Bashar Mohammed Salih*![]() | Safwan Assaf Hamoodi
| Safwan Assaf Hamoodi![]() | Ali Nathim Hamoodi
| Ali Nathim Hamoodi![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This research explores the use of contemporary controllers, especially fuzzy logic, to improve how the wind turbine systems react on external disturbances such as blades distortion. The study concentrates on these controllers’ workability in relation to the speed control for turbines integrated into the network-based management and production system, using a wind turbine with permanent magnet synchronous generator (PMSG). Pitch of the blade control strategies are being compared using a comparative analysis between traditional ones and the one with multiple variables performed in terms of fuzzy logic controller. The focus here is on the assessment of how such controllers affect the transient speed signals, with a brief mention regarding the average value derived from simulations. The results show that the fuzzy logic-PI control significantly outperforms the standard controllers in terms of wind turbine speeding performance.
small scale wind turbine, PMSG, PI controller, fuzzy logic controller, disturbance signal
Nowadays, pitch-adjustable variable speed wind turbines have superseded all other types of wind turbine than the past years. With the development of wind energy technology, the optimization of control mechanisms is very important to improve efficiency and overall performance. This study focuses on the use of a fuzzy PI controller to control the pitch angle deployed in wind turbine blades. In contrast to the traditional PI controllers, the fuzzy logic method introduces an element of flexibility and a rule-based decision making based upon a collection of defined rules. This paper is aimed at highlighting the specific features and benefits of the fuzzy PI controller, since it plays a vital role in improving the wind turbine systems’ response to external influences including distortions on blades. By performing a comprehensive comparison, we seek to unveil how the fuzzy PI controller performs better than the conventional PIs controllers and thus making it easier for the control methods in wind energy dynamics.
Figure 1. Variable wind turbine speed structure
In the variable-speed wind turbines, there are typically two controllers which couple to each other as in Figure 1. If the speed controller is capable of keeping that amount of tip speed which leads to highest capacity factor, efficiency will also be increased in low wind speeds below rated value following as far. Pitch angle adjustment is necessary if wind speed exceeds rated wind speed during constant rotating speeds of the turbine [1, 2].
This paper is devoted to the analysis of a classical approach for pitch angle control that utilizes several regulating variables. Even though PI controllers are commonly applied in pitch control schemes, system dynamics knowledge is necessary [3]. The system does not have to be familiar, and it is possible that some of its nonlinearity are significant. In order to control the power system, a fuzzy pitch angle controller is recommended. Based on these three defined objectives, a fuzzy logic pitch angle controller is designed and tested in this study [4, 5].
Since the wind turbine’s output power is below its rating, we need an optimum pitch angle for this situation. A fuzzy logic pitch angle controller is built and tested on the basis of these three objectives [6, 7]:
• Behind, on the other hand below the rated wind speed and there is a need to ensure that the pitch angle has an optimal value for yielding maximum power.
• Resolution of the input power should not to exceed the design limits in pitch angle presents an extremely efficient way of regulating aerodynamic output and loads stemming from the rotor.
• Reduce the heavy burden of the mechanical components in a turbine.
In the end, conclusions are made when modeling and comparison of blade pitch process control models is finished. While the process of conventional power sources’ decline and rise in amount environmental pollutants has become an important question only recently. New clean energy resources point out to the necessity of huge electricity production as mentioned in the study [8]. Wind energy is one of the effective solutions to these issues. Wind potential unpredictability in the area of a power plant, however is one challenge that tends to feature as companies strive to produce electricity from wind energy. Therefore, to achieve optimal efficiency the torque of WT rotor must be controlled depending on wind velocity variations [9].
Comprehensive evaluations of FL control system usage in electricity systems, particularly in RE systems, are available. A PMSG WT pitch angle monitoring approach relies on PI and FL regulating approaches [10]. They also improved system reflexes to ensure smoothness and eliminate output power drops. Figure 2 depicts the authors' WT configuration, and they conducted a comparison study of the WT control methods that use the MATLAB/Simulink programming package [11].
