Anissa Khiter* | Amel B.H. Adamou Mitiche | Lahcene Mitiche
© 2020 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
The electrocardiogram (ECG) signal is exposed to many types of noise due to its sensitivity, especially those high-frequency noises, the most important of which is the electromyogram (EMG) noise whose spectrum overlaps with the spectrum of the ECG signal, which impedes the correct diagnosis of heart diseases. In this paper, a new adaptive filter for EMG noise removing from corrupted ECG signal is proposed; the filter is based on self correcting leaky normalized least mean square algorithm SC-LNLMS with varied step size and varied leakage coefficient, the corrupted signal passes through noise canceller filter based on leaky normalized least square algorithm using multiple stages and under adjusting both step size and leakage coefficient. Testing was performed using noise free ECG signals from the MIT-BIH Arrhythmia database and the noise from Noise Stress Test database (nstdb). The experimental results show that the proposed denoising filter achieves better output signal-to-noise ratio (SNR), improvement SNR and lower mean square error (MSE) when compared to other existing techniques. besides preserving the original shape of the signal without causing distortions in the low-amplitude. Using the proposed denoising filter, the average output SNR varies from 16.53 to 28.56 dB, and the MSE less than 0.00000045.
ECG signal, EMG noise, noise canceller, step size, leakage coefficient, normalized least square, self correcting filter
An electrocardiogram (ECG) displays the heart electrical activity recorded by the electrodes placed on the human body surface; and because of its importance in the detection of various heart diseases, it should be clear of all types of noise that affect its waves and intervals; and therefore lead to errors in the diagnosis, which sometimes leads to sudden death [1], such unwanted interference are electrode motion (EM), muscle noise (EMG noise) and baseline wander (BW) [2]. One of the most worrying, high frequency noises in the recording of ECG signals is the presence of EMG noise which is due to patient muscular activity; it behaves as a random wide band spectrum signal, seriously overlapping the ECG spectrum; mainly with the spectrum of the QRS complex where most energy of ECG signal is collected, and on the other hand low-amplitudes (P- and T-waves) are totally covered by EMG noise [1], thus removing noise from corrupted ECG signal is an absolute requirement for correct and accurate diagnosis.
Many denoising methods were proposed for EMG noise removal from ECG signal, Thakor NV, Zhu YS proposed a recurrent least mean square (LMS) filter structure for obtaining the impulse response of the normal QRS complex and then applied it for arrhythmia detection in ambulatory ECG recordings, they show the effectiveness of such recurrent filter in detecting cardiac arrhythmia by noise reduction. However, the filter does not work adequately when only a single lead is available or when EMG noise arises at all the electrodes [3]. By considering the ECG signal slope an approximation filtering using dynamically variable samples number and weighting coefficients was proposed by Christov and Daskalov, the method showed considerable reduction in the EMG noise and maintained the ECG signal amplitude. However, a small widening of some original QRS complexes was obtained [4]. Satheeskumaran and Sabrigiriraj [5] proposed an adaptive filter based on step-size delayed LMS (VSS-DLMS) with pipeline architecture for ECG feature extraction improvement and noise removal, the estimation delayed error and the noisy signal both are used as two inputs to VSS-DLMS to update the filter tap coefficients, the method provided highly output SNR and low MSE and reduced calculation multiplicity. El B’charri et al. [6] investigated the dual-tree wavelet transform (DT-WT) using tuning threshold to reduce synthetic, realistic, and colored noises in ECG signals; the performance of the method is affected by varying the threshold value, wavelet function and decomposition level, the method achieved superior results over conventional DWT in removing all kinds of noises. However, wavelet is non-adaptive tool in denoising ECG signal because of its dependent on the selection of wavelet function and thresholding technique. Venkatesan et al. [7] proposed a delayed error normalized LMS (DENLMS) with pipelined architecture for noise removal from ECG signal; a comparison with error normalized mean square (NLMS) and delayed NLMS algorithms, the pipelined DENLMS showed an increase in operation speed and reduction in power consumption because of the aspect of latches. Kumar et al. proposed combination filter between empirical mode decomposition (EMD) with non-local mean (NLM) to denoise ECG signal; They collected information related to the input noise by calculating the differential standard