Rajanikanth Aluvalu![]() | Revathi Venkatachalam
| Revathi Venkatachalam![]() | Uma Maheswari Viswanadhula
| Uma Maheswari Viswanadhula![]() | Rajamani Jayadharmarajan Anandhi
| Rajamani Jayadharmarajan Anandhi![]() | MVV Prasad Kantipudi*
| MVV Prasad Kantipudi*![]() | Sai Prashanth Mallellu
| Sai Prashanth Mallellu![]()
© 2024 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
In order to facilitate effective communication between the V2V infrastructure, Vehicular Ad hoc Networks (VANETs) are utilized. Problems with routing, security, and node management are now plaguing VANETs that use vehicle-to-vehicle communication. New avenues for investigation into VANET routing, security, and mobility management have opened up because to intelligent transportation systems. Optimal routing for targeted traffic scenarios is one of the main issues in VANETs. Because VANET vehicles are constantly moving at high speeds, traditional protocols like AODV, OLSR, and DSDV are not suitable for this network. In a similar vein, swarm intelligence routing algorithms like Ant Colony Optimization (ACO) and Particle Swarm Optimization (PSO) have had some success in optimizing routing in VANET scenarios involving dense, sparse, and realistic traffic. Furthermore, most metaheuristics methods have issues with slow convergence speed, premature convergence, and becoming stuck in local optima. Hence, a new metaheuristic approach to selecting the cluster head is suggested in the study, which employs an improved wild horse optimization algorithm (IWHO). The social behaviour of wild horses served as an inspiration for the development of IWHO. The ethics of the horse informed the proposed approach. The next step is to cluster the vehicles according to the reliability of linkages criteria. Subsequently, a maintenance phase is suggested for the purpose of redistributing vehicles within the clusters and updating the cluster heads. Lastly, a MATLAB simulation is run on a real-life urban setting to assess the efficacy of the proposed strategy. A 76% decrease in change rate is indicative of improved stability, while a 37% rise in throughput and a 19% decrease in average latency are indicators of improved performance.
vehicular ad hoc networks, improved wild horse optimization algorithm, ad hoc on-demand distance vector, cluster head selection, optimized link state routing
For millions of individuals worldwide, their primary mode of mobility is an automobile. As this mode of transportation becomes more and more popular, it will be crucial to permit vehicle-to-vehicle communication in order to provide passengers with more security and entertainment alternatives. The proliferation of personal automobiles, along with worsening traffic conditions and other risk factors, has raised the probability of accidents [1]. Software that aids the driver in making decisions and guarantees the safety of all passengers was developed in response to these issues. Improving fuel economy, reducing pollution, and helping the vehicle avoid traffic jams are further advantages [2]. In the entertainment sector, setting up a communication system between automobiles might have numerous advantages, such as the ability to exchange media (such as music and movies), make it easier for passengers to engage with other cars, other vehicles, and information kiosks at the roadside, and many more. One possible solution to the problem of inter-vehicle communication is the implementation of VANETs [3]. Disconnection from preexisting infrastructure is a defining characteristic of ad hoc networks [4]. The similar idea underpins vehicular ad hoc networks, which link tiny, battery-operated devices using radio waves.
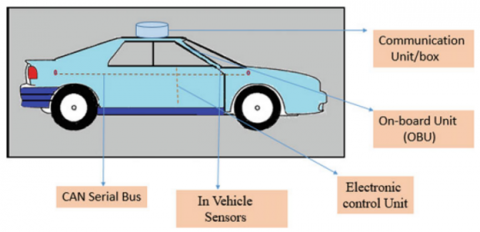
Academic interest in vehicular ad hoc networks has been on the rise in the last few years. Reason being, VANET is crucial for fixing traffic and safety problems, boosting system performance generally, and ITS entertainment features [5]. Quick advancements in communication, electricity, and computer have enabled VANET to flourish. Transforming vehicles into data-gathering, -transmitting, and -displaying smart transport systems is the ultimate aim of Vehicle-to-V2V networks [6]. In order for a network node to establish a connection with another node in the same vehicle, both nodes must be physically close by. A vehicle node's usual communication range may be exceeded if it is required to connect with another vehicle node [7]. Data may be transported from one network node to another, independent of the position of the vehicle (the "source node"), by associating with intermediate nodes within transmission ranges and finding a way to connect with both the source and destination nodes [8]. Figure 1 shows the basic layout of the smart vehicle system.
Figure 1. Smart vehicle structure
Some problems and drawbacks with VANET include multipath fading and road obstructions, traffic jams, fluctuations in vehicle speed and mobility, road topography, traffic diversion models, drivers' erratic conduct on the road, and so on [9]. In order to establish dependable network services, it is necessary to address the numerous issues with VANET. Consequently, a key challenge in VANET is ensuring stable and dependable routeing. Consequently, it is necessary to use correct approaches in actual traffic scenarios as well [10]. Even more difficult is routeing in VANET due to the vehicle's dynamic nature and high mobility speed. Therefore, the most difficult part is choosing a VANET routeing protocol, which falls into one of five distinct groups defined by their unique routeing characteristics.
1.1 Bioinspired algorithms in VANET networks
The present ITS has been fortified and performance has been enhanced by VANETs and their many uses and capacities [11]. The use of VANET technology has, however, brought forth a slew of other problems. A great deal of research in this area has concentrated on space management, safety, and routing, the three cornerstones of vehicle networks. Clustering has been shown in several studies [12] to be an effective way to fix VANET's problems and make it more dependable and scalable in city settings. The process of sorting automobiles into fictitious groups called clusters is known as clustering [13]. Because of this, Cluster can improve the utilisation of network resources and provide safer, more reliable routing [14].
Current ITS frameworks have recently included bioinspired strategies to enhance them. The purpose of this research is to examine whether or not VANET networks may benefit from evolutionary approaches in order to address the following issues:
(1) Because animal behaviours in foraging for food and other needs are comparable to optimal route finding in VANET networks, algorithms that draw inspiration from nature operate better in these networks [15]. Optimising routes with little to no human involvement is also possible using algorithms inspired by nature. Algorithms developed from natural occurrences also make VANET networks more resilient and guarantee effective routing in many network conditions.
(2) Algorithms inspired by nature are well-suited to handle the large range of topological topologies observed in VANET networks due to their intrinsic flexibility and capacity for self-organization [16].
(3) They offer more accurate sensing of the network's damaged nodes since they integrate the greatest level of naturally inspired technology. By reducing the frequency of security attacks, it enhances the security of the network.