Figure 2. Proposed work layout of WT
2.1 Wind turbine modeling
Figure 3 depicts the wind turbine under investigation, and Table 1's generator data provides an illustration.
Figure 3. 1KW wind turbine
Table 1. PI-parameters
|
Controller |
Kp |
Ki |
|
PI |
15 |
20 |
The optimal Cp value of the wind turbine should be maintained in order to fully utilize available wind energy, resulting in maximum Cp. Eq. (1) shows the output power of a wind turbine which depends on its regime.
$P=0\cdot 5\rho A{{v}^{3}}$ (1)
The mechanical energy that wind turbines can obtain from the wind is given by Eq. (2).
${{P}_{\omega t}}=P{{C}_{p}}\left( \beta .\lambda \right)$ (2)
From Eq. (1) and Eq. (2):
${{P}_{wt}}=0\cdot 5\rho A{{v}^{3}}{{C}_{p}}\left( \beta .\lambda \right)$ (3)
At higher levels, Eq. (4) shows a non-linear relationship that varies with wind speed.
${{C}_{p}}=0\cdot 5176\left( \frac{116}{{{\lambda }_{i}}}-0\cdot 4\beta -5 \right){{e}^{\frac{-21}{{{\lambda }_{i}}}}}+0\cdot 0068\lambda $ (4)
In Eq. (5), the $Cp$ value is calculated in place of the ${{\lambda }_{i}}~$value from Eq. (4).
$\frac{1}{{{\lambda }_{i}}}=\frac{1}{\lambda +0\cdot 08\beta }-\frac{0\cdot 035}{3\beta +1}$ (5)
TSR is characterized by the proportion of blade angle speed to wind rate speed in Eq. (6).
$\lambda =\frac{{{\omega }_{\omega t}}R}{v}$ (6)
Eq. (4) and Eq. (5) show that changing the $\beta $ angle changes the ${{C}_{p}}$ power parameter. This principle governs wind turbine power control. Mechanical output power is another variable in the case of wind turbines [12, 13].
2.2 Wind turbine actuator
Electrical or hydraulic actuator systems can be used. Two benefits of the electrical actuators are position accuracy and rapid dynamic response. In electronic actuators, the servo motor controls individual blades. This survey’s actuator is a DC servo motor. The study focuses on the dynamics of blades with respect to nonlinearity in pitch angle and rate. These states are neglected in this work and linear pitch angle and blade dynamics tendencies should be considered. The transfer function of the servo motor in Eq. (7) is shown below:
${{G}_{s}}\left( s \right)=\frac{C}{\tau s+B}$ (7)
Eq. (8) describes the transfer function in position control.
${{G}_{p}}\left( s \right)=\frac{C}{s\left( \tau s+B \right)}$ (8)
By simplifying, the transfer function can be expressed as shown in Eq. (9). Due to the simplicity of computation, the motor parameters are set to 1.
${{G}_{p}}\left( s \right)=\frac{1}{s\left( s+1 \right)}$ (9)
2.3 Controller design
Two structures of the controller are adopted, the conventional controller is PI, and the proposed controller is fuzzy logic PI controller.
2.3.1 Design of a PI controller system
Figure 4 shows a schematic of the PI controller. The PI control method is rampant today. While a variety of uses have been found for PI applications, there is no universally accepted definition [14]. The Kp and Ki parameters for a PI controller are estimated using the Ziegler-Nichols method, as shown in Table 2.
