Lailis Syafaah![]() | Amrul Faruq*
| Amrul Faruq*![]() | Novendra Setyawan
| Novendra Setyawan![]() | Muhammad Ikhwanul Khair
| Muhammad Ikhwanul Khair![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The poultry industry faces significant challenges in maintaining the health and welfare of chickens, with early detection of sick or dead birds being crucial for effective management and disease control. This paper presents a novel Sick and Dead Chicken Detection System leveraging the YOLO (You Only Look Once) algorithm, a state-of-the-art object detection framework. Our system employs YOLO's real-time image processing capabilities to identify and classify sick and deceased chickens from video feeds or images with high accuracy and speed. Currently chicken farmers are still unable to develop their farms to be able to keep up with increasing needs, this is due to the many chicken farming systems that have not been maximized in the development of their livestock systems, as one example is controlling sick chickens which are still being checked manually. system utilizes YOLO's real-time image processing capabilities to identify and classify sick and deceased chickens by paying attention to symptoms of disease including the movement of chickens by utilizing image processing with the YOLO algorithm, there are several stages in implementing YOLO, namely dataset collection and annotation, preprocessing, dataset division, label file creation, validation and hyperparameter setup, training and model application. We trained our model on a dataset comprising 435 annotated images of chickens exhibiting various health conditions. The proposed system enhances operational efficiency, minimizes human error, and supports timely interventions. Results indicate a significant improvement in detection accuracy and response time compared to traditional methods. The performance of the model applied using the confusion matrix method, so that good results are obtained by applying the YOLOv8 algorithm with an F1 rate of 94%, Precision 100%, Confidence 89.2%, Recall-Confidence of 100%, and Precision-Recall by 97% mAP@0.5. Each variable obtained an accuracy of 71.25% for dead chickens, 98.25% for sick chickens and healthy chickens.
chicken detection, YOLOv8, sick farm animals
Food needs in the future will increase along with the development of the human population, one of the most popular human food needs comes from animals in the form of meat. In Indonesia, chicken meat consumption per capita was higher (5.683kg) than beef (0.469kg) and others as stated by Vanany et al. [1]. Chicken is one of the biggest contributors to the food needs themselves, but chicken farmers are currently still unable to develop their farms to be able to keep up with the increasing needs, this is due to the many chicken farming systems that have not been maximized in the development of their farming systems, as an example is the control of sick chickens which are still checked manually if in a short time there is disease transmission to other healthy chickens before handling so that it can affect the productivity of chicken farmers. Therefore, a technology is needed that can supervise and monitor chickens by paying attention to disease symptoms including chicken movement [2] and changes in chicken behavior [3] directly on each chicken in the farm. By utilizing the use of webcams integrated with image processing, monitoring, and monitoring in identifying sick chickens will be very easy to do.
Image processing is a domain within computer science and engineering that focuses on the manipulation and analysis of visual data to produce meaningful outputs. This process involves converting raw image inputs into enhanced images that reveal specific features and provide actionable information [4, 5]. The fundamental goal of image processing is to extract relevant information from images, which can then be utilized to make informed decisions or improve existing processes.
In recent years, the integration of image processing techniques into the field of animal health and welfare has demonstrated significant potential. This integration is driven by the need for more effective methods to monitor and manage animal health, behavior, and growth. For example, image processing technologies are increasingly employed to detect early signs of diseases in animals, which can facilitate timely intervention and treatment. Additionally, these technologies enable continuous monitoring of animal behavior and growth patterns, providing valuable data that can inform better management practices. Furthermore, image processing contributes to the advancement of farm management by optimizing various operational aspects, ultimately enhancing productivity and ensuring the welfare of animals [6].
Among the numerous image processing algorithms available, YOLO (You Only Look Once) stands out as a highly effective model renowned for its speed and accuracy in object detection [7]. YOLO's framework revolutionizes the approach to object detection by leveraging a single convolutional neural network to predict both bounding boxes and class probabilities simultaneously. This architecture enables real-time performance, making YOLO an ideal choice for applications requiring rapid and precise object identification.