(4) Low complexity bioinspired techniques are advantageous for addressing VANET network computing problems.
1.2 Contribution of the research work
This paper suggests an intelligent enhanced wild horse optimisation to optimise clusters in VANET networks, based on the aforementioned benefits of bioinspired algorithms. The suggested techniques begin with vehicle searches and topology creation using self-adjusted weights to reduce inaccuracy. Next, cluster heads are selected for network administration in order to improve accuracy, taking into account each horse's specific fitness function. Presented above are the key points of the paper:
(1) A new intelligent IWHO for VANET network cluster optimisation is introduced in this study.
(2) The fitness function of each vehicle is used to assign a weight to each objective in an objective clustering.
(3) The suggested algorithm clearly offers a balance between exploration and exploitation. Because it remembers various answers and searches a large region to find the global solution, this feature allows IWHO to tackle a complex optimisation problem with numerous locally optimum solutions. Last but not least, the IWHO's combination of audible fine-tuning and gentle computations makes it the best and most novel method for optimising issues.
Here is how the balance of the paper is designed: In Section 2, the pertinent literature is reviewed; in Section 3, the system model is presented together with the suggested model; in Section 4, the consequences and discussion are given; and lastly, in Section 5, the conclusion is drawn.
To solve this problem, Choudhary and Pahuja [17] suggest employing the routing based on zones of VANET that zone-based routing that takes mobility into account. The routing technique is updated to adopt a hybrid optimization approach. A hybrid algorithm (ABC) combines the optimization of ant colonies (ACO) with the optimization of artificial bee colonies (ABCO). The fitness function is based on the stability of the links and the residual energy. Time, overhead, and delivery ratio are some of the metrics used to assess how well the proposed approach works. Evaluation of the proposed approach in relation to the performance of existing algorithms.
Al-dolaimy et al. [18] proposed an optimization method for VANET called HOIPS (Conscious hybrid optimization of the quality of the service to improve the selection of routes). This method of optimization is a combination of two: EWOA and Enhanced Optimization of Ant Colonies (ACO). To guarantee a successful communication in VANET, the algorithm EWOA is used for the selection of the optimal initial route and ACO to determine the most optimal solution. Compared to previous approaches, this method of optimization is also used in situations of low, medium and high density. When we tested the previous approaches in dense, low, and medium environments, we found that their rendering was unaffected. Even so, the performance degrades with time in an environment of high density. However, the proposed approach outperforms the alternatives in three tests and demonstrates effective communication for VANETs.
The novel routing protocol for VANET proposed by Ru et al. [19] is a novel routing protocol for junction selection in VANETs (Vehicular Ad-hoc Networks) represents a significant advancement by incorporating multiple attributes and optimizing weight values to enhance junction-selection accuracy. Our proposed method improves considerably the precision of the route options when considering the optimal weight assigned to each characteristic and the procedure to choose multiple characteristics. The results show a high gain in the packet delivery rate (PDR), along with a lower latency and a lower load on the network. We also provide a detailed comparison of the performance of the proposed protocol with competing protocols and an exhaustive study of its performance.
Husnain et al. [20] presented an optimization algorithm induced whales (p-WOA), which depend on groups Bioinspired and produces formation of groups Communication vehicle. The aptitude function was adjusted to take into account the probability of various characteristics, such as the range of communication, the number of nodes, the speed and the route of the road, which allowed us to minimize the uncertainty. Compared to existing approaches like Ant Lion Optimizer (ALO) and Gray Wolf Optimization (GWO), the new estrategia p-WOA produces the best sum of clusters. When compared with other two well-known approaches, ALO and GWO, the proposed technique achieves better results in latency, average performance and packet delivery rate (PDR). The statistical data presented in this investigation show that VANETs that use ITS applications significantly improve cluster optimization by a factor of 75. This optimization extends cluster life and reduces communication costs and general routing costs.
Madhubabu and Snehalatha presented an optimal strategy for route selection in VANETs [21]. For optimal route selection, it is necessary to log vehicle data between the starting point and the final destination. Following this, the data pertaining to traffic and movement is stored in the IoT. We start by listing every possible path. Next, the most suitable one is selected. To address this problem, a new hybrid optimisation model is presented, the Bat Hybridised Grey Wolf optimisation (BHGWO). Bat Optimisation and Grey Wolf Optimisation (GWO) are potentially combined in it. The convergence analysis of the acknowledged BHGWO model was computed using the standard procedures ACO, GA, GWO, CSA, and BOA, in that sequence. Aside from that, we counted 50, 100, 150, and 200 cars for the energy, congestion, and delay metrics, respectively, to measure how well it worked.
The objective of the new Intelligent Fuzzy Bald Eagle (IFBE) optimizer presented by Blessy and Brindha [22] is to enhance VANET performance by optimising cluster head selection (CHS). Based on the results of the experiments, the IFBE method is superior to other methods in use today in terms of energy use, ratio, and efficiency. The proposed method for optimising the CHS process makes use of an intelligent fuzzy system. Using a set of criteria and membership functions, the fuzzy system finds the nodes with the best qualifications to be the cluster leader. The Bald Eagle Search (BES) optimisation meta-heuristic method is used to determine the optimal values for. The proposed approach was validated using the MATLAB simulator. Finally, with a minimum latency of 13.58 ms and a clustering efficiency of 94.15% and reduced energy usage of 97.65%, respectively, the experimental findings showed that the IFBE approach performed better than the alternatives.
Azzoug and Boukra [23] provide swarm-inspired optimisation as a novel strategy for reducing data packet loss rate, based on a new concept of route stability. Using an IWD technique, we can keep an eye on the routing consistency of road segments in both the proactive and reactive modes. In order to progressively estimate the stability degree of inaccessible road portions, IWD seeks to gather accurate and current connection information. The second one is deduced using the known routing parameters, which include things like vehicle speeds, data forwarding, and prior route traffic. The goal of using these parameters to find straight JBR routes to data packet destinations is to mimic Dijkstra JBR pathways as much as possible, drawing inspiration from IWD, while minimising the number of disconnected road segments. We evaluate the proposed bio-inspired JBR protocol against existing popular JBR methods in this city-map scenario. A consistent mean PDR improvement ranging from 25.55% to 33.47 percent was seen in the majority of the simulated variants that were evaluated.
