Noaman M. Noaman![]()
© 2023 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
A linear control system can be controlled by using the conventional controller after formulating a mathematical model of the system and finding its transfer function. The fuzzy logic controller enables the representation of human information pertaining to the system's control, manipulation, and execution. The developer of a controller must establish the rules, and the information may come from the human controller or from an understanding of the plant dynamics. The expansion in the rules leads the fuzzy controller to take efficient decisions and to be very strong for controlling the plant, besides the ability to control the nonlinearity that occurs in the plant. In this paper, the transfer function and response to a unit-step input of a closed-loop position control system were derived. The response of the system was improved by the design and simulation of a PD controller. Then, the formulation and construction of four fuzzy controllers gradually increase in the rule base 9, 25, 47, and 81. Finally, design and simulate a hybrid fuzzy controller. The system was simulated using MATLAB Simulink, examining a range of factors such as the rise, settling time, and overshoot. The implementation of a hybrid-fuzzy controller provides the benefits of the fuzzy controller and PD controller. This means that the hybrid fuzzy has a better transient response than the uncontrolled system, a system with PD controller, and a fuzzy controller.
conventional controllers, PD controller, fuzzy logic controller, hybrid fuzzy controller
Complex industrial processes are difficult to control automatically due to their nonlinearities and time-varying behavior. Examining the control strategies utilized by the process operator is another method for controlling a process. The process operators' control strategy is founded on conjecture and practical experience and can be considered a body of knowledge. In 1965, Lotfi A. Zadeh introduces the concepts of fuzzy logic and fuzzy set, which are dependent on linguistic rules; these algorithms were developed by directly evaluating the linguistic rules using digital computers. Fuzzy logic has been developed to provide soft information processing algorithms that permit variables to be partial members of a particular set and use a generalization of the conventional Boolean logical operators to manipulate this data. Today, fuzzy logic systems are used in a variety of engineering applications, medicine, meteorology, and other areas of daily life [1].
Classical PID controllers are regarded as one of the primary techniques for satisfying the needs of control systems. The process of designing PID controllers by adjusting KP, KI, and KD is known as tuning the controller parameters. The fuzzy logic controller is a non-linear method of system stability maintenance. Nevertheless, PID controllers produce a minimal steady-state error. Consequently, the hybridization of the controllers, i.e., the PID controller and the fuzzy logic controller, was devised to take advantage of the advantageous features of both controllers. Hybridization is the process of combining the performance of two distinct controllers to achieve superior performance compared to the performance of the individual controllers. A fuzzy logic controller has a quicker response time and a lower overshoot percentage. PID controller provides a low steady-state error. To design the hybrid model with the two controllers that enhance the performance of the control system [2]. Jang et al. [3] suggest adapting Hybrid PI and PD Type Fuzzy Logic controller to a quad-rotor for controlling the quadrotor’s X-axis (roll), Y-axis (pitch), and Z-axis (yaw). Hybrid PI and PD Type Fuzzy Logic Controller combines PI Fuzzy Logic Controller and PD Type Fuzzy Logic Controller and its purposes to make better performance than using single PI, PD Fuzzy Logic Controller.
Ismail et al. [4] regulate the speed of a DC Series Wound Motor with an FLC. FLC provides the best performance in terms of system response time compared to a dc motor without a controller. Hoang et al. [5] describes a method for developing a fuzzy logic controller that defines the PID parameters to improve the quality of an asynchronous three-stage wind power generator compared to conventional PID controllers. The simulation results indicate that the system's performance has been maintained in synchronous modes and when the active and reactive power is adjusted in response to load demands.
