022). Soft actuators and robotic devices for rehabilitation and assistance. Advanced Intelligent Systems, 4(4): 2100140. https://doi.org/10.1002/aisy.202100140
[75] Tauber, F.J., Slesarenko, V. (2023). Early career scientists converse on the future of soft robotics. Frontiers in Robotics and AI, 10: 1129827. https://doi.org/10.3389/frobt.2023.1129827
[76] Wang, H., Abu-Dakka, F.J., Le, T.N., Kyrki, V., Xu, H. (2021). A novel soft robotic hand design with human-inspired soft palm: Achieving a great diversity of grasps. IEEE Robotics & Automation Magazine, 28(2): 37-49. https://doi.org/10.1109/MRA.2021.3065870
[77] Zhang, N., Zhao, Y., Gu, G., Zhu, X. (2022). Synergistic control of soft robotic hands for human-like grasp postures. Science China Technological Sciences, 65(3): 553-568. https://doi.org/10.1007/s11431-021-1944-y
[78] Ibrahim, H.A., Ammar, H.H., Shalaby, R. (2022). Modeling and control of a novel design of series elastic actuator for upper limb rehabilitation. Mathematical Modelling of Engineering Problems, 9(1): 85-93. https://doi.org/10.18280/mmep.090111
[79] Bharadwaj, D., Dutt, D. (2021). Design and development of low-level automation for the picking and placing of the object using pneumatic suction. Journal Européen des Systèmes Automatisés, 54(6): 865-870. https://doi.org/10.18280/jesa.540608
[80] Ahmed, A.S., Kadhim, S.K. (2023). Non-Leaner Control on the Pneumatic Artificial Muscles: A Comparative Study Between Adaptive Backstepping and Conventional Backstepping Algorithms. Mathematical Modelling of Engineering Problems, 10(2): 653-662. https://doi.org/10.18280/mmep.100236
[81] Genovese, A., Strano, S., Terzo, M. (2020). Design and multi-physics optimization of an energy harvesting system integrated in a pneumatic suspension. Mechatronics, 69: 102395. https://doi.org/10.1016/j.mechatronics.2020.102395
[82] Shveda, R.A., Rajappan, A., Yap, T.F., Liu, Z., Bell, M. D., Jumet, B., Sanchez, V., Preston, D.J. (2022). A wearable textile-based pneumatic energy harvesting system for assistive robotics. Science Advances, 8(34): eabo2418. https://doi.org/10.1126/sciadv.abo2418