Anumolu Lasmika* | Mathivanan Kumaresan
© 2022 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The use of vehicles is increasing every day because of the growing industrialization. Hence, parking the vehicles in the metropolitan cities could create the traffic congestion, which is one of the major problem need to be resolved in the smart city systems. For this purpose, this research work intends to develop a smart car parking system with proper controlling and monitoring units. The main motive of this work was to avoid the traffic congestion by developing an advanced car parking system with the help of Internet of Things (IoT) technology. Also, an image processing technique is utilized in this framework for identifying whether the car is present or not in the parking area. In which, an Anisotropic Diffusion Gaussian Filtering (ADGF) technique is utilized to preprocess the given image for improving the quality and reducing the noise effects. After that, the Grey Level Co-occurrence Matrix (GLCM) is employed to extract the contrast, correlation, energy and homogeneity features. After that, the suitable number of features are optimally selected by using the Grey Wolf Optimization (GWO) technique, which efficiently improves the speed of operation. Finally, the Probability Correlated Neural Network (PCNN) technique deployed for accurately recognizing that whether the car is present or not. For validation, the performance of this scheme is evaluated and compared by using various measures.
smart car parking system, Internet of Things (IoT), recognition and classification, Anisotropic Diffusion Gaussian Filtering, Grey Level-Co-Occurrence Matrix, Probability Correlated Neural Network (PCNN)
In the recent days, the Internet of Things (IoT) [1, 2] technology has gained a significant attention in different types of application systems, due to its benefits of high system efficiency, cost-effective nature, and better opportunities. Also, the utilization rate of mobiles, wireless sensors, and embedded system are rapidly increased with the use of the IoT [3-6]. The smart car parking system is one of the interesting and demanding research field in smart city systems [7, 8]. The main purpose of developing the smart car parking system is to avoid the traffic congestions and time delay of processing and waiting. Typically, the smart car parking system [9] has the following benefits:
1. It exactly predicts and sense the occupancy space of vehicles for avoiding congestion.
2. It optimally utilizes the parking space of all vehicles.
3. Due to the incorporation of IoT technology, it efficiently avoids traffic in the city.
4. By using the soft computing methodologies, intelligent decisions are taken at the complex situations.
5. Moreover, the smart car parking system could efficiently create the urban environment with reduced Co2 emission and other pollutants.
Due to this facts, various car parking architectures have been developed in the conventional works [10-12], which utilizes some machine learning or deep learning models for improving the performance of recognition. In the proposed work, the image processing techniques are employed for accurately recognizing the car image with desired parking location [13, 14]. The major contributions of this research work are as follows:
· To develop an advanced car parking system for reducing the traffic congestion with the help of IoT technology.
· To accurately recognize the parking area, the image preprocessing system is incorporated, which helps to predict whether the parking area is available or not.
· To efficiently preprocess the given image, an Anisotropic Diffusion Gaussian Filtering (ADGF) technique is employed that eliminates the noisy content with increased quality.
· To extract the set of features from the normalized image, the Grey Level Co-occurrence Matrix (GLCM) technique is utilized.
· To optimally select the best features based on the optimal fitness function, the Grey Wolf Optimization (GWO) technique is employed.
· To improve the recognition performance, the Probability Correlated Neural Network (PCNN) technique is deployed.
The remaining portions of this paper are segregated into the following sections: the existing works related to the car parking system in IoT-cloud environment are surveyed with its advantages and disadvantages in Section II. Then, the description of the overall proposed methodology with its appropriate algorithmic illustrations are presented in Section III. Moreover, the overall performance results and comparative analysis of the existing and proposed security models are illustrated in Section IV. Finally, the entire paper is summarized with its advantages and future scope in Section V.
Alsafery et al. [3] developed a smart car parking system with the use of IoT technology for noticing the existence of vehicles in the parking area. Here, the data from sensors could be efficiently managed by constructing the middle ware architecture. Moreover, this work intends to reduce the traffic congestion by identifying the nearest free spaces for car parking. In which, the data preprocessing and fusion methodologies have been applied for producing the accurate information to the users. The key benefits of this work were better recognition rate, reduced time consumption, and optimal performance rate. However, it facing the major problems of inefficient computing operations, high misclassification rate, and error outputs. Mudaliar et al. [15] constructed an IoT based car parking system for avoiding the traffic congestion by using the multilayer parking methodology. From this paper, the key components used for designing the smart car parking system have been studied. Ali et al. [5] suggested a deep Long Short Term Memory (LSTM) based smart car parking system for avoiding the traffic congestion problems in the city area. In this framework, the car parking information have been collected through various sensors deployed at the car parking locations. In order to aggregate the sensor information, the deep learning model [16] has been utilized that predicts the availability of free parking space based on the request. Yet, this work limits with problems of increased error rate and high computational complexity in prediction, which degrades the performance of entire system.