deviation before passing it to the EMD filter with the aim of reducing noise, then the output obtained is passed through the NLM with aim of preserving ECG signal edges; the method showed superior results in term of mean square error (MSE), mean SNR improvement, and mean of percent root- mean-square difference (PRD). EMD is not ideal in denoising non-stationary signal unless it combined with another algorithm [8]. Poungponsri and Yu [9] proposed a combination between multi-resolution discrete wavelet transform (DWT) and the adaptive learning potentiality of artificial neural networks for noise removing from ECG signal, the obtained coefficients from thresholding technique in DWT step was used as input to the neural network in initial filtering. Then, the obtained filtered ECG signal after converted to time domain was used as input to neural network in final filtering; the neural network in the final filtering accomplishes the inverse DWT to the output. The combination showed satisfactory results to remove the noise with important improvement on SNR. Mohammad Zia-Ur-Rahman et al. proposed an adaptive noise canceller based on leaky NLMS algorithm for noise removal from ECG signal, by introducing new variable step size containing the leaky coefficient in the weight update function; the results showed that the performance of the LNLMS based algorithm outperforms LMS based algorithm either in quantitative and qualitative results [10]. Liu et al. [11] proposed a guided filter based on Butterworth high-pass filter for EMG and EM based noises removal from ECG signals; a prefiltering of ECG signals using Butterworth high-pass filter was used to remove BW, then removed ECG signals whose frequencies are between the BW will be retrieved using the edge-preserving guided filter passing through average template algorithm, The obtained results showed better SNR, root-mean-square error (RMSE) and features edge-preserving compared with other methods. However, the method has the risk of not recovering all the removed information which is important for interpreting the ECG signal.
Adaptive noise canceller technique has widely exploited LMS and modified LMS-type algorithms. The concept of this technique is to estimate signals that are corrupted with additive noise by minimizing the MSE between a primary input containing noisy ECG and a reference input containing noise correlated in some ways with the primary noise [12]. Many paper has proposed the LMS and modified LMS-type algorithms in aim of noise reduction from corrupted ECG signal [3, 5, 7, 10], they have analyzed the performance of such algorithm by studying and discussing different satisfactory conditions of different parameters such as step size parameter, filter length number, digital filter type and leakage coefficient to enhance some factors of robustness such convergence speed, computational efficiency and digital implementation stability of LMS algorithm. Despite the success of the articles mentioned above in reducing the noise from the ECG signal, it suffers from repeated random calculations to obtain the best result performances, and this is due to the limitation of the algorithms in one stage with one fixed or variable parameter, and also its lack of progressive monitoring of the ECG signal waves, especially those With low amplitudes, which are very important in diagnosing some specifics of heart function. In this paper, we propose an adaptive filter named self correcting leaky normalized least mean square (SC-LNLMS) with varied step size and varied leakage coefficient in each stage to remove real EMG noise from real corrupted ECG signal without distorting the characteristics and shape of its waves. This paper is organized as follows; the proposed new adaptive filter is explained in Section 2. The results and discussion are presented in Section 3. Final section presents the conclusion.
2.1 Leaky normalized LMS algorithm
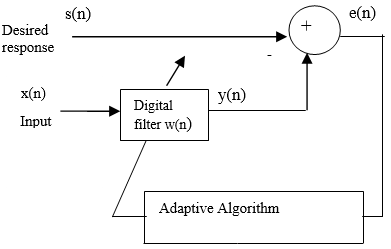
The LMS algorithm was largely used in many applications such noise cancellation, line prediction, and identification purposes [13] due to its simplicity of direct implementation, and its robust performance. By considering a length N in samples of the time-domain signal; and M is the filter length; the block diagram of adaptive noise canceler is shown in Figure 1, that takes an input sequence x(n), and the weights updated is given by Eq. (1) as follows:
Figure 1. Block diagram of adaptive noise canceler
$w(n+1)=w(n)+\mu(x(n) e(n))$ (1)
n represents the discrete time (n=0, 1…., N-1) and μ is the adaptation step size that determines the amount of correction applied as the filter adapts from one iteration to the next. To ensure stability of the adaptive process, the value of μ has to satisfy the follow condition:
$0<\mu<\frac{2}{\text { Tap - input power }}$ (2)
The Tap-input power is the sum of the mean square values of all the tap inputs in the transversal filter.
