Perfecting of a Calibration Bed for Current Profilers
Mise au Point d’un Banc d’Étalonnage de Profileurs de Courant

Marc Le Menn* | Steffen Morvan
© 2020 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Current profilers are used in oceanography to measure the oceanic circulation but also in hydrology to calculate the flow of rivers. They allow the retrieval in velocity and direction of water masses profiles. The direction of the instrument is obtained via an electronic compass and tilt sensors, and the velocity by the measurement of the Doppler shift of acoustic pulses back scattered by particles located in water cells allocated along the measurement range of the instrument.
This paper presents a method developed to test the trueness of these velocity measurements in laboratory, from a spectral analysis of the emitted pulses and from the using of a frequency generator to simulate the received frequencies. Also, an assessment of the calibration uncertainty of this test is made, and the results obtained with different instruments are presented.
RÉSUMÉ :
les profileurs de courant sont utilisés en océanographie pour mesurer la circulation océanique mais aussi en hydrologie pour calculer le débit des fleuves.Ils permettent de retrouver le profil des masses d’eau en vitesse et direction. La direction de l’instrument est obtenue par un compas électronique et un capteur d’inclinaison, et la vitesse par la mesure du décalage Doppler d’impulsions acoustiques réfléchies par les particules situées dans des cellules d’eau réparties le long de l’étendue de mesure de l’instrument.
Ce papier présente une méthode developpée pour tester la justesse de ces mesures de vitesse en laboratoire, à partir de l’analyse spectrale des impulsions émises et de l’utilisation d’un générateur de fréquence pour simuler les fréquences reçues. De plus, une évaluation de l’incertitude de mesure de ce test est réalisée, et les résultats obtenus avec différents instruments sont présentés.
current meter, current profiler, Doppler effect, test, calibration, velocity measurement, oceanography, hydrology
Mots-clés :
Courantomètre, profileur de courant, effet Doppler, étalonnage, mesure de vitesse, océanographie, hydrologie
Les océans recouvrent 70,8% de la surface du globe. Ils régulent une grande partie du climat de la Terre à travers les échanges océan – atmosphère et les phénomènes comme El-Niño, les grands cycles et courants océaniques. Ces courants sont créés par le vent (en surface), mais surtout par des variations de masse volumique et de gravité. Leur mesure est essentielle pour établir des cartes utiles à la navigation, des modèles 3D de circulation océanique ou plus récemment, pour améliorer le rendement des hydroliennes et autres sources d’énergie renouvelable.
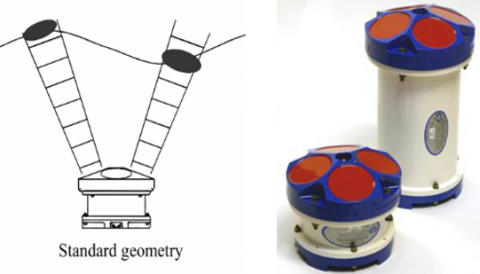
Les courantomètres à rotor ont été remplacés depuis une dizaine d’années, par des courantomètres acoustiques à effet Doppler. Le milieu marin étant propice à la propagation des ondes acoustiques, la mesure du temps de retour des impulsions réfléchies par les particules du milieu a permis la création de profileurs de courant. Placés dans la coque des navires océanographiques et dirigés vers le fond, ou placés dans des cages posées sur le fond et pointés vers la surface, ces instruments permettent d’obtenir des profils de vitesse de la colonne d’eau. Leur portée, qui dépend de la longueur d’onde de la source, va de quelques mètres à plusieurs centaines de mètres, selon les charges en particules. Ces profils sont découpés en cellules par le logiciel de l’instrument, qui fournit des valeurs de vitesses moyennes par cellule, en fonction des décalages Doppler mesurés.
