Muhammad Abdullah Asyrof Baizuhdi![]() | Istiqomah*
| Istiqomah*![]() | Achmad Rizal
| Achmad Rizal![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Each person has a unique gait, which is their method or trait for walking. This movement follows a basic structure, although there are variances that differ from person to person. Gait analysis examines a number of elements of a person's gait pattern as they run or walk. The measurement tools utilized have a significant impact on the gait analysis's validity and reliability. The effectiveness of the machine learning algorithms K-Nearest Neighbour (KNN), Support Vector Machine (SVM), and Random Forest for biometric detection utilizing individual gaits was examined in this study. With the input data being an output signal from a gyroscope sensor integrated into a smartphone, multilevel wavelet entropy (MWE) is employed as a feature extraction technique. The results of the performance testing revealed that 85% accuracy was the greatest level for identifying gait data. These conclusions were reached by classifying data using either the KNN or Random Forest algorithms with MWE and Db2 mother wavelets at all decomposition levels, from 1 to 5. With 10 data for each subject, the suggested method was evaluated on 20 subjects.
gait analysis, gyroscope, wavelet entropy, machine learning
Gait is the way or characteristic of each individual when walking. Gait is believed to be different between individuals because gait can be influenced by body weight, body posture, and other things that will also be different for each individual. From a biomechanical aspect, human gait consists of synchronized and integrated movements of hundreds of muscles and joints. This movement has a basic pattern, but has variations that vary from one individual to another [1, 2]. Because of the unique gait, gait is used as a biometric mode to identify individuals. There are numerous methods for acquiring a person's gait signal, which makes the gait recognition method a rapidly expanding field of study. In general, gait signal collecting techniques can use sensors or use video [3].
The first method used by humans for gait analysis was sensor-based gait analysis. The benefits of sensor-based gait analysis, particularly wearable sensors [4] are as follows: The more sensors used, the greater the accuracy obtained, each sensor is designed to obtain a specific signal from a specific person, wearable sensors protect user privacy better than cameras that can record the user's face and body, a supervisor is required to observe the video footage, and video signal processing poses greater computational challenges. The installation of sensors, which can interfere with user comfort and mobility, power supply, data transmission, and signal processing, is a weakness of gait analysis using sensors [5].
For the next idea, the gait can be used for security and surveillance applications [6], and maybe it can also be used as a smart key that can detect people based on how they walk to open doors or something else. To support this idea, a device that integrates the sensors used and the communication system is needed. One device that can be used is a smartphone, which has an inertia sensor built into it. Smartphones already have a gyroscope and accelerometer available, which can be used to acquire gait data [7]. Meanwhile, Bluetooth or WiFi technology on smartphones can be used for wireless data transmission [8]. However, previous research still has problems, namely the placement of smartphones that are still tied to the human thigh [9]. It is impractical to utilize a gait device as a wearable if a sensor is placed on a human thigh. Several gait analyses have been developed with different methods, namely the Linear Predictive Coding (LPC) feature extraction [1], and the Deep Neural classification networks method [4]. Research on individual gait recognition with a common gyroscope sensor or smartphone position in daily life, for example, in the front pocket of their pants, is needed for further implementation [10]. More realistic sensor placement is needed for the development of gait identification wearable devices without reducing detection precision or accuracy.
In this study, a gait analysis system that uses a smartphone with a built-in gyroscope sensor with realistic position example in a pocket to collect information on how people walk or gait will be created. The smartphone will be placed in the respondent's front pocket of their pants. Due to the lack of idea of sensor placement, selecting preprocessing before the recognition process becomes crucial. One of the widely used gait data preprocessing methods is wavelet [11, 12]. Wavelets analyze the data at multiple scales, which can assist in recognizing and segmenting the gait cycle at distinct phases. Entropy is a procedure introduced after wavelet and is useful for determining which aspects in gait data contain the most important and pertinent information. In this study, wavelet entropy is recommended as a feature extraction method.
The wavelet entropy method will be used to extract features, and three different machine learning classifications K-Nearest Neighbor (kNN), Random Forest, and Support Vector Machine (SVM) are used to categorize the gait data. It is believed that the suggested system will provide a reliable alternative to gyroscope sensors for gait analysis. It the future it can be possibility for individual identifier as security like enter home.