In this study, we introduce a novel application of YOLO for the detection of sick chickens in poultry farms, utilizing the latest iteration of this model-YOLO version 8 (YOLOv8). YOLOv8 represents a significant advancement in the YOLO series, incorporating several enhancements that address limitations observed in its predecessors. Specifically, YOLOv8 is designed to provide superior performance in terms of accuracy, speed, and robustness, making it particularly suitable for complex and dynamic environments. The YOLOv8 algorithm builds upon its predecessors by integrating improved network architectures and advanced training techniques. It enhances the model's ability to handle multiple object classes, manage occlusions, and accommodate varying object sizes and orientations. These improvements translate to more reliable detection capabilities in real-world scenarios, where the appearance of objects can be diverse and unpredictable [8, 9].
The main challenge of using image processing for sick chicken detection is to deal with the high variability and complexity of the images captured in poultry farms. The images may contain different types of chickens, such as broilers, layers, or breeders, with different colors, shapes, and sizes. The images may also have various backgrounds, lighting conditions, and noises. Moreover, the images may show different signs of diseases or injuries in chickens, such as feather loss, skin lesions, lameness, or respiratory distress [10-12]. To address this challenge, we propose a method that uses YOLOv8 to detect a sick and dead chicken. We also propose a custom dataset of chicken images collected from poultry farms, annotated with bounding boxes and labels for sick and healthy chickens.
The application of computer vision for the detection of animal behavior, health, and welfare has been extensively explored and developed. This section includes an overview of select literature crucial to this domain.
Research by employing a dual-function camera positioned above the fenced area and simultaneously taking thermal and visible footage of the broilers for 20 minutes at each stocking density was conducted by Muvva et al. [13]. This method demonstrates that the accuracy of mortality detection was 90.7% for the regular stocking density and 95% for the low stocking density, respectively, for 5-week-old or younger broilers. The accuracy was reduced for older broilers due to smaller body-background temperature gradients and higher body interactions among chickens.
In 2021, Bao et al. [14] proposed a sensor detection method based on artificial intelligence to identify dead and sick chickens in large-scale farms. The method involves measuring the maximum displacement of chicken activity using foot rings and calculating the three-dimensional total variance to represent the chicken activity intensity. The sensing data from the foot rings is collected by a detection terminal through a ZigBee network. The state of the chicken (dead or sick) is then identified using a machine-learning algorithm. The method combines artificial intelligence with a sensor network, resulting in a high recognition rate and reduced operation cost. The system achieves an accuracy of 95.6% in identifying dead and sick chickens and reduces the cost of operation by 25% compared to manual inspection.
An alternative approach for detecting sick chickens on poultry farms utilizing image processing techniques was explored by Widyawati and Gunawan [15]. Who employed the YOLOv5 algorithm. In their study, the authors conducted extensive testing on a dataset comprising 4,333 images of chicken feces. The YOLOv5-based method demonstrated notable efficacy, achieving an impressive average accuracy of 89.2% in identifying sick chickens based on the analyzed fecal samples. The study highlighted several advantages of their proposed method. Notably, the implementation of YOLOv5 for this application has the potential to significantly reduce both the time and cost associated with manual inspections. By automating the detection process, the method facilitates quicker identification of health issues, enabling earlier intervention for affected chickens. This early detection is crucial for managing and mitigating the spread of diseases within poultry populations, thereby improving overall farm productivity and animal welfare. Widyawati and Gunawan [15] research underscores the practical benefits of integrating advanced image processing algorithms, such as YOLOv5, into routine farm management practices. Their work not only demonstrates the feasibility of employing machine learning techniques for health monitoring but also provides a valuable benchmark for subsequent studies aiming to enhance poultry health management through automated solutions.