In an effort to improve the network's average throughput and routing stability, Naeem et al. [24] proposed an improved cluster-based lifetime technique named ECBLTR. In order to assess the cluster head (CH), parameters including concentration, local distance, node degree, residual energy, and distance from the base station are fed into the Sugeno model fuzzy inference system. We show that, given a network size, VANET link performance may be increased with the correct channel design and an efficient routing method. Our research shows that the lifetime of networks can be improved by 10% and that the fuzzy system can be effectively used to pick CH. Furthermore, performance evaluation reveals the impacts of various network sizes and routing approaches on average transmission and packet loss.
A cluster-based routing algorithm that draws inspiration from biology is proposed by Husnain et al. [20] and is dubbed the intelligent, probability-based, and nature-inspired algorithm. Clusters are formed in vehicle communication via this approach. A variety of parameters were examined and included into the fitness function, including gearbox range, number of nodes, speed, and highway route. The result was a less chaotic system. In comparison to existing approaches, such as ALO and GWO, the novel p-WOA method produces the optimal number of cluster heads (CH). After comparing the proposed approach to two popular ones, ALO and GWO, we discovered that it outperforms them in terms of average throughput and latency. This research provided statistical proof that VANETs using ITS applications enhance their clusters by a factor of 75. This not only increases the cluster's endurance but also decreases communication costs and route overhead.
2.1 Problem statement
Ad hoc wireless and wired systems communicate numerous bits of information via VANETs. It was also similar to earlier systems in that it had a number of distinguishing features. With these outstanding features, routeing protocol design has been able to go above and beyond the typical wired and wireless ad hoc appointed systems. Even if there is a distinct challenge in fulfilling the requirements of the strategy. Extreme energy consumption, low-level computation, and the constantly changing environment inside communication sensors are all factors that contribute to the problems. Nodes in a VANET operate with extremely low levels of computational power, memory, and communication capacity while using an enormous amount of energy. The vast array of potential sensor applications means that VANET density can range from severely lacking extremely high. Furthermore, VANET nodes may be deployed ad hoc and unsupervised, and their number can be endless in many applications. As a result, VANETs can span large regions. Nodes in a VANET communicate in a way that is both dynamic and adaptable. Because of their current location or the lack of energy consumption, VANET nodes are constantly changing their behaviour to comply with the nodes' requirements for self-organization and energy conservation. In addition, VANET nodes may need to adjust their behaviour to combat severe performance deterioration due to the unpredictable and variable behaviour of wireless networks.
This research filled a knowledge gap that had been previously identified by a literature analysis and background investigation. The current VANET routeing system has issues, such as the fact that classical and meta-heuristic algorithms can't handle the routeing difficulties of today. Therefore, a system model to fix routeing problems in different types of traffic is presented in this study. Subsequent sections elaborated on the research's communication model and methods.
3.1 Communication model
In this study, he opted for the optimization of routes using communication networks from vehicle to vehicle. The problems with routing, security and node management now affect VANETs that use vehicle-to-vehicle communication. The rise of IT has opened up new ways of research on the routing, security and mobility management of VANET. Not all models of network communication are well-suited to these research difficulties. Consequently, this study introduces the suggested communication paradigm that works in VANETs with both sparse and dense traffic.
3.2 Parameter selection for cluster head
The statement asserts that utilizing an Improved Wild Horse Optimization (IWHO) algorithm for cluster head selection in Vehicular Ad-hoc Networks (VANETs) represents a novel approach that contributes new knowledge to the field, which is an innovative strategy that adds to the set of existing knowledge. Sin embargo, the veracity of this affirmation is difficult to verify in the absence of concrete tests or results of studies. In the framework of VANET research, the technique, the experimental configuration, the results and the comparison with the actual methods to determine the originality and the value of the IOMS algorithm for the selection of group heads in VANET should be examined. To add weight to the relevance of the suggested algorithm, it must be reviewed by peers and validated by the scientific community.
Several measures can be implemented to resolve this problem and improve the clarity and practicality of the methodology:
Detailed Parameter Description: Provide a comprehensive explanation of each parameter used in the methodology, including their roles, potential values, and impacts on the algorithm's performance. This ensures readers understand the significance of each parameter and how they affect the results.
Analyze the impact of changing parameter values on the performance of the algorithm by performing a sensitivity study. The objective of this study is to find the most important parameters and the best values for them in all possible situations and sets of data.
Parameter Tuning Guidelines: Offer guidelines or recommendations for parameter tuning based on experimental results or empirical observations. This could include strategies such as grid search, random search, or heuristic methods to find suitable parameter configurations.
3.2.1 Efficient energy consumption
The study uses a technique to evaluate the energy consumption efficiency of the Head of Clusters (HOCs) by calculating the total leftover energy. Whether the cumulative balance energy of the HOCs increases or decreases determines how well the approach performs overall. Every iteration, the node with the highest balancing energy is selected as the HOC node.
3.2.2 Reliability
The degree of confidence in data transmission is what the word "reliability" alludes to. Since WSN nodes run on batteries, reducing energy usage during data transfer can improve dependability. So, extending the life of the network and decreasing the cost of communication outside the cluster are both achieved by reducing energy consumption at the nodes. The sum of all costs incurred by non-cluster communication is known as the global cost of communication.
3.2.3 Energy consumption framework
Data transmission in the form of bits is the intended design of the energy consumption framework. For different network tasks involving communication with other nodes, it contains energy loss computations at each node. Both the octal-channel broadcasting method and the dual-channel broadcasting approach assess energy use during data transmission, with the latter also providing an estimate of energy loss during multi-hop data transfer. In mathematics, this framework is represented by Eq. (1).
$F^{S W}\{k, c\}=\prod\binom{k F^{s e l}-k F^{e t} c^{i+1},(c-1) \leftarrow c^i}{k F^{s e l}-k F^{n o} c^{i+4},(c+1) \leftarrow c^i}$ (1)
where, Fet is the loss of energy at the single hop, Fno is the loss of energy at multi-hop. Fsel is digital modulation, signalling, computerised coding, sorting, and other factors comprise the electrical energy. Eq. (2) mathematically expresses the hybrid separation as co, where c is the distance among the transmitter and receiver nodes.
$c^o=\int \frac{F^{e t}}{F^{n o}} \times \sum F^{s W}\left\{k, \sum c\right\}$ (2)
The energy spent by the vehicular sensor devices to receive the message FQW is exactly uttered as Eq. (3).