This section will explain the proposed research method and detail each block component's process. From the dataset's collection, this section explains feature extraction and machine learning method to recognize individual gait for each subject in more detail.
2.1 Proposed method
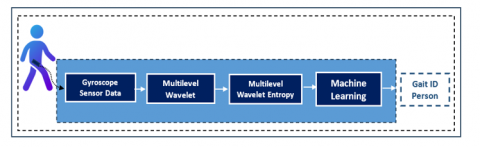
Figure 1 displays the suggested approach in this study. The gyroscope sensor inside the mobile phone was used to record the subject's gait. In order to clear the data, the obtained signal is also pre-processed. Multilevel wavelet entropy is used to extract features from the data. The acquired attributes are fed into the classifier to identify the individual with the relevant gait. The following subsections provide details on each process.
Figure 1. Diagram block of proposed method
2.2 Collection of gait dataset
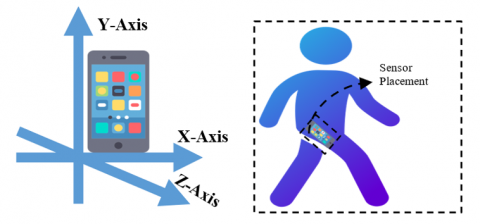
In this research, gait data collection or the way people walk is taken by a smartphone. The gyroscope signal data is taken using the gyroscope sensor on the Samsung Galaxy A52 smartphone, which will be placed in the front pocket of the respondent's pants, as shown in the picture. Propose the smartphone's placement in the subject's pocket for further application development because people commonly put the smartphone in that location. Data were taken from 20 respondents with a data collection duration of 10 seconds with a sample rate of 100 Hz by walking the same way as the respondents did when walking every day. The axis of the gyroscope is shown in Figure 2(a). In this study, it will be tested which axis will produce the highest accuracy. The placement of the gyroscope sensor is shown in Figure 2(b). The placement of the sensor in the trouser pocket mimics the conditions people do when mobile phones are usually placed in the trouser pocket. It differs from previous research, which placed the sensor on the thigh [13]. Cleansing is carried out on the data, which removes non-gait signals, such as when the subject puts the mobile phone in his pocket or other movements that are not included in the gait.
Figure 2. Gyroscope sensor for data acquisition (a) axis of sensor (b) sensor placement
2.3 Multi level wavelet entropy
A technique for measuring signal complexity that uses wavelet transform-based entropy is called wavelet entropy [14]. This technique combines entropy with the wavelet decomposition mechanism. Decomposition wavelets are important tools for analyzing gait signals because they simplify complicated movement patterns into simpler parts that are simpler to understand and analyze [11, 12]. The components that make up a gait signal are complicated and occur at different frequencies. These signals may be examined at various resolution levels thanks to wavelet decomposition, which offers thorough insights into both the slow and fast components of gait. Entropy measures the degree of complexity or randomness in the data and can be used to determine which features, at each wavelet decomposition level while the subject is walking, contain the most important and pertinent information [15]. The discrete wavelet transform (DWT) procedure, which is used in Eq. (1) [16], results in the calculation of wavelet entropy from the energy of each wavelet sub band.
$\left(\mathrm{W}_{\Psi} \mathrm{S}\right)(\mathrm{j}, \mathrm{k})=\int_{-\infty}^{+\infty} S(t) \Psi_{\mathrm{j}, \mathrm{k}}(\mathrm{t}) \mathrm{dt}$ (1)
where, $\Psi_{i k}(t)$ is the discrete mother wavelet function, j and k are the scale and translation parameters, respectively, with $\mathrm{j} \neq$ 0 . If the wavelet coefficient given $\mathrm{C}_{\mathrm{i}}(\mathrm{k})=\left(\mathrm{S}, \Psi_{\mathrm{i}}, \mathrm{k}\right)$ is generated by DWT, then the signal energy on the scale $\mathrm{j}=$ $1,2 \ldots, \mathrm{~N}$ can be written as follows:
$\mathrm{E}_{\mathrm{i}}=\sum_{\mathrm{k}}\left|\mathrm{C}_{\mathrm{i}}(\mathrm{k})\right|^2$ (2)
The Eq. (3) can be used to express the overall energy of the signal produced by the DWT.