Ces dernières années, l’étalonnage ou simplement le test de ces instruments, est resté un problème non traité dans les organismes océanographiques. Au Shom, une plateforme a d’abord été construite et mise en service en 2012, pour étalonner, dans leur configuration instrumentale d’utilisation, les compas et capteurs d’inclinaison dont ils sont dotés (voir [1-4]). Ces compas servent à retrouver la direction des instruments par rapport au Nord magnétique, les trois transducteurs dont ils sont équipés permettant de calculer la direction des courants dans le référentiel de l’instrument. Il restait à trouver une méthode pour déterminer la justesse des mesures de vitesse. Pour les courantomètres à rotor, cette détermination pouvait se faire en bassin de traction, par comparaison à la vitesse d’un chariot sur lequel ils étaient fixés. La gamme de vitesse de ces étalonnages était généralement limitée à 1 m/s. Compte tenu de la portée des profileurs et de la faible turbidité de l’eau des bassins, ces comparaisons n’étaient plus possible. Il restait la possibilité d’inter-comparaisons en mer, mais ces inter-comparaisons sont difficiles à mettre œuvre et elles sont couteuses : il faut trouver un endroit avec de fortes variations de courant, poser des lignes ou des cages de mouillage à partir d’un bateau, exploiter et interpréter les données.
L’idée est donc venue de mettre au point un banc de test constitué d’un transducteur acoustique que l’on pose successivement sur les transducteurs du profileur. Relié à un générateur de fréquence, il permet de simuler l’écho perçu par le profileur. L’exploitation de la formule de l’effet Doppler et des vitesses estimées par l’instrument, a permis de mettre au point une méthode de test de ses voies de mesure. Il restait à en faire un banc d’étalonnage.
Les profileurs de courant à trois transducteurs mesurent des vitesses $\left(V_{1}, V_{2}, V_{3}\right)$ dans l'axe de leurs faisceaux (1) Leurs émetteurs sont inclinés à $20^{\circ}, 25^{\circ}$ ou $30^{\circ}$ (angle $\beta$ ). Connaissant la valeur de $\beta,$ on peut calculer des vitesses $\left(V_{x}\right.$, $V_{y}, V_{z}$ ) dans leur repère propre, avec la matrice de transfert (1) [5]:
$\left[ \begin{matrix} {{V}_{x}} \\ {{V}_{y}} \\ {{V}_{z}} \\\end{matrix} \right]=\left[ \begin{matrix} \frac{2}{3\sin \left( \beta \right)} & \frac{-1}{3\sin \left( \beta \right)} & \frac{-1}{3\sin \left( \beta \right)} \\ 0 & \frac{-1}{\sqrt{2}\sin \left( \beta \right)} & \frac{1}{\sqrt{2}\sin \left( \beta \right)} \\ \frac{1}{3\cos \left( \beta \right)} & \frac{1}{3\cos \left( \beta \right)} & \frac{1}{3\cos \left( \beta \right)} \\\end{matrix} \right]\left[ \begin{matrix} {{V}_{1}} \\ {{V}_{2}} \\ {{V}_{3}} \\\end{matrix} \right]$ (1)
Ils sont équipés de compas du type ‘flux-gate’ pour retrouver l’amplitude des composantes (U, V, W) des courants par rapport au Nord magnétique (angle W), puis, connaissant la déclinaison magnétique, par rapport au Nord géographique (2). Ils sont, de plus, corrigés en inclinaison à l’aide de capteurs de ‘tilt’ qui mesurent les angles $\Psi$ et $\theta$ de roulis et tangage. Selon la référence [6], il existe entre 1 et 12 façons de définir une rotation dans les trois dimensions. Celle adoptée pour les profileurs est décrite par la matrice (2) [7]. Dans cette équation, C=cos et S=sin :