Figure 4. PI block diagram
Table 2. Parameters of the wind turbine under study
|
Parameter |
Value |
|
Rotor diameter of the blades |
2.8m |
|
Blade/material & quantity |
3 pieces/handcrafted FRP |
|
Rated capacity |
1000W |
|
Maximum power |
1500W |
|
Rated rotation speed |
400(r/min) |
|
Torque at start-up |
0.4(N.M) |
|
Voltage output is optional (DC) |
24-48V |
|
Wind speed during startup |
3m/s |
|
Rating for wind-speed |
8m/s |
|
Working values of wind-speed |
3-25m/s |
|
Max. design wind-speed |
40m/s |
|
The high of the tower |
6m |
|
Total weight |
55kg |
2.3.2 The fuzzy logic-PI control system design
Though closed-loop system compares the reference and actual speed of rotor, difference between them represents error signal (e) while change in value of e is given by ($\text{e}$) It involved the use of a fuzzy logic-based control method to develop this system. A basic adaptive non-linear control system is fuzzy control [15, 16]. Error and error change can be considered as two forms of fuzzy input. Although Mamdani is a rule base and fuzzification engine, the centroid works as defuzzification. The pitch angle change is the output variable [17].
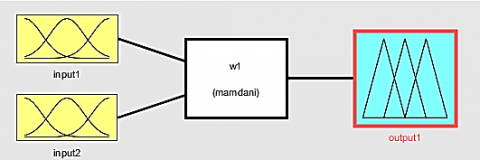
Figure 5 shows a block diagram of fuzzy controller system that uses dc servo motor actuator.
Figure 5. Structural layout of a fuzzy controller system
Secondly, in the case of structure Fuzzy Adaptive PI controller; it consists of two parts: Conventional PI Controller and a fuzzy logic control portion. Linguistic control strategies are the basis of fuzzy logic controllers, which convert expert knowledge into automatic controller settings. The Mamdani rules are structured as in Table 3.
Table 3. Mamdani rules
|
Rule |
e |
Δe |
Out |
|
1 |
High |
Maximum |
Very high |
|
2 |
High |
Medium |
High |
|
3 |
High |
Minimum |
Rather high |
|
4 |
Medium |
Maximum |
Medium high |
|
5 |
Medium |
Medium |
Medium |
|
6 |
Medium |
Minimum |
Medium low |
|
7 |
Low |
Maximum |
Rather low |
|
8 |
Low |
Medium |
Low |
|
9 |
Low |
Minimum |
Very low |
The rules that apply the fuzzy logic system in systems with dynamics complicated or strong nonlinearity like unsteady wind encompassing considerable turbulence are beneficial. Thus, the most popular control systems are those based on advanced ones since one of such is sought to minimize stress loads. Since fuzzy logic controllers reason like people make judgments, the controller rules are knowledge based on system expertise. The main benefit of fuzzy logic control in a wind turbine is that it does not rely on an ideal representation or linear design. Where the fuzzy logic design used in this work is shown on Figure 6.
Figure 6. Fuzzy logic structure
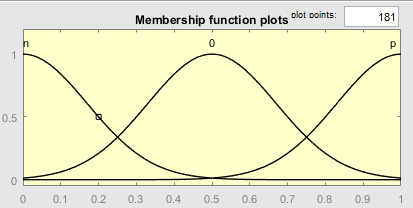
Figure 7. Membership function of fuzzy logic controller
Table 4. Rule base of fuzzy logic controller
|
e/Δe |
NB |
NS |
ZE |
PS |
PB |
|
NB |
NB |
NB |
NS |
NS |
ZE |
|
NS |
NB |
NS |
NS |
ZE |
PS |
|
ZE |
NS |
NS |
ZE |
PS |
PS |
|
PS |
NS |
ZE |
PS |
PS |
PB |
|
PB |
ZE |
PS |
PS |
PB |
PB |
The low sensitive of Figure 7 displays the fuzzy logic principles that were used in this design at lower mean wind speeds.
Pitch angle control entails a bigger pitch angle reaction to the control options than at a higher mean wind speed, Table 4 illustrates this.
The following considerations (which do not take wind speed into account) can be used to quickly and simply comprehend the logic of the controller:
- The output power angle is excessively large and its amplitude grows if e (error) and Δe (change in error) are negative, necessitating a quick reduction in the current pitch angle.
- The output power is more than its reference when e is negative and Δe is positive, but its amplitude reduces, necessitating the least amount of pitch angle fluctuation.