$F^{Q W}(k)=e^{\Sigma c} k F^{s e l}+\bigvee \frac{F^{e t}}{F^{n o}}$ (3)
So, the physical and medium access control layer of WSN is constructed to contain the energy spent during (i) message transmission and (ii) message reception.
3.3 Optimal selection of HOC
3.3.1 Wild horse optimizer (WHO)
The wild horse optimizer (WHO) method exactly mimics the social behaviour of wild horses in nature to solve optimisation problems [25]. Typically, a herd of horses will consist of a stallion and many mares and foals. Mating, grazing, chasing, controlling, and commanding are just a few of the behaviours they display. The following are the five stages of the WHO algorithm:
A). Generating an initial populace and creation horse groups and selecting leaders
A large sum of subsets is first created from the basic population. The algorithm's group count is G, and the population size is N. The method uses a stallion as the head of each group, with G being the number of stallions. The remaining populace, consisting of foals and mares, is distributed groups, with (N-G) being the difference.
B). Grazing behavior
The subsequent equation was projected to fake the grazing behavior:
$\begin{gathered}X_{i, G}^j=2 Z \cos (2 \pi R Z) \times\left(\text { Stallion }^j-X_{i, G}^j\right) + \text { Stallion }^j\end{gathered}$ (4)
where, $X_{i, G}^j$ denotes the current site of member, Stallionj is the stallion position, R is an unchanging stochastic sum from the range [-2,2], besides Z is the subsequent equation:
$\begin{gathered}P=\overrightarrow{R_1}<T D R ; I D X=(P==0) \\ Z=R_2 \Theta I D X+\vec{R}_3 \Theta(\sim I D X)\end{gathered}$ (5)
where, $P$ is a vector containing of 0 to $1, \overrightarrow{R_1}$ and $\vec{R}_3$ are a random sum from the variety [0,1], R2 is a sum from the range [0,1]. According to the subsequent equation, TDR is an adaptive parameter that begins at 1 and declines until it grasps 0 at the conclusion of the algorithm's implementation:
$T D R=1-i t \times\left(\frac{1}{\text { maxit }}\right)$ (6)
where, it is the present repetition and maxit is the extreme sum of iterations.
C). Horse mating behavior
As part of the mating process, a foal will move from group, and a foal from group j will do the same. It was suggested that the following Crossover operator of the mean type be used to model horse mating behaviour:
$\begin{gathered}X_{G, K}^P=\operatorname{Crossover}\left(X_{G, i}^q, X_{G, j}^Z\right) i \neq j \neq k, p=q=\text { end } \\ \text { Crossover }=\text { Mean }\end{gathered}$ (7)
D). Group leadership
The WHO algorithm depicts a herd's leaders, or stallions, guiding the rest of the herd to a watering site. In order to ensure that the dominant group uses this water source first, the stallions compete with one another for it. At this stage of the procedure, the following equation was suggested:
$\overline{\text { Stalllon }}_{G_i}$$=\left\{\begin{array}{c}2 Z \cos (2 \pi R Z) \times\left(W H-\text { Stallion }_{G_i}\right)+W H \text { if } R_3>0.5 \\ 2 Z \cos (2 \pi R Z) \times\left(W H-\text { Stallion }_{G_i}\right) -W H \text { if } R_3 \leq 0.5\end{array}\right.$ (8)
where, $\overline{\text { Stalllon }}_{G_i}$ is the subsequent site of the leader. WH is the hole.
E). Leader’s interchange and selection
Leaders are designated based on their fitness in the subsequent phases. According to this formula, the leader and the important member will switch places:
$\begin{aligned} & \overline{\text { Stallıon }}_{G_i} =\left\{\begin{array}{c}X_{G, i} \text { if } \cos t\left(X_{G, i}\right)<\cos t\left(\text { Stallion }_{G_i}\right) \\ \text { Stallion }_{G_i} \text { if } \cos t\left(X_{G, i}\right)>\cos t\left(\text { Stallion }_{G_i}\right)\end{array}\right.\end{aligned}$ (9)
3.3.2 Improved wild horse optimizer (IWHO)
The cuckoo search (CS) method is the foundation of the (IWHO) [26]. The following equation is used to produce new solutions throughout iterations of the proposed method, which utilises the Levy flight:
$\begin{aligned} & X_{i, G}=X_{i, G}-\gamma\left(X_{i, G}-X_g\right) \oplus \operatorname{Levy}(\lambda)=X_{i, G}+\frac{0.01 u}{|v|^{1 / \lambda}}\left(X_{i, G}-X_g\right)\end{aligned}$ (10)
where, Xi,G is the ith site, γ designates the phase scaling size, Xg designates the global best solution, the ⊕ mentions to multiplications, λ denotes to the Levy flight advocate, while u and v are well-defined as:
$u \sim N\left(0, \sigma_v^3\right), v \sim N\left(0, \sigma_v^2\right)$ (11)
The standard deviations σu and σv are expressed as:
$\sigma_{\mathrm{u}}=\left[\frac{\sin \left(\frac{\lambda \pi}{2}\right) \cdot \Gamma(1+\lambda)}{2^{(\lambda-1)} \lambda \cdot \Gamma\left(\frac{1+\lambda}{2}\right)}\right]^{1 / \lambda}, \sigma_v=1$ (12)
Eq. (6) is used to construct the new candidate solution, where Γ is function. One major benefit of this upgrade is that the suggested method can strike a better local exploitation. Lastly, it utilises a GA-based mutation method to solve the problem of quicker convergence, which is the same idea as in the study [27-29].
3.4 Cluster creation
Creating and grouping the cars into several clusters is the second step after selecting the cluster heads using the suggested technique. As an alternative to the conventional distance-based clustering, this method clusters nodes according to their link reliability (REL). Taking REL into account is important since it reveals how well data packets may be sent with little chance of link failure. This metric measures the robustness and efficiency of the system. The reliability of the connections between cars is not shown by their geometrical distance.
All nearby vehicles can receive ELECTED Messages sent by a CH. The ELECTED Message contains the following information on the cluster head: its ID, location, speed, and direction. The time when the cluster leader sends the ELECTED Message can be determined by examining the Life Time. In response to an ELECTED Message, every node k communicates with the CH sender by sending a JOIN Message. The message contains the following information about the node: its location, velocity, direction, and cluster head ID. Node k will conduct a test if it gets more than one ELECTED Message. CHs is calculated by node k. This node has sent the JOIN Message to indicate its intention to join the CH that has a higher REL value. A node k's reliability connection to a CH may be determined by applying the following formula.
