Linett Velasquez-Jimenez*![]() | Claudia Marrujo-Ingunza
| Claudia Marrujo-Ingunza![]() | Santiago Rubiños-Jimenez
| Santiago Rubiños-Jimenez![]() | Juan Grados-Gamarra
| Juan Grados-Gamarra![]() | Herbert Grados-Espinoza
| Herbert Grados-Espinoza![]()
© 2025 The authors. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
This study presents the development of a vehicle security system based on the Internet of Things (IoT), integrating motion, vibration, ultrasonic, GPS, and facial recognition sensors. The system sends real-time alerts and records events through a web application, enhancing safety in risk scenarios. It uses an embedded architecture with Raspberry Pi and programmable modules, implementing data processing algorithms to detect anomalous events. Sensors were calibrated to reduce false alarms and increase detection accuracy. Tests were conducted on 30 sedan vehicles in Metropolitan Lima, simulating realistic conditions. Results showed 87.2% accuracy in facial recognition, 90.6% efficiency for the motion sensor, and 92.6% accuracy in GPS tracking. The vibration sensor reached 84%, and the ultrasonic sensor showed 72.7%, with reduced performance due to obstacles. A user satisfaction survey yielded an average rating of 4.6/5, highlighting the system’s ease of use, alert quality, and reliability. These findings validate the system’s technical feasibility and user acceptance. The solution is scalable and adaptable, ideal for vehicle fleets, public transport, or urban surveillance, and sets the foundation for future improvements using AI and computing for enhanced real-time analysis.
embedded system, facial recognition, geolocation, Internet of Things (IoT), motion sensor, real-time alert system, ultrasonic sensor, vibration sensor
The Internet of Things (IoT) represents a revolutionary advance by merging everyday objects with digital content through the collection and processing of information using smart sensors. This technology has transformed multiple sectors, including security, where its impact is particularly significant in enabling more dynamic and adaptive systems. In the context of vehicle security, the IoT has proven to be a key tool for addressing contemporary challenges, such as real-time monitoring and immediate notification of incidents to the relevant authorities [1, 2]. Globally, vehicles are particularly vulnerable to crimes such as theft and damage, depending on social factors such as crime rates and the technological infrastructure of each region. Traditional solutions, such as standard alarms, have proven ineffective against modern criminal tactics, especially in mid-range and low-end vehicles. This landscape has driven the integration of advanced IoT-based security systems, which connect everyday objects to the digital world, enabling real-time data collection and analysis [3, 4]. These systems not only improve risk detection, but also offer the ability to issue automatic alerts and coordinate preventive actions, representing a paradigm shift in vehicle security [5].
However, these advances are not without challenges. Technical limitations, such as false alarms and the lack of stable connectivity in certain regions, have reduced the effectiveness of some existing systems [6]. In addition, the growing incidence of vehicle theft highlights the need for more innovative solutions that combine advanced technologies with accessible designs to ensure their widespread implementation.
In this context, this study proposes the development and implementation of an IoT-based vehicle security system that combines motion, vibration, ultrasound, GPS, and facial recognition sensors. This system is designed to detect irregularities in real time and send automatic alerts to both owners and authorities, as well as record critical events through a web application. Unlike traditional solutions, the main contribution of this work lies in the multisensory integration of complementary technologies within a hybrid embedded architecture, which allows for more robust security coverage and more accurate and contextualized event detection. In addition, the system unifies event logging, real-time notifications, and remote user interaction on a single platform, which differentiates it from other solutions focused solely on passive or local monitoring [7].
The main objective of the study is to provide a reliable solution to increase vehicle safety by sending real-time alerts, recording events in a web application, and enabling efficient interaction between users and the system. Specific objectives include connecting the embedded system to the network to generate input data, developing a functional web application, and conducting tests to ensure the reliability of the system. User satisfaction is also evaluated as a key indicator of success. This study provides a practical and scalable solution that not only improves vehicle safety but also lays the foundation for future innovations in this field. Its recommendations are applicable to a wide range of contexts, highlighting the potential of the IoT to transform vehicle safety and effectively prevent crime.
In the field of vehicle safety, recent advances in IoT-based systems have enabled a significant transformation, focusing on the integration of advanced sensors, embedded platforms, and intelligent algorithms to prevent risks and ensure continuous monitoring. Recent work has explored the use of emerging technologies to overcome current challenges, highlighting approaches such as those in studies [8, 9], who proposed an IoT-based vehicle access system that optimizes authentication using sensors, showing promising results in terms of accuracy. However, limited applicability in environments with high electromagnetic interference and dependence on mobile networks pose significant performance challenges. Similarly, [8] highlighted how the implementation of IoT can improve urban security standards, although barriers related to connectivity and access to adequate technological infrastructure still persist in certain cities.
The integration of machine learning has been another relevant advance. Ahmed et al. [6] explored how machine learning algorithms can improve the detection of critical events, demonstrating benefits in terms of accuracy and response speed. However, the complexity of these models requires robust infrastructure, which limits their adoption in low-cost solutions. Complementarily, they highlighted that the use of AI models in distributed environments can cause bottlenecks when multiple sensors generate data simultaneously, affecting real-time latency. This highlights the importance of hybrid strategies to optimize processing without compromising system reaction time.
The use of advanced sensors in vehicle systems is widely recognized as a fundamental pillar of vehicle safety. Barman et al. [10] demonstrated the usefulness of sensors such as GPS, ultrasound, and vibration to detect accidents or external tampering, although they cautioned that sensor accuracy decreases significantly when faced with reflective materials or in areas with low satellite coverage. Periyarselvam et al. [11] also identified delays of more than 3 seconds in data transmission from sensors in saturated mobile networks, which can compromise the timely detection of threats in real time.