- If e is modest, pitch angle fluctuation must be smoothed since significant changes can set off oscillatory modes.
Other benefits of the fuzzy logic controller over traditional controllers include non-linear control strategies, linguistic rules implementation and self error tendency consideration when an error becomes small. The fuzzy logic control will center on controlling the pitch of wind turbine blades as performance coefficient for wind turbines is highly dependent upon the angle between which it operates. In fuzzy logic every object changes over time and this will be an important role in the oscillation, which is minimized by altering linguistic logical conditions or intervals.
The fuzzy logic controller at its output, the error and derivative of the error are input; a signal that controls pitch angle is produced [18, 19].
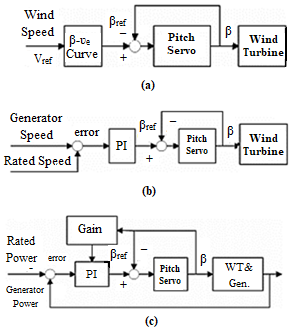
Figure 8 shows the classical approaches to the blade pitch angle regulation. The input parameters such as wind speed determine the pitch angle reference (βref). The control method is very simple, using the blade angle versus wind speed curve; since the wind speed is also a directly measurable quantity [20, 21].
While the wind crosses the blades, they induce rotation associated with a drive shaft attached to an electric generator which registers its own speed of rotation [22]. Wind turbine control to ensure the reliable power capture, safe operation and also structural strength is therefore very important.
In Figure 8 (a), the wind speed is shown in the graph. The reference value for blade pitch is defined in terms of the angle between the blades and the wind speed curve. This method is very simple since it directly measures the wind speed.
The rotor speed of the generator is shown in Figure 8 (b). There is a comparison between the controlled rotor speed and its reference. Upon detection of the error signal, a proportional-integral (PI) controller determines the pitch angle reference value βref.
In Figure 8 (c) generator power is shown in the given sentence. For a high wind speed, the error signal of the generator power is provided to PI controller. The pitch angle produced by the PI controller resulting from this has nonlinear fluctuations with respect to wind speed, which means low aerodynamic torque sensitivity [23]. Higher wind speeds require an increased controller gain as even the minor pitch changes can affect the torque. Linear changes in the pitch angle adjustment affect torque sensitivity but are also counterbalanced by linear variations of controller gain. Finally, gain scheduling proves to be helpful in the pitch angle control as a method for the adjustment of gains to the operating point. But because of the sensitivity to aerodynamic torque and also turbine dynamics, further changes may be required [24, 25].
Figure 8. Proposed work layout of WT, (a) The speed of the wind, (b) The rotor speed of generator, (c) The power of generator
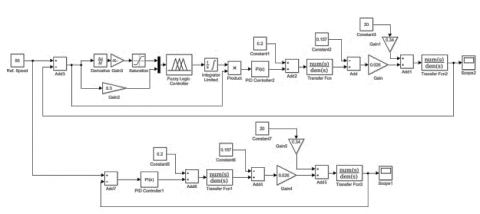
Eqs. (1) to (9) represent the wind turbine mathematical model that is used in this work. Figure 9 shows the simulation circuit implemented by Matlab/Simulink.
Figure 9. Matlab/Simulink diagram
The description of Matlab/Simulink circuit block is as follows:
The input signal represents the reference speed, and the second stage takes the difference between the reference signal and the actual signal (error signal). This error is entered into the conventional PI controller and fuzzy adaptive PI controller stages in parallel to control the pitch angle, sum with a tolerance value of 0.2, apply to the actuator unit, subtract from it the value of 0.157 (wind speed difference), and then apply to the wind turbine gain block with the effect of disturbance values of (100, 80, 60, 40, and 20) to study the effect of disturbance on the wind turbine performance.