$\begin{aligned} & R E L\left(\operatorname{link}_k, C H_i\right)=\operatorname{Erf}\left(\frac{\left(\frac{2 R}{t}-\mu_{\Delta v}\right)}{\sigma_{\Delta v} \sqrt{2}}\right) -\operatorname{Erf}\left(\frac{\left(\frac{2 R}{t}+T_p-\mu_{\Delta v}\right)}{\sigma_{\Delta v} \sqrt{2}}\right), \text { when } T_p>0\end{aligned}$ (13)
that is, the GAUSS error function is represented by Gerf. The fields of probability, statistics, and diffusion often make use of this particular integer function. Here is its definition:
$\operatorname{Erf}(x)=\frac{2}{\sqrt{\pi}} \int_0^Z e^{-t^2} d t$ (14)
where, µ and σ characterize speed correspondingly. ∆v designates the difference in speed among two vehicles.
Tp shows how long it is likely that a connection L between two cars will be accessible. Two scenarios are used to compute it:
Scenario 1: Equally vehicles transfer in the similar direction.
$T_p=\left\{\begin{array}{l}\frac{2 R+L_k, C H_i}{\left|V_k+V_{C H_i}\right|} \text { if the vehicles move towards each other } \\ \frac{R-L_k C H_i}{\left|V_k+V_{C H_i}\right|} \text { if the vehicles move towards each other }\end{array}\right.$ (15)
Scenario 2: The diverse directions.
$T_p=\left\{\begin{array}{l}\frac{2 R+L_k, C H_i}{\left|V_k+V_{C H_i}\right|} \text { if the vehicles move towards each other } \\ \frac{R-L_k C H_i}{\left|V_k+V_{C H_i}\right|} \text { if the vehicles move towards each other }\end{array}\right.$ (16)
The two vehicles' speeds are denoted by Vk and $V_{C H_i}$, respectively, and R is the area of gearbox. L is the distance in Euclidean terms between vehicles k and $V_{C H_i}$.
In order to exchange and retrieve the data needed for the formula, when the network is initialised, every vehicle broadcast HELLO packets to all of its nearby cars (13). Primarily, the HELLO packet structure includes the subsequent elements: preamble, life time, location, velocity, and direction.
The main phases in creating clusters are:
1) Apiece broadcasts HELLO mails to share flexibility info.
2) The CHi transmissions ELECTED communications to vehicles.
3) If vehicle k receives a solitary, it directly sends a JOIN message back to CHi to join the cluster.
4) When vehicle k gets more than one ELECTED message, it uses all of the available cluster heads to determine the REL value. The JOIN message is sent by vehicle k to the cluster head that has the highest REL value in order to join the cluster.
3.5 Cluster maintenance
When new vehicles enter or leave a cluster, the cluster heads will occasionally send ELECTED Messages to all accessible cars to structure. This is how the new vehicle might become a part of the cluster—by getting the ELECTED Message. Every vehicle that gets this kind of message works with the cluster head senders to calculate the REL value. The vehicle is eligible to join the cluster due to its high REL charge [30].
If any of the cluster heads decide to step down, the process for electing new leaders can be repeated.
The cluster keep phase deliberates three conceivable cases:
1. Cluster heads permission the cluster.
2. Vehicles leave the clusters.
3. Novel vehicles access the clusters.
At regular intervals, the cluster heads will transmit ELECTED Messages to all available cars in order to refresh the cluster structure whenever new vehicles join or depart the clusters. By receiving the ELECTED Message, the new car can join the cluster in this fashion. The REL value is computed by each vehicle that receives this sort of communication in conjunction with the senders of the cluster heads. The car's high REL value qualifies it to join the cluster.
It is possible to choose new cluster leaders by repeating the head election procedure in the event that any cluster heads resign.
1) Cluster Stability Performance Metrics
Cluster stability in VANETs is shown by a number of measures. Both the constancy of cluster leaders and members are included in these measurements.
A: Cluster Lifetime
- Cluster head lifetime: The lifespan of a vehicle head is the amount of time it stays in that role. An extended lifespan indicates that the clusters are quite stable. To get it, divide the total amount of time that cluster heads have been assigned roles by the total sum of roles in the cluster.
- Cluster member lifetime: The average term of being a member of a cluster is shown by the members lifespan. Cluster stability increases as this measure becomes longer. By isolating the total time of cluster role assignments by the total number of cluster role assignments, we may get the lifetime of each cluster member.
- Change rate of cluster head: The frequency with which a vehicle a certain time frame is represented by this measure. It is calculated by separating the sum of cluster heads assigned roles by a time period, often the duration of the simulation. This value decreases as clustering efficiency increases.
The complexity and unpredictability of real-world settings may be better captured by empirical validation on actual networks than by simulations, which may not provide a realistic representation of algorithm behaviour.
The term "empirical validation" refers to the process of testing the algorithm in real-world settings, collecting data, and evaluating its performance in various situations. Researchers may test the algorithm's resilience, scalability, and practicality using this method.
The statement claims that more testing on real networks is necessary to confirm the algorithm's effectiveness and applicability to (VANETs) and related domains, regardless of how promising the simulation results may be. With this form of verification, the reliability and validity of the study results will be enhanced.
Gather real-world network datasets that adequately portray the issue domain or application area that the approach is meant to address. The complexity and features of real-world networks should be captured in these databases.
Empirical Evaluation: Conduct empirical evaluations using the real-world datasets to assess the performance of the IWHO methodology in practical scenarios. This involves applying the methodology to the datasets and measuring relevant performance metrics such as clustering accuracy, scalability, robustness, and convergence speed.
4.1 Experimental set-up
The suggested scenario NS3.26 is simulated using an open-source programme for network simulation. Ubuntu with a Core i5 processor and 8 GB of RAM is the setup's default configuration. To evaluate the suggested approach, we rely solely on open-source software tools. Table 1 is shown the parameters used for the experimental analysis.