Embedded platforms such as Raspberry Pi have emerged as a viable solution for the development of vehicle safety systems. Marhoon et al. [5] implemented a Raspberry Pi-based vehicle surveillance system, integrating motion sensors and cameras to monitor environments in real time, highlighting its versatility and affordability. However, Karthikeyan et al. [1] warned that these platforms have limitations when dealing with large volumes of data, recommending combining them with technologies such as fog computing to distribute the processing load.
On the other hand, emerging technologies such as deep learning and fog computing are expanding the capabilities of intelligent vehicle systems. Viswanatha et al. [12] proposed an intelligent anti-theft system that integrates facial recognition with convolutional neural networks (CNN), achieving high effectiveness in controlled tests. However, the volume of data generated can overload systems without cloud support or distributed architectures. Similarly, Teradal et al. [13] showed that biometric and authentication systems must be complemented with local preprocessing modules to avoid congestion in the overall system.
Despite these advances, studies [5, 14] argue that many technological solutions are still validated solely in simulated environments, without considering external factors such as weather, interference, or unpredictable human behavior, which limits their mass applicability.
Although recent literature addresses several key aspects in the development of vehicle safety systems, there is still a gap in studies that evaluate the interaction between multiple technologies in real-world scenarios. Advances in sensors, embedded platforms, and intelligent algorithms show great potential, but the lack of standardization and comparative analysis between different approaches limits the generalization of these findings. In this context, this work not only seeks to advance the design and implementation of an integrated vehicle safety system, but also to fill some of the gaps identified in the literature by evaluating key technologies such as advanced sensors and IoT platforms in controlled scenarios.
Security systems are technologies and procedures designed to protect people and property by identifying and responding to specific risks in an environment. Their fundamental purpose is to detect potential threats, such as intrusions or fires, and activate automatic response mechanisms [15, 16]. These systems contribute to the regulation and stability of daily activities, ensuring a safe environment for work and the preservation of everyday life.
In this context, vehicle safety is divided into two approaches: active safety and passive safety. Active safety includes systems that optimize vehicle control and stability while driving, such as ABS brakes and adaptive suspensions, which operate under normal conditions to prevent accidents. In contrast, passive safety focuses on protecting occupants in the event of a collision through devices such as airbags, roll bars, and seat belts, which are activated only in impact situations to reduce the risk of injury [17, 18].
Vehicle protection encompasses technologies and measures that seek to secure both the vehicle and its occupants, focusing on preventing theft, minimizing accidents, and enabling constant location tracking of the car. It ranges from alarms and immobilizers to advanced locking and security systems, which are increasingly in demand by drivers and adopted by manufacturers. This protection is key to improving road safety and reducing the risks of vandalism and other incidents [5].
In the field of technology, a web application allows users to interact with a server through a browser, either on an internal network or on the internet. Python is a programming language known for its simple syntax and ease of use, as well as its extensive standard library that facilitates application development [19]. PHP, also popular in web development, allows code to be easily integrated with HTML, making it accessible to both beginners and advanced programmers [19].
MySQL is an open-source database system used to create secure applications, especially in the cloud, thanks to its ability to manage large volumes of data [20]. On the other hand, in the field of Artificial Intelligence, methods and algorithms are used to solve complex problems that require levels of intelligence comparable to humans, addressing challenges that require advanced processing and decision-making [21]. Object recognition is a computer vision technique that allows objects within an image or video to be identified and classified in real time. This technology is used in various applications, such as security, biometrics, and medicine, and is complemented by IoT, a system that connects physical objects to the Internet through sensors, enabling data collection and remote control of device [22, 23]. Sensors are devices that transform physical energy into electrical signals to control and monitor various aspects of a system. It enables the detection of objects and conditions in various environments, facilitating tasks such as counting, positioning, classifying, and ensuring quality [24].
Finally, the RASPBERRY Pi is a development board that includes a microprocessor (CPU) and a variety of connectors and systems that facilitate audio and video transmission [5]. Similarly, Proteus VSM is an electronic design and simulation system that allows circuits to be created and tested, visualizing their behavior in real time [25] Arduino, for its part, is an open-source hardware platform ideal for the development of interactive electronic projects [12].
The research presented employed a theoretical-applicative approach with an experimental design for the development and evaluation of an IoT-based vehicle safety system, selected to address specific problems related to vehicle protection through innovative technological solutions. This experimental design allowed for direct observation of the effects of controlled variables on the functionality and efficiency of the system. The model used was characterized by being applied and having descriptive, relational, and explanatory levels, which allowed for a comprehensive understanding of the problem and its solution. The selection of this design was justified by the need to validate, under controlled conditions, the effectiveness of sensors integrated into an urban operating environment, simulating real-life risk situations.
The experimental sample consisted of 30 private sedan-type vehicles, selected through non-probabilistic convenience sampling, considering criteria such as: frequent use in urban areas, access to the electrical grid, and stable mobile connectivity. Participating owners were informed in advance and authorized the use of their vehicles for supervised testing.
Test conditions were established in specific areas of Metropolitan Lima with moderately controlled environmental variables, including average traffic times and areas with acceptable GPS signal. The scenarios included simulations of unauthorized access attempts, simulated external vibrations, georeferenced movements, and object approaches at different distances to test the ultrasonic sensor.
The system development was structured into four main phases, described as follows:
4.1 Phase 1 - system design
In this stage, the specific objectives, technological components, and system architecture were defined. Functional and non-functional requirements were identified, and an embedded system was designed that integrated Raspberry Pi, Arduino, and motion, vibration, ultrasound, and GPS sensors. In addition, a functional diagram was developed to represent the interaction between the sensors, the microprocessor, and the web application.