$\left[ \begin{matrix} U \\ V \\ W \\\end{matrix} \right]=\left[ \begin{matrix} {{C}_{\psi }}{{C}_{\Omega }} & (-{{S}_{\psi }}{{S}_{\theta }}{{C}_{\Omega }}+{{C}_{\theta }}{{S}_{\Omega }}) & ({{S}_{\psi }}{{C}_{\theta }}{{C}_{\Omega }}+{{S}_{\theta }}{{S}_{\Omega }}) \\ -{{C}_{\psi }}{{C}_{\Omega }} & ({{S}_{\psi }}{{S}_{\theta }}{{S}_{\Omega }}+{{C}_{\theta }}{{S}_{\Omega }}) & (-{{S}_{\psi }}{{C}_{\theta }}{{S}_{\Omega }}+{{S}_{\theta }}{{C}_{\Omega }}) \\ -{{S}_{\psi }} & -{{C}_{\psi }}{{S}_{\theta }} & {{C}_{\psi }}{{C}_{\theta }} \\\end{matrix} \right]\left[ \begin{matrix} {{V}_{x}} \\ {{V}_{y}} \\ {{V}_{z}} \\\end{matrix} \right]$ (2)
Les vitesses $\left(V_{1}, V_{2}, V_{3}\right)$ sont obtenues par mesure de l'effet Doppler après détection des échos produits par la réflexion des impulsions sur les couches successives de particules. Pour améliorer l'exactitude| des mesures, les impulsions sont répétées à une fréquence $f_{r .}$ La vitesse maximale mesurable $V_{\text {max}}$ dépend de $f_{r}$ et de la longueur d'onde $\lambda:$
$\pm V_{\max }=f_{x} \lambda / 4$ (3)
$f_{r}$ fixe également la portée maximale $r_{\max }$ à laquelle une cible peut être détectée sans ambiguité sur sa position:
$r_{\max }=c / 2 f_{x}$ (4)
c est la vitesse du son. Les relations (3) et (4) conduisent à exprimer la fonction d’ambiguïté portée-vitesse. Selon Lhermitte et Serafin [8] :
$V_{\max } r_{\max }=\pm c \lambda / 8$ (5)
Les profileurs conventionnels sont dits incohérents ou narrowband car les échos reçus de deux impulsions différentes ne sont pas corrélés. Ces échos sont mesurés en continu, ce qui permet de déterminer la taille des cellules de mesure dans la colonne d'eau, connaissant la valeur de $c$ et la durée $t_{p}$ des impulsions. La plus faible incertitude que l'on peut obtenir sur les mesures de $\left(V_{1}, V_{2}, V_{3}\right)$ est limitée par l'écart type du bruit Doppler $\sigma_{\delta}$ qui est inversement proportionnelle à $t_{p} .$ Ce bruit est généré par le déplacement aléatoire des particules. Pour diminuer l'incertitude, il faut multiplier le nombre $n$ d'impulsions. L'incertitude $\sigma_{V}$ sur des vitesses moyennes $V_{\mathrm{i}}, i \in[1,2,3],$ peut alors être réduite statistiquement:
$\sigma_{V}=\sigma_{\delta} / \sqrt{n}$ (6)
Une autre solution consiste à augmenter la valeur de tp, mais elle conduit à réduire la résolution spatiale. Pour surmonter cette ambiguïté, des profileurs dits ‘pulse-to-pulse coherent’ ou ‘pulse coherent’ ont été mis au point. Ils consistent à travailler sur des séries de deux impulsions cohérentes. Afin d’extraire le signal du bruit, la fonction autocovariance R(t) de ces 2 impulsions est calculée [8] :
$R(\tau)=C(t) C^{*}(t+\tau)$ (7)
Figure 1. Schéma d’un profil de mesure d’un profileur pointant vers la surface, et photo de profileurs de marque RD Instruments. Doc. Teledyne RD. Instruments
$C(t)$ est le signal reçu après l'émission de 2 impulsions successives et $C^{*}(t)$ son expression complexe conjuguée. $C(t)=I(t)+i Q(t)$ où $I(t)$ et $Q(t)$ sont les parties en phase et en quadrature du signal détecté. Pour optimiser l'extraction, l'autocovariance est estimée à partir de la réception de $M$ séquences de deux impulsions et de la moyenne de $M$ fonctions $R(\tau)[9] .$ Le plus souvent, la fréquence Doppler moyenne qui caractérise le décalage Doppler $\delta f$, est extraite de la phase $\phi \in[-\pi,+\pi]$ de cette fonction d'autocovariance moyenne. Si $f_{0}$ est la fréquence émise, la vitesse radiale mesurée est obtenue par la relation:
$V_{i}=\pm\left(\delta f_{i} c\right) /\left(2 f_{0}\right)$ (8)