Table 1. Simulation parameters
|
Value |
Parameters |
|
2 Mbps |
Data sending rate |
|
UDP/CBR |
Routing agent |
|
35 km/h |
Extreme speed |
|
10 km/h |
Least speed |
|
300 |
Sum of data packets |
|
30 nodes/km |
Vehicle density |
|
50 nodes/km |
Jam density (blocked traffic) |
|
Manhattan mobility model |
Mobility perfect |
|
Dual |
Antenna |
|
MIMI (250m) |
Communication range |
|
Cognitive radios |
Spectrum scarcity |
|
(10-60) kmph |
Vehicular range speed |
|
20 (default) |
Pair |
|
512 bytes |
Packet size |
|
IEEE 802.11 MAC (11 Mbps) |
MAC |
|
Nakagami model |
Propagation model |
|
2000s |
Simulation time |
|
100 to 500 |
Nodes |
|
100 to 500 |
Wild horses |
4.2 Presentation metrics of communication
Throughput, latency, and packet transmission success are the metrics used to measure communication performance in VANETs. This is why four indicators are taken into account to ensure a comprehensive simulation:
-Packet delivery ratio (PDR): As a percentage, PDR shows how much of the network's traffic is packet-based. One way to get it is to divide the total sum of packs transmitted by the source nodes by the sum of packets received by the destination nodes.
- Average delay: Packet transmission latency is the average amount of one node to another.
-Throughput of clusters: It is the mean speed at which all of the network's clusters transmit packets. The total quantity of data transported clusters from all cars is divided by the transfer period to get it.
-Throughput of cluster head: One indicator of how well CH vehicles communicate is their throughput. The data transported across clusters during the transfer period is divided by this amount to get it.
4.3 Validation analysis of proposed model
4.3.1 Energy consumption
Table 2 presents the characterization of energy consumption measured in millijoules (mJ). In the analysis of GBTC 1.32 and at 100 nodes as and at 200 nodes as 1.34 1.39 and at 300 nodes as 1.4 and at 100 nodes as 1.44 correspondingly. Then CMBCA model reached the energy consumption at 400 nodes as 1.26 and at 100 nodes as 1.28 and at 100 nodes as 1.36 and at 200 nodes as 1.38 and at 100 nodes as 1.43 correspondingly. Then FCO model reached the energy consumption at 100 nodes as 1.11 and at 100 nodes as 1.14 and at 100 nodes as 1.23 and at 100 nodes as 1.16 and at 100 nodes as 1.34 correspondingly. Then PSO-GA model reached the energy consumption at 200 nodes as 0.78 and at 100 nodes as 1.01 and at 100 nodes as 1.08 and at 100 nodes as 1.15 and at 500 nodes as 1.08 correspondingly. Then Proposed IWHO model reached the energy consumption at 100 nodes as 0.61 and at 200 nodes as 0.74 and at 300 nodes as 0.87 and at 400 nodes as 0.93 and at 500 nodes as 0.99 correspondingly.
Table 2. Energy consumption (mJ)
|
No. of Nodes |
100 |
200 |
300 |
400 |
500 |
|
GBTC |
1.32 |
1.34 |
1.39 |
1.4 |
1.44 |
|
CMBCA |
1.26 |
1.28 |
1.36 |
1.38 |
1.43 |
|
FCO |
1.11 |
1.14 |
1.23 |
1.16 |
1.34 |
|
PSO-GA |
0.78 |
1.01 |
1.08 |
1.15 |
1.08 |
|
Proposed IWHO |
0.61 |
0.74 |
0.87 |
0.93 |
0.99 |
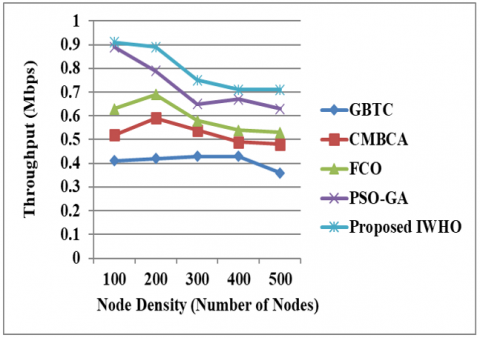
4.3.2 Throughput analysis
Figure 2 explains the visual representation of proposed model. When the node density is high, the throughput of the proposed model is high, when associated with existing techniques. But the nodes are reached high, the throughput is less even for proposed model.
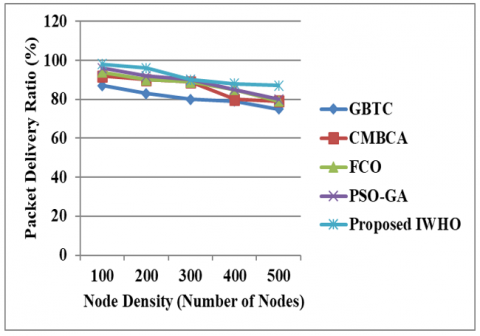
4.3.3 PDR
Figure 3 explains the visual representation of PDR. When comparing with all existing models, GBTC achieved very less PDR than CMBCA, FCO and PSO-GA. When the node reaches 500 densities, the GBTC achieved less than 80% of PDR, where the proposed perfect achieved nearly 87% of PDR. From this study, it is proving that the planned model achieved high presentation than present models.
4.3.4 Analysis of PLR
Table 3 characterizes that the Experimentation of projected model on PLR (%). In the study of GBTC model reached the PLR at 100 nodes as 14 and at 200 nodes as 14 and at 300 nodes as 15 and at 400 nodes as 15 and at 500 nodes as 19 correspondingly. Then CMBCA model reached the PLR at 100 nodes as 10 and at 100 nodes as 11 and at 100 nodes as 13 and at 100 nodes as 15 and at 500 nodes as 18 correspondingly. Then FCO model reached the PLR at 100 nodes as 7 and at 100 nodes as 9 and at 100 nodes as 10 12 and at 300 nodes as 16 correspondingly. Then PSO-GA model reached the PLR at 400 nodes as 4 and at 100 nodes as 6 and at 100 nodes as 9 and at 400 nodes as 10 and at 500 nodes as 11 correspondingly. Then Proposed IWHO model reached the PLR at 200 nodes as 1 and at 300 nodes as 2 and at 400 nodes as 5 and at 500 nodes as 6 correspondingly.