4.2 Phase 2 - infrastructure implementation
The technical implementation included the configuration and programming of the sensors and electronic modules, as well as the development of a web application with PHP and MySQL for the management of data generated by the sensors. The connection between the embedded system and the web application was established using the HTTP protocol and tools such as cURL to ensure real-time data exchange.
4.3 Phase 3 - validation and testing
To ensure the proper functioning of the system, controlled tests were carried out on a sample of 30 sedan vehicles in Metropolitan Lima. These tests evaluated the accuracy and efficiency of each sensor under realistic conditions, the robustness of the connection between the IoT devices and the web application, as well as the system's ability to generate accurate alerts and minimize false alarms. Each sensor was activated under equivalent conditions in all vehicles, recording metrics such as response time, success rate, and occurrence of false positives. Data collection included structured surveys and interviews with vehicle owners, the content of which was validated by a panel of three experts in electronic security and embedded systems, and supplemented with a preliminary statistical analysis using mean, standard deviation, and interquartile range.
4.4 Phase 4 - user satisfaction assessment
Finally, user satisfaction was assessed using a questionnaire designed to measure key aspects such as the system's ease of use, efficiency in detecting events, and the quality of the alerts generated. This instrument allowed us to identify areas for improvement and validate the acceptance of the system in a real-world context. The analysis of the responses focused on four dimensions: perceived usefulness, clarity of the interface, confidence in the alerts, and willingness to recommend the system.
5.1 Phase 1 - system design
The design of the vehicle safety system focused on establishing a robust and functional architecture that integrates multiple sensors and electronic modules connected to a database via a web application. During this stage, specific objectives were defined and the necessary requirements were identified to ensure the correct development of the system. This design addressed the limitations identified in recent literature, such as low sensor accuracy in complex urban environments, data transmission latency, and lack of scalability in existing solutions. Priority was given to the use of low-cost, high-availability, and easy-to-integrate components, such as Raspberry Pi and Arduino, to achieve a practical, modular, and replicable solution. The key elements of this phase are described below, including related figures and tables.
The general architecture of the system is represented in the Functional Block Diagram (Figure 1). This diagram illustrates the interaction between the sensors (ultrasound, motion, vibration, and GPS), the Raspberry Pi microprocessor, and the web application, which acts as an interface for data management and real-time alert generation. This structure ensures efficient communication between components and allows for constant monitoring of the vehicle. In addition, a sequential response logic was established, where each type of sensor generates differentiated events, thus optimizing the filtering of false alerts.
Figure 1. Functional block diagram
Figure 1 shows the general architecture of the vehicle security system. Key components are highlighted, such as motion, vibration, ultrasound, and GPS sensors, connected to a Raspberry Pi microprocessor, which sends data to a web application. This functional design ensures efficient communication between components and the database for real-time alerts.
5.1.1 Functional and non-functional requirements
The system requirements were established to guide its development. These requirements are summarized in Tables 1 and 2. The requirements were defined based on criteria of interoperability with standard IoT technologies, as well as user-centered design models.
Table 1 details the essential functionalities of the system, such as user registration, authentication, sensor data reception, and customized report generation. These elements were designed to provide an efficient and adaptable user experience.
Table 2 describes characteristics such as security, performance, usability and scalability of the system. These specifications ensure that the application is robust, capable of handling large volumes of data and adaptable to future technological expansions. The possibility of adapting to mobile networks and environments with limited connectivity was also considered, using temporary data buffers to mitigate losses.
Table 1. Functional requirements of the web application
|
N° |
Functional Requirement |
Concept |
|
FR1 |
User requirement |
The system must allow users to register with their first name, last name, email address, username, and password. |
|
FR2 |
Login |
The system must allow users to authenticate themselves using their username and password. |
|
FR3 |
Receiving sensor data |
The system must receive and store data from different types of sensors (ultrasound, vibration, GPS, facial recognition, movement). |
|
FR4 |
Report generation |
The system must allow users to generate reports based on sensor categories. |
|
FR5 |
User interface |
The system must provide a user-friendly interface for viewing data and reports. |
Table 2. Non-functional requirements of the web application
|
N° |
Non-Functional Requirement |
Concept |
|
NFR1 |
Security |
The system must ensure that user data and sensor information are stored securely, using encryption techniques for passwords. |
|
NFR2 |
Performance |
The system must be able to handle a large volume of sensor and user data without compromising response speed. |
|
NFR3 |
Usability |
The interface must be intuitive and easy to use to ensure that users can navigate and access information without difficulty. |
|
NFR4 |
Scalability |
The system must be able to scale to allow for the addition of new sensor types and functionalities in the future. |
5.1.2 Circuit and component design
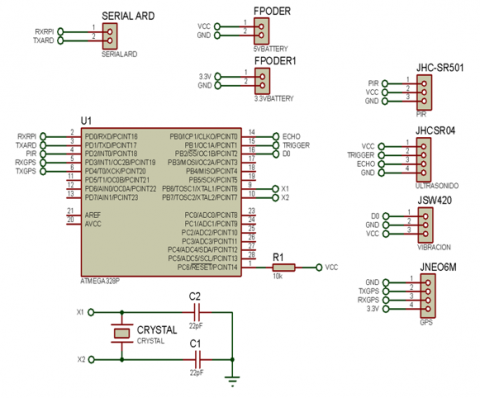
The design of the electronic circuits was captured in the Sensor Network Schematic Diagram (Figure 2). This schematic shows the electrical connections between the sensors, the microprocessor and other electronic modules. The graphical representation allowed planning the signal flow necessary for the correct operation of the system. Principles of energy efficiency and electromagnetic compatibility were applied in the design of connections and ports.
