Boudia Assam | Sabir Messalti* | Abdelghani Harrag
OPEN ACCESS
In this paper, new improved maximum power point tracking using combinedbackstepping -sliding mode has been designed and studied, it is very known that the sliding mode control provides a good performance, however the charting (oscillation) is the most drawback of this method. So, to overcome the previous dilemma, a novel combined MPPT employing backstepping and sliding mode controller has been proposed, modeling of PV system and proposed hybrid backstepping-sliding have been presented with details. Simulation tests have been carried out using BP SX 150 solar panel, obtained results demonstrate a huge improvement in term of tracking, less oscillation and low ripple.
backstepping MPPT -sliding mode, MPPT controller, hybrid MPPT based backstepping-sliding, comparative study, PV system
Solar energy is a source of energy that depends on the sun. This energy can generate electricity from photovoltaic panels, thanks to the sunlight captured by solar panels. Solar energy is clean, emitting no greenhouse gases and its raw material [1]. Solar photovoltaic is becoming important as renewable source, it’s inexhaustible and ultimate as source of energy, photovoltaic system can be used in storage (battery, capacitor or coil…etc.), vehicle, grid connected with PV system and water pumping with no noise and simple installation, also it’s an available and clean source.
The PV outputs have non-linear characteristics, so it’s necessary to operate at the maximum power point of the solar panel, this point change with the irradiation and temperature. Many MPPT algorithms have been developed and implemented,in which each one of this methods has its advantages and disadvantages, the most used is perturb and observe P&O [2-7], Incremental conductance IC [8-9], however, these methods have some disadvantages for example the P&O method tracks slowly the maximum power point (MPP) during the rapid solar irradiation changes and IC method oscillates around the maximum power point.
In order to overcome the problemsprevious of conventional methods, suchas the low efficiency and important response time. Intelligent methods have been proposed especially sliding mode and backstepping methods, these methods track the maximum power point of the PV modules under variable environmental conditions by calculating the duty cycle using the DC-DC model and parameter, this calculating gives the two methods an advantage in the calculation of the maximum power point with high performance.
Sliding mode and backstepping are intelligent, robust methods with high tracking efficiency and very quickly response against climate change, however, in order to minimize and overcomes the oscillation and reduces the response time of those controllers (sliding and backstepping methods), a hybrid method is proposed named backstepping-sliding mode MPPT, it is mathematic method based in the calculating of the PV system parameters starting with outputs PV voltage and current and the reference voltage, however, the climate changes (irradiation and temperature) effect directly to the reference voltage, which must be calculated perfectly. In this paper, mathematic method is used to calculate the reference. The hybrid MPPT treats the disadvantage of backstepping and sliding mode by the application of hybrid method it based in replacing the step one of backstepping method by the slotine surface of sliding mode, the result obtained in this method minimized the oscillation of both recent methods and little minimize for the response time.
A brief review of papers studying the PV system using the sliding mode technique has been summarized in Table 1:
Table 1. Sliding mode application
|
Methods |
references |
years |
Remarque |
|
Sliding mode controller (SMC) |
[10] |
2009 |
The authors proposed a sliding mode MPPT to maximize the power output, under climate and load changes and using DC-DC boost converter, the result is verified through experiments and simulations, the proposed method show robustness to the condition changes with fast response time. |
|
[11] |
2013 |
The sliding-mode based MPPT method in comparison to PWM based MPPTs, the results obtained show a fast dynamic to the sliding mode in convergence time 15ms in which they claimed that it the fastest convergence ever reported until this paper, the sliding mode shows stability in at operation points, the authors also spoke about the shading effect. |