ETot $=\|\mathrm{S}\| 2=\sum_{\mathrm{i}} \sum_{\mathrm{k}}\left|\mathrm{C}_{\mathrm{i}}(\mathrm{k})\right| 2=\sum_{\mathrm{i}} \mathrm{E}_{\mathrm{i}}$ (3)
The following Eq. (4) can be used to express the relative wavelet energy for the j scale.
$\mathrm{P}_{\mathrm{i}}=\mathrm{E}_{\mathrm{j}} /$ Etot (4)
In such case, wavelet entropy is defined as follows Eq. (5) [17].
$\mathrm{WE}=-\sum \mathrm{pi} \ln \mathrm{pi}$ (5)
Proposed multilevel entropy (MWE) [18] as an extension of wavelet entropy [19]. MWE is WE calculated at several levels of decomposition. Thus MWE level 5 will produce 5 WE values, namely WE1, WE2, …, and WE5. In this study, MWE level 5 was used as in several research [20].
2.4 Machine learning methods
In this research, we try to get whether Multilevel Wavelet Entropy can become good feature extraction to recognize individual gait if the position of the sensor in the trouser pocket is different from the common gyroscope sensor placed for gait analysis. The following are the steps in training a multilevel wavelet entropy approach and a machine learning model:
(1) Gyroscopes data are decomposed in several mother wavelet and several level and then calculate complexity or randomness in the data using entropy.
(2) The level wavelets are created from 1 to 5 levels with mother wavelet Haar, Db2 and Db3.
(3) Then, it looked for the best features from the previous combination and the best machine-learning model from GridSearchCV.
(4) The search for the best model was carried out with all supervised machine learning; only three were selected, which had the best accuracy, as presented in this journal.
This research also compares the all-machine learning model and is gotten classifier among KNN, SVM and Random Forest process good model with highest accuracy. Furthermore, the classifiers method elaborates on in this section.
2.4.1 KNN
K-Nearest Neighbor (KNN) is a non-parametric classification technique that is simple but frequently highly successful [21]. The closest training data among the k training data is determined by KNN when classifying new data. The closest data distance can be determined using city blocks, Euclidean distance computations, or other distance calculations. The most accurate results are obtained when K is set to a value between 1 and K [22]. To ensure that the closest number of data classes is not the same, K is typically selected to be odd.
2.4.2 Random Forest
The key distinction between the Bagging approach and the most current ensemble method, random forest, is the use of random feature selection. At each branch selection phase while creating a decision tree, RF chooses a feature set at random before carrying on with the standard branch selection procedure in feature testing [23]. In order to create an uncropped classification and regression tree (CART) from each self-starter sample, the RF classification approach first extracts a self-starter sample T from the training data. In order to generate the classification, all of the single trees that were trained using the majority vote are predicted [24].
2.4.3 SVM
SVMs are commonly employed as classification algorithms for things like voice, pictures, and body motions. SVM creates an ideal separation hyperplane into a high dimension feature space to discriminate between two or more categories of objects since the entries are mapped using non-linear functions. This hypothesis was made in 1995 [24] by Cortes and Vapnik. The separation hyperplane is located in this new space, which is created by mapping the input space into a high-dimensional feature space for the nonlinear separable problem [25]. The best hyperplane should be chosen that has the most clearance between classes, or the hyperplane that best divides the classes, because the best hyperplane must accurately differentiate between distinct categories. The training procedure is rewritten as an SVM issue to be solved.