Figure 2 shows how each component is connected, ensuring accurate integration of the sensors with the Raspberry Pi to capture and process data effectively.
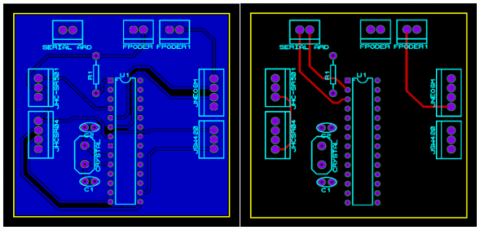
In addition, the printed circuit board (PCB) was developed, whose designs are presented in Figure 3: Bottom and Top view of the PCB. The bottom view shows the conductive tracks responsible for connecting the components, while the top view highlights the physical layout of the electronic elements, such as resistors, capacitors and chips.
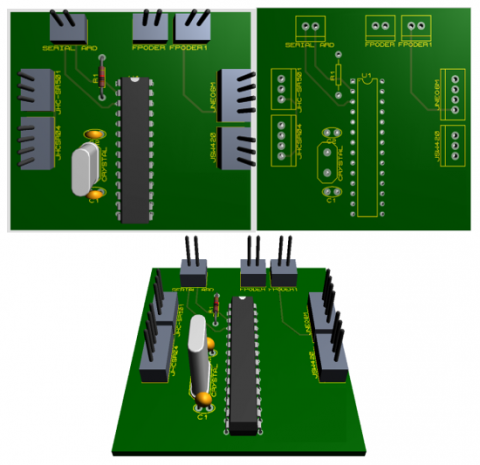
Figure 4 highlights the final connections and general layout of the electronics, providing a clear perspective of the final product and allowing validation of key aspects of the design prior to implementation. This pre-fabrication simulation allowed for the detection of pin orientation errors, misconnected traces and potential cross talk.
Figure 2. Schematic diagram of sensor network
(a) (b)
Figure 3. Bottom and top view of the Proteus PCB
Figure 4. 3D visualization
5.2 Phase 2 - implementation of the infrastructure
In this phase the system infrastructure materialized, integrating hardware and software to ensure data capture, transmission and storage. The key elements are described below:
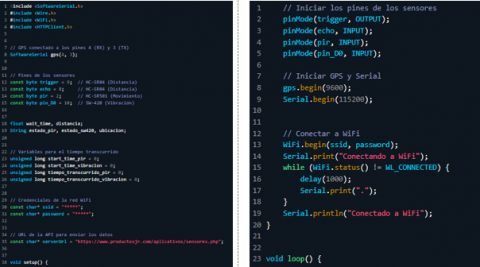
Figure 5. Sending data with cURL
Table 3. IoT network and sensor implemented code framework
|
The code controls the collection of data from the sensors and the transmission of information to the web server via WiFi connection. Each sensor is programmed to record specific events and send them to the central system. |
Displays the code in charge of initializing the sensors and establishing the connection to the WiFi network, ensuring continuous data transmission. |
|
The system measures distance using an ultrasonic sensor and how it detects movement, categorizing events in real time. |
Details the code used to record vibrations and capture geographic coordinates with the GPS module. |
This Figure 5 represents the data flow in the system, showing the algorithm in charge of processing the information collected by the integrated sensors. Among these sensors is the ultrasound sensor (HC-SR04), which measures the distance between an object and the vehicle by the time it takes for an ultrasonic pulse to return to the sensor, allowing the identification of nearby obstacles. Also included is the motion sensor (HC-SR501), which detects movement in the surrounding area using passive infrared (PIR) technology, making it effective in alerting to unauthorized presence. On the other hand, the vibration sensor (SW-420) registers shocks or vibrations that could indicate attempts to tamper with or steal the vehicle, while the GPS module (NEO-6M) captures location coordinates in real time and transmits them to the database. An empirically calibrated activation threshold was established for each sensor to reduce false positives. This system ensures efficient integration between the sensors and the web application through the use of tools such as cURL, which facilitates the timely delivery of alerts and the generation of accurate notifications based on critical events. The embedded system was programmed using Arduino and Python scripts, allowing compatibility between devices and facilitating future code extension. The developed algorithms contemplate continuous monitoring routines and basic validation of signals before sending them.
Table 3 presents key fragments of the code developed for the integration and operation of sensors in a vehicular IoT system. It includes the initial configuration of the sensors, data transmission via WiFi and the specific functionality of each sensor, such as motion detection, vibration, distance measurement and real-time geolocation. Each code block was individually tested in a simulated environment before integration to verify stability and accuracy.
5.2.1 Web application development
The web application was designed to allow direct interaction between users and the system. Usability, security and scalability were prioritized. The frontend was developed in HTML5 and JavaScript, while the backend was implemented in PHP and MySQL, following the MVC (Model-View-Controller) model to facilitate system maintenance.
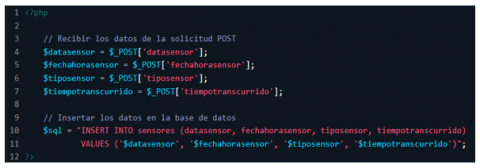
Figure 6. Sensor data scripting and storage in MySQL
Figure 6 shows the script that processes the data received from the sensors through POST requests and stores them in a MySQL database, ensuring an organized and accessible record.
Figure 7. Sensor data scripting and storage in MySQL
Figure 7 illustrates the use of the OpenCV library to detect faces in real time. The results are highlighted with a red box outlining the detected faces. The algorithm was trained with a limited set of local images, allowing basic recognition under favorable lighting conditions.
5.2.2 Web application prototypes
The user interface was developed considering accessibility and functionality, offering tools to visualize data and generate reports. The responsive design ensures that the application is accessible from mobile and desktop devices.