Fadaei et al. [6] proposed a hybrid fuzzy-PD controller for an inverted, wheeled pendulum. The controller is intended to stabilize the inverted pendulum, and its parameters are optimized using a genetic algorithm. The simulation results indicate that, with the force applied to the cart, the system is adequately balanced and would be stable over time. Chawpattnaik et al. [7] introduced the hybrid Fuzzy Fractional Order Proportional Derivative-Fractional Order Proportional Integral controller. The controller is proposed to address AGC issues in multiple interconnected areas of the electrical power system. Zerikat and Chekroun [8] proposed a tracking application control system. By adjusting the external force, the proposed control system displays a rapid response. Salim et al. [9] examined FLC for a buck converter. The simulation results indicate that FPD plus Integral is a suitable controller when the steady-state error must be minimized and that a two-level fuzzy hybrid is the optimal control method when the settling time must be kept to a minimum. Chaudhary et al. [10] compare the performance of PI controller-based DVR, fuzzy controller-based DVR, and PI-fuzzy controller-based DVR in a compensated feeder. Brehm and Rattan [11] presented a hybrid fuzzy PID controller that takes advantage of the properties of the fuzzy PI and PD controllers. Samad et al. [12] proposed a fuzzy logic controller tuned for both a Linear Quadratic Regulator (LQR) and a proportional derivative (PD) controller, which is applied in stabilizing a multi-link robotic system. Paramasivam and Arumugam [13] show that a hybrid controller for switched reluctance motor (SRM) drive has fast tracking capability, less steady-state error, and is robust to load disturbance. Shouran et al. [14] develop and implements a design of the Fuzzy Proportional Integral Derivative with filtered derivative mode (Fuzzy PIDF) for Load Frequency Control (LFC) of a two-area interconnected power system. The Bees Algorithm (BA) and other optimization tools are used to accomplish this task, he simulation results indicate that the contribution of the BA tuned the proposed fuzzy control structures in alleviating the overshoot, undershoot, and the settling time of the frequency in both areas and the tie-line power oscillations. Humaidi et al. [15] present a control design based on an Interval Type-2 Fuzzy Logic (IT2FL) for the trajectory tracking of a 3-RRR (3-Revolute-Revolute-Revolute) planar parallel robot. Abed et al. [16] presented two fuzzy logic (FL) schemes for speed-controlled brushless DC motors. The first controller is a Type 1 FL controller (T1FLC), whereas the second controller is an interval Type 2 FL controller (IT2FLC). The two proposed controllers were compared in terms of system dynamics and performance. Ghanim et al. [17] propose a Fuzzy Logic Controller (FLC) for temperature control, the controller combines the advantages of controller structure and fuzzy inference for air heater temperature control applications. Chintu et al. [18] present a study on an adaptive differential evolution tuned hybrid Fuzzy Proportional Derivative-Proportional Integral structure suggested for automatic generation control (AGC) of power systems. Nguyen and Nguyen [19] this paper introduce the Fuzzy-PI integrated control algorithm to control the system’s efficiency. The Fuzzy algorithm adjusts the KP and KI parameters of the controller. This response depends on the oscillation state of the vehicle. As a result, the vehicle’s stability and comfort are greatly enhanced when the integrated controller is used. Besides, the change of KP and KI parameters is also completely suitable for the vehicle’s driving conditions. In this work [20], the model is obtained for a hybrid intelligent controller for improving the stability of the pressure process station. Performance analysis is done for PID, Fuzzy PID, and Hybrid fuzzy PID controller. The hybrid controller gives reduced settling time better than other controllers. Noaman and Mohammad [21] propose an adaptive Hybrid Neural Fuzzy Controller using the augmented Error Method.
In this paper, the response of a control system was tested through different types of controllers such as PD controller, a fuzzy controller with a different rule base, and a hybrid fuzzy controller.
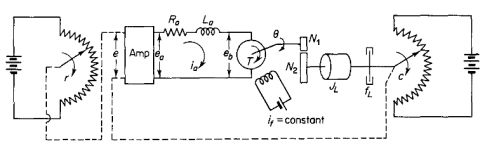
This paper derives the transfer function and response to a unit-step input of a closed-loop position controller. Describe the design and simulate various types of controllers using Simulink (PD and Hybrid fuzzy controllers). Figure 1 depicts the schematic block of the position controller.
Figure 1. Block diagram schematic of the position controller
The simplified block diagram of this system is depicted in Figure 2 [22].
Figure 2. Simplified block diagram
The closed-loop response for the position control system due to unit step input is shown in Figure 3 with an acceptable response.