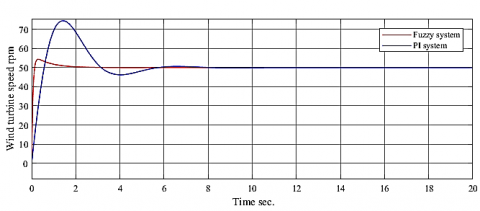
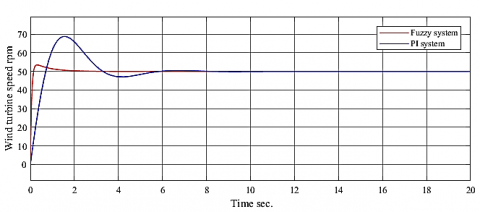
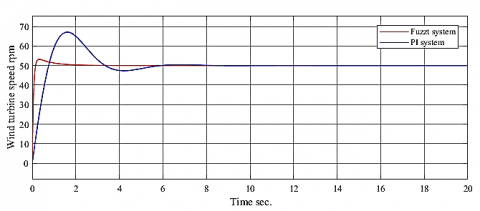
Based on a fuzzy logic-PI method, Figure 10 depicts the relationship between the speed of a wind turbine with respect to time at various disturbance values.
(a) D=34
(b) D=27.5
(c) D=20.4
(d) D=13.6
(e) D=6.8
Figure 10. Wind turbine speed ${{\nu }_{s}}~$ time under both PI and fuzzy logic controller at disturbance
(a) PI-controller
(b) Fuzzy logic-PI-strategy
Figure 11. Merge of speed curves
All speed curves of the wind turbine under PI and fuzzy logic-PI strategy are depicted in Figure 11.
In two cases of PI and fuzzy logic-PI, the peak over shot and settling time for the disturbance signal of the transient behavior are shown.
Table 5. Response time of fuzzy logic
|
Disturbane |
PI Controller |
Fuzzy Logic-PI |
||
|
Peak Over Shoot (p.o.s%) |
Settling Time (s) |
Peak Over Shoot (p.o.s%) |
Settling Time (s) |
|
|
100×0.34 |
48.9 |
13 |
8 |
2.5 |
|
80×0.34 |
45.02 |
10.5 |
6.2 |
2 |
|
60×0.34 |
41.22 |
10 |
4.3 |
2 |
|
40×0.34 |
37.56 |
10 |
4 |
1.75 |
|
20×0.34 |
34.2 |
8.5 |
2.8 |
1.75 |
From Table 5, it can be shown that using fuzzy logic controllers improves both the p. o. s. ratio and the settling time. In comparison to using PI controllers, the enhancement ratio for p. o. s. was above 80% for all cases, and the settling time was reduced by more than 8 sec. for all disturbances.
In short, the research of small-scale wind turbine control methods based on PI and fuzzy PI controllers against different sets of disturbances allows for identifying their impact in improving system output performance. The effectiveness of the PI controllers in their most recent implementation to achieve robust performance and also regulate important features confirms their receptiveness to error signals. However, the implementation of fuzzy-PI controllers brings about a much higher degree of adaptability and intelligent decision-making that enhances responsiveness to uncertainties as well as other fluctuations associated with various wind conditions. This flexibility greatly increases the efficiency and power conversion capability of small wind turbines. Thus, based on the above-received results, it is seen that the fuzzy logic-PI control block outperformed the PI controller in terms of p. o. s. ratio and settling time, with significant improvements given as follows: the observed improvement can be attributed to its profound impact on the behavior of the system dynamics by showing up as a clear and consistent acceleration in responsiveness and robustness.