|
|
[12] |
2013 |
The authors using sliding surface which is based on INC method, the robustness of the method is investigated in the presence of the load changes and climate variation with three types of DC-DC converter: Boost, buck and buck-boost, the results show the effeteness of the approach with fast response time and high stability, at the last comparative study between Model Predictive Control (MPC) and the proposed method, the result shows that sliding mode show little oscillation when the MPC shows much oscillation. |
|
|
[13] |
2014 |
This paper proposed sliding mode controller (SMC) to maximize the photovoltaic panel at it maximum power using DC-DC boost controlled by DS1104 R&D controller board under the irradiation and temperature variation, the result is compared with perturb and observe and INC methods, the authors show experimental result, in which the proposed method show effectiveness in stability and response time compared to the others method. |
|
|
[14] |
2015 |
The authors used sliding mode MPPT to drive DC-DC boost to maximize the PV system at it maximum power under the irradiation and temperature variation, the result obtain show the effeteness of the method with high stability and low dynamic response up to 0.2 second which is higher when is compared to the other works. |
|
|
[15] |
2016 |
The authors proposed a sliding mode as MPPT controller by calculating the duty cycles to drive a DC-DC boost converter, the authors used MPPT to calculate the reference voltage, the results obtained show the effeteness of the controller with fast response time under any change of environment |
|
|
Backstepping-sliding mode controller |
Assam et al |
In order to elevate the performance of both controllers sliding mode and backstepping controllers, a new hybrid structure has been applied named Backstepping-sliding mode controller, the oscillation of both method was clear in the previous work, this method will minimize the oscillation and the response time under any changes of temperature or irradiation, this method is applied to drive DC-DC boost and solar panel module BPSX150, in which provide the maximum power. |
|
The PV array current can be written by following equation:
${{I}_{0}}={{N}_{p}}{{I}_{ph}}-{{N}_{p}}{{I}_{rs}}\left[ {{e}^{\frac{q(V+{{R}_{s}}{{I}_{o}})}{AkT{{N}_{s}}}}}-1 \right]-{{N}_{p}}\frac{q(V+{{R}_{s}}{{I}_{o}})}{{{N}_{s}}{{R}_{sh}}}$ (1)
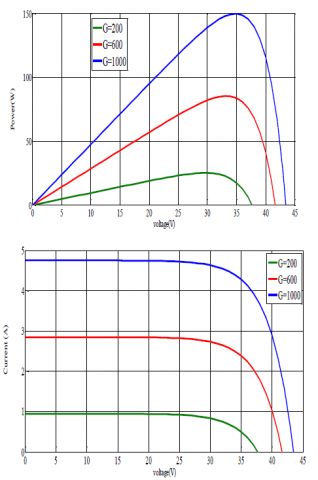
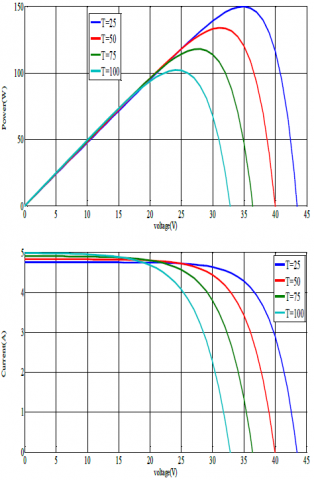
In order to study the effects of the irradiation and temperature to the BP SX 150(P-V, I-V characteristic) , Figure 1 shows the effect of irradiation with fixed temperature and the effect of the temperature with fixed irradiation.
It’s clearly that the power and current depend directly by the change of irradiation which mean that they have proportional relation with irradiation. However, the effect to the voltage is lowly against the temperature which has inverse proportional relation to the power and voltage and it has little effect to the current.
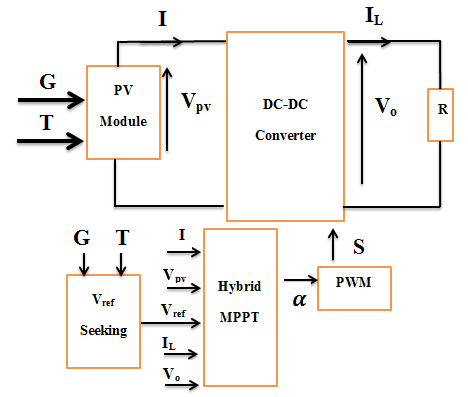
The basic scheme of the system in Figure 2 is presented as the following: PV module, mathematical model to calculate Vref, MPPT and DC-DC boost converter, boost converter is a linear system with second order, the DC-DC boost allow the adaptation between the PV module and the load in which the output voltage V0 is more or equal the input voltage VPV which generate by the PV module, the DC-DC boost used to drive a high voltage form a low voltage the dynamic equations of this converter can be expressed as the following:
$\left\{ \begin{align} & \frac{d{{x}_{1}}}{dt}=\frac{1}{{{C}_{pv}}}{{i}_{pv}}-\frac{1}{{{C}_{pv}}}{{x}_{2}} \\ & \frac{d{{x}_{2}}}{dt}=\frac{1}{L}{{x}_{1}}-\frac{1}{L}(1-\alpha ){{V}_{0}} \\\end{align} \right.$ (2)
where, $\mathrm{x}=\left[x_{1}, x_{2}\right]^{T}=\left[V_{p v} I_{L}\right]^{T}$
And $a \in[0-1]$ is a switching signal control and Z is averaging value of (1-α):
Z=1-α (3)
Figure 1. P-V, I-V characteristic with irradiation changes and temperature changes
Figure 2. PV system with hybrid MPPT
Sliding Mode Control (SMC) is a non-linear type control that has been introduced for the control of variable structure systems (such as the converter) and is based on the concept of controller structure change with the state of the system in order to obtain a desired response. The sliding mode control is therefore all or nothing type [16-17].