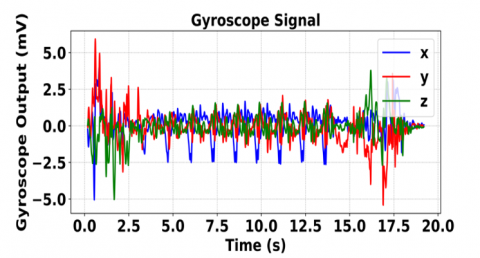
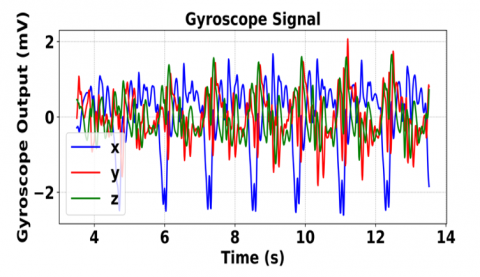
Figure 3 displays a sample of the obtained signal. There are significant changes between 0 and 2.5 seconds. This is a result of the changeover that took place prior to the mobile phone being kept in the trouser pocket. The procedure of taking out the phone from the trouser pocket is seen in the time interval between 15.5 and 17.5. Cleaning is done, which is removing data from a period that does not accurately reflect the subject's walking state, to ensure that the data obtained truly reflects the subject's walking style. Figure 4 displays the outcomes of the cleansing signal. The data is then split once again, yielding a 10-second time window for each dataset.
Figure 3. Raw signal acquired from gyroscope
Figure 4. Signal acquired from gyroscope after cleansing process
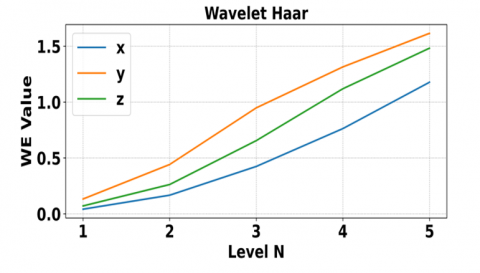
Figure 5. Multilevel wavelet entropy using Haar wavelet
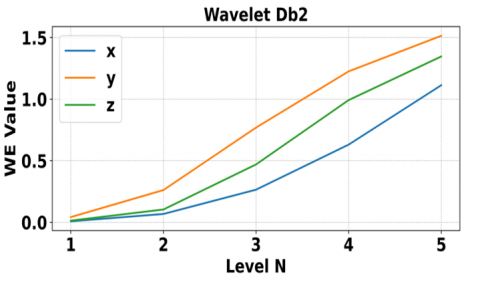
Figure 6. Multilevel wavelet entropy using Db2 wavelet
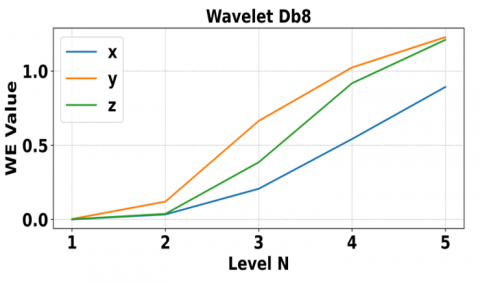
Figure 7. Multilevel wavelet entropy using Db8 wavelet
As mother wavelets, Haar, Daubechies 2, and Daubechies 8 wavelets were used in the study by Hidayat et al. [18]. Figures 5-7 display the wavelet entropy values for each axis at decomposition levels 1 through 5 for each mother wavelet. It is obvious that, when compared to the other axes, the Y axis has the highest entropy value. The Y axis represents vertical movement, the X axis represents left-to-right horizontal movement, and the Z axis represents forward-backward movement, as shown in Figure 2. The signal on the Y axis will fluctuate more than the other axes if the subject travels straight forward, causing the gyroscope position changes to be more up and down. The resulting wavelet entropy is higher than the wavelet entropy on the other axis when the fluctuations are higher.
The mother wavelets employed in this study were of the types Haar, DB2, and Db8. Using a combination of five WE value and one wavelet entropy level, accuracy is computed. On the X, Y, and Z axes at each level, WE values are applied. Each mother wavelet and feature's classification accuracy is shown in Table 1, Table 2 and Table 3. Level 1 of WE each mother wavelet has a value with a better pattern for predicting gait than all levels, and this happens for all classifiers except SVM. The best accuracy from level 1 of each WE mother wavelet is 88% for the Random Forest and KNN classifier. However, it demonstrates that a single WE value is insufficient to differentiate between the gaits of different subjects.
The accuracy of predicting an individual's gait is much enhanced when all levels in each mother wavelet are composited, instead of using only one level of the mother wavelet for each classifier. The random forest classifier successfully integrates all levels of each WE mother wavelet, resulting in an accuracy rate of 98% when employing the WE Haar wavelet as the kind of mother wavelet. The optimal feature for characterizing the pattern of data utilized to categorize each gait is the first level of each mother wavelet, specifically the Haar wavelet.