Table 3. Experimentation of proposed model on PLR (%)
|
No. of Nodes |
100 |
200 |
300 |
400 |
500 |
|
GBTC |
14 |
14 |
15 |
15 |
19 |
|
CMBCA |
10 |
11 |
13 |
15 |
18 |
|
FCO |
7 |
9 |
10 |
12 |
16 |
|
PSO-GA |
4 |
6 |
9 |
10 |
11 |
|
Proposed IWHO |
1 |
2 |
3 |
5 |
6 |
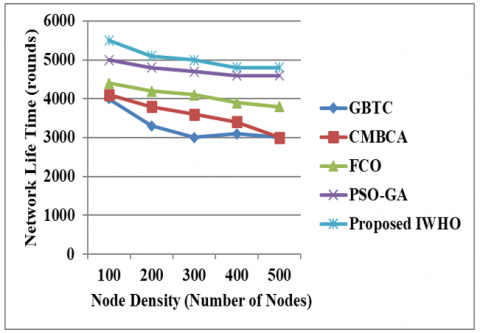
4.3.5 Network lifetime
Figure 4 explains the visual representation. When the node reaches 300, the GBTC achieved 3000 rounds, CMBCA achieved 3500 rounds, FCO achieved 4000 rounds, PSO-GA achieved 4780 rounds and finally, the proposed model achieved 5000 rounds.
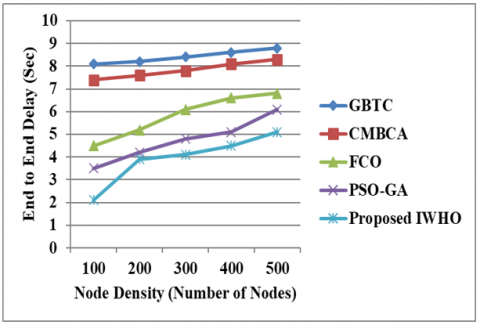
4.3.6 E2ED analysis
Figure 5 explains the visual representation of node’s delay. When compare with existing models, the proposed technique achieved less node delay and GBTC achieved high delay time. For example, the node reaches 300, the proposed model achieved 4s of delay, PSO-GA achieved 4.8s of delay, FCO achieved 6s of delay, CMBCA achieved 7.9s of delay and finally, the GBTC achieved 8.7s of delay.
Figure 2. Graphical illustration of proposed model
Figure 3. Visual representation of PDR
Figure 4. Graphical description of proposed model in terms of NLT
Figure 5. Visual representation of node’s delay
4.4 Discussion
However, to fully demonstrate the practical contributions of this integration, real-world deployment is crucial. Real-world deployment allows researchers to measure the feasibility, efficacy of swarm intelligence-based VANET solutions in actual urban environments or transportation networks. It provides valuable insights into how these techniques perform under real-world conditions, considering factors such as varying traffic patterns, environmental conditions, and communication constraints.
Moreover, real-world deployment enables stakeholders, vehicle manufacturers, and urban planners, to evaluate the practical benefits of swarm intelligence-based VANET applications firsthand. It facilitates the identification of potential challenges, usability issues, and areas for improvement, fostering iterative refinement and optimization of these solutions.
Improvements in VANET can offer reliable solutions for road safety, our lives will be changed forever. Because nodes in VANETS and other ad hoc networks are free to move around, the networks do not adhere to a rigid topology. Data transfer becomes critical in VANETs when nodes move around. Information on traffic or accidents may impact it. The high vehicle density in an urban setting makes routing a significant difficulty, with solutions based on clustering appearing in the literature. There is, nevertheless, room for improvement in the robustness of network structures that rely on clustering. This work proposes a clustered routing strategy that makes use of an upgraded wild horse optimisation algorithm to address this issue. In order to address the shortcomings of the old WHO, the International World Health Organisation (IWHO) was established to improve the balance between research and use and expedite algorithm convergence. The results show that compared to other comparative metaheuristic methods, the IWHO algorithm reduced the objective function more effectively. Based on the simulation consequences, it is clear that the IWHO is the best method out of the bunch. The outcomes validate the effectiveness of the suggested method in guaranteeing cluster stability and optimising routing. On the other hand, studies have shown that cluster efficiency may be even higher in densely populated areas, and that maintenance is the perfect time to use AI to handle complicated traffic models. Integrate the practical implications and theoretical contributions seamlessly with the key outcomes discussed in the conclusion. Emphasize how the identified outcomes directly relate to or support the practical applications and theoretical advancements discussed.
Use concrete examples or case studies to illustrate the potential real-world impact and theoretical significance of the research findings. In order to allay this worry, the conclusion ought to clearly state how the study's conclusions can be put to use in practical situations, emphasizing the advantages and possible effects on pertinent fields or industries. It should also highlight the new theoretical understandings or approaches that were discovered during the research and how important they are to expanding the corpus of knowledge already known in the field.
[1] Shah, Y.A., Aadil, F., Khalil, A., Assam, M., Abunadi, I., Alluhaidan, A.S., Al-Wesabi, F.N. (2022). An evolutionary algorithm-based vehicular clustering technique for VANETs. IEEE Access, 10: 14368-14385. https://doi.org/10.1109/ACCESS.2022.3145905
[2] Temurnikar, A., Verma, P., Dhiman, G. (2022). A PSO enable multi-hop clustering algorithm for VANET. International Journal of Swarm Intelligence Research (IJSIR), 13(2): 1-14. https://doi.org/10.4018/IJSIR.20220401.oa7
[3] Husnain, G., Anwar, S. (2021). An intelligent cluster optimization algorithm based on Whale Optimization Algorithm for VANETs (WOACNET). PLoS One, 16(4): e0250271. https://doi.org/10.1371/journal.pone.0250271
[4] Kokare, M.B., Kakkar, D. (2021). A survey on clustering algorithms for cluster-head selection in VANET. In 2021 Second International Conference on Electronics and Sustainable Communication Systems (ICESC), Coimbatore, India, pp. 992-996. https://doi.org/10.1109/ICESC51422.2021.9532807
[5] Kheradmand, B., Ghaffari, A., Soleimanian Gharehchopogh, F., Masdari, M. (2022). Clustering-based routing protocol using gray wolf optimization and technique for order of preference by similarity to ideal solution algorithms in the vehicular ad hoc networks. Concurrency and Computation: Practice and Experience, 34(23): e7209. https://doi.org/10.1002/cpe.7209
[6] Sabbagh, A.A., Shcherbakov, M.V. (2021). A hybrid clustering-based routing protocol for VANET using k-means and cuckoo search algorithm. In International Conference on Distributed Computer and Communication Networks, pp. 48-61. https://doi.org/10.1007/978-3-030-97110-6_4