Luque-Vega et al. [17] introduced an intelligent smart parking system for analyzing the availability of free spaces through the mobile app. For this purpose, the Smart Vehicular Presence Sensor (SPIN-V) has been utilized in this work, which helps to monitor and control the process. Thangam et al. [18] designed a smart parking reservation system with the use of IoT technology, where the Raspberry-pi was utilized to construct the environment. Here, the face recognition was performed to identify the driver’s face for ensuring the security. Lookmuang et al. [19] established a smart car parking system for suggesting the free space to the driver for parking the vehicle. This work [20] mainly objects to reduce the traffic congestion problem by optimally allocating the free space for car parking with the help of IoT technology. Also, it aims to enhance the parking system with reduced time and increased speed of processing. Farag et al. [21] employed a parking entrance controlling mechanism for developing the car plate recognition system. This framework includes the processes of preprocessing, feature extraction, and recognition. Here, the color filtering was utilized to increase the quality of image with reduced noise contents. Then, the Discrete Wavelet Transformation (DWT) [22] technique was used to extract the set of features from the normalized image, where the segmented characters were accurately recognition by using the correlation method. In addition to that, the Support Vector Machine (SVM) classification model was deployed to exactly recognize the image based on the correlation value.
Ke et al. [23] introduced an intelligent parking surveillance system with the AI methodology for ensuring the security. In this framework, the computational load was segregated by the AI technology for IoT local devices, which helps to increase the optimal performance of targeting area. Moreover, an enhanced pipeline model was also utilized to efficiently handle the lighting and occlusion conditions. Yet, the performance of this system was not up to the mark, which was the major limitation of this work. Zantails et al. [24] presented a comprehensive review on various machine learning methodologies used for improving the performance of smart transportation systems. The main contribution of this work was to incorporate the benefits of both machine learning and IoT technology for developing an efficient smart parking system. Here, the different types of machine learning models under the categories of supervised learning, unsupervised learning, and semi-supervised learning have been discussed with its key features. For instance, it includes Deep CNN, Deep Belief Networks (DBN), Hidden Markov Model (HMM), Fuzzy C-Means (FCM), Feed Forward Neural Networks (FFNN), Logistic Regression (LR), and Markov Decision Process (MDP). Based on this study, it was analyzed that the deep learning technique outperforms the other models with increased accuracy and performance rate. Cui et al. [25] conducted a comprehensive review on various machine learning methodologies used for improving the performance of IoT systems. It includes the types of k-Nearest Neighbor (KNN), the Support Vector Machine (SVM), Gaussian Mixture Model (GMM), Decision Tree (DT), Ensemble Learning (EL), and Random Forest (RF) classification techniques, which were mainly used for improving the process of recognition system.
Table 1. Comparative analysis between existing and proposed classification techniques
|
Methods |
Advantages |
Disadvantages |
|
Region based Convolutional Neural Network (RCNN) |
|
|
|
Ensemble based classification |
|
|
|
Contrastive feature extraction network |
|
|
|
Deep convolutional neural network |
|
|
|
Wavelet Neural Network (WNN) |
|
|
Acharya et al. [26] suggested an image based car parking recognition system by using the deep learning models. This work intends to investigate the performance of various deep learning models used for recognizing the car image based on the set of features of input image. Also, a traffic learning approach [27] was utilized in this work for detecting the available parking space in the desired location, where the visual features have been utilized to improve the effectiveness and accuracy of recognition. However, it followed some complex computations for increasing the speed of operations, which degrades the efficiency of recognition system. Saeliw et al. [28] developed a mobile application based smart car parking system incorporated with IoT technologies. Here, the Radio Frequency Identification (RFID) technique was utilized to improve the efficiency of car parking management. Meduri and Tellus [29] suggested a Haar cascade classifier for designing the smart parking system. Here, the Haar like features have been utilized to improve the object detection performance. This work has the benefits of high recognition rate, increased classification performance, and reduced traffic congestion. Moreover, some of the recent classification techniques used for improving the recognition of car parking system are examined with its advantages and disadvantages as shown in Table 1.
According to this review, it is studied that the existing works utilized various machine learning and deep learning based classification methodologies for developing the car parking system in order to reduce the traffic congestion [30]. However, it limits with the problems of high misclassification rate, increased delay in process, and complexity in algorithm design. In order to solve these issues, this research work intends to develop a new car parking system by integrating the framework with the IoT technology, where an improved optimization based machine learning technique is utilized for accurate recognition of car images [31].
