Karima Ghlam*![]() | Mimouna Oukli
| Mimouna Oukli![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
Rotary Electromagnetic Micromotors (REM) are miniature motors that operate based on the principles of electromagnetic interactions. They hold great potential for various applications in microelectromechanical systems (MEMS), offering precise rotary motion at a microscale level. REM micromotors are still in the introductory stages of development, and extensive research and development efforts are ongoing to enhance their performance and address various technical challenges. The technical literature in this area is relatively limited, indicating that REM technology is still an emerging field with considerable scope for exploration and innovation. In this article, we present REM MEMS as quoted in academic articles and explore their presence in the REM market. Given that most articles on REM MEMS do not provide parameter values, we proceeded to assess the performance parameters of 84 market DC micromotors. These evaluations covered a range of 19 weight scales (from 0.35 g to 16.1 g) and diameter scales (from 4 mm to 26 mm). The specific micromotors chosen for the analysis were from Maxon and Faulhaber, two well-known and reputable manufacturers in the field of micromotors. Consequently, we conducted a comparison of the operating parameters of the micromotors, specifically focusing on the ratios of mass to output power and torque, as well as the ratios of energy efficiency to output power and torque. Power and torque are fundamental measurements used to evaluate the performance of REM motors in the market. These curves and correlation coefficients can serve as a valuable reference for engineers and designers when making informed decisions regarding motor selection for specific applications.
micromotors, miromachines, MEMS, microfabrication, Market micromotor, rotatory electromagnetic micromotor. performance analysis
Currently, REM micromotors are in a progressive stage of development and research. While the technical literature in this field may not be extensive, REM technology has shown immense promise in revolutionizing microelectromechanical systems (MEMS) and enabling precise motion control in miniaturized devices. REMs are finding various applications in robotics, medical instruments, and other fields due to advancements in micromachining technology [1, 2]. REMs are classified as small, medium, big, and micromotors, with the latter being a result of advanced technology. REMs are microelectromechanical device which is mainly used for energy conversion between mechanical and electrical Domains [3]. They generate mechanical energy through an electromagnetic actuator by producing a force from a magnetic field or varying reluctivity of the magnetic circuit [4].
The smallest commercial REMs, as defined in 1977, have a weight of 30 g and a size of 25×20mm. Miniaturization of REMs progressed with MicroElectroMechanical Systems (MEMS) processes in the 1990s [5, 6] and have become crucial components in minimal-invasive surgery, datacom, and positioning drives [3]. In 1999, High-precision motors in the millimeter range are key elements of micro-scanners in minimally invasive diagnostics and surgery as well as in data communication or positioning drives [7, 8]. In 2002, the external dimensions of the actuator using the electromagnetic principle are in the order of a few millimeters [4]. Another definition, the REM is a very small electromechanical device (1 μm to 1 cm) [9], The overall size of a microactuator system is typically in the range of a few centimeters, while important structures are in the micrometer range [10]. In 2020, The term "micromotor" actually includes relatively small motors ranging in size from microns to millimeters or larger [2]. The total size of a REM system ranges from several centimeters, with essential structures in the micrometer range. The definition of a REM can vary due to the existence of different types, and the length of a REM is not fixed.
The global micromotors market size was valued at USD 38.79 billion in 2021 [11], reflecting the high demand for miniaturized electromagnetism motors [8, 12] in various industries such as consumption, office, computer, home appliance, medical treatment, and industrial control. The market has grown thanks to the miniaturization processes that have led to the production of these motors with small volume, high efficiency, high torque, convenient control, and low cost [13]. The micro motor market is also driven by the established silicon manufacturing, and development infrastructure, and expertise in the field of MEMS (Micro Electro Mechanical Systems) [9].
Life processes span over 27 orders of magnitude on the mass scale, from molecules to whales. The identified scaling laws are related to several different mass processes. Recent findings describe a scaling law for the peak specific force of both biological and engineering actuators, where motor force scales either allometrically with the motor cross section or isometrically with the motor mass [12].