Figure 3. Closed-loop step response for the position control system
3.1 PD controller
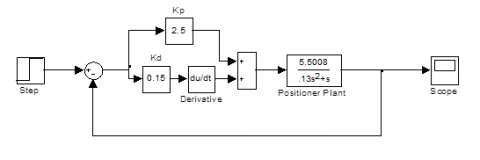
This section describes the design and simulation of the PD controller. PD controller will be implemented in light of the fact that PI or PID controllers will not be implemented because there is no steady-state error. The block diagram of the PD controller is depicted in Figure 4. The following formula describes the PD controller:
$u(t)=K_p \times e(t)+K_d \times \Delta e(t)$ (1)
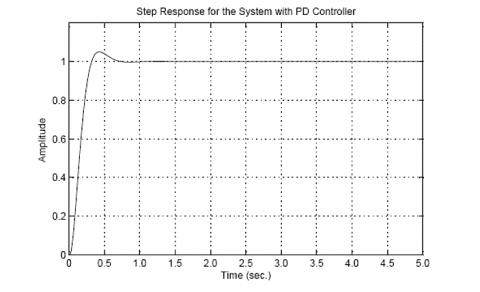
It is preferred to ascertain the controller gains Kp and Kd that provide the desired response for our PD controller; therefore, through trial and error, it was determined that Kp = 2.5 and Kd = 0.15. Figure 5 depicts the unit step response of the PD controller. Applying the PD controller improved the system performance through less rise time from 0.283 sec to 0.26 sec, less settling time from 0.911 sec to 0.58 sec, and the overshoot reduced to 5.3% from 9.9%. As shown in Figure 3 the system has an acceptable response and overshoot. To investigate the response of the system due to different controller types. First, we apply a PD controller to improve its response and as a result, the overshoot was reduced according to the Kp and Kd gains selected.
Figure 4. Block diagram for the position PD controller
Figure 5. Step response for PD-controlled position system
3.2 PD fuzzy controller
This section introduces the formulation and construction of four FCs for gradually increasing the number of rules. These are the rule bases:
The same inputs were chosen for all of them which are:
(Position Error) ER = c – r
(Error Change) ERC = (ER2 – ER1) / $\Delta \mathrm{t}$
where c is the angular displacement of the output shaft, r is the angular displacement of the reference input shaft, ER1 and ER2 are the position control system's errors at t1 and t2, and t = (t2 - t1).
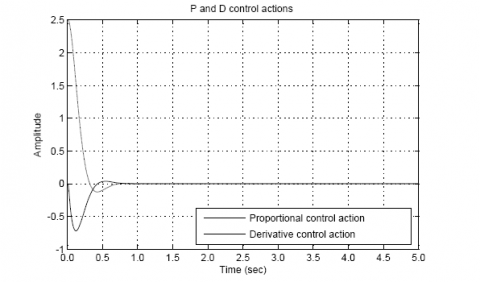
As shown in Figure 6, all the rules were derived from the control action of the proportional and derivative signals. In addition, the scaling factors (G1, G2, and G3) were adjusted through iterative trial and error, and the optimal response was obtained by varying the parameters and increasing the number of rules.
Figure 6. Proportional and derivative control actions
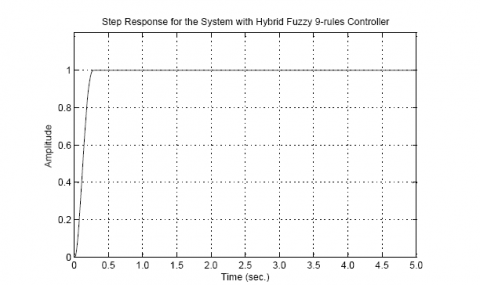
3.2.1 Controller with a 9-rule foundation fuzzy
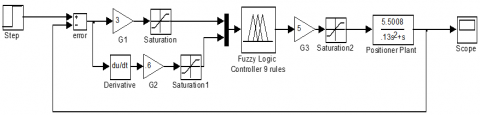
As depicted in Figure 7, three triangular MFs of each input and output (I/P and O/P) are utilized and uniformly distributed across their universes of discourse. The range [-1 1] constitutes the effective universe of discourse. Negative (N), zero (ZE), and positive (P) are the linguistic values for these MFs for I/P and O/P, respectively. Table 1 displays the PD fuzzy controller's nine-rule base table. Figure 8 depicts the block diagram for the 9-Rule FC, with the tuned gains (scaling factors) G1 = 3, G2 = 0.6, and G3 = 5. Figure 9 depicts this controller's step response.