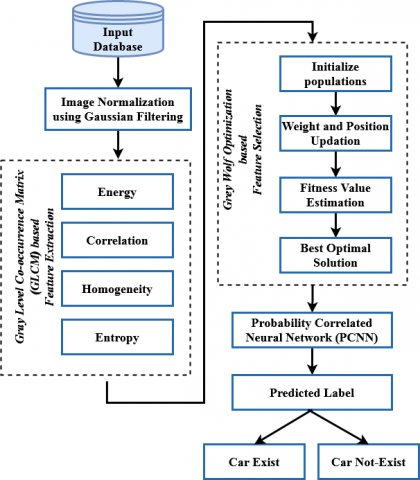
This section presents the detailed description of the proposed methodology with its overall architecture and algorithmic illustrations. The main contribution of this paper is to develop an efficient car parking system incorporated with the IoT technology for optimally allocating parking area. Here, the car image identification is performed for accurately recognizing the car located in the specified area by using the optimization based machine learning model. Also, an IoT based monitoring and controlling unit is utilized in this framework for reducing the waiting time, delay of process, and response time. In the car parking scenario, a group of users are required to spend their time for parking the cars in the desired locations. The proposed model objects to reduce the queuing time with the use of car parking management scheme. The overall architecture representation of the proposed model is shown in Figure 1, where IoT cloud server is deployed for notifying the information of cars to the users. When the user parks the car, the request has been automatically generated and passed to IoT server unit. Then, the controlling unit instructs the camera to capture the corresponding car image for monitoring the desired parking location of user. This type of monitoring system helps the user to easily find their vehicle in the parking place with reduced queuing time and delay time. Furthermore, the optimization based machine learning methodology is used for recognizing that whether the destination parking area is available or not. The overall flow of the car image processing system is shown in Figure 2, which includes the following stages:
Figure 1. Architecture model of the proposed system
Figure 2. Flow of the proposed system
3.1 Image preprocessing
Generally, image normalization is one of the essential process for the recognition system, because the accuracy of classification is highly depends on the quality of image. Hence, the input image must be preprocessed for eliminating the noise contents, reducing the blurring effects, and increasing the contrast or quality of image. Here, the Anisotropic Diffusion Gaussian Filtering (ADGF) technique is utilized to preprocess the input car image by increasing its contrast and quality of image. Typically, the anisotropic diffusion filters are mainly used for reducing the noise with better edge preservation. Also, it helps to strengthen the edges by solving the scale space problem based on diffusion. Thus, the proposed work intends to use an enhanced ADGF technique for enhancing the overall quality of input image. Here, the diffusion coefficient $\mathrm{d}_{\mathrm{c}}$ is selected for sharping the boundaries with inter-region smoothing. For the input car image $\mathrm{I}_{\mathrm{c}}$, the anisotropic diffusion is computed as follows:
$\mathrm{I}_{\mathrm{cx}}=\operatorname{div}\left(\mathrm{d}_{\mathrm{c}}(\mathrm{a}, \mathrm{b}, \mathrm{x}) \nabla \mathrm{I}_{\mathrm{c}}\right)=\mathrm{d}_{\mathrm{c}}(\mathrm{a}, \mathrm{b}, \mathrm{x}) \Delta \mathrm{I}_{\mathrm{c}}+\nabla \mathrm{d}_{\mathrm{c}} \cdot \nabla \mathrm{I}_{\mathrm{cx}}$ (1)
where, $d_c(a, b, x)$ indicates the conduction coefficient, div denotes the divergence operator, $\Delta$ is the gradient operator and $\nabla$ represents the Laplacian operator. In which, the conduction coefficient is computed for properly computing the edges of image as represented in below:
$\mathrm{d}_{\mathrm{c}}(\mathrm{a}, \mathrm{b}, \mathrm{x})=\mathrm{s}\left(\left\|\nabla \mathrm{I}_{\mathrm{c}}(\mathrm{a}, \mathrm{b}, \mathrm{x})\right\|\right)$ (2)
where, $I_{c x}=d_c \Delta d_c$ and its diffusion coefficient is $\left(s\left(\nabla I_c\right)\right)$. After that, the Gaussian kernel function has been utilized to estimate the diffusion coefficients as illustrated in below:
$s\left(\left\|\nabla\left(G \times I_c\right)\right\|\right)$ (3)
Based on this value, the obtained anisotropic diffusion Gaussian function is computed as follows:
$I_c=\operatorname{div}\left(\beta . d_c\left(\left\|\nabla I_c\right\|\right) \cdot \nabla I_c\right)$ (4)
$\beta=1-\nabla G_\sigma \times d_c\left(I_c\right)$ (5)
where, $\beta$ indicates the adaptive term, and $G_\sigma$ denotes the Gaussian kernel. By using function, the image is normalized with the diffusion coefficients and, the preprocessed image can be utilized for further processes.