Si tlest le temps correspondant à un aller-retour des impulsions, on a $2 \pi \delta f=\phi / t_{l}$. L’expression de la vitesse mesurée par les courantomètres devient [10] :
$V_{i}=\pm(\varnothing c) /\left(4 \pi f_{0} t_{l}\right)$ (9)
Au-delà de la complexité du traitement du signal réalisé par ces profileurs, sur le plan métrologique ce qu’il importe de connaître et de maîtriser, c’est la dérive éventuelle des mesures de fréquence ou de phase qui sont réalisées, l’effet Doppler étant un phénomène physique difficile à simuler. Cette dérive est conditionnée par la qualité de l’oscillateur qui se trouve dans l’instrument. Il est donc nécessaire de pouvoir comparer la fréquence f0 émise par le profileur, à une fréquence de référence. Or, leur logiciel ne donne accès qu’aux vitesses mesurées Vi ou à celles référencées.
Le constructeur de profileurs Teledyne RD Instruments propose dans une note technique [11], de placer un hydrophone sur les transducteurs de ses courantomètres, pour vérifier ou régler leur gain. L’idée est donc venue d’utiliser ce type d’hydrophone pour simuler la réception d’un écho, en le raccordant à un générateur de fréquence (voir Figure 2). L’impédance acoustique des matériaux constituant ces transducteurs étant très élevée, il est impossible de réaliser leur couplage en laissant de l’air entre les deux. Le contact transducteur – hydrophone a donc été assuré par un gel à base de silicone permettant de réaliser de l’étanchéité sous vide.
Figure 2. Hydrophone posé sur un profileur NORTEK 600 kHz et sur un profileur Workhorse RDI
Les courantomètres et profileurs à étalonner ayant des surfaces actives qui diffèrent selon les types d’instruments, il a été nécessaire également, d’utiliser deux types d’hydrophones plans. Le premier, que nous appellerons RDI, a un diamètre actif d de 27 mm. Pour le second, appelé UB-tr7 de la société Ubertone, il est de 7 mm. La fréquence des signaux à générer allant de 400 kHz à 2 MHz, les mesures se font en champ proche et la tache focale de ces sondes se situe à des distances variant de 8 à 48 mm selon la relation d²/4λ.
Connaissant la fréquence $f_{0}$ du signal sinusoidal transmis par les impulsions émises par le profileur, à partir de la relation (8) il est possible de déterminer une plage de variation de fréquence correspondant à sa plage de variation de vitesse. Il est possible également de déterminer un pas d'incrément de fréquence $\delta f_{r},$ connaissant la résolution en vitesse $\delta v$ de l'instrument. Le générateur est donc réglé pour envoyer une sinusoide de fréquence variable $f_{0} \pm k \delta f_{r},$ la valeur de $k$ permettant d'explorer la gamme de vitesse. Lorsque le transductedr du profileur bascule en récepteur, il voit cette sinusoide comme un retour d'impulsion. Lorsqu'il travaille en émetteur, ses impulsions se réfléchissent sur l'hydrophone, mais il ne peut pas les détecter comme des ondes retour tant qu'il n'est pas placé en récepteur et tant que le temps de retour de ces ondes se trouve dans la zone blanche. La zone blanche correspond au temps nécessaire pour stopper l'émission et basculer le transducteur en récepteur.
L’ensemble est piloté à distance par un programme développé sous le progiciel Labview. Il permet d’automatiser le test en décodant les messages des différents modèles de profileurs pour déterminer leur type, programmer leur configuration pour le test, extraire les valeurs de vitesse mesurées et piloter le générateur de fréquence.
