Muhamad Azhar Abdilatef Alobaidy*![]() | Saad Zaghlul Saeed
| Saad Zaghlul Saeed![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The artificial neural network (ANN) technique, one of the most sophisticated and advanced technologies of the present day, is leveraged across various fields due to its precision and superior performance. One such field that significantly relies on ANN is the detection of errors and classification of signals, especially in non-linear dynamic systems such as robotic systems. Mechanical and electrical faults at the robot's joints often manifest as disturbances, causing vibration at the robot arm's tip. This paper explores the offline detection and diagnosis of these tip acceleration values using eight levels of discrete wavelet transform (DWT). The output from the DWT serves as the input for the signal classification process. A comparative analysis between two neural network types, multi-layer perceptron and the Jordan recurrent neural network, is undertaken to achieve signal classification. Signals from various non-healthy scenarios, along with the healthy case, are utilized to train the neural networks. The errors under consideration occur either individually at the robot's joints or at different joints simultaneously. The results indicate that, when applied to the same set of offline recorded data, the multi-layer perceptron neural network demonstrates 100% accuracy, while the Jordan recurrent neural network achieves 97% accuracy in data classification. Thus, for error classification in the robot arm, the multi-layer perceptron neural network outperforms the Jordan neural network.
error detection, classification, robot, Jordan, MLP-NN, DWT, RNN, signal
It is commonly known that the employment of Automated manufacturing processes may be made more productive, higher-quality, and safer by integrating industrial robots. The entire production line may be stopped by an unexpected robot halt for a variety of reasons, which would reduce productivity and cost. Eski et al. [1] submitted a paper in 2011 that included experimental research on a robot manipulator model using neural networks, to assess the errors, which is appeared as a vibration state in joints. Using predetermined trajectory end-effectors, alternate joint speeds for robot manipulator joints were first examined. In addition, vibration and noise were measured at each joint. The linked metrics and a neural network predictor were then used to forecast the service period. In that experiment, the redial based and the self-organizing mapped neural networks were examined. The two proposed method (RBNN, and SOMNN) were compared with each other. Both of these two methods were considered as feed forward neural networks. The outcomes of two methods made it possible to use a Radial Based Neural Network type to anticipate vibrations on industrial robots. In 2012, Capisani [2] suggested an errors detection technique for a robot manipulator. The method used was called model-based fault diagnostics (FD). The FD technique can be used to identify potential faults on specific system components. Higher order sliding-mode unknown input observers were suggested as a means of supplying the required analytical redundancy for the detection of actuator problems. Instead, a generic observer technique was utilized to detect sensor problems. The so-called super twisting and the suboptimal second-order sliding-mode techniques were used to create the observer input rules. Both input law typologies were capable of enabling a successful FD. The method was tested experimentally on a COMAU SMART3-S2 robot manipulator and in simulation. The proposed method was applied for both the actuators and sensors of the examined robot arm. Different error detection techniques were not compared in this work. Most previous research on keeping track of the health of industrial robots has concentrated on a few problems, including backlash in gears, but hasn't incorporated diagnostics for the other gear and bearing issues [3]. Jaber and Bicker [4] published research on the creation of an intelligent condition monitoring system in 2016 that uses vibration signal analysis to find the most frequent difficulties that might arise in the bearings of industrial robot joints, such as inner/outer race bearing problems. The fault-related information deemed to be most crucial for precise fault diagnosis was found via time-frequency signal analysis based on the discrete wavelet transform (DWT). Then, for fault classification, the Multi-Layer Perceptron-ANN (MLP-NN) was employed. Using a PUMA 560 robot, vibration data were recorded from the machine. Then, signals were split up into multiple bands of frequencies, going from higher to lower frequencies, using the eight levels Daubechies wavelet transform. The created method had a high degree of dependability when it came to identifying the robot's various ingrained problems. With no comparison to other types of error detection systems, this study only examined the classification accuracy for one particular type. Model uncertainties and parameter fluctuations, were explicitly examined and dealt with as limited errors in this research of a class of linear systems with fault-related parameters. To rigorously, transmit limited uncertainty, a