The design of the sliding mode control takes into account the problems of stability and good performance in a systematic way in its approach, which is carried out mainly in three complementary steps defined by:
- Choice of sliding surfaces S(X);
- Definition of the conditions of existence and convergence of the sliding regime;
- Determination of the control law.
Obtaining a sliding regime assumes discontinuous control. The Sliding surface should be attractive on both sides. Therefore, if this discontinuous command is essential, it does not prevent a continuous part is added to it. The continuous part can indeed bring to reduce as much as we want the amplitude of the discontinuous part. In the presence of a disturbance, the discontinuous part is essentially intended to verify the conditions of attractiveness. In this case, the structure of a controller by sliding mode consists of two parts, one concerning the exact linearization αeq and the other the stability αn.
The sliding surface is choising using two methods, the firts we consider the following state model [10, 12-13]:
$\left[ \overset{.}{\mathop{X}}\, \right]=\left[ A \right]\left[ X \right]+\left[ B \right]\left[ \alpha \right]$ (4)
The derivative of the sliding surface S is given by:
$\overset{.}{\mathop{S}}\,(x)=\frac{\partial S}{\partial t}=\frac{\partial S}{\partial x}\frac{\partial x}{\partial t}$ (5)
$\alpha ={{\alpha }_{eq}}+{{\alpha }_{n}}$ (6)
Replacing (6) and (4) in (5) we find:
$\overset{.}{\mathop{S}}\,(x)=\frac{\partial S}{\partial t}\left\{ \left[ A \right]\left[ X \right]+\left[ B \right]{{\alpha }_{eq}} \right\}+\frac{\partial S}{\partial t}\left[ B \right]{{\alpha }_{n}}$ (7)
During sliding mode and steady state, the surface is zero, and therefore its derivative and the discontinuous part are also zero. From which, we deduce the expression of the equivalent order:
${{\alpha }_{eq}}=-{{\left\{ \frac{\partial S}{\partial t}\left[ B \right] \right\}}^{-1}}\left\{ \frac{\partial S}{\partial t}\left[ A \right]\left[ X \right] \right\}$ (8)
So that the equivalent order can take a finite value, it is necessary that:
$\frac{\partial S}{\partial t}\left[ B \right]\ne 0$ (9)
During the convergence mode, and replacing the equivalent command by its expression in Eq. (8), we obtain the new expression of the derivative of the area:
$\alpha=1-\frac{L c_{p v}}{V_{0}}\left[\begin{array}{c}{\ddot{v}} \\ {r e f}\end{array}+\frac{1}{L c_{p v}} x_{1}-k \operatorname{sign}(s)-\lambda \dot{e}-\frac{i_{p v}}{c_{p v}}\right]$
$\overset{.}{\mathop{S}}\,(x)=\frac{\partial S}{\partial x}\left[ B \right]{{\alpha }_{n}}$ (10)
Based on the condition of attractiveness $\mathrm{S}(\mathrm{x}) \dot{S}(x)<0$ becomes:
$S(X)\frac{\partial S}{\partial x}\left[ B \right]{{\alpha }_{n}}<0$ (11)
In our system, the equation (4) becomes:
$\overset{.}{\mathop{X}}\,=f(x)+g(x)\alpha $ (12)
By selecting the sliding surface as:
$S=\frac{\partial {{P}_{Pv}}}{\partial {{V}_{PV}}}=0$ (13)