(a) (b)
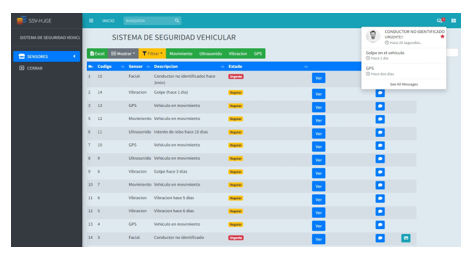
Figure 8. Sensor logging and reporting prototype
Figure 8 shows two key functionalities of the system: The initial screen (a) allows users to enter their credentials to access the system, complying with established security measures. On the other hand, the reporting functionality (b) provides users with access to detailed information on the events recorded by the sensors, improving the monitoring and control of the system.
Figure 9. User menu prototype
Figure 9 shows the main menu of the system, organized to facilitate navigation between the main functions, such as sensor configuration and report generation.
5.2.3 Database integration
To ensure efficient data management, a MySQL database was implemented.
Figure 10. MySQL database
Figure 10 shows the structure of the database developed in MySQL, designed to efficiently manage the information generated by the vehicle security system. The database includes tables dedicated to the storage of user and sensor data. In the first table, user data such as names, surnames, e-mail addresses, usernames and passwords are recorded, allowing to manage access to the system in a secure and organized way. The second table contains the data collected by the sensors, including information such as date, time, sensor type and values obtained, ensuring a structured storage to facilitate subsequent queries and analysis. Indexes and primary keys were established to optimize searches, and referential integrity rules were configured to maintain data consistency. This configuration guarantees fast and reliable access to information, optimizing system functionality in real time.
5.3 Phase 3 - validation and testing
To ensure the correct operation of the IoT-based vehicle safety system, controlled tests were carried out on a sample of 30 sedan category vehicles in Metropolitan Lima. These tests were conducted to evaluate the accuracy, efficiency and robustness of the sensors under different operating conditions.
The results are summarized in Table 3, which presents the performance of each sensor. The data includes the average efficiency, standard deviation and ranges of values obtained in the tests. For example, the GPS sensor showed an average accuracy of 92.6%, while the ultrasound sensor obtained a performance of 72.7%, affected by the presence of obstacles in some tests.
Table 4. Sensor efficiency test records
|
Sensor |
Conditions Evaluated |
Efficiency Average |
Standard Deviation |
Range (Min-Max) |
|
Facial Recognition |
Illumination, Expressions, Angles, Backgrounds |
4.36/5 (87.2%) |
0.41 |
3.50 - 5.00 |
|
Ultrasound |
Distance, Obstacles |
7.27/10 (72.7%) |
1.08 |
5.00 - 9.00 |
|
Motion |
Detection angle, Obstacles |
4.53/5 (90.6%) |
0.73 |
3.00 - 5.00 |
|
Vibration |
Intensity (High, Medium, Low) |
4.20/5 (84.0%) |
0.76 |
3.00 - 5.00 |
|
GPS |
Accuracy at different locations |
4.63/5 (92.6%) |
0.42 |
4.00 - 5.00 |
Table 4 summarizes the results obtained by each sensor evaluated under realistic conditions. The high performance of the GPS sensor and the motion sensor stand out, both with efficiencies above 90%.
The ultrasound sensor showed the lowest efficiency due to its susceptibility to reflective or curved surfaces, which interferes with accurate distance measurement. In addition, in environments with multiple physical obstacles, such as nearby vehicles or metal structures, inconsistent readings were observed.
The vibration sensor, although showing acceptable performance, had limitations in discriminating between accidental vibrations (e.g., slamming doors or nearby traffic) and relevant events such as tampering attempts, which could cause unnecessary alerts.
In the case of the facial recognition sensor, factors such as poor lighting or atypical facial expressions affected the accuracy of the algorithm, decreasing its effectiveness in night or indoor conditions.
Suggested improvements include the implementation of automatic adaptive calibration in the ultrasonic and vibration sensors, as well as the use of redundant sensors or sensors with intelligent filters to reduce false positives.
In the face recognition module, it is recommended to incorporate deep learning algorithms trained with a greater diversity of faces and lighting scenarios. To optimize overall accuracy, data fusion from multiple sensors (sensor fusion) could also be considered to validate events from different angles.
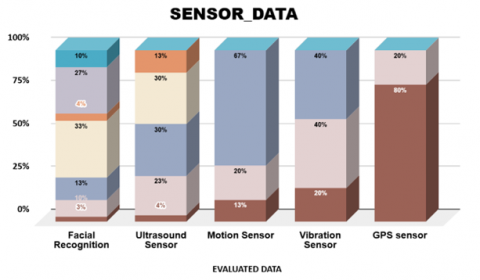
The efficiency data is complemented by the following graph illustrating the distribution of ratings for each sensor:
Figure 11. Distribution of ratings for each sensor
Figure 11 shows the performance of the sensors evaluated in the IoT-based vehicle safety system, highlighting the distributions of ratings for each technology. The facial recognition sensor presented a remarkable performance, with more frequent ratings of 4.25 (33%) and 4.75 (27%), while lower values such as 3.50 and 3.75 represented a combined 13%. On the other hand, the ultrasound sensor showed greater variability in its ratings, with predominant scores of 7.00 and 8.00 (30% each), followed by 23% at 6.00 and 13% at 9.00, highlighting its solid performance despite the presence of obstacles. The motion sensor had the best overall rating, with 67% at 5.00, evidencing its high efficiency in detecting suspicious activity, while scores of 3.00 and 4.00 accounted for the remaining 33%. In the case of the vibration sensor, the results were evenly distributed between the 4.00 and 5.00 scores (40% each), with 20% at 3.00, reflecting its effectiveness in registering impacts and tampering. Finally, the GPS sensor stood out for its high accuracy, with 80% of the evaluations at 4.00 and 20% at 5.00. In general, the graph reflects a consistent and efficient performance of the sensors, which demonstrates the robustness and functionality of the system developed to ensure vehicle safety.
