Ihab F. Tayyeh* | Hazem I. Ali
© 2022 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Real world systems are inherently nonlinear in nature. Over the last few decades, nonlinear systems are regarded as the most significant issue in control theory. In this work, a nonlinear full state feedback H-infinity controller is proposed for nonlinear systems. The black hole optimization method (BHO) is used as an effective optimization technique to find the optimal parameters for the proposed controller based on the proposed cost function. The suggested controller gain matrix is computed by solving the H-infinity algebraic Riccati equation. As case studies, two types of nonlinear systems are demonstrated to demonstrate the utility of the proposed controller. Finally, simulation findings show that the suggested nonlinear controller improves the stability and performance of nonlinear systems by compensating them and compelling their states to track the reference input asymptotically with a workable and feasible control action.
nonlinear systems, H-infinity, state feedback, black hole optimization, robust control
Nonlinear systems are considered the most important topic in control theory over the last few decades. They are of great importance due to their applications in science and engineering [1]. Nonlinear phenomena typically represent a real-world system's behavior. Due to the significant uncertainty and nonlinearity of these systems, it is challenging to keep appropriate stability margins and required performance characteristics for closed-loop systems. So, a robust control methods are needed to design controllers for nonlinear systems that meeting the stabilization and required performance in facing the uncertainties and nonlinearities [2].
The most frequent and effective strategy in robust control theory for rejecting disturbances and compensating nonlinearities and uncertainties in the system is the H-infinity control. It provides a strong performance and stabilization [3-6]. The development of robust feedback controllers is a key challenge in control theory. Tracking asymptotically and robustness despite system disturbances and uncertainties care tasks that such controllers may undertake [7]. The feedback control theory entails numerous feedback structure choices and multiple feedback loops. A state feedback control is a kind of feedback control in which all of the system states be available for feedback [8].
Previous research has focused on a variety of design strategies for robust feedback control, like the design of H-infinity state feedback control depending on the model that is nearly linearized [9, 10], the robust feedback linearization for nonlinear processes control based on Lyapunove theory [11], H-infinity loop-shaping approach [12, 13], a robust control method on the basis of linear and bilinear matrix inequalities, (LMIs)&(BMIs) [14, 15].
All of the studies mentioned above presented relatively complex algorithm for designing a controller for nonlinear systems and are specific to the type of system, this is what prompted us to do this study, which suggests simple and more general algorithm.
In this paper, a full state feedback H-infinity controller is designed to stabilize the nonlinear systems and satisfy a desirable performance. The Black Hole optimization (BHO) method is employed to obtain the optimum parameters for the suggested nonlinear controller. The proposed controller design in this paper can effectively compensate the nonlinear systems with constant coefficients.
The structure of the paper is as follows: in “BLACK HOLE OPTIMIZATION (BHO)” section the optimization method (BHO) is explained. In “CONTROLLER DESIGN” section the formulation of the full state feedback H∞ nonlinear control problem for the nonlinear system is provided. In “CONTROLLER PARAMETERS TUNING” section the parameters of the proposed controller that will be tuned by the BHO to obtaining the optimal values for them were reviewed. In “ILLUSTRATIVE EXAMPLES” section two kinds of nonlinear systems are presented as case studies to demonstrate the effectiveness of the proposed controller. In “CONCLUSION” section concluding remarks are stated.
The BHO is one of the most recently developed optimization methods that is used to identify the best solution of a combinatorial optimization issue with great success [16]. It categorized as metaheuristic (population – based) optimization algorithm which use a specific trade-off between randomization and local search in order to obtain ideal or as near to optimal as possible solution [17]. Local search is a common strategy for detecting the high quality solutions to complicated or difficult combinatorial optimization problems in credible length of time. And it is an iterative search method to variegation of neighbour of solutions seeking to improve on present solutions [16, 18].
In this work, we will use this method to make tune some of the important parameters in the process of designing the controller for a nonlinear system and thus to get the best values for those parameters that achieve the best stability and performance.