The filter output, filter taps, estimation error and input data are given by Eq. (3), Eq. (4), Eq. (5) and Eq. (6) respectively as follows:
$y(n)=w^{T}(n) x(n)$ (3)
$w(n)=\left[w_{Q}(n) w_{1}(n) \ldots \ldots w_{M-1}(n)\right]^{T}$ (4)
$e(n)=s(n)-y(n)$ (5)
$x(n)=[x(n) x(n-1) x(n-2) \ldots x(n-M)+1)]^{T}$ (6)
where, s(n) is the desired noise free signal. In this paper; the EMG noise is defined as the additive noise vEMG(n) which is one of high frequency noise type contain maximum frequency range varies from 1-10000Hz and voltage levels of 0.1-10Mv, this noise denotes a critical complication in many ECG applications, especially in recordings collected during exercise and while recording the ECG using chest leads. The noisy ECG signal is defined as the input data x(n) (to the digital filter) which is an additive mixture of the noise-free signal s(n) and the noise $v_{E M G}(n)$ as illustrated in Eq. (7):
$x(n)=s(n)+v_{F M f f}(n)$ (7)
The limitation of LMS algorithm occurs during the digital implementation where the input data and internal calculations are quantized to finite precision (round-off errors), the quantization process affect the performance of the LMS algorithm by a number of factors such the degree of ill-conditioning (almost singular) in the elementary correlation matrix of the input data, stalling phenomena which occurs when the correction term is too small (the digital implementation of LMS stop adapting), and finally the overflow resulting from finite-precision arithmetic [14], hence to further stabilize the digital implementation of LMS algorithm by improving last undesirable factors; the introduction of leakage coefficient into LMS algorithm was needed to get leaky least mean square algorithm LLMS [15, 16]. The weight update equation of LLMS algorithm is given by Eq. (8) as follows:
$w(n+1)=(1-\mu \gamma) w(n)+\mu x(n) e(n)$ (8)
The factor $(1-\mu \gamma)$ is called leakage coefficient that satisfies the follow condition:
$0 \leq \gamma<\frac{1}{\mu}$ (9)
The normalization version of LLMS algorithm was introduced by Nore et al. [10]. By combining LLMS and NLMS algorithm to get leaky normalized least mean square algorithm (LNLMS) in aim to improve both stability and filtering capability because of the normalization factor and leaky coefficient. The weights update relation for LNLMS algorithms is given by Eq. (10) as follows:
$w(n+1)=w(n)+\frac{(1-\mu \gamma)}{\rho+x^{T}(n) x(n)} x(n) e(n)$ (10)
where, $\rho+x^{T}(n) x(n)$ is the normalization factor and $\rho$ is a small constant introduced to preserve the stability in cases where the input is close to zero.
The new time varying step size parameter normalized with every new sample according to input power in Eq. (10) is given by Eq. (11), As the input signal power changes, the algorithm computes the input power and adjusts the step size to preserve an adapted value. Thus, the step size changes with time and hence the LNLMS improves the convergence performance.
$\mu(n)=\frac{(1-\mu \gamma)}{\rho+x^{T}(n) x(n)}$ (11)
2.2 Self correcting leaky normalized LMS algorithm (SC-LNLMS) with varied step size and leakage coefficient
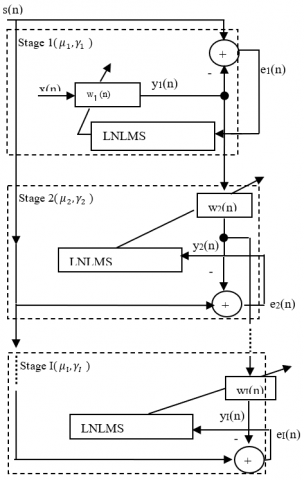
The Self-correcting adaptive filtering (SCAF) is a practical measure that was used to evaluate the performance of an adaptive filtering and enhance the precision of the filter output with small order [17, 18]. This method based on employing multiple stages (iterations) of the adaptive noise canceller, the desired input signal is the same for all stages, but the first output of the first stage will used as the new noisy input sequence of the second stage and so on for next stages under a constant step size which is determined in the first stage. The block diagram of the SCAF filtering based on SC-LNMS algorithm is shown by Figure 2.