technique for ellipsoid bounding set-membership identification was proposed. Collection of non-healthy parameters those are assured to be practical and encompass genuine parameter values was provided by comparing the parameter sets that were collected throughout the identification procedure, predicted and observed flaws could be found [5]. In this study, categorization is accomplished using only one strategy, without comparison. Recurrent wavelet Elman neural network (RWENN) was developed recently by Lin and Boldbaatar [6] as part of a model-based fault accommodation control strategy to manage biped robot locomotion with unknown uncertainties and errors without sacrificing performance. A measured torque control served as the major control in the fault accommodation system and was utilized to maintain the ideal trajectory in the absence of a problem. The unknown model mistakes were then eliminated using a compensating control. RWENN has an output recurrent layer to the hidden layer and an input context layer with self-feedback, which improves the network's accuracy and convergence time compared to recurrent wavelet networks and recurrent neural networks. Elman RNN and the RWENN were contrasted in this study. This comparison demonstrates that the Elman RNN technique, in contrast to the RWENN, does not fully recover the performance until the second flaw in the tested robot manifests itself. Therefore, any dynamic change, like a flaw in the system, may be estimated precisely. It could make it easier to tolerate imperfections. Kamel et al. [7] released updated research on fault-tolerant cooperative control (FTCC) methods for multiple differentially driven autonomous wheeled mobile robots (WMRs) in the presence of actuator defects during formation operation in 2018. To prevent collisions between the healthy and flawed robots, a mechanical impedance-based method has been put out. A distributed control algorithm and the leader-follower approach were both employed to create the robot team. In general, the relevance of defect detection is increasing [8]. These flaws may have been present in the hardware or software of the robot system, respectively. It was recommended to employ the neural network within the approaches that were previously used to classify system failures more effectively. For the purpose of classification, the neural networks, which have many types and techniques, are mostly used. Usually, the feed forward methods are dependent. In many recent studies, the Elman recurrent neural network was used, but no studies were presented about using the Jordan recurrent neural network for the purpose of Errors classification in the field of robotics. In addition, no comparative studies have done between the Jordan RNN and a feed forward NN. In this study, the acceleration signals of multiple joints robot arm system are recorded from various cases; these signals are then detected and diagnosed offline using discrete wavelet transform (DWT). During the process of classification, the NN receives the inputs from DWT, while the outputs are represented as classifications (healthy or non-healthy with the location of errors). The MLP-NN is utilized as a feed forward type, and the Jordan RNN is used as a recurrent type. These two kinds are compared based on how well they classify data according to the time and the accuracy.
A nonplanar robot arm, which has three degrees of freedom, is simulated. The Error Signal is represented by adding disturbance to the joints' angle of the robot. The disturbed joint affect the tip trajectory and causes oscillations. In the simulation, the disturbance is generated by using disturbance block. The errors are supposed to happen at the robot's joints individually or in different joints at the same time. The tip's accelerations are recorded and used as inputs for the discrete wavelet transform to extract the features. Then the extracted features are used as inputs to the neural networks for the classification process. Several artificial neural network applications, including error detection of non-linear dynamic systems, have been successfully realized. This sort of technology is more popular since it produces precise and excellent outcomes. The discipline of error detection, especially for robotics systems, has evolved into one of those domains based on NN. The ability of ANN to draw lessons from prior experiences, compare current non-healthy information to prior knowledge, and make improvements in light of prior values [9-13] is one of its strongest traits. The feedforward neural network and the recurrent neural network are the two primary forms of neural networks in general. Numerous strategies, algorithms, and procedures have been introduced in recent years. The perceptron, backpropagation, and multi-layer perceptron (MLP) were the feedforward types that were utilized the most for classification [14]. Elman and Jordan’s neural networks were the most well-known recurrent neural networks. As mentioned, the Jordan RNN was not examined before for the purpose of classification, especially in error detections and the robotic fields. In this comparative study, the MLP-NN and Jordan RNN (JNN) were examined and compared using the same data set (tip acceleration signals of a robot arm).