3.2 Gray Level Co-occurrence Matrix (GLCM) feature extraction
After preprocessing, the Gray Level Co-occurrence Matrix (GLCM) based feature extraction methodology is used for extracting the set of features from the normalized image. It is one of the extensively used texture based extraction model, where the relationship between the pixels are estimated according to the second-order statistical information. In this framework, four different types of GLCM features such as contrast, correlation, energy and homogeneity have been computed as shown in below:
$\operatorname{Con}_T=\sum_{x, y}|x-y|^2 p(x, y)$ (6)
$\operatorname{Cor}_r=\sum_{x, y} \frac{(x-\mu x)(y-\mu y) p(x, y)}{\sigma x \sigma y}$ (7)
$E n_g=\sum_{x, y} p(x, y)^2$ (8)
$\mathrm{Hom}_g=\sum_{x, y} \frac{p(x, y)}{1+|x-y|}$ (9)
where, x indicates the row of image, y indicates the column of image, and p is the total number of pixels in the image. In which, the contrast is defined as the color difference value that is mainly extracted for determining the objects of image. Then, the correlation is defined as the kind of dissimilarity measure that is mainly computed for analyzing the contrast of texture value. Similar to that, the energy is computed according to the global uniformity of the given image, and the homogeneity is estimated based on the proximity of element distribution. These features are more useful for improving the recognition rate of classifier.
3.3 Grey Wolf Optimization (GWO) based feature selection
After extracting the Gray Level Co-occurrence Matrix (GLCM) features, the Grey Wolf Optimization (GWO) based feature selection mechanism is utilized for selecting the best suitable features based on the optimal solution. It is a kind of meta-heuristic optimization technique and mainly used for solving complex optimization problems. The major benefits of using this technique are as follows: Increased convergence speed, best optimal solution with reduced number of iterations, and reduced complexity. Hence, the proposed work intends to utilize GWO technique for optimally selecting the features of preprocessed car image, which helps to train the classifier for improving the recognition rate. In this technique, the grey wolves are segregated into four different groups such as $\alpha, \beta, \delta$, and $\omega$, in which alpha, beta, and delta are considered as the most essential gray wolves. In addition to that, it effectively identifies the feature space for selecting the best subset of feature according to the fitness value. Here, the encircling behavior of grey wolves are computed as follows:
$\overrightarrow{\mathrm{GV}}(\mathrm{a}+1)=\overrightarrow{\mathrm{GV}}(\mathrm{a})+\overrightarrow{\mathrm{X}} \cdot \overrightarrow{\mathrm{Y}}$ (10)
where, $\overrightarrow{\mathrm{GV}}$ indicates the prey’s position vector, a is the number of iterations, $\overrightarrow{\mathrm{GV}_{\mathrm{p}}}$ defines the vector of grey wolf, and $\vec{X}, \vec{Y}$, and $\overrightarrow{\mathrm{Z}}$ are the coefficient vectors computed as follows:
$\overrightarrow{\mathrm{Z}}=\left|\overrightarrow{\mathrm{Y}} \cdot \overrightarrow{\mathrm{GV}_{\mathrm{P}}}(\mathrm{a})-\mathrm{GV}(\mathrm{a})\right|$ (11)
Similar to that, the coefficients $\overrightarrow{\mathrm{X}}, \overrightarrow{\mathrm{Y}}$ are estimated as shown in below:
$\overrightarrow{\mathrm{X}}=2 \overrightarrow{\mathrm{v}} \cdot \overrightarrow{\mathrm{t}_1}-\overrightarrow{\mathrm{v}}$ (12)
$\vec{Y}=2 \cdot \overrightarrow{t_2}$ (13)
where, $\overrightarrow{\mathrm{v}}$ indicates the vector value, $\overrightarrow{t_1}$ and $\overrightarrow{t_2}$ are the random values. Consequently, the best fitness value of grey wolves $\alpha, \beta, \delta$, and $\omega$ are computed as follows:
Fitness $=\alpha \mathrm{C}+\beta \frac{\mathrm{No}_{\mathrm{F}}-\mathrm{L}_{\mathrm{F}}}{\mathrm{L}_{\mathrm{F}}}$ (14)