In this algorithm, the population of potential solutions (stars) is created at random from the points located within the search space. After initialization, the population's fitness values are evaluated, and the best candidate (with the highest fitness value) is selected to be the black hole, while the other stars form the normal stars. Subsequently, the black hole starts attracting stars around it and they moving towards the black hole [16-19]. The movement formal of stars towards black hole is formulated as [17, 19]:
$x_i(t+1)=x_i(t)+\operatorname{rand} *\left(x_{B H}-x_i(t)\right)\\
i=1,2,3, \ldots, \mathrm{N}$ (1)
where, xi(t+1) and xi(t) are the ith star’s locations at iteration (t+1) and (t) respectively. (rand) is a number generated at random between 0 and 1. XBH denotes the position of the black hole in the search space. (N) is the number of possible solution (stars).
A star moving towards the black hole and takes new position, if its fitness value is better than the black hole value, the star is chosen to be the black hole. The process is then repeated with the black hole in its new position, and stars begin to move towards this new black hole. Furthermore, when traveling stars near a black hole, there is a chance that they will pass the event horizon. Any candidate solution (star) that crosses the black hole's event horizon will be swallowed by the black hole. Then a new star following the swallowed one is created and distributed randomly in the search space. The purpose of this creation is to keep a consistent number of candidate solutions. After all of the stars have been moved, the next iteration begins [17]. The event horizon radius (R) is formulated as follows [17-19]:
$R=\frac{f_{B H}}{\sum_{i=1}^N f_i}$ (2)
where, fBH is the black hole's fitness value and N is the number of possible solutions (stars) and fi is the fitness value of ith star. When the distance between a star and a black hole is smaller than a certain radius (R), the black hole has swallowed this star.
There are two advantages to using the black hole optimization procedure. For starters, it features a straightforward structure that is simple to apply. Second, there are no complications with parameter adjustment. Finally, when the maximum number of iterations has been reached or a satisfactory solution has been found, the work is stopped [16].
In this section, the design procedure of the proposed controller for the systems that have the form [20, 21]:
$\dot{x}=A x+B_1 d(t)+B_2 u(t)\\
e(t)=C_1 x+D_{12} u(t)\\
y=C_2 x$ (3)
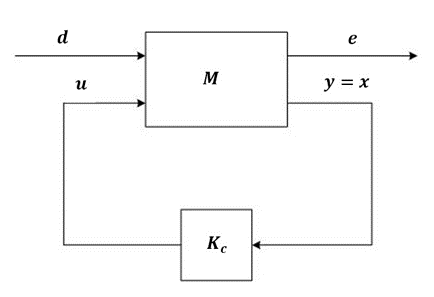
where, $x \in \mathcal{R}^n$ is the system state, $d(t) \in \mathcal{R}^m$ is the exogenous disturbance, $u(t) \in \mathcal{R}^l$ is the control input, $e(t) \in \mathcal{R}^q$ is the controlled output, $y \in \mathcal{R}^p$ is the measured output, which is the state vector, assumed to be available for feedback, $A \in \mathcal{R}^{n \times n}$, $B_1 \in \mathcal{R}^{n \times m}$ and $B_2 \in \mathcal{R}^{n \times l}$, $C_1 \in \mathcal{R}^{q \times n}$ is a weight matrix of the system state control, $D_{12} \in \mathcal{R}^{q \times l}$ is a weight matrix of control input regulation, $C_2 \in \mathcal{R}^{p \times n}$ is the output weight matrix.
The standard configuration of the full state feedback H-infinity control is as shown in Figure 1, where M represents the augmented plant matrix [21]:
$M=\left[\begin{array}{ccc}A & B_1 & B_2 \\ C_1 & D_{11} & D_{12} \\ C_2 & D_{21} & D_{22}\end{array}\right]$ (4)
Figure 1. Full state feedback H-infinity control structure
As we need to design a full state feedback H-infinity control, all system states must be available for feedback. This implies that C2=I.D11, D21 and D22=0. So the augmented plant matrix M becomes:
$M=\left[\begin{array}{ccc}A & B_1 & B_2 \\ C_1 & 0 & D_{12} \\ I & 0 & 0\end{array}\right]$ (5)
The following assumptions are required for the proposed controller's design:
(1) The pairs (A, B1) and (A, B2) are stabilizable.
(2) The pair (C1, A) is detectable.