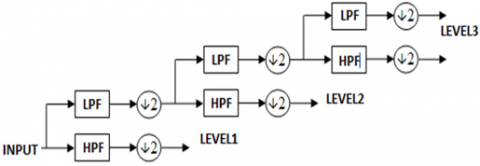
The discrete wavelet transform (DWT) is the type of wavelet transform for which each wavelet is independently sampled. As with other wavelet transformations (placement in time), it captures both frequency and position information, which is a considerable advantage over Fourier transforms. Spatial and transform are the two primary working domains in signal processing. The transform domain applies to working with frequency, whereas the spatial domain applies to dealing with pixels directly [15]. A few examples of transformations are the discrete wavelet transform (DWT), discrete cosine transform (DCT), discrete fourier transform (DFT), and fast fourier transform (FFT). DWT outperforms other transforms in a variety of transform techniques [15, 16], because it can capture frequency, location, and multi-resolution data. DWT comes in a variety of forms. The two most significant ones among them are the Haar and the Daubechies wavelet. When employing the DWT, which incorporates both LPF and HPF, it is referred to as level each time. (Figure 1 shows the three levels of DWT). Although that the complexity becomes more whenever the number of levels increases, the accuracy is better. In many recent studies, DWT with eight levels is used [4], thus 8-levels DWT is depended also in this study, for the purpose of feature extraction.
Figure 1. DWT with three levels
In this study, non-planar robot arm simulation is designed and built. It has three joints as shown in Figure 2. The configuration of this designed robot arm is essentially focused on the links of this arm, the links’ lengths of this robot arm are: L1 = 6m, and L2=5m, respectively.
Figure 2. Non-planar robot arm
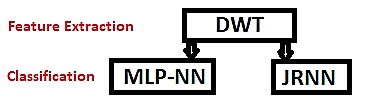
A circular path is considered as a desired trajectory for the arm. This circular trajectory is achieved by using sinusoidal functions for the joints' angle. In this study, disturbance signals are added to the joints (1, 2, and 3) during the robot arm simulation. During the signal recording, when the gain value of this disturbance block equals zero, that can be considered as an indication to a healthy joint in the robot arm. The signals are considered to be non-healthy if the gain of the disturbance block is not zero. The discrete wavelet transform (DWT) is used in this paper as a feature extraction method [17, 18] representing the first error diagnosis stage. 8-level of DWT is dependent [19]. The second stage which is more important one is the classification stage. In this paper two types of neural networks techniques are applied and examined as shown in Figure 3, the MLP-NN, and the JRNN [20-23].
Figure 3. Feature extraction and classification of data
Whenever the simulation was running, the tip's acceleration signals were recorded for various cases. Each of these signals, includes 2004 samples, recorded over two minutes (120 seconds). The signal is considered non-healthy in one or more of the three joints of the robot at a time. Thus, the final output cases must be eight as shown in Table 1.
Table 1. Three joints robot arm errors classification
|
Case No. |
Non-Healthy Joints |
Healthy Joints |
|
1 |
---- |
1,2,3 |
|
2 |
1 |
2,3 |
|
3 |
2 |
1,3 |
|
4 |
3 |
1,2 |
|
5 |
1,2 |
3 |
|
6 |
1,3 |
2 |
|
7 |
2,3 |
1 |
|
8 |
1,2,3 |
----- |
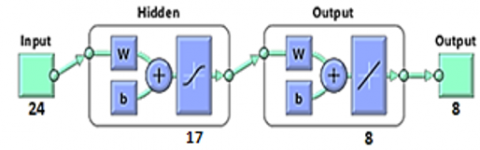
The signals are modified (detected and diagnosed) offline, using eight levels of DWT. The used 8-level DWT outputs twenty four (24) signals (8 for each of the three acceleration components). These outputs were then depended as inputs for the NN. The 24 resulting signals (NN inputs) were then classified and separated into eight groups (outputs), as illustrated in Figure 4. All of the work is carried out using Matlab 2020, which is loaded on a Lenovo laptop with an Intel (R) Core (TM) i5-3210 M CPU running at 2.50 GHz, 8 GB of RAM, and Windows 10 pro.