[7] Konduru, S., Sathya, M. (2022). Remora optimization algorithm-based optimized node clustering technique for reliable data delivery in VANETs. International Journal of Intelligent Networks, 3: 74-79. https://doi.org/10.1016/j.ijin.2022.07.002
[8] Raja, M. (2021). PRAVN: Perspective on road safety adopted routing protocol for hybrid VANET-WSN communication using balanced clustering and optimal neighborhood selection. Soft Computing, 25(5): 4053-4072. https://doi.org/10.1007/s00500-020-05432-3
[9] Kandali, K., Bennis, L., El Bannay, O., Bennis, H. (2022). An intelligent machine learning based routing scheme for VANET. IEEE Access, 10: 74318-74333. https://doi.org/10.1109/ACCESS.2022.3190964
[10] Thirumalraj, A., Rajesh, T. (2023). An improved ARO model for task offloading in vehicular cloud computing in VANET. https://doi.org/10.21203/rs.3.rs-3291507/v1
[11] Javadpour, A., Rezaei, S., Sangaiah, A.K., Slowik, A., Mahmoodi Khaniabadi, S. (2021). Enhancement in quality of routing service using metaheuristic PSO algorithm in VANET networks. Soft Computing, 27: 2739-2750. https://doi.org/10.1007/s00500-021-06188-0
[12] Hamdi, M.M., Audah, L., Rashid, S.A. (2022). Data dissemination in VANETs using clustering and probabilistic forwarding based on adaptive jumping multi-objective firefly optimization. IEEE Access, 10: 14624-14642. https://doi.org/10.1109/ACCESS.2022.3147498
[13] Bany Taha, M., Talhi, C., Ould-Slimane, H., Alrabaee, S. (2022). TD-PSO: Task distribution approach based on particle swarm optimization for vehicular ad hoc network. Transactions on Emerging Telecommunications Technologies, 33(3): e3860. https://doi.org/10.1002/ett.3860
[14] Marwah, G.P.K., Jain, A. (2022). A hybrid optimization with ensemble learning to ensure VANET network stability based on performance analysis. Scientific Reports, 12(1): 10287. https://doi.org/10.1038/s41598-022-14255-1
[15] Ahmad, M., Hameed, A., Ullah, F., Wahid, I., Khan, A., Uddin, M.I., El-Sherbeeny, A.M. (2021). Adaptation of vehicular ad hoc network clustering protocol for smart transportation. Computers, Materials & Continua, 67(2): 1353-1368. https://doi.org/10.32604/cmc.2021.014237
[16] Kosuru, S., Suma, P., Alam, M.A., Hussain, M.A. (2022). An intelligent cluster-based energy efficient optimization algorithm to improve the network performance in VANET. Mathematical Statistician and Engineering Applications, 71(3): 201-208. https://doi.org/10.17762/msea.v71i3.159
[17] Choudhary, D., Pahuja, R. (2023). Awareness routing algorithm in vehicular ad-hoc networks (VANETs). Journal of Big Data, 10(1): 122. https://doi.org/10.1186/s40537-023-00742-3
[18] Al-dolaimy, F., Ali, R.R., Nabeel, N., Al-Dayyeni, W.S., Abbas, F.H., Hariz, H.M., Mostafa, S.A., Jubair, M.A. (2023). Hybrid optimization with enhanced QoS-based path selection in VANETs. International Journal of Intelligent Engineering & Systems, 16(4): 69-80. https://doi.org/10.22266/ijies2023.0831.06
[19] Ru, Y., Siddiqa, A., Ajmal, M., Jeong, B., Kim, D. (2023). Junction selection based on optimal-weighted multiple attributes for VANETs. Electronics, 12(4): 889. https://doi.org/10.3390/electronics12040889
[20] Husnain, G., Anwar, S., Sikander, G., Ali, A., Lim, S. (2023). A bio-inspired cluster optimization schema for efficient routing in vehicular ad hoc networks (VANETs). Energies, 16(3): 1456. https://doi.org/10.3390/en16031456
[21] Madhubabu, K., Snehalatha, N. (2023). Optimal path selection in vehicular adhoc network using hybrid optimization. Multimedia Tools and Applications, 83: 18261-18280. https://doi.org/10.1007/s11042-023-17513-0
[22] Blessy, M.C.A., Brindha, S. (2023). Maximizing VANET performance in cluster head selection using Intelligent Fuzzy Bald Eagle optimization. Vehicular Communications, 45: 100660. https://doi.org/10.1016/j.vehcom.2023.100660
[23] Azzoug, Y., Boukra, A. (2024). Improved junction-based routing for VANETs using a bio-inspired route stability approach. Ad Hoc Networks, 153: 103346. https://doi.org/10.1016/j.adhoc.2023.103346
[24] Naeem, A., Rizwan, M., Alsubai, S., Almadhor, A., Akhtaruzzaman, M., Islam, S., Rahman, H. (2023). Enhanced clustering-based routing protocol in vehicular ad-hoc networks. IET Electrical Systems in Transportation, 13(1): e12069. https://doi.org/10.1049/els2.12069
[25] Naruei, I., Keynia, F. (2022). Wild horse optimizer: A new meta-heuristic algorithm for solving engineering optimization problems. Engineering with computers, 38(Suppl 4): 3025-3056. https://doi.org/10.1007/s00366-021-01438-z
[26] Gandomi, A.H., Yang, X.S., Alavi, A.H. (2013). Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Engineering with computers, 29: 17-35. https://doi.org/10.1007/s00366-011-0241-y
[27] Zhang, Y.J., Li, T., Na, G.Y., Li, G.Q., Li, Y. (2015). Optimized extreme learning machine for power system transient stability prediction using synchrophasors. Mathematical Problems in Engineering, 2015: 529724. https://doi.org/10.1155/2015/529724
[28] Kantipudi, M.V.V.P., Aluvalu, R., Velamuri, S. (2023). An intelligent approach of intrusion detection in mobile crowd sourcing systems in the context of IoT based SMART city. Smart Science, 11(1): 234-240. https://doi.org/10.1080/23080477.2022.2117889
[29] Dharavat, N., Golla, N.K., Sudabattula, S.K., Velamuri, S., Kantipudi, M.P., Kotb, H., AboRas, K.M. (2023). Impact of plug-in electric vehicles on grid integration with distributed energy resources: A review. Frontiers in Energy Research, 10: 1099890. https://doi.org/10.3389/fenrg.2022.1099890
[30] Saini, V., Kantipudi, M.V.V.P., Meduri, P. (2023). Enhanced SSD algorithm-based object detection and depth estimation for autonomous vehicle navigation. International Journal of Transport Development and Integration, 7(4): 341-351. https://doi.org/10.18280/ijtdi.070408