(3) $C_1^T D_{12}=0$ and $D_{12}^T D_{12}=I$.
It is worth to mention that to control a nonlinear system in this procedure, it should be converted to the configuration shown in Eq. (3) using a state variable transformation method. This transformation makes the nonlinear terms and uncertainties (bad terms) arranged in the same channel in which the control law $u$ affects (satisfying the matching condition). In this case the controller can compensate the bad terms. The appropriate transformation for this object is the diffeomorphism mapping: $T: \mathcal{D} \rightarrow \mathcal{R}^n$ which transforms the system from x-space to z-space [22].
$\mathrm{z}=T(x)$ (6)
The map T must be invertible, such that
$x=T^{-1}(z)$ (7)
The transformed system’s origin point in z-space is the same as the original system [22]:
T(0)=0 (8)
This mapping converts the nonlinear system to the following structure [8]:
$\dot{z}=A z+B_1 d(t)+B_2 u(t)$ (9)
The control problem is to find the optimal control law u*, which is a function of states, that makes the system internally stable by ensuring the infinite norm of the closed-loop transfer function (Ted) which should be less than a given value of γ as [20]:
$\left\|T_{e d}(s)\right\|_{\infty}<\gamma$ (10)
where, γ represents the upper bound in the disturbance and uncertainty magnitude that can be exterminated by the control signal. The condition in Eq. (10) implies that [21]:
$\begin{array}{rr}\text { inf } & \sup \\ u & d\end{array}(u, d)<\infty$ (11)
where
$J(u, d)=\int_0^{\infty}\left(e^T e-\gamma^2 d^T d\right) d t$ (12)
The disturbance d(t) tries to maximize the cost function J(t) while the control signal u(t) tries to minimize it. Therefore, the physical meaning of this relation is that the control signal and the disturbance compete to each other within infimum (inf) and supremum (sup).
Let the optimal control and worst-case disturbance have the following structure [19]:
$d(t)=K_d x(t)$ (13)
and
$u(t)=K_c x(t)$ (14)
Substituting Eq. (14) in Eq. (3), yields:
$e(t)=\left(C_1+D_{12} k_c\right) x(t)$ (15)
Using assumption 3 gives:
$e^T e=\boldsymbol{X}^T\left(C_1^T C_1+K_c^T K_c\right) \boldsymbol{X}$ (16)
Therefore,
$J=\int_0^{\infty} x^T\left(C_1^T C_1+K_c^T K_c-\gamma^2 K_d^T K_d\right) x d t$ (17)
Substituting Eq. (15) and Eq. (16) in Eq. (3), yields:
$\dot{x}=\left(A+B_1 K_d+B_2 K_c\right) x$ (18)
With the performance index in Eq. (17), let:
$Q=\left(C_1^T C_1+K_c^T K_c-\gamma^2 K_d^T K_d\right)$ (19)
where, Q must be positive definite matrix. The system in Eq. (18) is assumed to be stable by this optimal control law. Under this assumption, let us set:
$V(x)=x^T P x$ (20)
$\dot{V}(x)=-x^T Q x$ (21)
where, V(x) is positive definite Lyapunov quadratic function. To find the optimal cost function, Eq. (19) will be substituted in Eq. (21) to get:
$\dot{V}(x)=-x^T\left(C_1^T C_1+K_c^T K_c-\gamma^2 K_d^T K_d\right) x$ (22)
$x^T\left(C_1^T C_1+K_c^T K_c-\gamma^2 K_d^T K_d\right) x=-\frac{d}{d t} x^T P x$ (23)
Integrating both sides of Eq. (23) from 0 to $\infty$ yields:
$\begin{aligned} \int_0^{\infty} x^T\left(C_1^T C_1+K_c^T\right.&\left.K_c-\gamma^2 K_d^T K_d\right) x d t=\int_0^{\infty}-\frac{d}{d t} x^T P x d t \end{aligned}$ (24)