(a) MLP feed-forward neural network
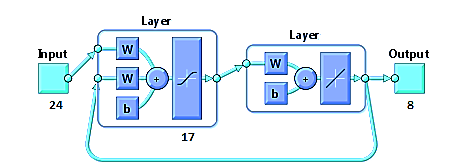
(b) Jordan recurrent neural network
Figure 4. Neural networks used for classification
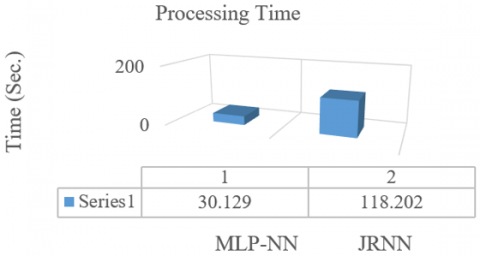
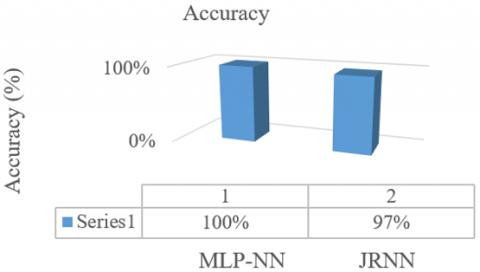
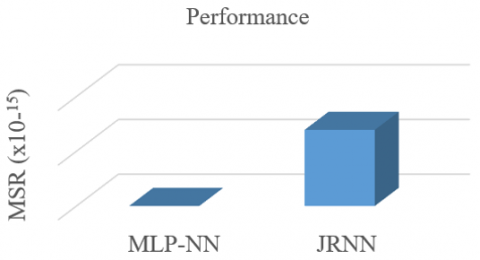
Referring to Table 1, the recorded acceleration signals may be non-healthy according to their referred joints cases: joint 1, joint 2, joint 3, two of them ((1,2), (2,3), (1,3)), and finally all of them are non-healthy (1, 2, and 3). The healthy joints’ case referred to the fact that all the recorded acceleration signals were healthy. The recorded data set in this study is divided into two groups, 70% for training and 30% for testing. Mean Square Error (MSE) is a metric used to assess how well the classification system in use is doing. Both of the classification algorithms under consideration depend on the sigmoid activation function [24-27]. According to the obtained results, the classification accuracy by using the MLP-NN reached 100%, while it reached 97% when the JRNN was used. The processing time when using the MLP-NN equals (30.129 sec.), while it equals (118.202 sec.) when the JRNN is dependent. This means that the MLP-NN can complete the work in just 30% of the time that is needed to complete the work by the JRNN. In addition, the performance which is measured using the mean squared error (MSR) equals (7.59102 x10-15) when the MLP-NN is dependent, while it equals (1.39010 x10-5) when the JRNN is dependent. All the details of the classification-depended methods (MLP-NN, and JRNN) are shown in Table 2, and Figure 5.
Table 2. Details of both MLP-ANN and JRNN
|
|
Network Properties |
MLP-ANN |
JRNN |
|
1 |
No. of neurons in the input layer |
24 |
24 |
|
2 |
No. of neurons in the hidden layer |
17 |
17 |
|
3 |
No. of neurons in the output layer |
8 |
8 |
|
4 |
How many levels are hidden? |
1 |
1 |
|
5 |
Function for activating hidden layers |
Sigmoid |
Sigmoid |
|
6 |
Function for activating the output layer |
Linear |
Linear |
|
8 |
Learner progress |
0.05 |
0.05 |
|
9 |
Least-squares performance gradient |
1.00x10-7 |
1.00x10-4 |
|
10 |
The most training epochs possible |
5000 |
5000 |
|
11 |
Mean Square Error (MSE) as Performance |
7.59102x10-15 |
1.39010x10-5 |
|
12 |
Total processing time |
30.129 sec. |
118.202 sec. |
|
13 |
Required number of iterations |
12 |
160 |
|
14 |
Accuracy |
100% |
97% |
Figure 5. Comparison results between MLP-NN and JRNN
Many types of recurrent neural network in addition to the Jordan neural network, can be examined and compared with each other when used for the purpose of classification, then compared with more than one type of the feedforward neural networks. The Elman method as a recurrent neural network and the backpropagation neural network are suggested to be compared beside the JRNN and the MLP-NN. These suggested techniques have to be examined offline and then online during the data set production. The performance of these neural networks for both online and offline processes have to be compared.