On the other hand, the electromagnetic structure of micro-actuators is significantly different from traditional motors [10]. Its being very necessary to present an analysis of a sample micromotors manufactured in series, because the technical literature is not very rich in this area of research.
A comparative study is conducted among several micromotors from manufacturers Faulhaber and Maxon. The aim is to analyze and compare the technologies, particularly through the implementation of regression models. The objective is to estimate the influence of motor mass, efficiency, and mass-to-power ratio on power and torque requirements, with the goal of assisting in the selection of a mass-to-power ratio.
Electromagnetic micromotors are available in various types, including DC micromotors, AC micromotors, which are used for a variety of applications in industry and research. Some of the major application areas for small-scale actuators include microfluidic systems, positioning systems, and robotic manipulators [14]. Microelectromechanical systems have attracted intense research interest for decades due to their promising applications in various research fields including electronic chemical and biomedical [15] Micromotors have much potential to revolutionize current micromachine technologies, such as a narrow space inspection and minimally invasive diagnoses and treatments [2].
By design and operating principle, there are three main types: brushed and brushless DC micromotor [16], asynchronous micromotor, and synchronous micromotor. According to the design of the armature, brushed and brushless DC micromotor are divided into three types: drum armature, non-magnetic cylindrical armature and disk armature. Depending on the design, there are three types of asynchronous micromotors: squirrel-cage rotor, non-magnetic cylindrical rotor, magnetic cylindrical rotor. The most widespread synchronous micromotors with variable reluctance, hysteresis, active rotor [4].
The electromagnetic design of microactuators differs significantly from that of conventional motors in at least two respects: the use of microfabrication which allows the design of completely new topologies of the active part that could not – or not economically – be manufactured from currently used iron and copper wire. However, the physical properties of micro-manufactured magnetic materials can differ significantly from those of conventional iron lamination or permanent magnets. The laws of growth have certain consequences to be taken into account when designing microactuators: For example, the influences of mechanical friction and the ohmic resistance of the windings are of increasing importance [10].
2.1 MEMS REM
The development of microelectromechanical systems (MEMS) offers many advantages, including the ability to downscale and integrate with an integrated circuit [17]. To fully realize the potential of these systems, a new area of micro science and engineering must be established. This field can benefit from knowledge across a wide range of disciplines, including material science, process engineering, device fabrication, system design, and control, as well as various application fields [18].
In recent years, advances have been made in the manufacture of magnetic micro-actuators using techniques such as surface micromachining, silicon fusion bonding, LIGA-based processes, and standard IC processing techniques [19]. Progress has also been made in the use of UV depth lithography [9], technical micro electroplating, and micro-machined polymer magnets [14]. A number of studies have been conducted on electromagnetic micromotor technologies, and examples of prototypes can be found in published literature, including quantitative information on their geometric dimensions, structures, and fabrication methods. Examples of prototypes of micromotor are listed in Table 1.
2.2 Market REM
The commercialization of micromotors fabricated using advanced micromachining techniques highlights the growing demand for these motors. Magnetic micromotors, in particular, are highly sought after for applications where dimensions are larger than a few millimeters. In the market, the focus is on rotary electric motors produced by leading small motor manufacturers such as Maxon motor and Faulhaber motor. These companies specialize in high-end micro motors and provide a wide range of options to meet the varying needs of different industries.