$J=-x(\infty)^T P x(\infty)-\left(-x(0)^T P x(0)\right)$ (25)
Since the system in Eq. (18) must be stable by the control law, $x(\infty)=0$. Therefore, the optimal cost function is:
$J^*=-x(0)^T P x(0)$ (26)
The positive definite matrix P represents the solution of the following Lyapunov equation:
$\left(A+B_1 K_d+B_2 K_c\right)^T P+P\left(A+B_1 K_d+B_2 K_c\right)=-Q$ (27)
$\left(A+B_1 K_d+B_2 K_c\right)^T P+P\left(A+B_1 K_d+B_2 K_c\right)=-\left(C_1^T C_1+K_c^T K_c-\gamma^2 K_d^T K_d\right)$ (28)
$\left(A+B_1 K_d+B_2 K_c\right)^T P+P\left(A+B_1 K_d+B_2 K_c\right)+\left(C_1^T C_1+K_c^T K_c-\gamma^2 K_d^T K_d\right)=0$ (29)
Now, to find the optimal control law we must derive Eq. (29) w.r.t. Kc and make $\partial P / \partial K_{c_{i j}}=0$, we get:
$K_c=-B_2^T P$ (30)
As a result,
$u^*=K_c x=-B_2^T P x$ (31)
By the same way, we can find the applied worst-case disturbance by deriving the Lyapunov equation w.r.t. Kd and make $\partial P / \partial K_{d_{i j}}=0$, we get:
$K_d=\frac{1}{\gamma^2} B_1^T P$ (32)
and
$d^*=K_d x=\frac{1}{\gamma^2} B_1^T P x$ (33)
The Lyapunov equation at the optimal control case and worst-case disturbance is:
$P A+A^T P+C_1^T C_1-P\left(B_2 B_2^T-\frac{1}{\gamma^2} B_1 B_1^T\right) P=0$ (34)
This equation is known as the H-infinity algebraic riccati equation.
The condition $\left\|T_{e d}(s)\right\|_{\infty}<\gamma$ is satisfied and provided:
(1) $u^*=K_c x=-B_2^T P x$.
(2) P>0.
The matrix A+B1Kd+B2Kc is stable and implies that the matrix A+B2Kc is asymptotically stable.
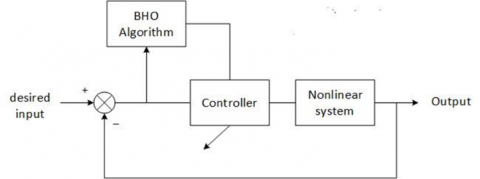
The BHO approach is utilized offline, an offline algorithm is provided all of the problem data from the start and is needed to generate a solution that addresses the problem at hand, to obtain the required parameters of the proposed controller. The BHO method is simple and it has been used to find the optimal values of the elements in matrix C1 (Eq. (3)) and the optimal value of γ (Eq. (34)) that satisfy the desired robust stability and performance. The Integral Square Error (ISE) was used as a performance index to ensure a desirable time response specifications. Figure 2 shows the block diagram of the proposed controller with BHO algorithm. The BHO problem is to find the optimal controller from the search space that minimizes the objective function (ISE) and satisfy Eq. (34). The parameters listed below were used to carry out the robust controller design using BHO:
(1) The members to be obtained are: c11, c12, …., cnn and γ;
(2) Population size is set to 50;
(3) Maximum iteration is set to 100.
Figure 2. Block diagram of the proposed controller using BHO
Two nonlinear system examples are offered in this section as case studies to demonstrate the usefulness of the proposed controller. The time responses of the nonlinear system without and with the proposed controller are presented to demonstrate the effectiveness of the proposed controller. In example 1, the matching condition is satisfied in the state equations of the nonlinear system (the nonlinear terms and the control law are located in the same channel). In example 2, the matching condition is not satisfied (the nonlinear terms and the control law are located in different channels).