Errors detection is a crucial area to concentrate on and conduct extensive research on. Errors in the robot arm's joints cause disruption in the arm's overall trajectory. Errors can occur at various joints in various circumstances. According to the obtained results of the designed simulations, the neural networks detect the non-healthy joint(s) when errors happened at a time in different joints in the arm. The capability of errors classification is different between the multi-layer perceptron neural network and Jordan recurrent neural network. As a result, when two types of neural networks are applied for the same data and environment, the multi-layer perceptron neural network provides 100% accuracy, while the Jordan recurrent neural network provides 97% accuracy in classifying data. According to that, it can be said that the feed forward network can give better results when applied to a dynamic system when the classification happens offline. The combination of DWT and MLP-NN is recommended to be used for errors detection especially in robotics systems due to its smaller number of iterations and fast processing time.
For their contributions to this study, the staff of the University of Mosul, College of Engineering, especially those in the Mechatronics engineering department, are to be acknowledged.
[1] Eski, I., Erkaya, S., Savas, S., Yildirim, S. (2011). Fault detection on robot manipulators using artificial neural networks. Journal of Robotics and Computer-Integrated Manufacturing, 27(1): 115-123. http://doi.org/10.1016/j.rcim.2010.06.017
[2] Capisani, L.M., Ferrara, A., de Loza, A.F., Fridman, L.M. (2012). Manipulator fault diagnosis via higher order sliding-mode observers. IEEE Transactions on Industrial Electronics, 59(10): 3979-3986. http://doi.org/10.1109/TIE.2012.2189534
[3] Gómez-de-Gabriel, J.M., Mandow, A., Fernández-Lozano, J., García-Cerezo, A. (2013). Mobile robot lab project to introduce engineering students to fault diagnosis in mechatronic systems. IEEE Transactions on Education, 58(3): 187-193. http://doi.org/10.1109/TE.2014.2358551
[4] Jaber, A.A., & Bicker, R. (2014, October). A simulation of non-stationary signal analysis using wavelet transform based on LabVIEW and Matlab. In 2014 European Modelling Symposium (pp. 138-144). IEEE. https://doi.org/10.36001/ijphm.2016.v7i2.2365
[5] Zhou, B., Qian, K., Ma, X., Dai, X. (2017). Ellipsoidal bounding set-membership identification approach for robust fault diagnosis with application to mobile robots. Journal of Systems Engineering and Electronics, 28(5): 986-995. http://doi.org/10.21629/JSEE.2017.05.17
[6] Lin, C., Boldbaatar, E. (2015). Fault accommodation control for a biped robot using a recurrent wavelet Elman neural network. IEEE System Journal, 11(4): 2882-2893. http://doi.org/10.1109/JSYST.2015.2409888
[7] Kamel, M.A., Yu, X., Zhang, Y. (2018). Fault-tolerant cooperative control design of multiple wheeled mobile robots. IEEE Transactions on Control Systems Technology, 26(2): 756-764. http://doi.org/10.1109/TCST.2017.2679066
[8] Visinsky, M.L., Cavallaro, J.R., Walker, I.D. (1995). A dynamic fault tolerance framework for remote robots. IEEE Transactions on Robotics and Automation, 11(4): 477-490. http://doi.org/10.1109/70.406930
[9] Patton, R.J., Uppal, F.J., Lopez-Toribio, C.J. (2000). Soft computing approaches to fault diagnosis for dynamic systems: A survey. IFAC Fault Detection, Supervision and Safety for Technical Processes. Budapest, Hungary, 33(11): 303-315. http://doi.org/10.1016/S1474-6670(17)37377-9
[10] de Bruin, T., Verbert, K., Babuška, R. (2017). Railway track circuit fault diagnosis using recurrent neural networks. IEEE Transactions on Neural Networks and Learning Systems, 28(3): 523-533. http://doi.org/10.1109/TNNLS.2016.2551940
[11] Yan, Q., Wang, M., Jin, X., Wang, D. (2018). Data-driven human-robot coordination based walking state monitoring with cane-type robot. IEEE Access, 6: 8896-8908. http://doi.org/10.1109/ACCESS.2018.2806563