Table 1. Quantitative liste of Rotary electromagnetic micromotors
|
Reference |
Micromotor Type |
Rotor |
Stator |
Micromotor Diameter |
|
[3] |
axial-flux |
Silicon and PM NdFeB |
planar copper micro coils |
10 mm |
|
[9] |
PM brushless |
PM (NdFeB) |
slotless stator winding |
1.9 mm |
|
[14, 15] |
synchronous |
polymer magnet and SU-8 form |
double layer spiral coil |
4.5 mm |
|
[5] |
PM synchronous |
PM NdFeB |
flexible print circuit |
1 mm and 1.5 mm |
The purpose of the micromotor selection criteria is to provide guidelines and criteria for choosing the most suitable micromotor for a specific application. These criteria consider factors such as power requirements, torque output, efficiency, size, weight, and other performance parameters. By using these selection criteria, engineers and designers can make informed decisions to ensure optimal performance and efficiency of the micromotor in their intended application.
The main criteria that define micromotor selection in electric microsystems design is: output power (Pout) or torque required as calculated by the maximum of operated loading devices. A motor converts an electrical input power (Pin):
$P_{\text {in }}=\mathrm{V}^* I_a$ (1)
$I_a$ the armature current, and V the terminal (input) voltage. In addition, a mechanical output power is:
$P_{\text {out }}=\Omega^* T_{\text {sh }}=\eta^* P_{\text {in }}$ (2)
where, Tsh is the shaft (output) torque, and η is the efficiency.
The data included in this study consists of 84 motors covering 19 weight scales (from 0.35 g to 16.1 g) and diameter scales (from 4 mm to 26 mm). The specific micromotors data chosen for the analysis were sourced from the catalogs of Maxon and Faulhaber, which are renowned and highly regarded manufacturers in the field of micromotors.
Tables 2 and 3 summarize the output power, stall torque, mass, and diameter of the RE, DCX, and ECX ranges of micromotors from Maxon and DCM, FDC, and BDC ranges of micromotors from Faulhaber. The values were taken from specifications provided by the two companies and cover a range of weight and diameter scales.
The motors chosen from Maxon include DCX and RE range (brush commutator micromotors) and ECX range (brushless DC micromotors). The ranges from Faulhaber include dc motors (DCM) with precious metal commutation, flat dc micromotors (FDC) with ironless rotor, and brushless dc micromotor (BDC) with NdeFeB magnet. The tables provide a useful summary of the different types of micromotors available and can be used in electric microsystems design to determine the best fit based on the required output power or torque.
Table 2. Three ranges of motors manufactured by Maxon
|
Gamme |
Diameter mm |
Output Power W |
Stall Torque Mn.m |
Mass g |
|
DCX |
6-10 |
0.1601-0.4654 |
0.309-0.905 |
2.4-6.3 |
|
RE |
6-10 |
0.1479- 0.3832 |
0.302-0.800 |
2.3-7 |
|
ECX |
4-8 |
0.2900- 3.4374 |
0.229-1.26 |
1.2-6 |
Table 3. Three ranges of motors manufactured by Faulhaber
|
Gamme |
Diameter mm |
Output Power W |
Stall Torque Mn.m |
Mass g |
|
DCM |
6-10 |
0.11-0.42 |
0.11-0.48 |
2-6.5 |
|
FDC |
15-26 |
0.15- 1.1 |
0.29-3.4 |
4.316.1 |
|
BDC |
12-22 |
2.782-15.732 |
1.97-26.2 |
0.35-9.4 |
The data collected from the micromotors will be used in the analysis to evaluate and compare various performance parameters such as efficiency, mass, mass-to-power ratio, and torque. By analyzing this data, we aim to gain insights into the characteristics. Additionally, the data will be utilized in regression models and statistical analysis techniques to derive meaningful conclusions and draw comparisons between different micromotors.
The analysis conducted in this study has revealed valuable findings regarding the characteristics and trade-offs of different types of micromotors. It is worth noting that the efficiency, power, torque, and weight of a micromotor can vary significantly based on factors such as design and manufacturing processes. And then a MATLAB program is used to formalize the relationship and evaluate statistical criteria, specifically the "goodness of fit.