In addition to the approaches discussed, Nguyen et al. [16] proposed an advanced method for detecting lesions and identifying diseases in chicken flocks by integrating Autoencoder technology with the YOLOv6 model. This innovative approach leverages a combination of deep learning techniques to enhance the accuracy and efficiency of disease detection in poultry. The methodology employed by Nguyen et al. involves analyzing disease-related images collected via sensors installed in the poultry environment. Their approach combines the Autoencoder-a type of neural network used for unsupervised learning and feature extraction-with YOLOv6, a state-of-the-art object detection model. The integration of these technologies aims to improve the model’s ability to identify and classify lesions and other disease indicators with high precision. The results from Nguyen et al.'s study demonstrated exceptional performance of their proposed method. Specifically, the model achieved a validation mean Average Precision (Val/mAP) of 99.15%, indicating an extraordinarily high level of accuracy in detecting and classifying disease-related features. Additionally, the hit rate, which measures the proportion of correctly identified instances, exceeded 90% on the test dataset. These metrics underscore the effectiveness of the combined Autoencoder and YOLOv6 approach in providing reliable and accurate disease detection in chicken flocks. Nguyen et al.'s research highlights the potential of advanced machine learning techniques to transform disease monitoring in poultry farming. Their results not only validate the efficacy of their proposed method but also set a new benchmark for the use of automated systems in improving poultry health management.
Detecting chicken heads is crucial for identifying chickens and assessing their health status. However, in real-world scenarios, the accuracy of detection and recognition is often significantly reduced, primarily due to the complex scale variations of chicken heads. Therefore, many studies have been applied to enhance the accuracy of the machine learning model especially using YOLO algorithms.
Although some related publications have been carried out for chicken health detection, the study about deep learning related applications especially on YOLO-based algorithm for image processing and detection are still an interesting issue to explore more reliable machine learning model [17]. Current methods, such as manual inspection, thermal imaging, and traditional machine learning approaches, often face significant challenges in terms of accuracy, real-time detection, scalability, cost, and automation. Manual methods are labour-intensive and prone to human error, while thermal imaging and other technologies may be prohibitively expensive and not scalable for larger operations. Additionally, some machine learning approaches lack the real-time capabilities needed for effective monitoring in large broiler farms [18]. Our study addresses these shortcomings by leveraging the YOLO (You Only Look Once) algorithm, which offers significant advantages in real-time detection, high accuracy, and cost-effectiveness. This study is enhanced the application of the related study. In addition, the utilization of YOLOv7 is lack of discussion recently. Thus, our main contribution of this study is applied YOLOv8 to improve the detection accuracy of the chicken health condition.
In this section, we describe the design of our system, which consists of three main components: a camera module, a processing module, and a display module. We also explain how we implement the YOLO algorithm on our system, which enables the detection of objects in real time.
3.1 System design
In developing a chicken health detector, the system will be described in the following block diagram:
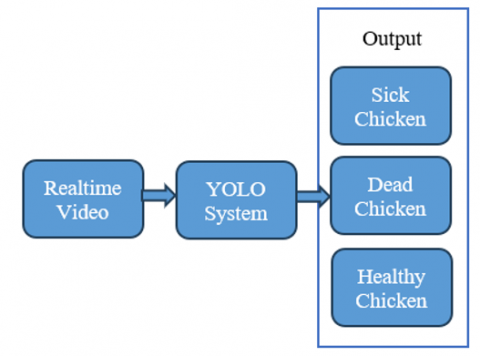
Figure 1 illustrates the system block diagram, which is structured into three primary components: input, process, and output. This diagram represents the workflow of the chicken health detection system designed to classify chickens as sick, dead, or healthy using real-time video feeds.
The input stage involves capturing real-time video footage of chickens using a webcam. This live video feed provides a continuous stream of images that are essential for monitoring the health status of chickens within the poultry environment.