where, $\mathrm{No}_{\mathrm{F}}$ indicates the number of features, and $\mathrm{L}_{\mathrm{F}}$ is the length of feature. The algorithmic steps involved in GWO technique are illustrated in below:
Algorithm I – Grey wolf optimization
Input: Extracted set of features, and Nn number of searching agents;
Output: Optimal solution OptB;
Step 1: Initialize the all populations of searching agents randomly as shown in below:
Si (i=1,2…n); //n-dimension
Step 2: Initialize the optimization variables as k, K and L;
Step 3: Compute the fitness of each search agent as illustrated below:
Sα = Best search agent;
Sβ = Second best;
Sδ = Third best;
Step 4: while (until reaching the stopping criterion) do
Step 5: for i = 1 to N do
The position of Si is updated;
end for;
Step 6: Update the positions of k, K and L;
Step 7: Estimate the fitness value;
Step 8: Update the parameters as, Sα, Sβ, and Sδ;
Step 9: end while;
Step 10: Return OptB=Sα;
3.4 Probability Correlated Neural Network (PCNN) based recognition
After optimization, the best suited features are considered as the input for classification, which is one of the essential stage in the recognition systems. When compared to the other classification approaches like KNN, DT, NB, C4.5, SVM, RVM, DNN, DBN, and LSTM. Here, the main purpose of using the classification technique is to accurately predict the desired car location with reduced time consumption. It is a kind of machine learning technique, which accepts the features as the input and predicted/recognized label as the output. In this algorithm, the input layers comprises the samples of $a_i=a_1, a_2 \ldots a_N$, where $a_i$ indicates the input vector, and it generates the output function as follows: $\mathrm{b}_{\mathrm{i}}=\mathrm{b}_1, \mathrm{~b}_2 \ldots \mathrm{b}_{\mathrm{N}}$. The algorithmic steps involved in this work are as follows:
Step 1: The center value is computed by estimating the distance value as shown in below:
$\mathrm{Di}_{\mathrm{s}}=\sum_{\mathrm{y}=1}^{\mathrm{n}} \exp \left(-\frac{\left\|\mathrm{a}_{\mathrm{i}}-\mathrm{p}_{\mathrm{i}}\right\|}{\left(\mathrm{Nei}_{\mathrm{r} / 2}\right)^2}\right)^2$
Step 2: $D i_s-D i_{t p} \exp \left(\frac{\| S_s-s_p}{\left(N^{-i} i_{r / 2}\right)^2}\right)^2$
Step 3: For all input samples, the distance value is computed as follows:
$\mathrm{F}_{\mathrm{xy}}=\left\|\mathrm{a}_{\mathrm{j}}-\mathrm{p}_{\mathrm{i}}\right\|$
Step 4: Correspondingly, the minimum distance value is estimated as follows:
$\mathrm{p}_{\mathrm{i}}^{\prime}=\frac{1}{\mathrm{~h}_{\mathrm{i}}} \sum_{\mathrm{a} \in \mathrm{c}_{\mathrm{i}}} \mathrm{a}(1 \leq \mathrm{b} \leq \mathrm{m})$
Step 5: Then, the cluster center is estimated and position updation are performed, and the output associates with the hidden layer could produce the recognized results.
Step 6: Finally, the weight value can be updated according to the learning parameter.
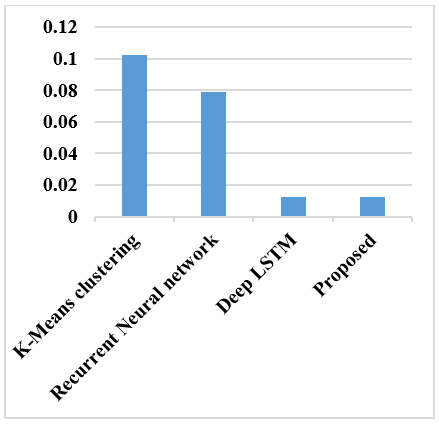
This section discusses the performance analysis of both conventional and proposed techniques used for developing the car parking system. Moreover, the effectiveness of the automated parking system for vehicles is evaluated by comparing images taken with and without vehicles parked in the designated area for parking. The user database that was generated contains information about approximately 100 images with cars and 100 images in which cars are not present in the parking area. Precision, recall, accuracy, F1-score, similarity coefficients, and time consumption are the various types of measures that are used for validating the results of the car parking system. Other types of measures include similarity coefficients. The Mean Absolute Error (MAE) of both existing and proposed techniques is displayed in Figure 3. These techniques fall into the categories of k-means, recurrent neural network, and deep Long Short Term Memory (LSTM), respectively. It has been determined, on the basis of this evaluation, that the GWO-PCNN technique provides a reduced MAE value when compared to the other techniques.