Figure 1. Motor efficiency (%) versus Motor output power (w) for a variety of micromotors
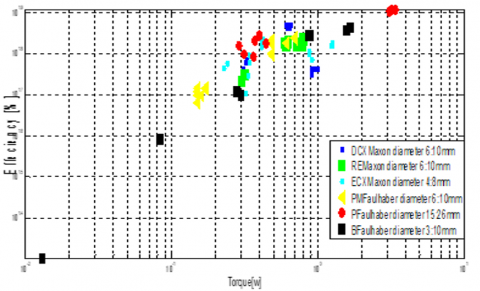
Figure 2. Motor efficiency (%) versus motor torque (w) for a variety of micromotors
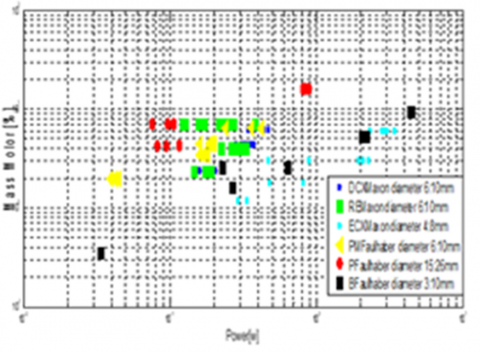
Figure 3. Motor mass (g) versus Motor output power (w) for a variety of micromotors
Figure 4. Motor mass (g) versus motor torque (mN.m) for a variety of micromotors
Figure 5. Mass to the output power (g/w) versus motor output power (w) for a variety of micromotors
Figure 6. Mass to the torque (g/mN.m) versus Motor torque (mN.m) for a variety of micromotors
The relationship of energy efficiency to motor output power, and torque is shown in Figures 1 and 2. In addition, the relationship of the mass to the output power and the torque respectively is shown in Figures 3 and 4. Finally, Weight to power ratio and weight to torque ratio respectively are shown in Figures 5 and 6.
These graphs provide valuable insights into the characteristics and trade-offs of different types of micromotors and can be used by engineers and designers to make informed decisions on motor selection for their specific applications. It should be noted that the efficiency, power, torque, and weight of a micromotor can vary greatly depending on factors such as the design, manufacturing process.
Therefore, it is important to carefully consider the requirements of each specific application and choose a motor that meets those requirements while also considering trade-offs such as energy efficiency, size, and weight. The results of this study provide a valuable reference for designers and engineers to make informed decisions on the selection of micromotors for their specific applications.
This analysis helps to better understand the relationship between the efficiency, output power, torque, mass, and diameter of different types of micromotors and to make informed decisions on the selection of the best motor for specific applications. The results of the analysis which are presented in Tables 4, 5, and 6 can be used to compare the performance of different types of motors and to identify trends in the data.
The $R^2$ value helps to determine the accuracy of the model and a value close to unity indicates a good fit. The analysis of covariance allows for a comparison of the regression lines [20] for different types of motors and provides a more detailed understanding of the relationships between the various parameters.
Table 4. Regression coefficients of energy efficiency versus motor output power, and torque respectively
|
Range Micromotor |
R2 (P, µ) |
R2 (T, µ) |
|
DCX |
0.0002018 |
0.04928 |
|
RE |
0.2424 |
0.8425 |
|
ECX |
0.507 |
0.2548 |
|
DCM |
0.4303 |
0.934 |
|
FDC |
0.9104 |
0.91 |
|
BDC |
0.6681 |
0.7387 |
Table 5. Regression coefficients of the mass versus output power and the torque respectively
|
Range Micromotor |
R2 (P, m) |
R2 (T, m) |
|
DCX |
0.833 |
0.9922 |
|
RE |
0.0004668 |
0.8824 |
|
ECX |
0.8133 |
0.8653 |
|
DCM |
0.8536 |
0.4058 |
|
FDC |
0.9424 |
0.9422 |
|
BDC |
0.9795 |
0.9912 |
Table 6. Regression coefficients of the weight to power ratio and weight to torque ratio according power and torque respectively
|
Range Micromotor |
R2 (P, m/P) |
R2 (T, m/T) |
|
DCX |
0.07567 |
0.6762 |
|
RE |
0.3553 |
0.359 |
|
ECX |
0.5241 |
0.1583 |
|
DCM |
0.667 |
0.6137 |
|
FDC |
0.6438 |
0.6442 |
|
BDC |
0.5726 |
0.4992 |
Here is the comparative analysis of micromotors types according to their curves’s regression coefficient:
• The micromotors (ECX, BDC) have a significant strong positive correlation between (1) mass and power, (2) mass and torque, as it is shown in Figures 3 and 4. The BDC curve is shifted forward ECX curve.