5.1 Example 1
The nonlinear system to be controlled is:
$\dot{x}_1=x_2\\
\dot{x}_2=\sin x_1-u \cos x_1\\
y=x_1$ (35)
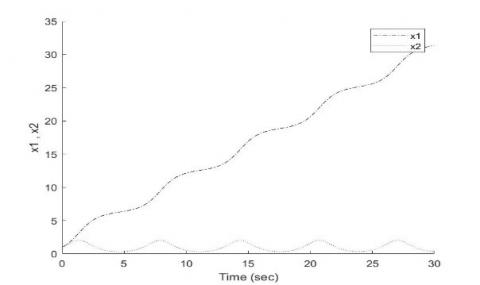
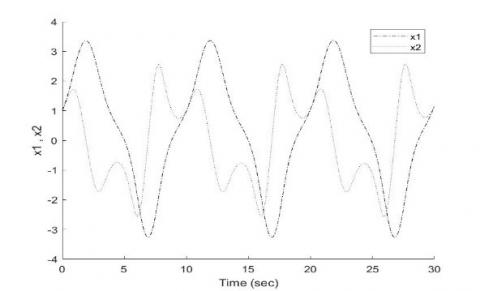
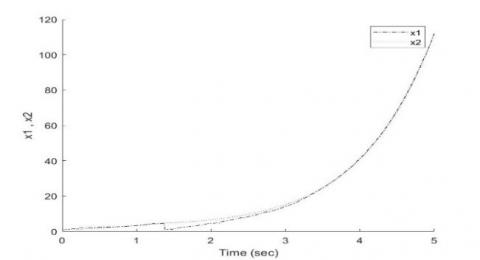
Figures 3 and 4 show the nonlinear system's open-loop and closed-loop time response properties before applying the proposed controller. It is clear that the system is unstable in open-loop and critical stable in closed loop, so it is necessary to design a controller to stabilize the system and achieve the required performance. For this system, there is no need to utilize the diffeomorphism mapping because all nonlinear terms are located in the same channel of control u (matching condition is satisfied). It is noted from system’s equation Eq. (35) that the coefficient of u is variable and nonlinear term of the state x1. Therefore, to make the system’s equation (Eq. (35)) in the standard controllable form as Eq. (3), the following steps are required:
$v=-u \cos x_1$ (36)
Figure 3. Time response for closed-loop system
Figure 4. Time response for open-loop system
where, υ represents the virtual linear state feedback controller, which is:
$v=K_C x=K_1 x_1+K_2 x_2$ (37)
Then the actual controller u is:
$u=-\frac{v}{\cos x_1}=-\frac{K_c x}{\cos x_1}=\frac{-K_1 x_1-K_2 x_2}{\cos x_1}$ (38)
The resulting system state equation is:
$\dot{x}(t)=\left[\begin{array}{ll}0 & 1 \\ 0 & 0\end{array}\right] x(t)+\left[\begin{array}{l}0 \\ 1\end{array}\right] d(t)+\left[\begin{array}{l}0 \\ 1\end{array}\right] v(t)$ (39)
where,
$d(t)=\sin x_1$ (40)
The BHO algorithm was then utilized to find the optimal control law. Table 1 displays the optimization settings for the BHO algorithm. As well as, Table 2 displays the optimal values and bounds of the optimized parameters.
Table 1. The settings of BHO algorithm (example 1)
|
Optimization settings |
Value |
|
Dimension of problem (number of parameters) |
5 |
|
Population size |
50 |
|
Number of iterations |
100 |
|
Number of runs |
1 |
Table 2. The optimized parameters' bounds and optimal values (example 1)
|
Optimized parameter |
Lower bound |
Upper bound |
Optimum value |
|
$\gamma$ $c_{11}$ $c_{12}$ $c_{21}$ $c_{22}$ |
1 0 0 0 0 |
10 100 100 100 100 |
1.1101 98.911 0.0001 0.0001 0.0001 |