Table 1. Accuracy using Haar wavelet
|
Classifier |
Accuracy |
|||||
|
Decomposition level |
||||||
|
1 |
2 |
3 |
4 |
5 |
Composite |
|
|
RF |
88% |
76% |
66% |
65% |
48% |
98% |
|
KNN |
88% |
75% |
65% |
64% |
46% |
95% |
|
SVM |
70% |
65% |
62% |
63% |
49% |
83% |
Table 2. Accuracy using Db2 Wavelet
|
Classifier |
Accuracy |
|||||
|
Decomposition level |
||||||
|
1 |
2 |
3 |
4 |
5 |
Composite |
|
|
RF |
77% |
68% |
56% |
55% |
41% |
97% |
|
KNN |
76% |
67% |
54% |
53% |
38% |
91% |
|
SVM |
63% |
58% |
54% |
56% |
43% |
83% |
Table 3. Accuracy using Db8 wavelet
|
Classifier |
Accuracy |
|||||
|
Decomposition level |
||||||
|
1 |
2 |
3 |
4 |
5 |
Composite |
|
|
RF |
50% |
49% |
49% |
40% |
29% |
93% |
|
KNN |
47% |
47% |
47% |
37% |
26% |
87% |
|
SVM |
45% |
49% |
49% |
42% |
30% |
83% |
(a)
(b)
(c)
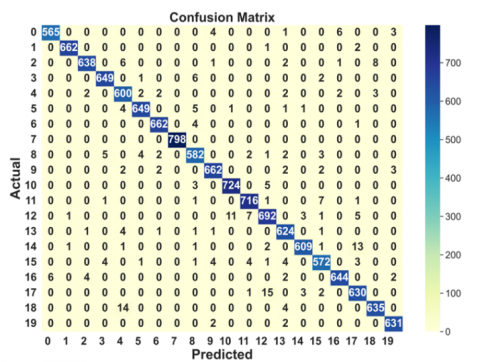
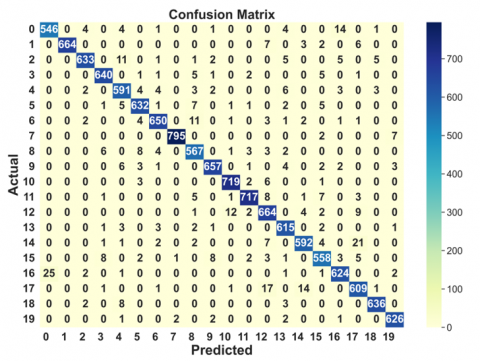
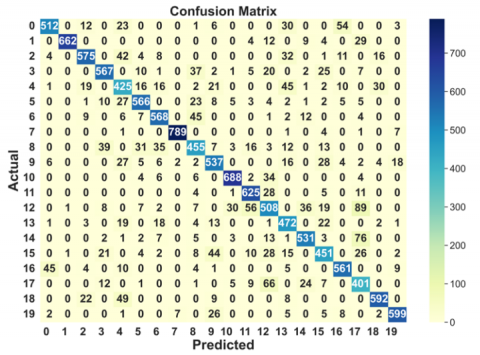
Figure 8. Confusion matrix model with Haar wavelet entropy: (a) Random Forest, (b) KNN, (c) SVM
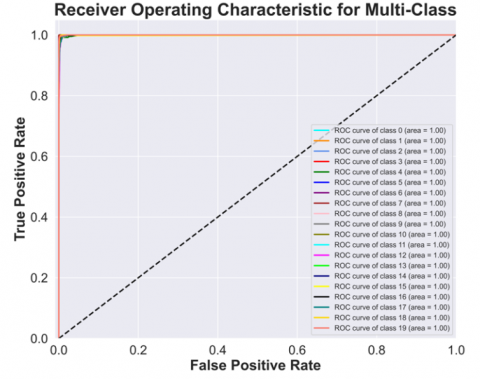
Figure 9. Receiver operating characteristics random forest classifier
Next, the confusion matrix in Figure 8 is used to revalidate the best model, which employs a composite Haar wavelet for every level. Figure 8(a) illustrates how, consistent with earlier accuracy tests, Haar wavelet entry with random forest generates more accurate decisions for each class when the value of the diagonal confusion matrix is higher than that of the other machine learning models in Figures 8(b) and 8(c). ROC for every class in the random forest model in Figure 9 is then further evidenced, consistently yielding a true positive rate value that is near to 1 for each false positive rate. It is possible to deduce from this figure that the F1 score, recall, and precision are all consistently near to 1. Thus, it can be said that Composite Haar wavelet Entropy with Random Forest is the most crucial component that may be utilized for Gait ID detection.