Figure 3. The Mean Absolute Error (MAE) analysis
Table 2 and Figure 4 compares the precision, recall and accuracy values of conventional and proposed recognition approaches. Normally, the performance of classifier is assessed based on the precision, recall and F1-score values. Based on the increased values of these parameters, the overall performance and effectiveness of this system has been determined. The measures are computed as follows:
Accuracy $=\frac{T P+T N}{T P+T N+F P+F N}$ (15)
Precision $=\frac{T P}{T P+F P}$ (16)
Recall $=\frac{T P}{T P+F N}$ (17)
F1_Score $=\frac{2 \times \text { Precision } \times \text { Recall }}{\text { Precision }+\text { Recall }}$ (18)
where, TP indicates the true positives, TN is the true negatives, FP is the false positives, and FN indicates the false negatives. From the analysis, it is evident that the precision, recall, F1-score, and accuracy of the proposed PCNN technique has been increased, when compared to the other techniques. In the proposed scheme, the optimal number of features are utilized for training the classifier, which helps to increase the overall performance of recognition system.
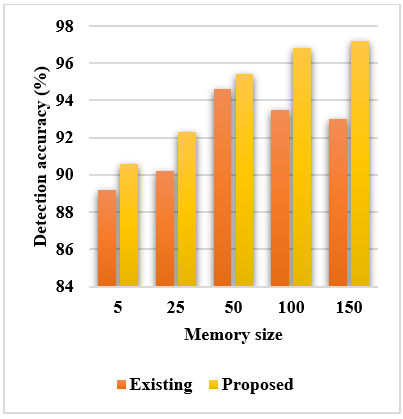
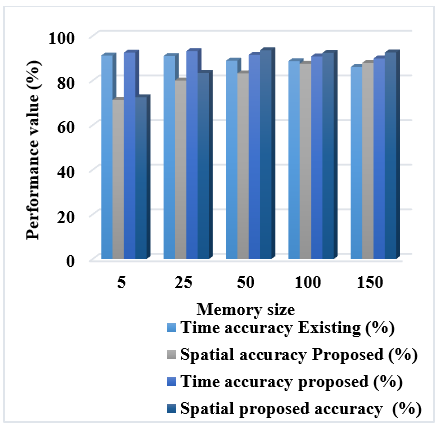
Table 3 and Figure 5 compares the detection accuracy of both conventional mask RCNN and proposed PCNN techniques with respect to varying memory size. Similar to that, Table 4 and Figure 6 evaluates the time and spatial accuracy of the security models corresponding to varying memory size. Normally, the overall performance of the classification approach is validated based on the level of accuracy. From the results, it is evident the accuracy of the proposed security model is efficiently improved, when compared to the other techniques.
Table 2. Analysis on precision, recall and accuracy
|
Metrics |
MLP |
KNN |
RF |
DT |
EL |
PCNN |
|
Precision |
64.63 |
73.04 |
86.90 |
91.12 |
92.79 |
96.8 |
|
Recall |
52.09 |
67.46 |
80.11 |
90.28 |
89.24 |
96.8 |
|
F1-score |
57.69 |
70.14 |
83.37 |
90.69 |
90.98 |
95.6 |
|
Accuracy |
70.48 |
76.71 |
86.50 |
92.25 |
92.54 |
98.5 |
Table 3. Detection accuracy
|
Memory size |
Mask RCNN |
Proposed |
|
5 |
89.2 |
90.6 |
|
25 |
90.2 |
92.3 |
|
50 |
94.6 |
95.4 |
|
100 |
93.5 |
96.8 |
|
150 |
93.0 |
97.2 |
Table 4. Time accuracy and spatial accuracy
|
Memory size |
Mask RCNN |
GWO-PCNN |
||
|
Time accuracy (%) |
Spatial accuracy (%) |
Time accuracy (%) |
Spatial accuracy (%) |
|
|
5 |
91.2 |
71.3 |
92.5 |
72.5 |
|
25 |
91 |
80 |
93.2 |
83.4 |
|
50 |
88.9 |
83.2 |
91.5 |
93.6 |
|
100 |
88.7 |
87.5 |
90.8 |
92.4 |
|
150 |
86.1 |
87.9 |
89.9 |
92.6 |
Figure 4. Comparative analysis between existing and proposed schemes
Figure 5. Detection accuracy of existing and proposed scheme
Figure 6. Spatial and time accuracy analysis of conventional and proposed techniques
This paper developed a new smart car parking system by using an IoT technology for avoiding the traffic congestion in the smart cities. The main purpose of this work was to develop an IoT based monitoring and controlling unit for reducing the waiting time, delay of process, and response time. Then, the controlling unit instructs the camera to capture the corresponding car image for monitoring the desired parking location of user. This type of monitoring system helps the user to easily find their vehicle in the parking place with reduced queuing time and delay time. Here, the Anisotropic Diffusion Gaussian Filtering (ADGF) technique is utilized to preprocess the input car image by increasing its contrast and quality of image. The proposed work intends to utilize the Grey Wolf Optimization (GWO) technique for optimally selecting the features of preprocessed car image, which helps to train the classifier for improving the recognition rate. The main purpose of using the PCNN classification technique is to accurately predict the desired car location with reduced time consumption. During evaluation, the performance of the proposed technique is validated and compared by using various measures. From the obtained results, it is concluded that the proposed GWO based PCNN technique outperforms the other techniques by accurately recognizing the car image with reduced error rate.