Subsequently, the H-infinity algebraic equation (Eq. (34)) will be solved with the obtained optimal values to obtain the stabilizing positive definite matrix P as follows:
$P=10^3\left[\begin{array}{ll}2.1911 & 0.2400 \\ 0.2400 & 0.0526\end{array}\right]$ (41)
Then, the gain matrix of the state feedback controller has been determined using Eq. (30) as seen below:
$K_c=\left[\begin{array}{ll}-240.0397 & -52.5944\end{array}\right]$ (42)
Thus, the control law becomes:
$u=\frac{240.0397 x_1+52.5944 x_2}{\cos x_1}$ (43)
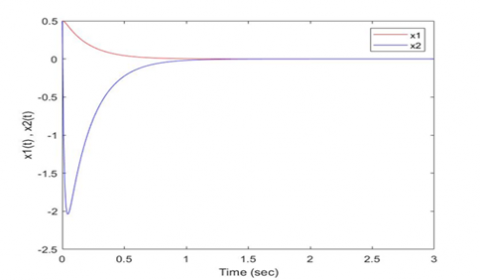
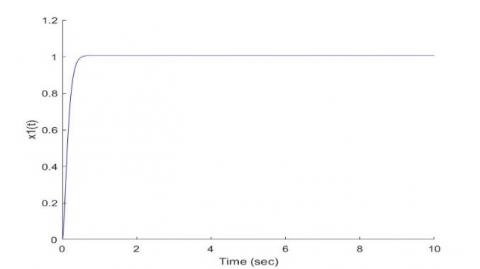
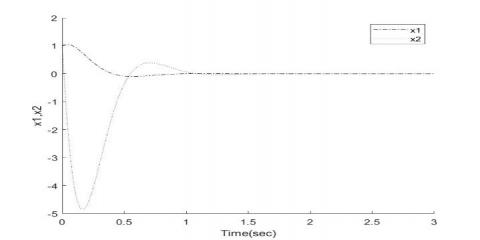
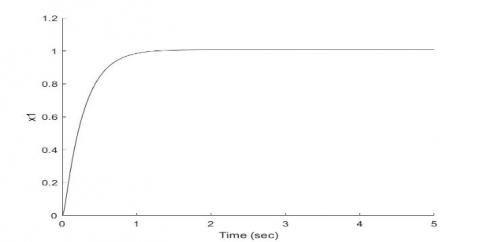
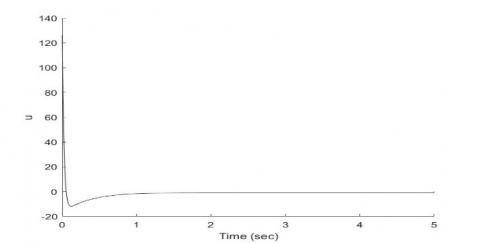
Figures 5 and 6 show the time response of the nonlinear system after applying the proposed controller to the system and achieving the stabilization and tracking for a unit step reference input. Figure 7 shows the behavior of the control signal. It is shown that the proposed controller can effectively stabilize the nonlinear system with a desirable performance.
Figure 5. Stabilization properties of nonlinear system states
Figure 6. Tracking properties
Figure 7. The resulting control action
5.2 Example 2
Consider the nonlinear system to be controlled:
$\dot{x}_1=\tan x_1+x_2\\
\dot{x}_2=x_1+u\\
y=x_1$ (44)
Figure 8. Time response for open-loop system
Figure 9. Time response for closed-loop system
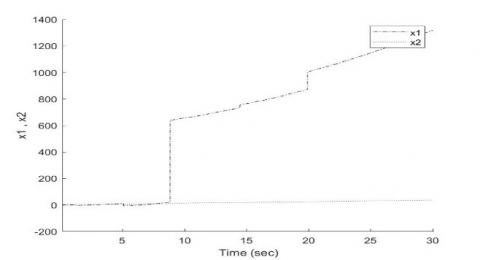
Figures 8 and 9 show the nonlinear system’s open-loop and closed-loop time response properties before applying the suggested controller.
It is clear that the system is unstable in open-loop and closed loop, so it is necessary to design a controller to stabilize the system and achieve the required performance. It is noticed that the nonlinear term (tanx1) isn’t located in the same channel that control signal u effects (matching condition not satisfied), so the diffeomorphism mapping of Eq. (6) is necessary to transform the nonlinear system into the standard controllable form as in Eq. (9). To carry out the mapping, the following state variable transformation will apply:
$z_1(t)=x_1(t), z_2(t)=\dot{z}_1(t)=\dot{x}_1(t)=\tan x_1+x_2$ (45)
Thus, the transformed state equation becomes:
$\dot{z}_1(t)=z_2(t)\\
\dot{z}_2(t)=z_1+d(t)+u(t)$ (46)
where, $d(t)=z_2 \sec ^2 z_1$.