L’utilisation d’un générateur de fréquence permet d’adapter la puissance du signal écouté par le profileur. Son réglage permet d’optimiser le bruit des mesures de vitesse, en prenant garde cependant, de ne pas saturer les voies de mesure. Des messages retournés par l’instrument, on peut extraire l'amplitude du signal (en count) reçue par chaque faisceau. En observant l’évolution du nombre de ‘count’ sur le long terme, il est possible de faire un suivi de l’évolution de la sensibilité du courantomètre, et donc de prévenir une dérive de son électronique d’amplification.
La relation (8) fait intervenir la vitesse du son c. Quand l’instrument est utilisé in situ, l’utilisateur peut forcer directement sa valeur en fonction du milieu ou passer par une relation de calcul basée sur des mesures de température et de pression. La question s’est posée de déterminer cette valeur dans le cas de ce banc de mesure. Trois types de gels de masse volumique différente ont été testés afin d’observer leur influence éventuelle sur c. Il est apparu qu’ils avaient une influence négligeable. La valeur de c a donc été fixée de façon à obtenir la plage d’excursion de vitesse la plus grande possible, tout en restant compatible avec des célérités océaniques. La valeur $1525 \mathrm{m} / \mathrm{s}$ qui a été choisie, permet d'obtenir la réponse des profileurs dans la gamme $\pm 6 \mathrm{m} / \mathrm{s},$ à l'exception des versions appelées DeepWater 2000,3000 et $6000 \mathrm{m},$ dont la fréquence de répétition des impulsions limite la gamme à $\pm 2 \mathrm{m} / \mathrm{s},$ selon la relation (3). Cette valeur est programmée dans l'instrument et prise en compte dans le programme Labview pour calculer une vitesse de référence $V_{r e f}$.
L'étalonnage consiste à calculer un écart de vitesse $\delta v$ tel que
$\delta v=V_{r e f}-V_{i}=(c / 2)\left(\delta f_{r e f}-\delta f_{i}\right) / f_{0}$ (10)
avec $\delta f_{r e f}=k \delta f_{r} . \delta f_{i}$ est définit par la relation (8), 1 'indice désignant le numéro du transducteur de l'instrument à tester.
Les oscillateurs se trouvant dans les courantomètres peuvent dériver dans le temps et en fonction de la température. Pour exploiter les relations (8) et (10), un premier problème consiste donc à déterminer la valeur de f0. Le constructeur Nortek précise dans sa documentation qu’un certain nombre de paramètres, utilisés dans les calculs de vitesse, ont des valeurs fixes dans l’instrument. La fréquence des transducteurs en fait partie. Il précise également que l’exactitude des mesures de vitesse est de 1% de la valeur mesurée + 5 mm/s. Cette exactitude est probablement majorée du fait de la mauvaise connaissance de la célérité du milieu au moment des mesures, l’influence de celle-ci étant de l’ordre de 1% sur les vitesses mesurées. Il s’agit donc d’une tolérance maximale.
A partir de la relation (8), on peut constater que les variations relatives de f0 sont proportionnelles aux variations relatives de v. Une erreur de 0,1% sur f0 correspondrait à une erreur de 3 mm/s sur une vitesse de 3 m/s, ce qui reste inférieur à la tolérance du fabricant. 0,1% correspondrait à une erreur de 400 Hz pour un 400 kHz, et 2000 Hz pour un 2 MHz. Sachant que les écarts constatés sur f0 sont en général inférieurs à 0,02%, l’influence de la connaissance exacte de sa valeur sur la mesure de vitesse est donc négligeable.