5.4 Phase 4 - user satisfaction evaluation
In this phase, the users' experience with the vehicle safety system was evaluated using surveys that measured ease of use, efficiency in event detection, quality of the alerts generated, and overall satisfaction with the system. The questionnaire was designed with a 5-point Likert scale (1 = very dissatisfied, 5 = very satisfied), and was administered to the 30 participating users after a supervised test session of the system.
The questions were validated by expert judgment in security systems and IoT technology, and structured in four dimensions: usability, event accuracy, clarity of notifications, and overall perception. The results obtained were analyzed and are presented in the graph “Satisfaction Ratings Table”, which summarizes the percentage of high ratings (4-5) for each dimension evaluated.
Figure 12. Distribution of user satisfaction ratings
Figure 12 shows that the system obtained an outstanding rating in all the dimensions evaluated. The quality of alerts stood out with 95% “very good” ratings, followed by overall satisfaction with 93%. Ease of use also achieved a high level of acceptance with 92%, while detection efficiency registered 89%. These results reflect that the system meets users' expectations, consolidating itself as a reliable and efficient tool for vehicle safety.
The results presented in this graph confirm that the system is well received by users, especially for its ability to generate accurate alerts and its ease of use.
However, the slightly lower performance in the detection efficiency dimension suggests opportunities for improvement.
It is recommended that the activation thresholds of the vibration and ultrasound sensors be adjusted to avoid missing relevant events or generating false alarms, especially in noisy urban environments.
It is also suggested to incorporate active feedback in the system interface that allows the user to rate the accuracy of each alert received, which would enrich the analysis and allow for continuous recalibration.
This study was able to implement a comprehensive system that combines sensor technologies, machine learning and embedded platforms, such as Raspberry Pi, to ensure efficient monitoring and immediate response to possible security events. The designed architecture proved to be effective in controlled urban scenarios, achieving acceptable levels of efficiency in the detection of critical events.
In line with findings from studies [3, 8] which demonstrated an IoT-based vehicular system for tracking and theft prevention, this research reinforces the applicability of these technologies in the vehicular domain. Furthermore, the results obtained in the evaluation of motion and GPS sensors, with detection efficiencies above 90%, are consistent with studies [10, 26], which highlighted the accuracy of smart sensors in accident and intrusion prevention.
The use of Raspberry Pi as the main platform proved to be an affordable and efficient solution for the development of embedded systems, as proposed by studies [1, 15]. The ease of configuration and the ability to integrate with advanced sensors justify its choice as the core of the vehicular system in this study.
In terms of accuracy and detection capability, the GPS sensor proved to be one of the most reliable components, with an average efficiency of 92.6%, which supports the relevance of this device in vehicular systems according to Marhoon et al. [5]. On the other hand, the lower relative efficiency of the ultrasound sensor, attributed to obstacle interference, coincides with the limitations identified by Kamalesh et al. [27], who observed significant fluctuations in environments with reflective materials.
Additionally, this study identified the importance of user experience in the acceptance and effectiveness of the system. The user satisfaction results, with an average rating of 4.6 out of 5, are consistent with the work of studies [6, 9], who emphasized that usability and alert quality are key factors for the success of intelligent vehicular systems.
One of the limitations of the present study is the absence of machine learning algorithms in signal processing, which could have further optimized event detection and classification. Therefore, a recommended future line of research is the implementation of machine learning models, such as neural networks or supervised classification algorithms, to reduce false positives and adapt the system to the specific behavior of each user. This has been explored in research such as studies [7, 12, 13], where deep learning algorithms were integrated with sensors to improve threat prediction and facial recognition.
In addition, it is suggested to explore fog computing as a mechanism to reduce response latency without relying entirely on cloud services, following the proposal of studies [28, 29]. The integration of this technology would enable a more distributed and resilient architecture in the face of connectivity failures. It is also recommended to incorporate sensor fusion, combining vibration, motion and GPS data to generate more robust and contextualized decisions. This approach would strengthen system accuracy in complex scenarios such as subway parking lots, rural areas with poor connectivity, or electromagnetically saturated environments.
Finally, future research could consider longitudinal testing with larger data volumes and more adverse conditions, allowing validation of sustained system performance in real-world contexts of high traffic or constant mobility. This expansion would not only strengthen the external validity of the model, but would also facilitate its scalability to vehicle safety solutions in logistics, urban transport and corporate fleets in Latin America or other regions with similar problems.
The developed system demonstrated high efficiency in the integration of IoT technologies for vehicle security, highlighting the performance of the sensors and the positive perception of the users. The facial recognition module achieved a success rate of 87.2% in identifying faces in different scenarios, confirming its effectiveness and reliability in identifying authorized drivers, a crucial element in preventing unauthorized access. The ultrasonic sensor, with a 72.7% success rate, although susceptible to interference from obstacles, proved to be a reliable tool for detecting nearby objects, improving safety in driving maneuvers.
The motion sensor stood out for its ability to identify critical situations, such as theft attempts or emergencies, with a success rate of 90.6%, positioning itself as an essential component of the system. The vibration sensor, although with an average accuracy of 84%, was effective in detecting external tampering or sudden movements that could damage the vehicle. Finally, the GPS sensor achieved an outstanding performance of 87.4%, providing accurate and consistent information on the real-time location of the vehicle, which is vital for continuous monitoring and tracking.