Then the system in z-space becomes:
$\left[\begin{array}{l}\dot{z}_1(t) \\ \dot{z}_2(t)\end{array}\right]=\left[\begin{array}{ll}0 & 1 \\ 1 & 0\end{array}\right]\left[\begin{array}{l}z_1(t) \\ z_2(t)\end{array}\right]+\left[\begin{array}{l}0 \\ 1\end{array}\right] d(t)+\left[\begin{array}{l}0 \\ 1\end{array}\right] u(t)$ (47)
The BHO algorithm was then utilized to find the optimal control law. Table 3 shows the settings for optimization of the BHO algorithm. As well as, Table 4 shows the bounds of the optimized parameter and their optimal values.
Table 3. The settings of BHO algorithm (example 2)
|
Optimization settings |
Value |
|
Dimension of problem (number of parameters) Population size Number of iterations Number of runs |
5
50 200 1 |
Table 4. The optimized parameters' bounds and optimal values (example 2)
|
Optimized parameter |
Lower bound |
Upper bound |
Optimum value |
|
$\gamma$ $c_{11}$ $c_{12}$ $c_{21}$ $c_{22}$ |
1 0 0 0 0 |
10 100 100 100 100 |
1.001 51.011 0.0011 0.00011 0.00101 |
Subsequently, the H-infinity algebraic equation (Eq. (34)) will be solved with the obtained optimal values to obtain the stabilizing positive definite matrix P as follows:
$P=10^3\left[\begin{array}{cc}0.7943 & 0.1259 \\ 0.1259 & 0.038\end{array}\right]$ (48)
Then, the gain matrix of the state feedback controller has been determined using Eq. (30) as seen below:
$K_c=\left[\begin{array}{ll}-125.9200 & -38.0930\end{array}\right]$ (49)
Thus, the optimal control law in z-space becomes:
$u=-125.92 z_1-38.093 z_2$ (50)
Now, the control law will be converted from z-space to x-space:
$u=-125.92 x_1-38.093 \tan x_1-38.093 x_2$ (51)
Figures 10 and 11 show that the proposed controller was succussed in achieving stabilization and tracking performance, with minimum tracking error and rapid convergence to the reference line, for the nonlinear system despite the presence of disturbance. Figure 12 shows the behavior of the implemented control action which is admissible.
Figure 10. Stabilization properties of nonlinear system states
Figure 11. Tracking properties
Figure 12. The resulting control action
In this study, a new optimal nonlinear controller based on H-infinity technique is proposed for two types of nonlinear systems; the first one meet the matching condition between the control law and nonlinear terms (disturbances), and the second one did not meet this condition. The proposed controller design has proven the stability and the optimal tracking performance for the two cases. After using the proposed controller, the systems were asymptotically stable. The black hole optimization method was employed to obtain the optimal values of controller parameters. The contribution of this study is introducing a simple algorithm for design procedure of the proposed controller for a wide range of nonlinear systems, that means it is general algorithm, while the previous studies present a complex algorithm for the design and specific to type of nonlinear system. Finally, another controller design will be needed when the system coefficients are uncertain.
[1] Christos, K.V. (2017). Nonlinear Systems: Design, Applications and Analysis. SIAM.
[2] Ali, H.I. (2018). Swarm Intelligence to Robust Control Design. CreateSpace Independent Publishing Platform.