Figure 7. Input /output membership functions mapping of the 9-rules FC
Table 1. Fuzzy controller rule matrix (9-rules)
|
|
ER |
|||
|
N |
ZE |
P |
||
|
ERC |
N |
N |
N |
Z |
|
ZE |
N |
Z |
P |
|
|
P |
Z |
P |
P |
|
Figure 8. The position controller with 9–rules FC
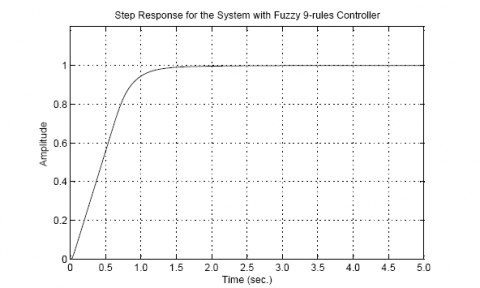
Figure 9. The step response for a system with a 9-rule FC
3.2.2 Controller with a 25-rule foundation fuzzy
As depicted in Figure 10, five triangular MFs are used for each I/P and O/P and are uniformly distributed across their discourse universes.
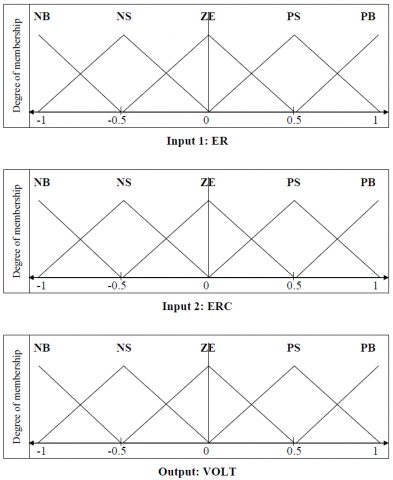
Figure 10. Input/output membership functions mapping of the 25-rules FC
The range [-1 1] constitutes the effective universe of discourse. Negative-Big (NB), Negative-Small (NS), Zero (ZE), Positive-Small (PS), and Positive-Big (PB) are the linguistic values (for I/P and O/P) for these MFs. Table 2 displays the rule table for the 25-rules controller.
Figure 11 depicts the block diagram for the 25-Rule FC. The tuned gains (scaling factors), where G1 = 3, G2 = 0.5, and G3 = 2, whereas G1 = 3, G2 = 0.5, and G3 = 2. Figure 12 depicts the controller's unit step response.
Table 2. Fuzzy controller rule matrix (25-rules)
|
|
ER |
|||||
|
NB |
NM |
Z |
PM |
PB |
||
|
ERC |
NB |
NB |
NB |
NM |
NM |
Z |
|
NM |
NB |
NM |
NM |
Z |
PM |
|
|
Z |
NM |
NM |
Z |
PM |
PM |
|
|
PM |
NM |
Z |
PM |
PM |
PB |
|
|
PB |
Z |
PM |
PM |
PB |
PB |
|
Figure 11. The block diagram for the position control system with 25-rules
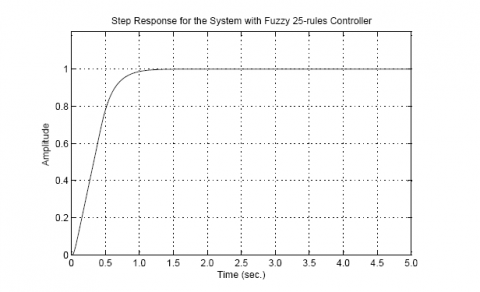
Figure 12. The step response for a system with a 25-rule FC
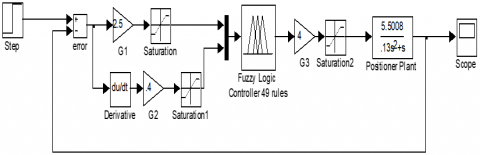
3.2.3 The 49-rule fuzzy controller
As depicted in Figure 13, seven triangular MFs of each I/P and O/P are utilized and uniformly distributed across their universes of discourse.
Figure 13. Input/output membership functions mapping of the 49–rules FC
Table 3. Fuzzy controller rule matrix (49-rules)
|
|
ER |
|||||||
|
NB |
NM |
NS |
Z |
PS |
PM |
PB |
||
|
ERC |
NB |
NB |
NB |
NM |
NM |
NS |
NS |
Z |
|
NM |
NB |
NM |
NM |
NS |
NS |
Z |
PS |
|
|
NS |
NM |
NM |
NS |
NS |
Z |
PS |
PS |
|
|
Z |
NM |
NS |
NS |
Z |
PS |
PS |
PM |
|
|
PS |
NS |
NS |
Z |
PS |
PS |
PM |
PM |
|
|
PM |
NS |
Z |
PS |
PS |
PM |
PM |
PB |
|
|
PB |
Z |
PS |
PS |
PM |
PM |
PB |
PB |
|
Figure 14. The block diagram for the position control system with 49–rules FC
Figure 15. The step response for the system with a 49-rule FC
The range [-1 1] constitutes the effective universe of discourse. For I/P and O/P, these MFs have the following linguistic values: Negative Pig (NB), Negative Medium (NM), Negative Small (NS), Zero (ZE), Positive Small (PS), Positive Medium (PM), and Positive Big (PB). Table 3 displays the 49-rules table controller.