I would like to express my special thanks of gratitude to the Management, Principal and Head of the Department of ECE, Dr. MGR Education and Research, Chennai, India who gave me the opportunity to do this research work.
[1] Schneider, S., Greenberg, S., Taylor, G.W., Kremer, S.C. (2020). Three critical factors affecting automated image species recognition performance for camera traps. Ecology and Evolution, 10(7): 3503-3517. https://doi.org/10.1002/ece3.6147
[2] Ramasamy, M., Solanki, S.G., Natarajan, E., Keat, T.M. (2018). IoT based smart parking system for large parking lot. 2018 IEEE 4th International Symposium in Robotics and Manufacturing Automation (ROMA), pp. 1-4. https://doi.org/10.1109/ROMA46407.2018.8986731
[3] Alsafery, W., Alturki, B., Reiff-Marganiec, S., Jambi, K. (2018). Smart car parking system solution for the internet of things in smart cities. 2018 1st International Conference on Computer Applications & Information Security (ICCAIS), pp. 1-5. https://doi.org/10.1109/CAIS.2018.8442004
[4] Praveen, M., Harini, V. (2018). NB-IOT based smart car parking system. 2019 International Conference on Smart Structures and Systems (ICSSS), pp. 1-5. https://doi.org/10.1109/ICSSS.2019.8882847
[5] Ali, G., Ali, T., Irfan, M., Draz, U., Sohail, M., Glowacz, A., Sulowicz, M., Mielnik, R., Faheem, Z.B., Martis, C. (2020). IoT based smart parking system using deep long short memory network. Electronics, 9(10): 1696. http://dx.doi.org/10.3390/electronics9101696
[6] Muthubalaji, S., Srinivasan, S., Lakshmanan, M. (2021). IoT based energy management in smart energy system: A hybrid SO2SA technique. International Journal of Numerical Modelling: Electronic Networks, Devices and Fields, 34(5): e2893. https://doi.org/10.1002/jnm.2893
[7] Mahmud, S., Khan, G., Rahman, M., Zafar, H. (2013). A survey of intelligent car parking system. Journal of Applied Research and Technology, 11(5): 714-726. https://doi.org/10.1016/S1665-6423(13)71580-3
[8] Bonde, D.J., Shende, R.S., Kedari, A.S., Gaikwad, K.S. Bhokre, A.U. (2014). Automated car parking system commanded by Android application. 2014 International Conference on Computer Communication and Informatics, pp. 1-4. https://doi.org/10.1109/ICCCI.2014.6921729
[9] Chippalkatti, P., Kadam, G., Ichake, V. (2018). I-SPARK: IoT based smart parking system. 2018 International Conference On Advances in Communication and Computing Technology (ICACCT), pp. 473-477. https://doi.org/10.1109/ICACCT.2018.8529541
[10] Banerjee, S., Choudekar, P., Muju, M. (2011). Real time car parking system using image processing. 2011 3rd International Conference on Electronics Computer Technology, pp. 99-103. https://doi.org/10.1109/ICECTECH.2011.5941663
[11] Siraj, A., Shukla, V.K. (2020). Framework for personalized car parking system using proximity sensor. 2020 8th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), pp. 198-202. https://doi.org/10.1109/ICRITO48877.2020.9197853
[12] Mohammadi, F., Nazri, G.A., Saif, M. (2019). A real-time cloud-based intelligent car parking system for smart cities. 2019 IEEE 2nd International Conference on Information Communication and Signal Processing (ICICSP), pp. 235-240. https://doi.org/10.1109/ICICSP48821.2019.8958543
[13] James, A., Abraham, P. (2018). Smart car parking with reservation system using QR generator. IOP Conference Series Materials Science and Engineering, 396(1): 012019. http://dx.doi.org/10.1088/1757 899X/396/1/012019
[14] Hilmani, A., Maizate, A., Hassouni, L. (2018). Designing and managing a smart parking system using wireless sensor networks. Journal of Sensor and Actuator Networks, 7(2): 24. https://doi.org/10.3390/jsan7020024
[15] Mudaliar, S., Agali, S., Mudhol, S., Jambotkar, C. (2019). IoT based smart car parking system. Int J Sci Adv Res Technol, 5(1): 270-272.