We would like to express our gratitude to Northern Technical University's Technical College of Engineering in Mosul, Iraq.
|
P |
Power of wind turbine (W) |
|
|
A |
Area that the blades swept m2 |
|
|
ν |
Speed of the wind turbine m/s |
|
|
R |
Blade length m |
|
|
$B\And C$ |
Motor constants |
|
|
Greek symbols |
||
|
$\beta $ |
Angle of pitch (deg.) |
|
|
$\lambda $ |
Speed of tip ratio |
|
|
ρ |
Density of the air kg/m3 |
|
|
$\tau$ |
Time constant |
|
|
${{\omega }_{\omega }}t$ |
Angular speed of a turbine (rad/sec) |
|
|
${{C}_{P}}$ |
Coefficient of the power |
|
[1] Salomao, L.A.T., Cuatzin, H.G., Marín, J.A., Castillo, I.I.L. (2012). Fuzzy-PI control, PI control and fuzzy logic control comparison applied to a fixed speed horizontal axis 1.5 MW wind turbine. In Proceedings of The World Congress on Engineering and Computer Science, 2: 24-26.
[2] Kumar, H., Gupta, A., Pachauri, R.K., Chauhan, Y.K. (2015). PI/FL based blade pitch angle control for wind turbine used in wind energy conversion system. In 2015 International Conference on Recent Developments in Control, Automation and Power Engineering (RDCAPE), pp. 15-20. https://doi.org/10.1109/RDCAPE.2015.7281362
[3] Gaur, P., Pathak, D., Kumar, B., Chauhan, Y.K. (2016). PI and fuzzy logic controller based tip speed ratio control for smoothening of output power fluctuation in a wind energy conversion system. In 2016 7th India International Conference on Power Electronics (IICPE), pp. 1-6. https://doi.org/10.1109/IICPE.2016.8079480
[4] Zhang, J., Cheng, M., Chen, Z., Fu, X. (2008). Pitch angle control for variable speed wind turbines. In 2008 Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies, pp. 2691-2696. https://doi.org/10.1109/DRPT.2008.4523867
[5] Iqbal, A., Ying, D., Saleem, A., Hayat, M.A., Mehmood, K. (2020). Efficacious pitch angle control of variable-speed wind turbine using fuzzy based predictive controller. Energy Reports, 6: 423-427. https://doi.org/10.1016/j.egyr.2019.11.097
[6] Hamoodi, S.A., Hameed, F.I., Hamoodi, A.N. (2020). Pitch angle control of wind turbine using adaptive fuzzy-PID controller. EAI Endorsed Transactions on Energy Web, 7(28): e15. https://doi.org/10.4108/eai.13-7-2018.165500
[7] Zamzoum, O., El Mourabit, Y., Errouha, M., Derouich, A., El Ghzizal, A. (2018). Power control of variable speed wind turbine based on doubly fed induction generator using indirect field‐oriented control with fuzzy logic controllers for performance optimization. Energy Science & Engineering, 6(5): 408-423. https://doi.org/10.1002/ese3.215
[8] Griche, I., Messalti, S., Saoudi, K. (2019). Parallel fuzzy logic and PI controller for transient stability and voltage regulation of power system including wind turbine. Przegląd Elektrotechniczny, 95: 51-56. https://doi.org/10.15199/48.2019.09.10
[9] Zhou, F., Liu, J. (2018). Pitch controller design of wind turbine based on nonlinear PI/PD control. Shock and Vibration, 2018. https://doi.org/10.1155/2018/7859510
[10] DAHBI, A., Benmedjahed, M., Khelfaoui, A., Aoun, N., Harrag, A., Bouraiou, A., Benlahbib, B., Sara, K., Abdeldjalil, S., Neçaibia, A., Chogueur, D., Mouhadjer, S., Hamouda, M., Tidjar, B., Oudran, A., Kadri, A.Y., Belhadj, Z. (2022). A Comparative study between MPPT using PI and fuzzy logic control for wind turbine system. In 2022 19th International Multi-Conference on Systems, Signals & Devices (SSD), pp. 1228-1233. https://doi.org/10.1109/SSD54932.2022.9955879
[11] Sheikhan, M., Shahnazi, R., Nooshad Yousefi, A. (2013). An optimal fuzzy PI controller to capture the maximum power for variable-speed wind turbines. Neural Computing and Applications, 23: 1359-1368. https://doi.org/10.1007/s00521-012-1081-4
[12] Aissaoui, A.G., Tahour, A., Essounbouli, N., Nollet, F., Abid, M., Chergui, M.I. (2013). A Fuzzy-PI control to extract an optimal power from wind turbine. Energy Conversion and Management, 65: 688-696. https://doi.org/10.1016/j.enconman.2011.11.034
[13] Salih, B.M., Nawafal, K., Hamoodi, S.A. (2023). Enhancing the maximum power of wind turbine using artificial neural network. Bulletin of Electrical Engineering and Informatics, 12(5): 2535-2542. https://doi.org/10.11591/eei.v12i5.5019
[14] Omer, K., Fawaz, S., Ali, N. (2016). Modeling and analysis of 1kW wind turbine generator using Matlab Simulink. International Journal of Enhanced Research in Science, Technology & Engineering, 5(7): 243-254.