Figure 14 depicts the block diagram for the 49-Rule FC. While G1=2.5, G2=0.4, and G3=4, the tuned gains (scaling factors) are: G2=0.4, G3=4. Figure 15 depicts this controller's step response.
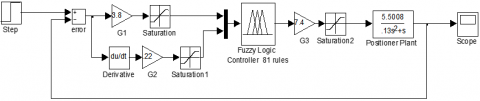
3.2.4 The 81-rule fuzzy controller
As given in Figure 16, nine triangular MFs of each I/P and O/P are utilized and uniformly distributed across their universes of discourse.
The range [-1, 1] constitutes the effective universe of discourse. The following linguistic values are applicable to these membership functions: (for I/P and O/P) Negative Pig (NB), Negative Medium (NM), Negative Small (NS), Negative (N), Zero (ZE), Positive (P), Positive Small (PS), Positive Medium (PM), and Positive Big (PB). Table 4 displays the rule table for the 81-rules controller.
Figure 16. Input/output membership functions mapping of the 81–rules FC
Table 4. Fuzzy controller rule matrix (81-rules)
|
|
ER |
|||||||||
|
NB |
NM |
NS |
N |
Z |
P |
PS |
PM |
PB |
||
|
ERC |
NB |
NB |
NB |
NM |
NM |
NS |
NS |
N |
N |
Z |
|
NM |
NB |
NM |
NM |
NS |
NS |
N |
N |
Z |
P |
|
|
NS |
NM |
NM |
NS |
NS |
N |
N |
Z |
P |
P |
|
|
N |
NM |
NS |
NS |
N |
N |
Z |
P |
P |
PS |
|
|
Z |
NS |
NS |
N |
N |
Z |
P |
P |
PS |
PS |
|
|
P |
NS |
N |
N |
Z |
P |
P |
PS |
PS |
PM |
|
|
PS |
N |
N |
Z |
P |
P |
PS |
PS |
PM |
PM |
|
|
PM |
N |
Z |
P |
P |
PS |
PS |
PM |
PM |
PB |
|
|
PB |
Z |
P |
P |
PS |
PS |
PM |
PM |
PB |
PB |
|
Figure 17. The block diagram for the position control system with 81–rules
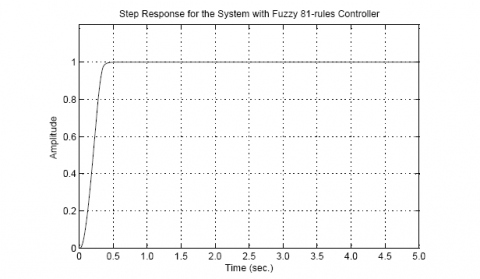
Figure 18. The step response for the system with an 81-rule FC
Figure 17 depicts the block diagram for the 81-Rule FC. While G1=3.8, G2=0.22, and G3=7.4, the tuned gains (scaling factors) are: G2=0.22, G3=7.4. Figure 18 represents this controller's step response.
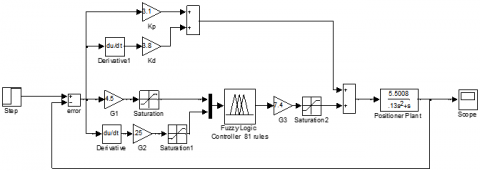
3.3 Hybrid fuzzy controller
To make use of the advantage of the PD controller and FC and eliminate their disadvantages, this can be done by using a hybrid fuzzy controller which combines both two controllers.
In this work, the PD controller and FC are combined so that the control variable (UHY) in this controller is:
$U_{H Y}=\left\{\begin{array}{lr}U_{P D} & \text { if }|E R|>e_{l i m} \text { or }|E R C|>e_{l i m} \\ U_{P D}+U_F & \text { otherwise }\end{array}\right.$ (2)
where, UPD represents the output of the PD controller, UF represents the output of the FC, and elim represents the input domain of the FC. Eq. (2) indicates that if the angle error or the change in angle error is outside the input domain of FC, then no fuzzy controller rules will be activated, and the only control variable will come from the PD controller. Figure 19 depicts the block diagram of the hybrid fuzzy controller. Kp = 3.1 and Kd = 3.8 are the parameters of the PD controller, and G1 = 4.5, G2 = 0.25, and G3 = 7.4 are the scaling factors for FC with nine MFs (81 rules). Figure 20 depicts the resulting optimized unit step response.