[16] Khanna, A., Anand, R. (2016). IoT based smart parking system. Conference: International Conference on Internet of Things and Applications, pp. 266-270. http://dx.doi.org/10.1109/IOTA.2016.7562735
[17] Luque-Vega, L.F., Michel-Torres, D.A., Lopez-Neri, E., Carlos-Mancilla, M.A., González-Jiménez, L.E. (2020). IoT smart parking system based on the visual-aided smart vehicle presence sensor: SPIN-V. Sensors, 20(5): 1476. https://doi.org/10.3390/s20051476
[18] Thangam, E.C., Mohan, M., Ganesh, J., Sukesh, C. (2018). Internet of Things (IoT) based smart parking reservation system using raspberry-pi. International Journal of Applied Engineering Research, 13(8): 5759-5765.
[19] Lookmuang, R., Nambut, K., Usanavasin. S. (2018). Smart parking using IoT technology. 2018 5th International Conference on Business and Industrial Research (ICBIR), pp. 1-6. https://doi.org/10.1109/ICBIR.2018.8391155
[20] Sadhukhan, P. (2017). An IoT-based E-parking system for smart cities. 2017 International Conference on Advances in Computing, Communications and Informatics (ICACCI), pp. 1062-1066. https://doi.org/10.1109/ICACCI.2017.8125982
[21] Farag, M.S., El Din, M.M., El Shenbary, H. (2019). Parking entrance control using license plate detection and recognition. Indonesian Journal of Electrical Engineering and Computer Science, 15(1): 476-483. http://dx.doi.org/10.11591/ijeecs.v15.i1.pp476-483
[22] Pham, T.N., Tsai, M.F., Nguyen, D.B., Dow, C.R., Deng, D.J. (2015). A cloud-based smart-parking system based on Internet-of-Things technologies. In IEEE Access, 3: 1581-1591. https://doi.org/10.1109/ACCESS.2015.2477299
[23] Ke, R.M, Zhuang, Y.F., Pu, Z.Y., Wang, Y.H. (2020). A smart, efficient, and reliable parking surveillance system with edge artificial intelligence on IoT devices. In IEEE Transactions on Intelligent Transportation Systems, 22(8): 4962-4974. https://doi.org/10.1109/TITS.2020.2984197
[24] Zantalis, F., Koulouras, G., Karabetsos, S., Kandris, D. (2019). A review of machine learning and IoT in smart transportation. Future Internet, 11(4): 94. https://doi.org/10.3390/fi11040094
[25] Cui, L.Z., Yang, S., Chen, F., Ming, Z., Lu, N., Qin, J. (2018). A survey on application of machine learning for Internet of Things. International Journal of Machine Learning and Cybernetics, 9(8): 1399-1417. https://doi.org/10.1007/s13042-018-0834-5
[26] Acharya, D., Yan, W., Khoshelham, K. (2018). Real-time image-based parking occupancy detection using deep learning. Proceedings of the 5th Annual Research@Locate Conference, Adelaide, Australia, 4: 33-40.
[27] Mendiratta, S., Dey, D., Sona, D.R. (2017). Automatic car parking system with visual indicator along with IoT. 2017 International conference on Microelectronic Devices, Circuits and Systems (ICMDCS), pp. 1-3. https://doi.org/10.1109/ICMDCS.2017.8211549
[28] Saeliw, A., Hualkasin, W., Puttinaovarat, S., Khaimook, K. (2019). Smart car parking mobile application based on RFID and IoT. International Journal of Interactive Mobile Technologies (IJIM), 13(05): 4. http://dx.doi.org/10.3991/ijim.v13i05.10096
[29] Meduri, P., Telles, E. (2018). A haar-cascade classifier based smart parking system. pp. 66-70.
[30] Awan, F.M., Saleem, Y., Minerva, R., Crespi, N. (2020). A comparative analysis of machine/deep learning models for parking space availability prediction. Sensors, 20(1): 322. https://doi.org/10.3390/s20010322
[31] Foughali, A., Kitouni, I., Benmerzoug, D. (2022). ODMR-IoT: Outliers detection based multipath routing protocol for Internet of Things (IoT). Ingénierie des Systèmes d’Information, 27(3): 377-385. https://doi.org/10.18280/isi.270303