The positive user perception, with average satisfaction ratings of 4.6 out of 5, reflects the ease of use and reliability of the alerts generated by the system. This confirms that the integration of IoT technologies is not only effective in preventing risk situations, but also improves the user experience by ensuring continuous and accurate monitoring.
In conclusion, this work shows that the use of advanced sensors and embedded systems allows the creation of reliable and practical solutions that contribute significantly to the protection of vehicles and their occupants, reaffirming the importance of technology in the field of vehicle safety.
Despite the achievements, the study presents some limitations that should be considered for future developments. One of the main limitations was the reliance on a reduced number of technologies and sensor models, which restricted the scope of the tests and the diversity of scenarios evaluated. Although the user satisfaction results reflected positive perceptions, the limited sample size might not represent the totality of experiences in different usage contexts. In addition, the susceptibility of the ultrasonic sensor to obstacles slightly reduced its efficiency in complex environments, pointing to the need to improve its design or calibration for adverse scenarios.
To mitigate this limitation, it is recommended to use new generation ultrasonic sensors with greater angular range and self-regulating capability, as well as to combine their output with infrared or LIDAR sensors to validate obstacles more accurately.
It is also proposed to incorporate dynamic calibration routines that adjust detection thresholds according to the environment and external conditions, thus reducing false positives or erroneous readings.
Another limitation was the lack of integration of advanced machine learning algorithms, which could significantly improve system accuracy and reduce false alarms in critical events. Likewise, the implementation of emerging technologies such as cloud computing, which could optimize data management and response speed, was not considered.
In that sense, it is suggested to implement supervised classification models, such as SVM or neural networks, trained with real scenarios captured by the system's sensors. This would allow discriminating real events from interferences, increasing the contextual intelligence of the system.
In addition, the use of edge computing platforms would facilitate local preprocessing of data before being sent to the cloud, reducing latency and improving system autonomy in environments with limited connectivity.
For future work, it is recommended to perform a broader evaluation that includes various sensor brands and models, exploring their performance in adverse conditions and assessing their adaptability to different vehicular environments. It would also be valuable to develop a longitudinal test to analyze the stability and durability of the system during prolonged use in fleets or public transport vehicles.
The integration of machine learning algorithms, together with artificial intelligence technologies, can enhance the performance of the system, ensuring greater accuracy and scalability. Finally, expanding the scope of the study to include tests on vehicles of different categories and in diverse environments will provide a more complete view of the system's capabilities, strengthening its applicability in vehicle safety and its potential adoption in commercial applications.
This research was not supported by any specific grant or funding agency. The authors would like to thank all individuals who voluntarily participated in the testing phase, providing valuable insights that contributed to the system's evaluation and refinement. Their cooperation was essential to the successful completion of this work.
[1] Karthikeyan, S., Raj, R.A., Cruz, M.V., Chen, L., Vishal, J.A., Rohith, V.S. (2023). A systematic analysis on raspberry pi prototyping: Uses, challenges, benefits, and drawbacks. IEEE Internet of Things Journal, 10(16): 14397-14417. https://doi.org/10.1109/JIOT.2023.3262942
[2] Avinash Babu, K., Eswara Rao, G., Aparna, G., Sowmya, N. (2024). IoT based security alert system for vehicles. International Journal of Engineering Technology and Management Sciences, 8(6): 48-54. https://doi.org/10.46647/ijetms.2024.v08i06.008
[3] Agarwal, R., Boominathan, P. (2018). Vehicle security system using IoT application. International Research Journal of Engineering and Technology (IRJET), 5(4): 910-912. https://doi.org/10.22214/ijraset.2023.56665
[4] Abraham, S.G., Makengo, R.M., Jordan, F.M. (2023). Intrusion alarm system based on radio frequency technology, GPS, GSM and dijikstrat algorithm for notification triangulation. International Journal of Information System and Computer Science, 7(1): 21-30. https://doi.org/10.56327/ijiscs.v7i1.1436
[5] Marhoon, H.M., Alanssari, A.I., Basil, N. (2023). Design and implementation of an intelligent safety and security system for vehicles based on GSM communication and IoT network for real-time tracking. Journal of Robotics and Control (JRC), 4(5): 708-718. https://doi.org/10.18196/jrc.v4i5.19652
[6] Ahmed, I., Jeon, G., Ahmad, A. (2021). Deep learning-based intrusion detection system for internet of vehicles. IEEE Consumer Electronics Magazine, 12(1): 117-123. https://doi.org/10.1109/MCE.2021.3139170
[7] Taqi, A.M., AlSaleh, H.T., Jarkhi, A.A., Aljadi, H.M., Abdullah, H.Y., Karar, A.S. (2023). Automotive security system integrating machine learning and internet-of-things. In 2023 5th International Conference on Bio-engineering for Smart Technologies (BioSMART), Paris, France, pp. 1-4. https://doi.org/10.1109/biosmart58455.2023.10162111