The equivalent command is determined by the following condition:
$\overset{.}{\mathop{S}}\,={{\left[ \frac{\partial S}{\partial X} \right]}^{T}}\overset{.}{\mathop{X}}\,={{\left[ \frac{\partial S}{\partial X} \right]}^{T}}(f(x)+g(x){{\alpha }_{eq}})=0$ (14)
The equivalent control is given then:
${{\alpha }_{eq}}=\frac{{{\left[ \frac{\partial S}{\partial X} \right]}^{T}}f(x)}{{{\left[ \frac{\partial S}{\partial X} \right]}^{T}}g(x)}=1-\frac{{{V}_{PV}}}{{{V}_{0}}}$ (15)
And:
${{\alpha }_{n}}=K*sign(S)$ (16)
The command control is given as:
$\alpha ={{\alpha }_{eq}}+{{\alpha }_{n}}=1-\frac{{{V}_{PV}}}{{{V}_{0}}}+K*sign(S)$ (17)
For the seconde method we use slotine surface, the selection slotine surface by the application in sliding mode controller is [15-16]:
$S={{(\frac{d}{dt}+\lambda )}^{n-1}}e$ (18)
With n: system order
The mathematical model of DC-DC boost is second order n=2, by replacing in Eq. (18)
$S=\overset{.}{\mathop{e}}\,+\lambda e$ (19)
The tracking error is:
$e={{x}_{1}}-{{v}_{ref}}$ (20)
By replacing Eqns. (2) and (20) in (19), the slotine surface is:
$S=\overset{.}{\mathop{{{x}_{1}}}}\,-{{\overset{.}{\mathop{v}}\,}_{ref}}+\lambda e$ (21)
$S=\frac{1}{{{c}_{pv}}}({{i}_{pv}}-{{x}_{2}})-{{\overset{.}{\mathop{v}}\,}_{ref}}+\lambda e$ (22)
The surface derivate is:
$\overset{.}{\mathop{s}}\,=\frac{1}{{{c}_{pv}}}(\overset{.}{\mathop{{{i}_{pv}}}}\,-\overset{.}{\mathop{{{x}_{2}}}}\,)-{{\overset{..}{\mathop{v}}\,}_{ref}}+\lambda \overset{.}{\mathop{e}}\,=-k*sign(s)$ (23)
The command obtained by preplacing Eq. (2) in (23) is:
$\alpha=1-\frac{L c_{p v}}{V_{0}}\left[\begin{array}{c}{\ddot{v}} \\ {r e f}\end{array}+\frac{1}{L c_{p v}} x_{1}-k \operatorname{sign}(s)-\lambda \dot{e}-\frac{i_{p v}}{c_{p v}}\right]$ (24)
Backstepping sliding mode is combined between the two previous controllers (sliding mode and backstepping) in order to minimize the disadvantages of the both strategies. The structure of Backstepping sliding mode is illustrate as the following [17-18].
The equations modeling the boost converter required for synthesis of backstepping control are shown in Eq. (2).
The first tracking error variable is:
${{e}_{1}}={{x}_{1}}-{{v}_{ref}}$ (25)
The tracking error derivative is written as follows:
$~{{\overset{.}{\mathop{e}}\,}_{1}}=(\overset{.}{\mathop{{{x}_{1}}}}\,-\overset{.}{\mathop{{{v}_{pref}}}}\,)=\frac{1}{{{C}_{pv}}}({{i}_{pv}}-{{x}_{2}})-\overset{.}{\mathop{{{v}_{pref}}}}\,$ (26)
The following lyaponov function is considered:
${{V}_{1}}\left( {{e}_{1}} \right)={{V}_{1}}=\frac{1}{2}e_{1}^{2}$ (27)
The derivative versus time using Eq. (5)
$\overset{.}{\mathop{{{V}_{1}}}}\,={{e}_{1}}\text{ }\!\!~\!\!\text{ }\overset{.}{\mathop{{{e}_{1}}}}\,={{e}_{1}}\left( \frac{1}{{{C}_{pv}}}\left( {{i}_{pv}}-{{x}_{2}} \right)-\overset{.}{\mathop{{{V}_{pref}}}}\, \right)$ (28)
Judicious choice of$e_{1}=-k_{1} e_{1}$ permits writing $V_{1}=-k e_{1}^{2}$ where k1 is positive constant that represents a design parameter of backstepping controller.