• The micromotors (DCX, RE, DCM, and FDC) have a significant positive strong correlation between the mass and the torque only for the three micromotors (DCX, RE, and FDC), while the FDC micromotor’s positive correlation is weak. As it is shown in Figure 4.
• The micromotors (DCX, DCM) have a significant positive strong correlation between the mass and power, and their slope is different. While the slope DCX is bigger than DCM. As it is shown in Figure 3.
• The micromotors (RE, FDC) have a significant positive strong correlation between the (1) efficiency and the torque, (2) the mass and the torque. The slope RE is bigger than FDC. As it is shown in Figures 2 and 4.
• The micromotors (DCX, RE, ECX, DCM, FDC, and BDC) in Figure 4 have a significant positive strong correlation between the mass and torque for all ranges of micromotors except the DCM range. As it is shown in Figure 4.
The slope variation is due to the difference in mass, power, efficiency and torque of micromotors. According to the results of the curves and the coefficients of correlation the best relationships to carry out a comparative study of micromotors are motor mass versus motor output power, motor mass versus motor torque, and motor efficiency versus motor torque (Figures 2, 3, and 4).
The other curves present the relationships of energy efficiency versus motor output power, weight to power ratio versus weight to torque ratio in terms of power and torque respectively (Figures 1, 5, and 6). Those figures show more dispersion which means a weak positive correlation.
The analysis of micromotors performance shows that scaling laws provide a good fit for the quantities of interest in this ranges of micromotors. However, the results from Figures 1, 5, 6 indicate that for the microscale, further in-depth studies and additional parameters are needed to find a suitable scaling law.
The study of micromotors, comparative analysis is necessary to choose between different types. We need to present characteristic curves based on the following parameters: torque, mass, power, efficiency, mass-to-output power ratio, and mass-to-torque ratio. The analysis of micromotors performance shows that scaling laws provide a good fit for the quantities of interest. Consequently, the analysis of the curves was carried out using the MATLAB program, where the relationships are formalized and statistical criteria, such as the "goodness of fit," are evaluated.
Based on the curve results and correlation coefficients, the most suitable relationships for conducting a comparative study of micromotors are motor mass versus motor output power, motor mass versus motor torque, and motor efficiency versus motor torque (Figures 2, 3 and 4). The curves and their coefficients of correlation can be used as a reference for engineers and designers to make informed decisions on motor selection for specific applications.
However, the other curves depicting energy efficiency versus motor output power and weight-to-power ratio versus weight-to-torque ratio (Figures 1, 5 and 6) exhibit more dispersion, indicating a weak positive correlation.
Based on the analysis of micromotor performance, it is evident that scaling laws offer a suitable fit for the quantities of interest within the range of micromotors studied. Nevertheless, the results from Figures 1, 5 and 6 suggest that when dealing with the microscale, more comprehensive studies and additional parameters are required to identify an appropriate scaling law.
[1] Shyamal, K.R. (2015). A survey mems micromotor assemblies & applications. International Journal of Engineering Research and General Science, 3(3): 59-62.