Figure 2. Block diagram of the SCAF filtering based on SC-LNMS algorithm
In this paper, we propose a self correcting noise canceller based on leaky normalized least square adaptive algorithm under varied step size and varied leakage coefficient in each stage. Thus, the corresponding new formula of the weights update relation for LNLMS algorithms is given by Eq. (12) as follows:
$w_{i}(n+1)=w_{i}(n)+\frac{1-\mu_{i} \gamma_{i}}{\rho+x_{i}^{T}(n) x_{i}(n)} x_{i}(n) e_{i}(n)$ (12)
where, i is the number of the stage (i=1, …., I). We adjust the step size and leakage coefficient values in each stage by searching the optimal output SNR value and MSE values. The SNR and MSE are calculated as given by Eq. (13) and Eq. (14) respectively as follows:
$S N R_{o u t}=10 \log _{10}\left(\frac{\sum_{n=0}^{N-1}[s(n)]^{2}}{\sum_{n=0}^{N-1}\left[y_{I}(n)-s(n)\right]^{2}}\right)[d B]$ (13)
$M S E=\frac{1}{N} \sum_{n=0}^{N-1}\left(s(n)-y_{I}(n)\right)^{2}$ (14)
where, $y_{I}(n)$ is the output of the last stage and I is the number of iterations or stages, the desired signal is compared with signals that become closer and closer to it. The relation between the output of the ith stage and the previous one is given by Eq. (15) as follows:
$y_{i+1}(n)=y_{i} * w_{i+1}$ (15)
Implementation and performance evaluation of our proposed adaptive filter SC-LNLMS with varied step size and varied leakage coefficient has been validated using diverse real free noise ECG signal recordings with a large collection of wave morphologies from MIT-BIH arrhythmia database [19], and the real EMG noise (in record 'MA') is taken from MIT-BIH noise stress test database [20]. In both databases the recordings were digitized at 360 samples per second. In our experiments we created the realistic noisy ECG signals by adding 5 and 10 dB SNR level noises to the free noise signals; and we used a data set of eight records (records 100, 105, 107, 118, 200, 205, 213 and 217).
All of the simulations in this paper are based upon the structure shown in Figure 2, under investigating the better filter length M, step sizes and leakage coefficients. This section is subdivided into qualitative and quantitative results.
3.1 Qualitative results
In qualitative sub section, the simulation results of the proposed filtering methodology for record 105 data number of MIT-BIH arrhythmia database are shown.
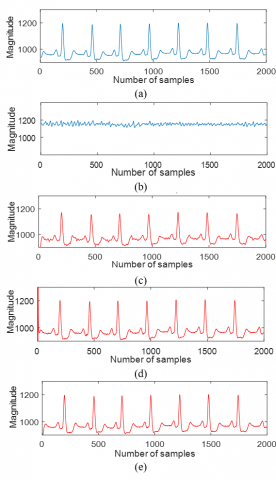
Figure 3 displays the outputs of the proposed filtering for noise cancelation from noisy ECG signal created by using added MA noise at 10 dB input SNR level. Figure 3a shows noise free ECG signal. Figure 3b shows the noisy ECG signal. Figure 3c shows the output of the first stage, Figure 3d shows the output of the second stage, and Figure 3e shows the output of the third stage.
Figure 4 displays the outputs of the proposed filtering for noise cancelation from noisy ECG signal created by using added MA noise at 5 dB input SNR level. Figure 4a shows noise free ECG signal. Figure 4b shows the noisy ECG signal. Figure 4c shows the output of the first stage, Figure 4d shows the output of the second stage, and Figure 4e shows the output of the third stage.