[12] Jin, X.Z., Zhao, Y.X., Wang, H., Zhao, Z., Dong, X.P. (2019). Adaptive fault-tolerant control of mobile robots with actuator faults and unknown parameters. IET Control Theory & Applications, 13(11): 1665-1672. http://doi.org/10.1049/iet-cta.2018.5492
[13] Li, X., Zhang, Y., Wang, M., Jin, X., Wang, D. (2018). Fault tolerant controled method of robotic arm based on machine vision. In Proceedings of the 30th Chinese Control and Decision Conference (CCDC), Shenyang, China, pp. 484-489. http://doi.org/10.1109/CCDC.2018.8407181
[14] Jaber, A., Bicker, R. (2014). Industrial robot fault detection based on wavelet transform and LabVIEW. In First International Conference on Systems Informatics, Modelling and Simulation. http://doi.org/10.1109/SIMS.2014.27
[15] Kumar, G., Brar, E.S., Kumar, R., Kumar, A. (2015). A review: DWT-DCT technique and arithmetic-Huffman coding based image compression. International Journal of Engineering and Manufacturing, 5(3): 20. http://doi.org/10.5815/ijem.2015.03.03
[16] Roy, V., Shukla, S. (2013). Spatial and transform domain filtering method for image de-noising: A review. International Journal of Modern Education and Computer Science, 5(7): 41-49. http://doi.org/10.5815/ijmecs.2013.07.05
[17] Jaber, A.A., Bicker, R. (2016). Fault diagnosis of industrial robot gears based on discrete wavelet transform and artificial neural network. Insight-Non-Destructive Testing and Condition Monitoring, 58(4): 179-186. http://doi.org/10.5815/ijmecs.2013.07.05
[18] Alobaidy, M.A.A., Abdul-Jabbar, J.M., Al-khayyt, S.Z. (2022). Slantlet transform used for faults diagnosis in robot arm. Indonesian Journal of Electrical Engineering and Computer Science, 25(1): 281-290. http://doi.org/10.11591/ijeecs.v25.i1
[19] Jaber, A.A., Bicker, R. (2016). Fault diagnosis of industrial robot gears based on discrete wavelet transform and artificial neural network. Insight-Non-Destructive Testing and Condition Monitoring, 58(4): 79-186. https://doi.org/10.1784/insi.2016.58.4.179
[20] Xu, T., Wang, H., Liu, Z., Hao, Y. (2020). Machinery fault diagnosis using recurrent neural network: A review. 2020 Global Reliability and Prognostics and Health Management (PHM-Shanghai), Shanghai, China, pp. 1-6. https://doi.org/10.1109/PHM-Shanghai49105.2020.9280936
[21] Shahnazari, H. (2020). Fault diagnosis of nonlinear systems using recurrent neural networks. Chemical Engineering Research and Design, 153: 233-245. http://doi.org/10.1016/j.cherd.2019.09.026
[22] Sun, W., Paiva, A.R., Xu, P., Sundaram, A., Braatz, R.D. (2020). Fault detection and identification using Bayesian recurrent neural networks. Computers & Chemical Engineering, 141: 106991. http://doi.org/10.1016/j.compchemeng.2020.106991
[23] Cui, Y., Bangalore, P., Bertling Tjernberg, L. (2021). A fault detection framework using recurrent neural networks for condition monitoring of wind turbines. Wind Energy, 24(11): 1249-1262. http://doi.org/10.1002/we.2628
[24] Chen, Y.Q., Fink, O. and Sansavini, G. (2017). Combined fault location and classification for power transmission lines fault diagnosis with integrated feature extraction. IEEE Transactions on Industrial Electronics, 65(1): 561-569. http://doi.org/10.1109/TIE.2017.2721922
[25] Wang, X., Qin, Y., Wang, Y., Xiang, S., Chen, H. (2019). ReLTanh: An activation function with vanishing gradient resistance for SAE-based DNNs and its application to rotating machinery fault diagnosis. Neurocomputing, 363: 88-98. http://doi.org/10.1016/j.neucom.2019.07.017
[26] Qin, Y., Wang, X., Zou, J. (2018). The optimized deep belief networks with improved logistic sigmoid units and their application in fault diagnosis for planetary gearboxes of wind turbines. IEEE Transactions on Industrial Electronics, 66(5): 3814-3824. http://doi.org/10.1109/TIE.2018.2856205
[27] Kong, X., Mao, G., Wang, Q., Ma, H., Yang, W. (2020). A multi-ensemble method based on deep auto-encoders for fault diagnosis of rolling bearings. Measurement, 151: 107132. http://dx.doi.org/10.1016/j.measurement.2019.107132