[2] Mashimo, T., Izuhara, S. (2020). Review: Recent advances in micromotors. IEEE Access, 8: 213489-213501. https://doi.org/10.1109/ACCESS.2020.3041457
[3] Ghalichechian, N., Modafe, A., Beyaz, M.I., Ghodssi, R. (2008). Design, fabrication, and characterization of a rotary micromotor supported on microball bearings. Journal of Microelectromechanical Systems, 17(3): 632-642. https://doi.org/10.1109/JMEMS.2008.916346
[4] Hameyer, K., Nienhaus, M. (2002). Electromagnetic actuators-current developments and examples. In 8th International Conference on New Actuators, pp. 170-175.
[5] Pang, D.C., Lai, Y.W. (2017). Rapid prototyping of a micromotor with an optical rotary encoder. Micromachines, 8(6): 174. https://doi.org/10.3390/mi8060174
[6] Ambedkar, B.R. (2020). Microelectromechanical system. Technical Report. https://doi.org/10.13140/RG.2.2.27193.60008
[7] Fujita, H. (1998). Microactuators and micromachines. Proceedings of the IEEE, 86(8): 1721-1732. https://doi.org/10.1109/5.704278
[8] Michel, F., Ehrfeld, W. (1999). Mechatronic micro devices. In MHS'99. Proceedings of 1999 International Symposium on Micromechatronics and Human Science (Cat. No. 99TH8478), Nagoya, Japan, pp. 27-34. https://doi.org/10.1109/MHS.1999.819978
[9] Gieras, J.F. (2010). Permanent Magnet Motor Technology: Design and Applications. 3rd ed., Taylor and Francis Group, LLC.
[10] Büttgenbach, S., Burisch, A., Hesselbach, J. (2011). Electromagnetic design of microactuators. In: Büttgenbach, S., Burisch, A., Hesselbach, J. (eds) Design and Manufacturing of Active Microsystems. Microtechnology and MEMS. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-12903-2_2
[11] Precedence Research. Micro motor Market. https://www.precedenceresearch.com/micro-motor-market.
[12] Dermitzakis, K., Carbajal, J.P., Marden, J.H. (2011). Scaling laws in robotics. Procedia Computer Science, 7: 250-252. https://doi.org/10.1016/j.procs.2011.09.038
[13] Shen, H., Lei, Q., Chen, W. (2017). Modeling and simulation for micro DC motor based on simulink. In IOP Conference Series: Materials Science and Engineering, 242(1): 012079. https://doi.org/10.1088/1757-899X/242/1/012079
[14] Al-Halhouli, A., Demming, S., Waldschik, A., Büttgenbach, S. (2014). Implementation of synchronous micromotor in developing integrated microfluidic systems. Micromachines, 5(3): 442-456. https://doi.org/10.3390/mi5030442
[15] Büttgenbach, S. (2014). Electromagnetic micromotors—Design, fabrication and applications. Micromachines, 5(4): 929-942. https://doi.org/10.3390/mi5040929
[16] Karima, G., Mimouna, O. (2023). Characterization of the direct current micromotor by Simscape. Journal of Intelligent Systems and Control, 2(1): 47-53. https://doi.org/10.56578/jisc020105
[17] Pan, C.T., Wu, T.T. (2006). Development of a rotary electromagnetic microgenerator. Journal of Micromechanics and Microengineering, 17(1): 120. https://doi.org/10.1088/0960-1317/17/1/016
[18] Özkaya, K.Y., Beyaz, M.İ. (2015). An investigation on the electromagnetic design optimization of rotary micromachines with double-layer permanent magnets. Sensors and Actuators A: Physical, 222: 335-340. https://doi.org/10.1016/j.sna.2014.12.025
[19] Fujita, H. (1998). Microactuators and micromachines. Proceedings of the IEEE, 86(8): 1721-1732. https://doi.org/10.1109/5.704278
[20] Karima, G., Mimouna, O. (2019). Study of eddy current characterization in waste particles. Advances in Modelling and Analysis C, 74(2-4): 103-107. https://doi.org/10.18280/ama_c.742-409