[15] Mirzaei, M., Tibaldi, C., Hansen, M.H. (2016). PI controller design of a wind turbine: Evaluation of the pole-placement method and tuning using constrained optimization. Journal of Physics: Conference Series, 753(5). https://doi.org/10.1088/1742-6596/753/5/052026
[16] Civelek, Z., Lüy, M., Çam, E., Barışçı, N. (2016). Control of pitch angle of wind turbine by fuzzy PID controller. Intelligent Automation & Soft Computing, 22(3): 463-471. https://doi.org/10.1080/10798587.2015.1095417
[17] Kamel, R.M., Chaouachi, A., Nagasaka, K. (2010). RETRACTED: Wind power smoothing using fuzzy logic pitch controller and energy capacitor system for improvement Micro-Grid performance in islanding mode. Energy, 35(5): 2119-2129. https://doi.org/10.1016/j.energy.2010.01.030
[18] Ram, A.G., Lincoln, S.A. (2012). Fuzzy adaptive PI controller for single input single output non-linear system. ARPN Journal of Engineering and Applied, Sciences, 7(10): 1273-1280.
[19] Saleh, A.S., Hamoodi, S.A., Hamoodi, A.N. (2023). Optimal planning of hybrid (solar-wind) energy system using HOMER Pro. simulator. Przeglad Elektrotechniczny, 99(4). https://doi.org/10.15199/48.2023.04.31
[20] Jauch, C., Cronin, T., Sørensen, P., Jensen, B.B. (2007). A fuzzy logic pitch angle controller for power system stabilization. Wind Energy: An International Journal for Progress and Applications in Wind Power Conversion Technology, 10(1): 19-30. https://doi.org/10.1002/we.205
[21] Zamzoum, O., Derouich, A., Motahhir, S., El Mourabit, Y., El Ghzizal, A. (2020). Performance analysis of a robust adaptive fuzzy logic controller for wind turbine power limitation. Journal of Cleaner Production, 265: 121659. https://doi.org/10.1016/j.jclepro.2020.121659
[22] Chavero-Navarrete, E., Trejo-Perea, M., Jáuregui-Correa, J.C., Carrillo-Serrano, R.V., Ronquillo-Lomeli, G., Ríos-Moreno, J.G. (2020). Hierarchical pitch control for small wind turbines based on fuzzy logic and anticipated wind speed measurement. Applied Sciences, 10(13): 4592. https://doi.org/10.3390/app10134592
[23] Van, T.L., Nguyen, T.H., Lee, D.C. (2015). Advanced pitch angle control based on fuzzy logic for variable-speed wind turbine systems. IEEE Transactions on Energy Conversion, 30(2): 578-587. https://doi.org/10.1109/TEC.2014.2379293
[24] Horiuchi, N., Kawahito, T. (2001). Torque and power limitations of variable speed wind turbines using pitch control and generator power control. In 2001 Power Engineering Society Summer Meeting. Conference Proceedings (Cat. No. 01CH37262), 1: 638-643. https://doi.org/10.1109/PESS.2001.970113
[25] Mohammed A., Fawaz S., Bashar M. (2023). Modeling and simulation of 1.5 MW wind turbine. International Journal of Applied Engineering, 13(10).