During the processing stage, the captured video is analyzed by a chicken health detection system. This system employs the YOLO (You Only Look Once) image processing algorithm to perform real-time object detection. YOLO is utilized to identify and classify chickens based on their health status. The system processes the video frames to detect and differentiate between sick, dead, and healthy chickens. YOLO's advanced object detection capabilities enable the system to draw bounding boxes around each chicken, tagging them with appropriate health status labels.
The output of the system consists of annotated video footage that reflects the health status of the chickens. The processed video will display bounding boxes around each chicken, with labels indicating whether a chicken is sick, dead, or healthy. This visual information aids in the quick and accurate assessment of the poultry flock's health, supporting timely interventions and management decisions.
Figure 1. System block diagram
3.2 YOLO implementation
The implementation of YOLO will be divided into several stages [19] including image pre-processing data collection and annotation, dataset sharing, label file creation, parameter setting, training, and model application using YOLO versions 7 and 8 for comparison, which can be explained in detail as follows:
3.2.1 Dataset collection and annotation
For the implementation of YOLO (You Only Look Once) algorithms, the dataset collection process involves gathering raw images of objects-in this case, chickens-along with their corresponding labels [20]. This process is critical for training the model to accurately detect and classify objects within images. The dataset for YOLO implementation will consist of a substantial number of chicken images that are manually collected from the poultry environment. Each image is meticulously annotated to include labels that identify the presence and location of chickens, which are essential for the model’s learning process. The annotation involves drawing bounding boxes around the chickens and assigning appropriate labels to these boxes, thereby creating a comprehensive dataset that accurately reflects the visual features the YOLO model will need to recognize.
Figure 2 illustrates an example of the dataset before preprocessing, showcasing the raw images along with the preliminary annotations. This visual representation underscores the importance of accurate and detailed labelling in creating a robust dataset. Proper annotation ensures that the YOLO algorithm can be effectively trained to detect and identify chickens in various conditions and scenarios, leading to improved detection performance in real-world applications.
Figure 2. Example of dataset
3.2.2 Preprocessing
The preprocessing stage is a critical step in preparing the dataset for model training, ensuring that the data is in an optimal format for the YOLO algorithm. This stage encompasses several key processes aimed at enhancing the quality and consistency of the dataset [21].
One of the primary tasks in preprocessing is image normalization. This process involves resizing all images to a uniform dimension, which is essential for the effective training of the YOLO model. Resizing ensures that the input images are of consistent size, which is crucial for the algorithm to learn and generalize from the data efficiently. Uniform image dimensions help in maintaining the model's performance across various image scales and aspects, ultimately leading to more accurate detection results.
In addition to resizing, image normalization may also include other adjustments, such as scaling pixel values to a standard range or applying transformations to balance the dataset. These preprocessing steps collectively enhance the quality of the input data, facilitating better model performance and more reliable detection outcomes [22].
3.2.3 Dataset subset division
The dataset will be divided as shown in Figure 3 into three subsets: training data, validation data, and testing data. Training data will be used to train the YOLO model, validation data for parameter optimization and early stopping, and testing data will be used to test the performance of the model.
YOLOv8 requires a file label in the appropriate format. Each line in the file label contains information about the object in the image, including the object class and the coordinates of the box surrounding the object as shown in Figure 4.
Figure 3. Dataset subset division
Figure 4. File label
3.2.4 Hyperparameter validation and tuning
Dataset validation is used to test the performance of the model on data not used in training. The validation results are used to tune the hyperparameters. In this project, an epoch of 50 is used. The data preprocessing involved applying image augmentation techniques, including rotation, scaling, and flipping, to enhance model robustness. The dataset was annotated manually using bounding boxes to label sick and dead broilers, with images captured at a resolution of 1080p to ensure clarity in detection. The data was then divided into 80% for training and 20% for testing to maintain a balanced representation of all classes. Model training was conducted in a Python environment using the PyTorch framework on an NVIDIA GPU, optimizing for speed and efficiency. Key hyperparameters, such as the learning rate, batch size, and IoU threshold, were carefully fine-tuned to achieve optimal detection accuracy.