The technique above utilizes all the functionalities of the gyroscope for each axis, namely X, Y, and Z. Table 4 demonstrates the significant lack of precision when employing a single gyroscope axis for level 1 wavelet entropy of Haar. This showcases the manner in which a human being moves by utilizing three distinct axes of motion. A single-axis movement is sufficient for any motion.
Table 4. Accuracy (%) using Haar and one axis of WE
|
Classifier |
Accuracy |
||
|
x-axis |
y-axis |
z-axis |
|
|
RF |
20% |
18% |
14% |
|
KNN |
22% |
20% |
16% |
|
SVM |
27% |
24% |
21% |
Previous studies used the same device, but they placed it differently on the human thigh [9]. It makes it impractical for wearable technology to capture gyroscope data from gait using the Multi-Distance Signal Level Difference extraction capability. This research achieves an accuracy of up to 98% compared to earlier studies that used a more practical site for sensor data collecting. The research is limited by the varying types of inertial sensors used in smartphones. However, new gait ID wearable device applications can be developed with more realistic sensor placements and this research algorithm.
In comparison to earlier LPC studies, the suggested approach is straightforward [13]. The sensor placement in this study is more realistic than that study's, despite the poorer precision. Sample entropy (SampEn) is more complex than MWE, as seen in the study by Ahmadi et al. [17]. SampEn determines several samples at a specific distance and tolerance. However, the tiny number of samples will also skew the SampEn calculations, making them more computationally complex as the data length increases [26]. In this investigation, a gyroscope was used instead of a webcam [27] or a camera like a Kinect since it is more flexible and can be carried in a trouser pocket [28, 29]. Image processing is required when using a camera since it involves more complicated calculations [30].
The proposed method's flaw is that a gyroscope sensor in the trouser pocket allows the mobile phone to move, even when the subject's gait isn't to blame. Noise from the gyro signal can be produced by friction in the pocket of your pants. The data from the gyroscope will also be harmed by using mobile phones for calling or texting.
There is still room for growth in this research. Gyro sensors in mobile phones enable for seamless authentication without the requirement for a code or biometric input from the subject. It would be interesting to conduct more study on the levels of MWE or the application of additional MWE variants, such as multilevel wavelet packet entropy (MWPE) [31]. Another option for increasing accuracy is to use a more advanced classifier.
Using multilevel wavelet entropy and machine learning, this work suggests a way for analyzing gaits. The gyroscope sensor in the user's mobile phone, which is kept in their pocket to mimic their actual situation, is used to collect gait analysis. Through experimentation with Wavelet Entropy (WE) with various mother wavelets and many levels, it has been shown that level 1 is the most crucial characteristic among all the levels tested, achieving a maximum accuracy of 88%. Based on the test data, it has been shown that the Haar wavelet, with five decomposition levels and considering all gyroscope axes, achieves the maximum accuracy of 98% when utilizing all the properties of each level of the WE mother wavelet. The Random Forest classifier achieves the highest level of accuracy. Based on the test results, it is not possible to attain high accuracy when using a single-axis gyro signal. When it may be convenient, utilizing a cellular device when it is situated in your pocket can potentially result in disruptive noise. Exploring mother wavelets, decomposition levels, and advanced classifiers would be pretty fascinating. In the future, this research will look for other extraction features based on wavelet data preprocessing. Gait ID wearable devices will also be developed for applications in security and other fields.