$-{{k}_{1}}{{e}_{1}}=\frac{1}{{{C}_{pv}}}\left( {{i}_{pv}}-{{x}_{2}} \right)-\overset{.}{\mathop{{{V}_{pref}}}}\,$ (29)
We chose:
$S={{k}_{3}}{{c}_{pv}}{{e}_{1}}+{{i}_{pv}}-{{c}_{pv}}\overset{.}{\mathop{{{v}_{pref}}}}\,-{{x}_{2}}$ (30)
The surface derivate:
$\overset{.}{\mathop{S}}\,={{k}_{1}}{{c}_{pv}}\overset{.}{\mathop{{{e}_{1}}}}\,+\overset{.}{\mathop{{{i}_{pv}}}}\,-{{c}_{pv}}\underset{pref}{\overset{..}{\mathop v}}\,-\overset{.}{\mathop{{{x}_{2}}}}\,$ (31)
By replacing Eq. (2) in (24):
$\overset{.}{\mathop{S}}\,={{k}_{1}}{{c}_{pv}}\overset{.}{\mathop{{{e}_{1}}}}\,+\overset{.}{\mathop{{{i}_{pv}}}}\,-{{c}_{pv}}\underset{pref}{\overset{..}{\mathop v}}\,-\frac{1}{L}{{x}_{1}}+\frac{1}{L}Z{{V}_{0}}$ (32)
With
${{V}_{2}}=\frac{1}{2}e_{1}^{2}+\frac{1}{2}{{s}^{2}}$ (33)
${{\overset{.}{\mathop{V}}\,}_{2}}={{e}_{1}}\overset{.}{\mathop{{{e}_{1}}}}\,+s\overset{.}{\mathop{s}}\,={{e}_{1}}\overset{.}{\mathop{{{e}_{1}}}}\,+s({{k}_{1}}{{c}_{pv}}\overset{.}{\mathop{{{e}_{1}}}}\,+\overset{.}{\mathop{{{i}_{pv}}}}\,-{{c}_{pv}}\underset{pref}{\overset{..}{\mathop v}}\,-\frac{1}{L}{{x}_{1}}+\frac{1}{L}Z{{V}_{0}})$ (34)
The chosen law for the attractive surface is the time derivative of (24) satisfying:
$\overset{.}{\mathop{S}}\,=-{{k}_{2}}sign(S)-{{k}_{3}}S$ (35)
With k2 and k3 are positive value.
By the equality of Eqns. (3), (26) and (25), the command control is given as;
$\alpha=1-\frac{L}{V}\left[-k_{1} c_{p v} e_{1}-i_{p v}+c_{p v} V_{p}+\frac{1}{L} x_{1}-k_{2} \operatorname{sign}(S)-k_{3} S\right]$ (36)
In addition, in order to seek Vref we use the result equation obtained in [19]:
${{V}_{ref}}=\frac{{{N}_{s}}AKT}{q}\log (\frac{{{I}_{ph}}-{{I}_{ref}}+{{I}_{0}}}{{{I}_{0}}})$ (37)
Simulation results are carried out in BP SX 150 PV module and DC-DC boost converter, Figure 2 shows the PV system by using proposed hybrid MPPT method, Table 2 and 3 shows the DC-DC boost parameter and MPPTs parameters.
Table 2. DC-DC Boost parameters
|
Parameter |
Value |
|
Cpv |
3e-4 mF |
|
L |
2e-2 H |
|
Cdc |
2e-4 mF |
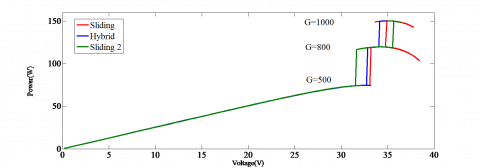
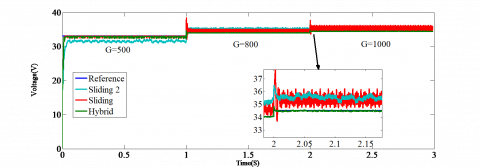
Simulation results are performed in the variation of solar irradiation and normal condition: Figure 3 shows the PV module outputs (power and voltage) and the DC-DC output voltage with three irradiation steps 500, 800 and 1000 w/m2 with 1 second for each change. Figures 4-7 show comparative study between hybrid and sliding mode MPPT in three steps of irradiation changes 500, 800 and 1000 w/m2.