3.2.5 Training
The training stage is a stage in model learning that produces the last.pt and best.pt from yolo which is the result of the training process checkpoint. Last.pt is the result of the last checkpoint and can be used to continue training from the last time training was done. Best.pt is the best validation of validation loss where the model displays the best of the training that has been done.
3.2.6 Model application
The application of the best.pt generated from the training dataset will be applied through YOLO using the library detection predictor, where the model of the YOLO application is the best.pt that has been generated previously with source "0" or is an external webcam which is then directed at the chicken image in real-time [20].
3.2.7 Model performance
Model performance is implemented using the confusion matrix method, the confusion matrix consists of being represented based on the True Positive, False Positive, False Negative, and True Negative values. The confusion matrix can produce an accuracy value to determine the accuracy of the classification model used can be calculated using Eq. (1).
$Accuracy=\frac{T P+T N}{T P+T N+F P+F N}$ (1)
4.1 Confusion matrix
4.1.1 YOLOv8
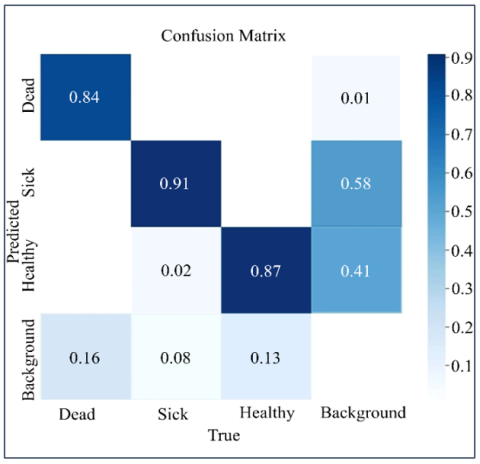
The results of the application of YOLOv8 have obtained model evaluation results using a confusion matrix as shown in the following Figure 5.
The result of the evaluation of all variables used from dead, sick, and healthy chickens. Based on the confusion matrix, the F1 rate is 94%, Precision 100%, Confidence 89.2%, Recall-Confidence 100%, and Precision-Recall 97% mAP@0.5. The accuracy of each variable can be described following the calculation formula that uses the values TP (True Positive), FP (False Positive), TN (True Negative), and FN (False Negative).
Based on Table 1, it can be seen that the value of TP is 0.85, FP is 1, FN is 0.16 and TN is 2 so that accuracy can be calculated according to Eq. (2).
$\frac{T P+T N}{T P+T N+F P+F N}=\frac{0.85+2}{0.85+2+0.16+1}=71.25 \%$ (2)
Figure 5. Confusion matrix of YOLOv8
Table 1. Confusion matrix variable of dead chicken
|
|
Actual |
||
|
Dead |
Not Dead |
||
|
Prediction |
Dead |
0.85 |
1 |
|
Not Dead |
0.16 |
2 |
|
Table 2. Confusion matrix variable of sick chicken
|
|
Actual |
||
|
Sick |
Not Sick |
||
|
Prediction |
Sick |
1 |
0.08 |
|
Not Sick |
0 |
2.93 |
|
Table 3. Confusion matrix variable of healthy chicken
|
|
Actual |
||
|
Dead |
Not Dead |
||
|
Prediction |
Dead |
0.85 |
1 |
|
Not Dead |
0.16 |
2 |
|
Based on Table 2, it can be seen that the value of TP is 1, FP is 0.08, FN is 0 and TN is 2.93 so that accuracy can be calculated with Eq. (3).
$\frac{T P+T N}{T P+T N+F P+F N}=\frac{1+2.93}{1+2.93+0+0.08}=98.25 \%$ (3)
Based on Table 3, it can be seen that the value of TP is 0.85, FP is 1, FN is 0.16 and TN is 2 so that accuracy can be calculated in Eq. (4).