Figure 19. Block diagram for the position control system with hybrid fuzzy controller
Figure 20. Step response for the system with hybrid fuzzy controller
Comparing the transient response specifications of the position control system with and without controllers is demonstrated. Figure 3 depicts the system response due to the unit step response of the uncontrolled position control system, so the transient response specifications are as follows:
It has also been observed that there is no problem with the system's steady-state response since ess is zero. Therefore, this PD controller is preferable to PI or PID controllers.
Figure 5 depicts the step response for the system with a PD controller; the transient response specifications are as follows:
This demonstrates that the PD controller has accelerated the system by reducing overshoot and settling time. In spite of this, the steady-state response retains its characteristics of having no ess, vibrations, or noise.
The step response for the system with PD-like Fuzzy Controllers (a: 9–rule, b: 25–rule, c: 49–rule, d: 81–rule) is shown in Figure 21, it shows how the increment of the rules matrix will affect the response of the system as follows:
As with PD and PD-like Fuzzy Controller, the steady-state response is excellent (no ess, no vibrations, no noise).
Lastly, Figure 22 depicts the step response of the position control system equipped with a hybrid fuzzy controller, indicating:
The steady-state response is excellent, we discover no oscillation no noise, or any problems. The hybrid fuzzy controller has achieved the optimum desired response.
Figure 21. Step responses for the fuzzy controlled position control system (all)
Table 5 and Figure 23 show a comparison between the different types of controllers used. It has been seen that transient response specifications (rise time, settling time, and overshoot) for the uncontrolled position control system are larger values compared with these parameters and are reduced when the PD controller is applied. While using a PD fuzzy controller gives better performance with zero overshoot when the rules gradually increase from 9, 25, 49, and 81. The best performance is obtained when a hybrid fuzzy controller with 81 rules was applied.
Figure 21 shows the system response of PD fuzzy controller will be faster with zero overshoot as increases the controller rule base increased gradually 9, 25, 49, and 81.
Figure 22. Step response for the hybrid fuzzy (81-rules) controller system
Table 5. Comparison of the controller's transient response specifications results
|
Controller |
Rise Time, t (Sec) at 90% |
Settling Time T, (Sec) at 2% |
Overshoot |
Rating |
|
Uncontrolled System |
0.283 |
0.911 |
9.96% |
Very Poor |
|
PD |
0.26 |
0.58 |
5.3 % |
Good |
|
Fuzzy 9 Rules |
0.86 |
1.25 |
0 % |
Poor |
|
Fuzzy 25 Rules |
0.64 |
0.93 |
0 % |
Acceptable |
|
Fuzzy 49 Rules |
0.55 |
0.82 |
0 % |
Acceptable |
|
Fuzzy 81 Rules |
0.31 |
0.36 |
0 % |
Very Good |
|
Hybrid Fuzzy 81 Rules |
0.2 |
0.24 |
0 % |
Excellent |
Figure 23. Unit step responses for all controller types
The following conclusions can be drawn based on the findings:
After constructing a mathematical model of the system and determining its transfer function, the conventional controller (PI, PD, and PID) can be used to control any linear control system.
Fuzzy logic controllers provide the capacity to represent, manipulate, and implement human knowledge regarding system control. The rules for a controller must be established by the designer, and the information could come from the human decision-maker performing the control task or from an understanding of the plant dynamics. In addition to being able to control the nonlinearity that occurs in the plant, the expansion of the rules causes the fuzzy controller to make effective decisions and be very effective at controlling the system.
The implementation of a hybrid fuzzy controller provides the advantages of the fuzzy controller and other conventional controllers while eliminating their disadvantages. This indicates that the hybrid fuzzy controller possesses both the speed characteristic of the conventional controller and the good transient response characteristic of the fuzzy controller.