[8] Penchalaiah, N., Venkatesh, B., Suresh, Y., Koneru, L.S., Nuka, M.R., Babu, J.C. (2024). IoT intrusion detection system for vehicle and emission monitoring: Enhancing cybersecurity in connected transportation. In 2024 IEEE 6th International Conference on Cybernetics, Cognition and Machine Learning Applications (ICCCMLA), Hamburg, Germany, pp. 328-333. https://doi.org/10.1109/ICCCMLA63077.2024.10871291
[9] Abdalzaher, M.S., Fouda, M.M., Elsayed, H.A., Salim, M.M. (2023). Toward secured IoT-based smart systems using machine learning. IEEE Access, 11: 20827-20841. https://doi.org/10.1109/ACCESS.2023.3250235
[10] Barman, S., Hafiz, M.F.B., Khan, N.A. (2024). An IoT-based smart system for the detection, notification and prevention of vehicle accidents. In 2024 6th International Conference on Electrical Engineering and Information & Communication Technology (ICEEICT), Dhaka, Bangladesh, pp. 1169-1174. https://doi.org/10.1109/iceeict62016.2024.10534370
[11] Periyarselvam, K., Akash, G., Harish, V., Thunaivan, V (2024). Advancing road safety through cloud based RSU solutions for smart internet of vehicles. Journal of IoT in Social, Mobile, Analytics, and Cloud, 6(2): 176-187. https://doi.org/10.36548/jismac.2024.2.008
[12] Viswanatha, V., Hebbar, A., Anand, N., Kumar, A. (2024). AI-enabled smart vehicle with CNN and deep face for anti-theft detection system. In 2024 First International Conference on Software, Systems and Information Technology (SSITCON), Tumkur, India, pp. 1-6. https://doi.org/10.1109/SSITCON62437.2024.10796070
[13] Teradal, R.J., Chougule, S.J., Chopade, S.N., Chougule, A.B., Dalal, V., Atiwadkar, S.S. (2025). Comprehensive IoT-based vehicle security: License verification and biometric authentication. In 2025 6th International Conference on Mobile Computing and Sustainable Informatics (ICMCSI), Goathgaun, Nepal, pp. 226-233. https://doi.org/10.1109/ICMCSI64620.2025.10883395
[14] Suryavanshi, A.P., Kajal, S., Akanksha, P., Vishakha, P., Markad, A. (2024). An IoT based vehicle theft detection and remote engine locking system. International Journal for Research in Applied Science & Engineering Technology, 12(5): 579-586. https://doi.org/10.22214/ijraset.2024.61601
[15] Halona, І., Ihnatenko, О., Kharchenko, О. (2023). The role of technology in improving transport safety: Vehicle and infrastructure safety systems. Information Technology and Engineering, 6(180): 226-230. https://doi.org/10.33042/2522-1809-2023-6-180-226-230
[16] Nwankwo, O.U., Nwakanma, C.I., Kim, D.S., Lee, J.M. (2022). IoT-assisted intelligent vehicle tracking system using cloud computing. In 2022 13th International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Republic of Korea, pp. 1677-1679. https://doi.org/10.1109/ictc55196.2022.9952752
[17] Hang, P., Chen, X. (2022). Towards active safety driving: Controller design of an active rear steering system for intelligent vehicles. Machines, 10(7): 544. https://doi.org/10.3390/machines10070544
[18] Ruiz, S., García, F. (2021). Extraordinary passive safety in cars using a sensor network model. Ingeniería, 26(3): 479-492. https://doi.org/10.14483/23448393.18493
[19] Truszkowski, K., Pańczyk, M. (2022). Analiza porównawcza wytwarzania aplikacji internetowych na przykładzie Javy oraz PHP. Journal of Computer Sciences Institute, 25: 379-383. https://doi.org/10.35784/jcsi.3050
[20] bin Uzayr, S. (2023). Mastering SQL: A beginner's guide. CRC Press. https://doi.org/10.1201/9781003229629
[21] Geetha, V., Gomathy, C.K. (2025). Navigating the AI landscape: A systematic guide to solving complex challenges. https://ijsrem.com/download/navigating-the-ai-landscape-a-systematic-guide-to-solving-complex-challenges/.
[22] Chavan, C., Hembade, S., Jadhav, G., Komalwad, P., Rawat, P. (2023). Computer vision application analysis based on object detection. International Journal of Scientific Research in Engineering and Management, 7(4): 1-6.
[23] Prathyusha, M.R., Bhowmik, B. (2023). IoT evolution and recent advancements. In 2023 9th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, pp. 1725-1730. https://doi.org/10.1109/ICACCS57279.2023.10112761
[24] Deeraj, C., Subburaj, T., Naik, S.N. (2024). Intellect drive using IoT. International Journal of Advanced Research in Science, Communication and Technology, 4(4): 43-46. https://doi.org/10.48175/ijarsct-19010
[25] Wu, G., Liu, Y., Fang, L., Chai, T. (2021). Revisiting light field rendering with deep anti-aliasing neural network. IEEE Transactions on Pattern Analysis and Machine Intelligence, 44(9): 5430-5444. https://doi.org/10.1109/tpami.2021.3073739
[26] Kuri, S.K., Islam, T., Jaskolka, J., Ibnkahla, M. (2022). A threat model and security recommendations for IoT sensors in connected vehicle networks. In 2022 IEEE 95th Vehicular Technology Conference: VTC2022-Spring, Helsinki, Finland, pp. 1-5. https://doi.org/10.1109/vtc2022-spring54318.2022.9860359
[27] Kamalesh, S., Varunvisvanath, P.S., Thirunavukkarasu, M. (2023). IoT based safety system for baja vehicle. International Journal for Research in Applied Science & Engineering Technology, 11(5): 3179-3183. https://doi.org/10.22214/ijraset.2023.52316
[28] Alreshidi, E.J. (2022). Introducing fog computing (FC) technology to internet of things (IoT) cloud-based anti-theft vehicles solutions. International Journal of System Dynamics Applications (IJSDA), 11(3): 1-21. https://doi.org/10.4018/IJSDA.287114
[29] Chinnasami Sivaji, M.R., Prasanth, V., Sriram, S., Sowmiya, S. (2022). Application of arduino devices in various IoT application. Renewable and Nonrenewable Energy, 1: 39-45. https://doi.org/10.46632/rne/1/1/7