$\frac{T P+T N}{T P+T N+F P+F N}=\frac{1+2.93}{1+2.93+0+0.08}=98.25 \%$ (4)
The calculation results of each variable obtained accuracy for healthy and sick chickens at 98.25% and dead chickens at 71.25%.
4.1.2 YOLOv7
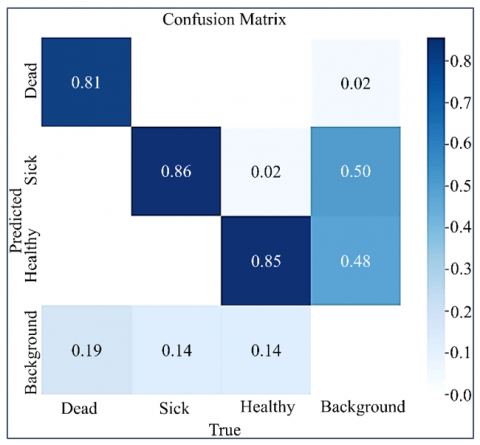
The results of implementing the YOLOv7 algorithm obtained the following confusion matrix with accuracy results for healthy chickens 75%, and sick chickens 46% as shown in Figure 6.
Figure 6. Confusion matrix of YOLOv7
4.2 Chicken health detection
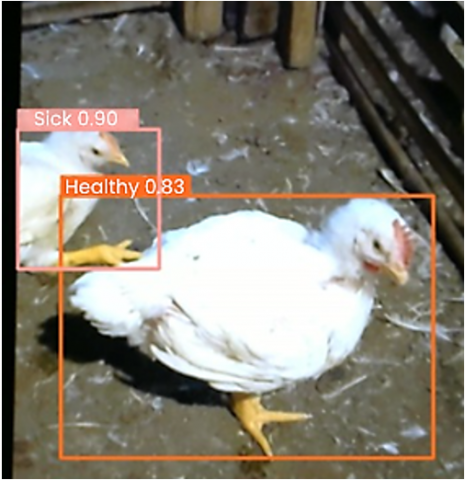
The examination of chicken videos and images was carried out for the detection of healthy, sick, and dead chickens as shown in the following Figure 7 and Figure 8 using YOLOv8 which obtained better accuracy results compared to YOLOv7.
Figure 7. Sick and healthy chicken
Figure 8. Dead chicken
While our YOLOv8 model achieved high accuracy and F1 scores, certain misclassifications were observed, particularly in images with challenging conditions such as poor lighting or complex backgrounds. Under low-light conditions, the model sometimes struggled to distinguish between healthy and sick broilers due to reduced image clarity. Additionally, backgrounds with clutter or overlapping broilers occasionally led to false positives, where healthy broilers were incorrectly identified as sick. These misclassifications could be attributed to the reduced contrast between the broilers and their surroundings, which affects the model’s ability to detect subtle visual cues. To mitigate these issues, future work could explore advanced data augmentation techniques and fine-tuning of the model to better handle varying environmental factors.
In this study, the detection of sick and dead chickens was evaluated using the YOLOv7 and YOLOv8 algorithms. The performance of these algorithms was assessed through the confusion matrix method, which provides a comprehensive measure of the algorithms' accuracy and effectiveness. The YOLOv7 algorithm demonstrated an F1 score of 78% and a precision of 63%. These metrics indicate that while YOLOv7 performs adequately in detecting sick and dead chickens, its performance is not as robust compared to newer iterations of the YOLO model. The YOLOv8 algorithm, in contrast, exhibited significantly improved performance metrics. Specifically, YOLOv8 achieved an F1 score of 94% and a precision of 100%. Additionally, the confidence level for YOLOv8 was recorded at 89.2%, with a recall-confidence of 100% and a Precision-Recall of 97%. The mean Average Precision (mAP) at an Intersection over Union (IoU) threshold of 0.5 was 97%. These results underscore YOLOv8's superior ability to accurately detect and classify sick and dead chickens.