[1] Chen, S., Lach, J., Lo, B., Yang, G.Z. (2016). Toward pervasive gait analysis with wearable sensors: A systematic review. IEEE Journal of Biomedical and Health Informatics, 20(6): 1521-1537. https://doi.org/10.1109/JBHI.2016.2608720
[2] Lee, L., Grimson, W.E.L. (2002). Gait analysis for recognition and classification. In Proceedings of Fifth IEEE International Conference on Automatic Face Gesture Recognition, Washington, DC, USA, pp. 155-162. https://doi.org/10.1109/AFGR.2002.1004148
[3] Khera, P., Kumar, N. (2020). Role of machine learning in gait analysis: A review. Journal of Medical Engineering & Technology, 44(8): 441-467. https://doi.org/10.1080/03091902.2020.1822940
[4] Serpush, F., Menhaj, M.B., Masoumi, B., Karasfi, B. (2022). Wearable sensor-based human activity recognition in the smart healthcare system. Computational Intelligence and Neuroscience, 2022(1): 1391906. https://doi.org/10.1155/2022/1391906
[5] Ahad, M.A.R., Antar, A.D., Ahmed, M., Ahad, M.A.R., Antar, A.D., Ahmed, M. (2021). Sensor-based human activity recognition: Challenges ahead. IoT Sensor-Based Activity Recognition: Human Activity Recognition, Springer, Cham, 175-189. https://doi.org/10.1007/978-3-030-51379-5_10
[6] Khaliluzzaman, M., Uddin, A., Deb, K., Hasan, M.J. (2023). Person recognition based on deep gait: A survey. Sensors, 23(10): 4875. https://doi.org/10.3390/s23104875
[7] Kiernan, D., Dunn Siino, K., Hawkins, D.A. (2023). Unsupervised gait event identification with a single wearable accelerometer and/or gyroscope: A comparison of methods across running speeds, surfaces, and foot strike patterns. Sensors, 23(11): 5022. https://doi.org/10.3390/s23115022
[8] Landreani, F., Caiani, E.G. (2017). Smartphone accelerometers for the detection of heart rate. Expert Rev Med Devices, 14(12): 935-948. https://doi.org/10.1080/17434440.2017.1407647
[9] Istiqomah, Rizal, A., Atmaja, R.D. (2023). Individual recognition based on gait using multi-distance signal level difference sample entropy. Ingénierie des Systèmes d’Information, 28(2): 469-474. https://doi.org/10.18280/isi.280223
[10] Sprager, S., Juric, M.B. (2015). Inertial sensor-based gait recognition: A review. Sensors, 15(9): 22089-22127. https://doi.org/10.3390/s150922089
[11] Soangra, R., Lockhart, T.E., Van de Berge, N. (2011). An approach for identifying gait events using wavelet denoising technique and single wireless IMU. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 55(1): 1990-1994. https://doi.org/10.1177/1071181311551415
[12] Castaño-Pino, Y.J., Navarro, A., Muñoz, B., Orozco, J.L. (2019). Using wavelets for gait and arm swing analysis. Wavelet Transform and Complexity, IntechOpen. https://doi.org/10.5772/intechopen.84962
[13] Annas, M.S., Rizal, A., Atmaja, R.D. (2017). Pengenalan individu berdasarkan gait menggunakan sensor giroskop. Jurnal Nasional Teknik Elektro dan Teknologi Informasi (JNTETI), 6(2): 210-214. https://doi.org/10.22146/jnteti.v6i2.317
[14] Zunino, L., Pérez, D.G., Garavaglia, M., Rosso, O.A. (2007). Wavelet entropy of stochastic processes. Physica A: Statistical Mechanics and its Applications, 379(2): 503-512. https://doi.org/10.1016/j.physa.2006.12.057
[15] Richman, J.S., Moorman, J.R. (2000). Physiological time-series analysis using approximate entropy and sample entropy. American Journal of Physiology-Heart and Circulatory Physiology, 278(6): H2039-H2049. https://doi.org/10.1152/ajpheart.2000.278.6.H2039
[16] Toulni, Y., Drissi, T.B., Nsiri, B. (2021). Electrocardiogram signals classification using discrete wavelet transform and Support Vector Machine classifier. IAES International Journal of Artificial Intelligence, 10(4): 960-970. https://doi.org/10.11591/IJAI.V10.I4.PP960-970