Table 3. MPPTs parameters
|
Controller |
Parameter |
Value |
|
Backstepping-sliding mode |
k1 |
5 |
|
k2 |
30 |
|
|
k3 |
2 |
|
|
Sliding mode |
k |
0.2 |
Figure 3. P-V curves with Hybrid and sliding mode MPPT under three irradiation changes
Figure 4. I-V curves with Hybrid and sliding mode MPPT under three irradiation changes
Figure 5. Output voltage for Hybrid and sliding mode MPPT under three irradiation changes
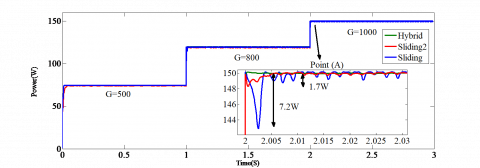
Figure 6. Output power for Hybrid and sliding mode MPPT under three irradiation changes
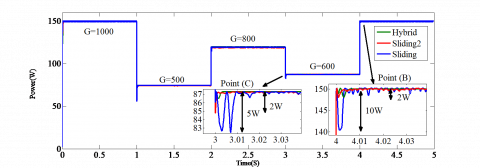
Figure 7. Overshoot output power for Hybrid and sliding mode MPPT under three irradiation changes
Obtained results presented in Figure 3 and Figure 4 show that all methods reach the MPP for different irradiation levels perfectly. However, to compare the effeciency of proposed hybrid MPPT compared to other methods, Figure 5, Figure 6 and Figure 7 present reference voltage and output power resepectively, in whichthe reference voltage has been calculated with high accuracy for all methods. However the sliding mode shows a lot of oscillation compared to the hybrid method, it can be seen that is the important disadvantages of the sliding mode and the hybrid method minimized succefully the oscillation.
Table 4. MPPTs perfomances
|
Index |
Point (A) |
Point (B) |
Point (C) |
|
|
overshoot |
Sliding |
7.2 W |
10 w |
5 w |
|
Sliding 2 |
1.7 W |
2 w |
2 w |
|
|
Hybrid |
|
2 w |
0.5 w |
|
|
Oscillation |
Sliding |
1 w |
1.1 W |
0.1 |
|
Sliding 2 |
0.7 W |
0.6 W |
0.3 |
|
|
Hybrid |
0.06 |
0.04 w |
0.02 w |
|
From Figure 6, it can be observed that the obtained output power in three steps of irradiation, it demonstrate clearly that the three methods sliding 1, sliding 2 and proposed hybrid backstepping-sliding MPPT guarantee the maximum power point in the three irradiationsteps, however, hybrid backstepping-sliding MPPT operate the maximum point with less oscillation compared to sliding methods.
The output power overshoot for three MPPT methods is presented in Figure 7, in which it can be observed an enormous improvement obtained with proposed hybrid backstepping- sliding MPPT method. A comparison of MPPT perfomances has been shown in Table 4.
In this paper, new hybrid MPPT controller combining backstepping- sliding techniques has been presented.The investigated PV system is based on BP SX 150 solar panel connected to DC-DC boost converter . Simulation results have established under several atmospheric conditions, in which many indexes perfomances have studied. The obtained results showed the high performance of the proposed method compared to sliding methods especialy in term of low ripple and low overshoot. Hense,the proposed hybrid MPPT controller can be selected as one of the most suitable MPPT for PV systems operating under variable conditions.