The performance of YOLOv8 across different categories was notably high, with accuracy rates of 71.25% for dead chickens, 98.25% for sick chickens, and similarly high accuracy for healthy chickens. The algorithm's enhanced precision and recall metrics make it particularly effective for applications requiring detailed health monitoring of poultry. Based on the comparative analysis, YOLOv8 demonstrates a markedly better level of performance for detecting sick and dead chickens in video and image data. The improved accuracy, precision, and recall metrics of YOLOv8 make it the preferred choice for this application. The system effectively utilizes YOLOv8 to provide real-time detection and classification of chickens, displaying health status through bounding boxes on images and video feeds.
Although the YOLOv8-based detection system demonstrates promising results for detecting sick and dead broilers, there are areas that require further improvement. One limitation is the system’s performance across different chicken species, where variations in physical characteristics may affect detection accuracy. Additionally, the system’s robustness in complex environments, such as varying lighting conditions, occlusions, and cluttered backgrounds, needs enhancement. Future work should focus on improving model generalization through species-specific training, expanding the dataset to include diverse environmental scenarios, and applying more advanced data augmentation techniques. These optimizations will enhance the adaptability and accuracy of the system in real-world applications, ensuring more reliable performance across varying conditions.
This work is supported by the University of Muhammadiyah Malang (Grant No.: E.2.a/811/BAA-UMM/VIII/2023), trough UMM-internal research and community services grant. The authors acknowledge the Capstone team; Cahya Dwiki, Fahmi A., M. Iqbal., and M. Rizki, for their contributions to undertake this project.
|
YOLO |
You Only Look Once |
|
mAP |
Mean Average Precision |
|
F1 |
The harmonic means between precision and recall scores |
[1] Vanany, I., Maftuhah, D.I., Jaelani, L.M., Hajar, G., Utami, N.M.C. (2019). Modeling of chicken production for food security in Indonesia. In 2019 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Macao, China, pp. 627-631. https://doi.org/10.1109/IEEM44572.2019.8978877
[2] He, P., Chen, Z., Yu, H., Hayat, K., He, Y., Pan, J., Lin, H. (2022). Research progress in the early warning of chicken diseases by monitoring clinical symptoms. Applied Sciences, 12(11): 5601. https://doi.org/10.3390/app12115601
[3] Li, N., Ren, Z., Li, D., Zeng, L. (2020). Automated techniques for monitoring the behaviour and welfare of broilers and laying hens: Towards the goal of precision livestock farming. Animal, 14(3): 617-625. https://doi.org/10.1017/S1751731119002155
[4] Acharya, T., Ray, A.K. (2005). Image Processing-Principles and Applications. John Wiley & Sons, Wiley-Interscience.
[5] Petrou, M.M., Petrou, C. (2010). Image Processing: The Fundamentals. John Wiley & Sons.