This study can be extended for future work by conducting a comparison study between the proposed FL controller with other control techniques in the literature [23-30].
|
FLC |
Fuzzy Logic Controller |
|
FPD |
Fuzzy Proportional Controller |
|
KD |
Derivative Constant |
|
KI |
Integral Constant |
|
KP |
Proportional Constant |
|
MF |
Membership Function |
|
PD |
Proportional Derivative |
|
PI |
Proportional Integral |
|
PID |
Proportional Integral Derivative |
[1] Reznik. L. (1997). Fuzzy Controllers. Newnes. https://doi.org/10.1016/B978-0-7506-3429-8.X5002-7
[2] Hussein, K.F., Abdel-Qader, I., Hussain, M.K. (2015). Hybrid fuzzy PID controller for buck-boost converter in solar energy-battery systems. In 2015 IEEE International Conference on Electro/Information Technology (EIT), pp. 70-75. https://doi.org/10.1109/EIT.2015.7293323
[3] Jang, S., Lee, S.W., Jeong, J. (2016). A hybrid PI and PD type fuzzy logic controller for quadrotor. Asia-Pacific Proceeding of Applied Science and Engineering for Better Human Life, 10: 147-151. https://doi.org/10.21742/ASEHL.2016.10.34
[4] Ismail, N.L., Zakaria, K.A., Nazar, N.M., Syaripuddin, M., Mokhtar, A.S.N., Thanakodi, S. (2018). DC motor speed control using fuzzy logic controller. In AIP Conference Proceedings, 1930(1): 020026. https://doi.org/10.1063/1.5022920
[5] Hoang, D.D., Minh, T.X., Dung, T.X. (2018). Design the fuzzy controller tuning PID controller parameter for wind generator system. SSRG International Journal of Electrical and Electronics Engineering (SSRG-IJEEE), 5(4): 9-15. https://doi.org/10.14445/23488379/IJEEE-V5I4P102
[6] Fadaei, M.H.K., Pahnehkolaei, S.A.H., Jafari, M. (2020). Design of hybrid fuzzy-PD controller for an inverted pendulum. Majlesi Journal of Mechatronic Systems, 10(2): 1-6. https://doi.org/10.13140/RG.2.2.21248.25606
[7] Chawpattnaik, A., Sahu, R.K., Pradhan, P.C. (2020). Design and analysis of hybrid fuzzy fractional order PD-PI controller for frequency regulation problem. In 2020 International Conference on Computational Intelligence for Smart Power System and Sustainable Energy (CISPSSE), pp. 1-6. https://doi.org/10.1109/CISPSSE49931.2020.9212194
[8] Zerikat, M., Chekroun, S. (2007). Design and implementation of a hybrid fuzzy controller for a high-performance induction. International Journal of Computer and Information Engineering, 1(2): 202-208. https://doi.org/10.5281/zenodo.1333794
[9] Salim, H., Husnaini, I., Asnil, A. (2019). Fuzzy logic based controller for buck converter. MOTIVATION: Journal of Mechanical, Electrical, and Industrial Engineering, 1(3): 1-12. https://doi.org/10.46574/motivection.v1i3.13
[10] Chaudhary, D., Ahmed, A., Mangal, A. (2015). Comparative analysis of the PI, fuzzy, and hybrid PI-fuzzy controllers based DVR. International Journal of Emerging Technology and Advanced Engineering, 5(1): 149-160.
[11] Brehm, T., Rattan, K.S. (1994). Hybrid fuzzy logic PID controller. In Proceedings of 1994 IEEE 3rd International Fuzzy Systems Conference, pp. 1682-1687. https://doi.org/10.1109/FUZZY.1994.343602
[12] Samad, B.A., Mohamed, M., Anavi, F., Melikhov, Y. (2022). A hybrid fuzzy approach of different controllers to stabilize a 3-link swinging robotic (Robogymnast). In 2022 2nd International Conference on Advance Computing and Innovative Technologies in Engineering (ICACITE), Greater Noida, India, pp. 2432-2437. https://doi.org/10.1109/ICACITE53722.2022.9823768
[13] Paramasivam, S., Arumugam R. (2005). Hybrid fuzzy controller for speed control of switched reluctance motor drives, Energy Conversion and Management, 46(9-10): 1365-1378. https://doi.org/10.1016/j.enconman.2004.08.007
[14] Shouran, M., Anayi, F., Packianather, M., Habil, M. (2022). Different fuzzy control configurations tuned by the bees algorithm for LFC of two-area power system. Energies, 15(2): 657. https://doi.org/10.3390/en15020657