[1] Liserre, M., Sauter, T., Hung, J.Y. (2010). Future energy systems: Integrating renewable energy sources into the smart power grid through industrial electronics. IEEE Industrial Electronics Magazine, 4(1): 18-37. https://doi.org/10.1109/MIE.2010.935861
[2] Sera, D., Mathe, L., Kerekes, T., Spataru, S.V., Teodorescu, R. (2013). On the perturb-and-observe and incremental conductance MPPT methods for PV systems. IEEE Journal of Photovoltaics, 3(3): 1070-1078. https://doi.org/10.1109/JPHOTOV.2013.2261118
[3] Petrone, G., Spagnuolo, G., Vitelli, M. (2011). A multivariable perturb-and-observe maximum power point tracking technique applied to a single-stage photovoltaic inverter. IEEE Transactions on Industrial Electronics, 58(1): 76-84. https://doi.org/10.1109/TIE.2010.2044734
[4] Piegari, L., Rizzo, R. (2010). Adaptive perturb and observe algorithm for photovoltaic maximum power point tracking. IET Renewable Power Generation, 4(4): 317-328. https://doi.org/10.1049/iet-rpg.2009.0006
[5] Ahmed, J., Salam, Z. (2015). An improved perturb and observe (P&O) maximum power point tracking (MPPT) algorithm for higher efficiency. Applied Energy, 150: 97-108. https://doi.org/10.1016/j.apenergy.2015.04.006
[6] Manukonda, D., Gorantla, S.R. (2018). Design and comparison of MPPT based oscillatory wind turbine with conventional wind turbine. European Journal of Electrical Engineering, 20(5-6): 589. https://doi.org/10.3166/ejee.20.589-600
[7] Harrag, A., Messalti, S. (2015). Variable step size modified P&O MPPT algorithm using GA-based hybrid offline/online PID controller. Renewable and Sustainable Energy Reviews, 49: 1247-1260. https://doi.org/https://doi.org/10.1016/j.rser.2015.05.003
[8] Banu, I.V., Beniugă, R., Istrate, M. (2013). Comparative analysis of the perturb-and-observe and incremental conductance MPPT methods. In 2013 8th International Symposium on Advanced Topics in Electrical Engineering (ATEE), pp. 1-4. IEEE. https://doi.org/10.1109/ATEE.2013.6563483
[9] Loukriz, A., Haddadi, M., Messalti, S. (2016). Simulation and experimental design of a new advanced variable step size incremental conductance MPPT algorithm for PV systems. ISA Transactions, 62: 30-38. https://doi.org/https://doi.org/10.1016/j.isatra.2015.08.006
[10] Chu, C.C., Chen, C.L. (2009). Robust maximum power point tracking method for photovoltaic cells: A sliding mode control approach. Solar Energy, 83(8): 1370-1378. https://doi.org/https://doi.org/10.1016/j.solener.2009.03.005
[11] Levron, Y., Shmilovitz, D. (2013). Maximum power point tracking employing sliding mode control. IEEE Transactions on Circuits and Systems I: Regular Papers, 60(3): 724-732. https://doi.org/10.1109/TCSI.2012.2215760
[12] Prabhakaran, A., Mathew, A.S. (2016). Sliding mode MPPT based control for a solar photovoltaic system. International Research Journal of Engineering and Technology (IRJET), 3(6): 2600-2604.
[13] Belkaid, A., Gaubert, J.P., Gherbi, A., Rahmani, L. (2014). Maximum power point tracking for photovoltaic systems with boost converter sliding mode control. In 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), pp. 556-561. https://doi.org/10.1109/ISIE.2014.6864673
[14] Mule, S.M., Sankeshwari, S.S. (2015). Sliding mode control based maximum power point tracking of PV system. IOSR Journal of Electrical and Electronics Engineering Ver. II, 10(4): 2278-1676. https://doi.org/10.9790/1676-10425863
[15] Slotine, J.J., Li, W. (1998). Applied Nonlinear Control, Prentice-Hall, Englewood Cliffs, NJ, 1991.
[16] Kechich, A., Mazari, B. (2008). La commande par mode glissant: Application à la machine synchrone à aimants permanents (approche linéaire). Afrique Science, 4(1): 21-37.
[17] Bouadi, H., Bouchoucha, M., Tadjine, M. (2007). Sliding mode control based on backstepping approach for an UAV type-quadrotor. World Academy of Science, Engineering and Technology, 26(5): 22-27. https://doi.org/10.5281/zenodo.1077447
[18] Bouabdallah, S., Siegwart, R. (2005). Backstepping and sliding-mode techniques applied to an indoor micro quadrotor. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 2247-2252. IEEE. https://doi.org/10.1109/ROBOT.2005.1570447
[19] Dahech, K., Allouche, M., Damak, T., Tadeo, F. (2017). Backstepping sliding mode control for maximum power point tracking of a photovoltaic system. Electric Power Systems Research, 143: 182-188. https://doi.org/10.1016/j.epsr.2016.10.043