[6] Nilsson, M., Herlin, A.H., Ardö, H., Guzhva, O., Åström, K., Bergsten, C. (2015). Development of automatic surveillance of animal behaviour and welfare using image analysis and machine learned segmentation technique. Animal, 9(11): 1859-1865. https://doi.org/10.1017/S1751731115001342
[7] Redmon, J. (2016). You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 779-788. https://doi.ieeecomputersociety.org/10.1109/CVPR.2016.91
[8] Terven, J., Córdova-Esparza, D.M., Romero-González, J.A. (2023). A comprehensive review of YOLO architectures in computer vision: From YOLOv1 to YOLOv8 and YOLO-NAS. Machine Learning and Knowledge Extraction, 5(4): 1680-1716. https://doi.org/10.3390/make5040083
[9] Hussain, M. (2023). YOLO-v1 to YOLO-v8, the rise of YOLO and its complementary nature toward digital manufacturing and industrial defect detection. Machines, 11(7): 677. https://doi.org/10.3390/machines11070677
[10] Zhuang, X., Zhang, T. (2019). Detection of sick broilers by digital image processing and deep learning. Biosystems Engineering, 179: 106-116. https://doi.org/10.1016/j.biosystemseng.2019.01.003
[11] Okinda, C., Nyalala, I., Korohou, T., Okinda, C., Wang, J., Achieng, T., Wamalwa, P., Mang, T., Shen, M. (2020). A review on computer vision systems in monitoring of poultry: A welfare perspective. Artificial Intelligence in Agriculture, 4: 184-208. https://doi.org/10.1016/j.aiia.2020.09.002
[12] Abd Aziz, N.S.N., Daud, S.M., Dziyauddin, R.A., Adam, M.Z., Azizan, A. (2020). A review on computer vision technology for monitoring poultry Farm-Application, hardware, and software. IEEE Access, 9: 12431-12445. https://doi.org/10.1109/ACCESS.2020.3047818
[13] Muvva, V.V., Zhao, Y., Parajuli, P., Zhang, S., Tabler, T., Purswell, J. (2018). Automatic identification of broiler mortality using image processing technology. American Society of Agricultural and Biological Engineers. https://doi.org/10.13031/iles.18-034
[14] Bao, Y., Lu, H., Zhao, Q., Yang, Z., Xu, W., Bao, Y. (2021). Detection system of dead and sick chickens in large scale farms based on artificial intelligence. Mathematical Biosciences and Engineering, 18(5): 6117-6135. https://doi.org/10.3934/mbe.2021306
[15] Widyawati, W., Gunawan, W. (2022). Early detection of sick chicken using artificial intelligence. Teknika: Jurnal Sains dan Teknologi, 18(2): 136-141. https://doi.org/10.36055/tjst.v18i2.17337
[16] Nguyen, K.H., Nguyen, H.V.N., Tran, H.N., Quach, L.D. (2023). Combining autoencoder and YOLOv6 model for classification and disease detection in chickens. In Proceedings of the 2023 8th International Conference on Intelligent Information Technology, Da Nang, Vietnam, pp. 132-138. https://doi.org/10.1145/3591569.3591591
[17] Ngo, T.Q., Toan, N.D., Le, L.H., Nguyen, T.D., Nguyen, H. (2023). An examination of advances in multistage object detection techniques utilizing deep learning. Mathematical Modelling of Engineering Problems, 10(5): 1587-1610. https://doi.org/10.18280/mmep.100510
[18] Marin, R.H., Caliva, J.M., Kembro, J.M. (2024). Dynamics of changes in broiler spatial distribution induced by a robot with autonomous navigation along the growing cycle. Poultry Science, 103(6): 103710. https://doi.org/10.1016/j.psj.2024.103710
[19] Diwan, T., Anirudh, G., Tembhurne, J.V. (2023). Object detection using YOLO: Challenges, architectural successors, datasets and applications. Multimedia Tools and Applications, 82(6): 9243-9275. https://doi.org/10.1007/s11042-022-13644-y
[20] Bathija, A., Sharma, G. (2019). Visual object detection and tracking using yolo and sort. International Journal of Engineering Research Technology, 8(11): 345-355. https://doi.org/10.0.68.169/IJERTV8IS110343
[21] Tong, Q., Zhang, E., Wu, S., Xu, K., Sun, C. (2023). A real-time detector of chicken healthy status based on modified YOLO. Signal, Image and Video Processing, 17(8): 4199-4207. https://doi.org/10.1007/s11760-023-02652-6
[22] Adebayo, S., Aworinde, H.O., Akinwunmi, A.O., Alabi, O.M., Ayandiji, A., Sakpere, A.B., Adeyemo, A., Oyebamiji, A.K., Olaide, O., Kizito, E. (2023). Enhancing poultry health management through machine learning-based analysis of vocalization signals dataset. Data in Brief, 50: 109528. https://doi.org/10.1016/j.dib.2023.109528