Les variables de la relation (10) étant indépendantes entre-elles, en prenant l’hypothèse faite dans le guide en référence [12] d’une influence négligeable de la non-linéarité de la relation (10), l’incertitude sur les écarts de vitesse obtenus durant l’étalonnage, peut être évaluée avec la relation suivante :
$u_{\delta v}^{2}=\left(\frac{\partial \delta v}{\delta f_{r e f}}\right)^{2} \cdot u_{\delta f r e f}^{2}+\left(\frac{\partial \delta v}{\delta f_{i}}\right)^{2} \cdot u_{\delta f i}^{2}+\left(\frac{\partial \delta v}{\delta f_{0}}\right)^{2} \cdot u_{f 0}^{2}$ (11)
en considérant que c est une constante fixée pour le calcul. $u_{\delta f r e f}$ désigne l'incertitude sur la fréquence générée, $u_{\delta f}$ l'incertitude sur la mesure du décalage Doppler par 1'instrument, et $u_{\delta f 0}$ l'incertitude sur la fréquence émise. La relation (11) donne:
$u_{\delta v}^{2}=\left(\frac{c}{2 f_{0}}\right)^{2} \cdot\left[u_{\delta f r e f}^{2}+u_{\delta f i}^{2}\right]+\left(\frac{\delta v}{f_{0}}\right)^{2} \cdot u_{f 0}^{2}$ (12)
Dans la relation (12), $u_{\delta f i}$ peut être évaluée en prenant en compte la tolérance maximale donnée par le fabricant. A partir de la relation (8) on peut écrire :
$u_{\delta f i}=\frac{2 u_{v i} f_{0}}{c}$ (13)
uvi étant l’incertitude sur la vitesse fournie par le transducteur i de l’instrument. L’expression (12) devient alors :
$u_{\delta v}^{2}=\left(\frac{c}{2 f_{0}}\right)^{2} \cdot u_{\delta f r e f}^{2}+u_{v i}^{2}+\left(\frac{\delta v}{f_{0}}\right)^{2} \cdot u_{f 0}^{2}$ (14)
Comme expliqué au paragraphe 5, il a été nécessaire de mesurer f0, afin d’éliminer les erreurs liées au principe du test, sur la mesure de l’effet Doppler. uf0 représente alors l’incertitude type de cette mesure par un fréquencemètre. Sa valeur a été évaluée à 0,5 Hz. $u_{\delta f r e f}$ a également été évaluée à 0,5 Hz. Les chiffres donnés par le fabriquant concernant l’exactitude des mesures étant considérés comme une tolérance maximale, uv a été évalué en les divisant par racine de 3, selon les règles du document en référence [12]. Malgré cette division, les calculs montrent que cette source d’incertitude reste largement dominante par rapport aux autres.
Pour réaliser ces tests, les profileurs ont été configurés en fixant leur temps d’intégration à 1 s, une zone blanche minimale et une seule cellule de mesure. Fixer une seule cellule permet de réduire la durée du test.
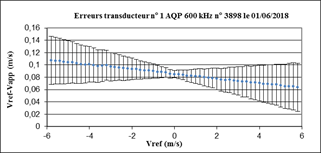
Dans un premier temps, la fréquence centrale envoyée par le générateur a été fixée en fonction des fréquences sur lesquelles les profileurs étaient censés émettre : 400 kHz, 600 kHz, 1 MHz ou 2 Mhz selon leur type et donc leur portée. Il est apparu que les courbes d’écart obtenues présentaient des offsets et des pentes variables selon les instruments (voir Figure 3).
Figure 3. Exemple de courbe d’erreur obtenue initialement sur un profileur 600 kHz. Les barres d’erreur représentent l’incertitude élargie (à 2s) sur $\delta v$, qui est fonction de la vitesse mesurée
Afin de lever le doute sur l’origine de ces décalages, des mesures ont été faites en faisant varier progressivement la fréquence f0 émise par le générateur, afin d’observer son influence sur l’offset. Cette influence étant notable, l’hydrophone a été utilisé en récepteur et raccordé à un oscilloscope. L’analyse fréquentielle des impulsions émises par les profileurs, a permis de mettre en évidence des décalages de fréquence de quelques hertz à quelques dizaines de hertz et de mesurer avec exactitude les fréquences des impulsions émises par les courantomètres.