[17] Ahmadi, S., Sepehri, N., Wu, C., Szturm, T. (2018). Sample entropy of human gait center of pressure displacement: A systematic methodological analysis. Entropy, 20(8): 579. https://doi.org/10.3390/e20080579
[18] Hidayat, R., Rizal, A., Bejo, A., Sumaryono, S. (2019). Vowel Sound Analysis in the Indonesian Language using Multilevel Wavelet Entropy. In 2019 5th International Conference on Science in Information Technology (ICSITech), Yogyakarta, Indonesia, pp. 66-70. https://doi.org/10.1109/ICSITech46713.2019.8987551
[19] Garavaglia, M., Rosso, O.A. (2007). Wavelet entropy of stochastic processes. Physica A, 379: 503-512. https://doi.org/10.1016/j.physa.2006.12.057
[20] Rizal, A., Puspitasari, A. (2022). Lung sound classification using wavelet transform and entropy to detect lung abnormality. Serbian Journal of Electrical Engineering, 19(1): 79-98. https://doi.org/10.2298/SJEE2201079R
[21] Dharmmesta, R.A., Jaya, I.G.P., Rizal, A., Istiqomah. (2022). Classification of foot kicks in Taekwondo using SVM and KNN algorithms. In 2022 IEEE International Conference on Industry 4.0, Artificial Intelligence, and Communications Technology (IAICT), BALI, Indonesia, pp. 36-41. https://doi.org/10.1109/IAICT55358.2022.9887475
[22] Mohebbanaaz, L.V.R., Padma Sai, Y. (2021). Classification of arrhythmia beats using optimized K-Nearest Neighbor classifier. In S. S. N. Udgata & S. Sethi (Eds.), Intelligent Systems, Springer Singapore, pp. 349-359. https://doi.org/10.1007/978-981-33-6081-5_31
[23] Razi, A.P., Einalou, Z., Manthouri, M. (2021). Sleep apnea classification using random forest via ECG. Sleep Vigil, 5(1): 141-146. https://doi.org/10.1007/s41782-021-00138-4
[24] Cortes, C., Vapnik, V. (1995). Support vector machine. Mach Learn, 1303-1308. https://doi.org/10.1007/978-0-387-73003-5_299
[25] Niu, Y., Shang, Y., Tian, Y. (2019). Multi-view SVM classification with feature selection. Procedia Computer Science, 162: 405-412. https://doi.org/10.1016/j.procs.2019.12.004
[26] Humeau-Heurtier, A. (2015). The multiscale entropy algorithm and its variants: A review. Entropy, 17(5): 3110-3123. https://doi.org/10.3390/e17053110
[27] Erfianto, B., Rizal, A., Hadiyoso, S. (2023). Empirical mode decomposition and Hilbert spectrum for abnormality detection in normal and abnormal walking transitions. International Journal of Environmental Research and Public Health, 20(5): 3879. https://doi.org/10.3390/ijerph20053879
[28] Xu, X., McGorry, R.W., Chou, L.S., Lin, J.H., Chang, C.C. (2015). Accuracy of the Microsoft Kinect™ for measuring gait parameters during treadmill walking. Gait Posture, 42(2): 145-151. https://doi.org/10.1016/j.gaitpost.2015.05.002
[29] Gholami, F., Trojan, D.A., Kovecses, J., Haddad, W.M., Gholami, B. (2017). A Microsoft Kinect-based point-of-care gait assessment framework for multiple sclerosis patients. IEEE Journal of Biomedical and Health Informatics, 21(5): 1376-1385. https://doi.org/10.1109/JBHI.2016.2593692
[30] Guo, Y., Deligianni, F., Gu, X., Yang, G.Z. (2019). 3-D canonical pose estimation and abnormal gait recognition with a single RGB-D camera. IEEE Robotics and Automation Letters, 4(4): 3617-3624. https://doi.org/10.1109/LRA.2019.2928775
[31] Rizal, A., Wijayanto, I. (2020). Phonocardiogram classification using multilevel wavelet packet entropy and random forest. In 2020 6th International Conference on Science and Technology (ICST), Yogyakarta, Indonesia, pp. 1-4. https://doi.org/10.1109/ICST50505.2020.9732841