[15] Humaidi, A.J., Najem, H.T., Al-Dujaili, A.Q., Pereira, D.A., Ibraheem, K.I., Azar, A.T. (2021). Social spider optimization algorithm for tuning parameters in PD-like Interval Type-2 fuzzy logic controller applied to a parallel robot. Measurement and Control, 54(3-4): 303-323. https://doi.org/10.1177/0020294021997483
[16] Abed, Y., Humod, A.T., Humaidi, A.J. (2020). Type 1 versus type 2 fuzzy logic speed controllers for brushless dc motors. International Journal of Electrical and Computer Engineering, 10(1): 265-274. https://doi.org/10.11591/ijece.v10i1.pp265-274
[17] Ghanim, T., Ajel, A.R., Humaidi, A.J. (2020). Optimal fuzzy logic control for temperature control based on social spider optimization. In IOP Conference Series: Materials Science and Engineering, 745(1): 012099. https://doi.org/10.1088/1757-899X/745/1/012099
[18] Chintu, J.M.R., Sahu, R.K., Panda, S. (2022) Adaptive differential evolution tuned hybrid fuzzy PD-PI controller for automatic generation control of power systems. International Journal of Ambient Energy, 43(1): 515-530. https://doi.org/10.1080/01430750.2019.1653986
[19] Nguyen, D.N., Nguyen, T.A. (2022). A hybrid control algorithm fuzzy-PI with the second derivative of the error signal for an active suspension system. Mathematical Problems in Engineering, 2022: 3525609. https://doi.org/10.1155/2022/3525609
[20] Anitha, T., Gopu, G., Nagarajapandian, M, Devan, P.A.M. (2019). Hybrid fuzzy PID controller for pressure process control application. In 2019 IEEE Student Conference on Research and Development (SCOReD), Bandar Seri Iskandar, Malaysia, pp. 129-133. https://doi.org/10.1109/SCORED.2019.8896276
[21] Noaman, N.M., Mohammad, O.A. (2006). Adaptive hybrid neural fuzzy controller using augmented error method. In 3rd IEEE GCC Conference, Manama, Bahrain. https://doi.org/10.1109/ieeegcc.2006.5686250
[22] Ogata, K. (2010). Modern Control Engineering. Prentice–Hall Inc., 5th edition.
[23] Humaidi, A.J., Badr, H.M., Ajil, A.R. (2018). Design of active disturbance rejection control for a single-link flexible joint robot manipulator. In 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, pp. 452-457. https://doi.org/10.1109/ICSTCC.2018.8540652
[24] Humaidi, A.J., Hameed, M.R., Hameed, A.H. (2018). Design of block-backstepping controller to ball and arc system based on zero dynamic theory. Journal of Engineering Science and Technology, 13(7): 2084-2105.
[25] Humaidi, A.J., Hameed, A.H. (2019). Design and comparative study of advanced adaptive control schemes for position control of electronic throttle valve. Information, 10(2): 65. https://doi.org/10.3390/info10020065
[26] Humaidi, A.J., Hameed, A.H., Hameed, M.R. (2017). Robust adaptive speed control for DC motor using novel weighted E-modified MRAC. In 2017 IEEE International Conference on Power, Control, Signals and Instrumentation Engineering (ICPCSI), Chennai, India, pp. 313-319. https://doi.org/10.1109/ICPCSI.2017.8392302
[27] Noaman, M.N., Abbas, K.A., Kasim, R.M. (2007). Modeling and simulation of 6-DOF grasping myoelectric artificial hand mode (AHM) based on anatomical model of phalanx-model. In 9th European Conference for the Advancement of Assistive Technology in Europe (AAATE), San Sebastian, Spain, pp. 548-552.
[28] Humaidi, A.J., Badr, H.M. (2018). Linear and nonlinear active disturbance rejection controllers for single-link flexible joint robot manipulator based on PSO tuner. Journal of Engineering Science & Technology Review, 11(3): 133-138. https://doi.org/10.25103/jestr.113.18
[29] Noaman, M.N., Abbas, K.A., Jabbar, R.B.A. (2007). Design and implementation of haptic based artificial hand mode (AHM) based on virtual reality interface of DHM system. In 9th European Conference for the Advancement of Assistive Technology in Europe (AAATE), San Sebastian, Spain, pp 543-547.
[30] Jaleel, A.H., Talaat, E.N., Hameed, M.R., Hameed, A.H. (2019). Design of adaptive observer-based backstepping control of cart-pole pendulum system. In 2019 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, pp. 1-5. https://doi.org/10.1109/ICECCT.2019.8869179