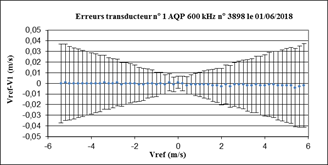
Figure 4. Exemple de courbe d’erreur obtenue avec le profileur 600 kHz n° 3898, après mesure de sa fréquence. Les barres d’erreur représentent l’incertitude élargie (à 2s) sur $\delta v$, qui est fonction de la vitesse mesurée
En fait, si l’influence de la connaissance exacte de la valeur de f0 sur la mesure de vitesse est négligeable, durant ce test il est nécessaire de la connaître pour évaluer l’exactitude de la mesure du décalage Doppler réalisé par l’instrument. Un décalage du générateur de fréquence par rapport à la fréquence générée par l’instrument, se traduit par la courbe d’erreur de la Figure 3. Sur cette figure et les suivantes, les barres d’erreurs représentent l'incertitude des mesures avec un coefficient d’élargissement de 2. La Figure 4 montre le résultat obtenu sur le profileur n° 3898, après alignement de la fréquence émise par le générateur sur celle du profileur.
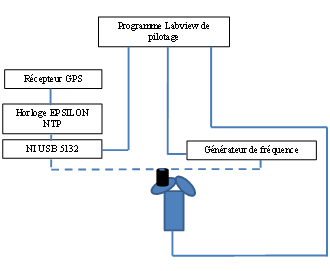
La chaine de mesure, la procédure d’étalonnage et le programme Labview ont donc été modifiés pour tenir compte de ces décalages, propres aux oscillateurs des profileurs. Une carte de numérisation NI USB 5132 a été achetée. Afin de garantir sa stabilité et son exactitude en fréquence, elle a été raccordée à une horloge externe du type Epsilon NTP contenant un oscillateur contrôlé en tension (OCXO à 10 MHz), synchronisée à un signal du GPS (voir Figure 5). Le temps du réseau des satellites du GPS étant relié et recalé périodiquement au temps UTC du réseau des observatoires terrestres de référence [13], le temps et les fréquences du GPS sont des références qui permettent le raccordement direct au Système International d’unité (SI) des mesures qui sont réalisées.
Figure 5. Schéma de principe du banc d’étalonnage
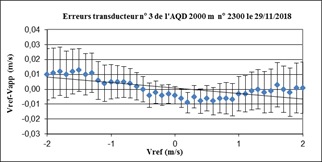
Figure 6. Exemple de transducteur présentant une erreur de pente
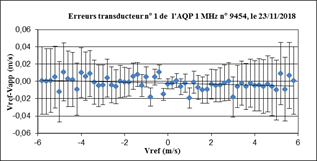
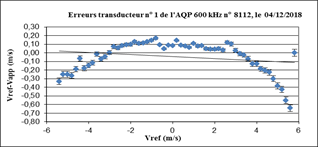
Comme preuve de son bon fonctionnement, ce banc de test a permis la détection de défauts sur certains instruments. De légers défauts de pente ont été trouvés, comme sur le transducteur n° 3 de l’AQD 2000 m n° 2300 (Figure 6), alors que les transducteurs n° 1 et 2 de cet instrument présentent une réponse centrée sur 0. Un défaut plus courant concerne le bruit de mesure comme pour le transducteur n° 1 de l’AQP 1 MHz n° 9454 (Figure 7). Enfin, un instrument a été trouvé ‘en panne’ concernant ses transducteurs n° 1 et 2, alors que son transducteur n° 3 présentait une réponse dans les tolérances (Figure 8).
Figure 7. Exemple de bruit détecté sur un transducteur
Figure 8. Exemple de transducteur en panne
Les profileurs de courant sont des instruments utilisés couramment et en quantité par les organismes pratiquant de l’hydrologie fluviale ou de l’océanographie, mais ils faisaient l’objet de peu de contrôles métrologiques, en particulier à cause de la complexité de leurs algorithmes de fonctionnement. La méthode mise au point et le logiciel d’automatisation développés, permettent d’interfacer et d’étalonner tous les profileurs et courantomètres de la gamme Nortek et une partie de ceux du constructeur Teledyne RD Instrument.