As we can see in Figure 3 and Figure 4, whatever the added noise signal is weak or large; the proposed method has a better filtering effect on MA denoising, and even into the outputs of the first and second stages (Figure 3c, Figure 3d, Figure 4c, Figure 4d) there are a little noise but the signals still keep the details, contrasted with the conventional filters which can remove most of the MA noise, but also filtrate the details, also the proposed filtering gives better results in noise reduction when comparing the last outputs (Figure 3e, Figure 4e) with first outputs (Figure 3c, Figure 4c) which are the out puts of conventional LNLMS filtering.
During applying our proposed denoising technique to many corrupted ECG signals, We found that the best length for filter M for some signals is 3 and for others it is 4, and we found that most signals do not need more than three stages in order to reduce a largest amount of noise without distorting small wavelets such P and T waves. Besides, we adjust the step size and leakage coefficient taking into account the condition. 9, and not only adjusted them different from one stage to another, but also different from one signal to another.
Figure 3. Outputs of ECG noise denoising technique using proposed method, (a)Noise free ECG signal (record 105 from MIT-BIH), (b) Noisy ECG signal with added MA noise at 5 dB, (c)First stage of denoised ECG signal, (d) Second stage of denoised ECG signal, (e) Third stage of denoised ECG signal
Figure 4. Outputs of ECG noise denoising technique using proposed method, (a)Noise free ECG signal (record 105 from MIT-BIH), (b) Noisy ECG signal with added MA noise at 10 dB, (c) First stage of denoised ECG signal, (d) Second stage of denoised ECG signal, (e) Third stage of denoised ECG signal
3.2 Quantitative results and discussion
In quantitative subsection, output SNR (SNRout), SNR improvement and mean square error (MSE) of the proposed filtering methodology is shown and compared with SNRout, MSE, and SNR improvement of other techniques for denoising of ECG signal such as dual tree wavelet transform [6], empirical mode decomposition (EMD) with non-local mean (NLM) technique [8], neural networks technique [9], leaky normalized least mean square technique [10] and, Constructing a Guided Filter [11].
Table 1 illustrates the performances MSE and SNRout of the proposed filtering method when acting with MA noise added at 5 and 10 dB input SNR for the first and the last stage. The results of processing the data number 100, 105, 107, 118, 200, 205, 213 and 217 shows that the SNRout is improved from first stage to the last stage, for example SNRout of the first stage for data number 105 is 20.87 dB while it achieves 28.56 dB for the last stage when considering added MA at 10 dB, and when considering added MA at 5 dB it is 16.40 dB and 20.86 dB for first and last stage respectively. The proposed denosing technique also achieves best MSE at last stage that alternating from 0.0003462 to 5.059e-7 when considering added MA at 10 dB, and when considering added MA at 5 dB it alternates from 0.0033742 to 0.0001032.
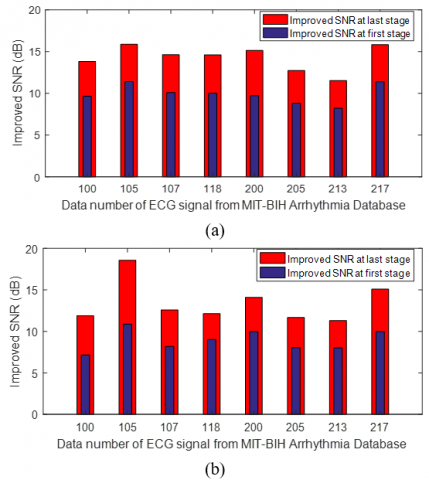
Figure 5 displays the performance SNR improvement of the proposed filtering. Figure 5a displays SNR improvement between the first and the last stage when acting with MA noise added at 5dB input SNR level. Figure 5b displays SNR improvement between the first and the last stage when acting with MA noise added at 10 dB input SNR level. We see from Figure 5a that the improvement SNR alternates from 3.31 dB resulting from processing data number 213 to 5.42 dB resulting from processing data number 200, and from Figure 5b the SNR improvement alternates from 3.13 dB resulting from processing data number 118 to 7.69 dB resulting from processing data number 105. It is clear that the improvement SNR is significantly improved from the first stage to the last stage due to varied both step size and leakage coefficient in each stage that are controllable to achieve better SNR without distorting the shape of the original ECG signal.