[3] Ali. H.I., Hadi, M.A. (2020). Optimal nonlinear controller design for different classes of nonlinear systems using black hole optimization method. Arabian Journal for Science and Engineering, 45(8): 7033-7053. https://doi.org/10.1007/s13369-020-04650-z
[4] Yadav, A.K., Pathak, P.K., Gaur, P. (2020). Robust control and stability analysis of computerized numeric controlled machine tool under parametric uncertainty. Journal Européen des Systèmes Automatisés, 53(5): 661-670. https://doi.org/10.18280/jesa.530509
[5] Ali, H.I., Abdulridha, A.J. (2018). H-infinity based full state feedback controller design for human swing leg. Engineering and Technology Journal, 36(3): 350-357. http://dx.doi.org/10.30684/etj.36.3A.15
[6] Ali, H.I., Mhmood, A.H. (2021). Nonlinear H-infinity model reference controller design. International Review of Automatic Control (IREACO), 14(1): 39-50. https://doi.org/10.15866/ireaco.v14i1.20301
[7] Thabet, A., Frej, G.B.H., Gasmi, N., Metoui, B. (2020). Real time stabilization of Lipschitz nonlinear systems with nonlinear output. Journal Européen des Systèmes Automatisés, 53(4): 493-498. https://doi.org/10.18280/jesa.530407
[8] Mhmood, A.H., Ali, H.I. (2021). Optimal H-infinity integral dynamic state feedback model reference controller design for nonlinear systems. Arabian Journal for Science and Engineering, 46(10): 10171-10184. https://doi.org/10.1007/s13369-021-05447-4
[9] Rigatos, G., Siano, P., Abbaszadeh, M., Ademi, S. (2017). Nonlinear H-infinity control for the rotary pendulum. 2017 11th International Workshop on Robot Motion and Control (RoMoCo), Wasowo Palace, Poland, pp. 217-222. https://doi.org/10.1109/RoMoCo.2017.8003916
[10] Rigatos, G., Siano, P. (2015). A new nonlinear H-infinity feedback control approach to the problem of autonomous robot navigation. Intelligent Industrial Systems, 1(3): 179-186. https://doi.org/10.1007/s40903-015-0021-x
[11] de Jesús Rubio, J. (2018). Robust feedback linearization for nonlinear processes control. ISA Transactions, 74: 155-164. https://doi.org/10.1016/j.isatra.2018.01.017
[12] Jones, B.L., Heins, P.H., Kerrigan, E.C., Morrison, J.F., Sharma, A.S. (2015). Modelling for robust feedback control of fluid flows. Journal of Fluid Mechanics, 769: 687-722. https://doi.org/10.1017/jfm.2015.84
[13] Flinois, T.L.B., Morgans, A.S. (2016). Feedback control of unstable flows: A direct modelling approach using the Eigensystem Realisation Algorithm. Journal of Fluid Mechanics, 793: 41-78. https://doi.org/10.1017/jfm.2016.111
[14] Gritli, H., Belghith, S. (2018). Robust feedback control of the underactuated Inertia Wheel Inverted Pendulum under parametric uncertainties and subject to external disturbances: LMI formulation. Journal of the Franklin Institute, 355(18): 9150-9191. https://doi.org/10.1016/j.jfranklin.2017.01.035
[15] Gritli, H. (2019). Robust master-slave synchronization of chaos in a one-sided 1-DoF impact mechanical oscillator subject to parametric uncertainties and disturbances. Mechanism and Machine Theory, 142: 103610. https://doi.org/10.1016/j.mechmachtheory.2019.103610
[16] Kumar, S., Datta, D., Singh, S.K. (2015). Black hole algorithm and its applications. In Computational Intelligence Applications in Modeling and Control, Springer, pp. 147-170. https://doi.org/10.1007/978-3-319-11017-2_7
[17] Farahmandian, M., Hatamlou, A. (2015). Solving optimization problems using black hole algorithm. Journal of Advanced Computer Science & Technology, 4(1): 68. http://dx.doi.org/10.14419/jacst.v4i1.4094
[18] Hatamlou, A. (2013). Black hole: A new heuristic optimization approach for data clustering. Inf Sci (N Y), 222: 175-184. https://doi.org/10.1016/j.ins.2012.08.023
[19] Ibrahim, I.H., Ali, H.I. (2021). Quantitative PID controller design using Black Hole optimization for ball and beam system. Iraqi Journal of Computers, Communications, Control and Systems Engineering, 21(3): 65-75. http://dx.doi.org/https://doi.org/10.33103/uot.ijccce.21.3.6
[20] Shareef, Z.M., Ali, H.I. (2018). Full state feedack H2 and H-infinity controllers design for a two wheeled inverted pendulum system. Engineering and Technology Journal, 36(10): 1110-1121. http://dx.doi.org/10.30684/etj.36.10A.12
[21] Sinha, A. (2007). Linear Systems: Optimal and Robust Control. CRC press of Taylor & Francis Group, New York.
[22] Khalil, H.K. (2002). Nonlinear Systems. 3rd Ed. Prentice Hall, Upper Saddle River, New Jersey.