Ce banc de test et d’étalonnage a permis de mieux connaître ces profileurs de courant, et en particulier de se rendre compte que la plage de vitesse donnée dans les documentations, dépend de la célérité du milieu. Il a permis de constater également que les mesures de l’effet Doppler sont d’une grande fiabilité. Leur incertitude de mesure in situ, dépendent avant tout de l’exactitude de la détermination de la célérité du milieu et des charges en particules sur le trajet des faisceaux. Enfin, il a surtout permis de détecter des anomalies sur quelques instruments, avant leur mise à l’eau.
[1] Le Menn, M., Pacaud, L. (2015). Calibration of currentmeters in direction: results obtained on a stock of instruments with a new calibration platform. EDP Science, Web of Conference et actes, 17th International Congress of Metrology, Paris. https://doi.org/10.1051/metrology/20150001002
[2] Le Menn, M., Lusven, A., Bongiovanni, E., Le Dû, P., Rouxel, D., Lucas, S., Pacaud, L. (2014). Current profilers and currentmeters compass and tilt sensors errors and calibration. Meas. Sci. Technol., 25(8): 1-6. http://dx.doi.org/10.1088/0957-0233/25/8/085801
[3] Le Menn, M., Lusven, A., Bongiovanni, E., Le Dû, P., Rouxel, D., Lucas, S., Pacaud, L. (2013). Erreurs angulaires des ADP et ADCP et correction de ces erreurs. Instrumentation et Interdisciplinarité. Capteurs Chimiques et Physiques. EDP Sciences, 197-204. ISBN : 978-2-7598-1116-8
[4] Le Menn, M., Le Goff, M. (2007). A method for absolute calibration of compasses. Meas. Sci. Technol., 18: 1614-1621. https://dx.doi.org/10.1088/0957-0233/18/5/053
[5] Cabrera, R., Huhta, C., Lohrmann, A. (1995). A new acoustic doppler current profiler for shallow water. 'Challenges of Our Changing Global Environment'. Conference Proceedings. OCEANS '95 MTS/IEEE, San Diego, California, USA. http://dx.doi.org/10.1109/OCEANS.1995.528615
[6] Wertz, J.R. (1978). Spacecraft Attitude Determination and Control. Kluwer Academic Press. http://dx.doi.org/10.1007/978-94-009-9907-7
[7] Alderson, S.G., Cunningham, S.A. (1999). Velocity errors in acoustic Doppler current profiler measurements due to platform attitude variations and their effect on volume transport estimates. J. of Ocean. and Atm. Technol., 16: 96-106. http://dx.doi.org/10.1175/1520-0426(1999)016%3C0096:VEIADC%3E2.0.CO;2
[8] Lhermitte, R., Serafin, R. (1984). Pulse-to-pulse coherent Doppler sonar signal processing techniques. J. of Atm. and Ocean. Technol., 1(4): 293-308. http://dx.doi.org/10.1175/1520-0426(1984)001%3C0293:PTPCDS%3E2.0.CO;2
[9] Dillon, J., Zedel, L., Hay, A.E. (2012). Simultaneous velocity ambiguity resolution and noise suppression for multifrequency coherent doppler sonar. J. of Atm. and Ocean. Technol., 29: 450-463. http://dx.doi.org/10.1175/JTECH-D-11-00069.1
[10] Lohrmann, A., Hackett, B., Roed, L.P. (1990). High resolution measurements of turbulence, velocity and stress using a pulse-to-pulse coherent sonar. J. of Atm. and Ocean. Technol., 7: 19-37. http://dx.doi.org/10.1175/1520-0426(1990)007%3C0019:HRMOTV%3E2.0.CO;2
[11] RD Instruments (1999), Technical note FST 004.
[12] BIPM (2008). Evaluation of measurement data – Guide to the expression of uncertainty in measurement. JCGM 100:2008, GUM 1995 with minor corrections.
[13] Le Menn, (2012). Instrumentation and Metrology in Oceanography. ISTE–WILEY, 38-42. http://dx.doi.org/10.1002/9781118561959