Table 2 illustrates the performances of the proposed filtering in terms of SNR improvement and MSE compared with dual tree wavelet transform [6], empirical mode decomposition (EMD) with non-local mean (NLM) technique [8], neural networks technique [9], leaky normalized least mean square technique [10], and constructing a Guided Filter [11] in aim of noise reduction from corrupted ECG signal. The results show that that at 10 dB input SNR level; the output of our proposed method achieves 18.56 dB of SNR improvement and 5.059e-7 of MSE. While, the outputs obtained in empirical mode decomposition (EMD) with non-local mean (NLM) technique [8], neural networks technique [9], and leaky normalized least mean square technique [10] have SNR improvement less than 12 dB, 15.72 dB and 11.8843 dB respectively, and regarding MSE; the reference [8] achieved 0.000472. Also, the results show that at 5 dB input SNR level; the output of our proposed method achieves 15.86 dB of SNR improvement and 0.000103 of MSE. While, the outputs obtained in dual tree wavelet transform [6] and constructing a Guided Filter [11] have 7.21953 dB and 11.53 dB respectively, and regarding MSE; the reference [6] achieved 0.00277. It is clear from Table 2 that the proposed SC-LNLMS with varied step size and leakage coefficient significantly outperforms other mentioned techniques both in achieved SNR improvement and MSE.
In this paper, we have proposed a novel adaptive denoising method named self correcting leaky normalized least mean square algorithm with varied step size and leakage coefficient for removal of MA noise from corrupted ECG signal. The experimental results presented in this paper has shown the effectiveness of our method in improving the output SNR and reducing MSE to obtain clean ECG records that contains all its distinctive features without introducing distortion on the original signal compared to other existing techniques like dual tree wavelet transform, empirical mode decomposition (EMD) with non-local mean (NLM) technique, neural networks technique, leaky ormalized least mean square technique and, constructing a guided filter by exploiting the butterworth filter for ECG signal enhancement. The success achieved by our method is due to relying first on leakage coefficient, which interfere with the difficulty of controlling the step size coefficient and secondly on the self correction of the filter who gave interval to change both step size and leakage coefficients from one stage to a stage according to the abrupt changes of the signal, and on the other hand speed up the treatment process.
Table 1. Experimental results of proposed method (expressed as output SNR in dB, and MSE) for MA noise removal at 5 dB and 10 dB
|
|
SNR in=10dB |
SNR in=5dB |
||||
|
Signals |
SNRout First stage |
SNRout (last stage) |
MSE at last stage |
SNRout (First stage) |
SNRout (last stage) |
MSE at last stage |
|
100 |
17.15 |
21.87 |
0.0001200 |
14.64 |
18.82 |
0.0005801 |
|
105 |
20.87 |
28.56 |
5.059e-7 |
16.40 |
20.86 |
0.0001032 |
|
107 |
18.19 |
22.59 |
0.0000461 |
15.09 |
19.63 |
0.0002840 |
|
118 |
19.01 |
22.14 |
0.0000987 |
15.01 |
19.60 |
0.0001970 |
|
200 |
19.97 |
24.10 |
0.0000053 |
14.72 |
20.14 |
0.0002800 |
|
205 |
18.05 |
21.66 |
0.0003125 |
13.81 |
17.73 |
0.0010141 |
|
213 |
18.01 |
21.30 |
0.0003462 |
13.22 |
16.53 |
0.0033742 |
|
217 |
19.98 |
25.09 |
0.0000099 |
16.39 |
20.82 |
0.0001210 |
Table 2. Experimental results expressed as improvement SNR (in Db) and MSE for MA noise removal compared with other existing technique
|
Input SNR (dB) |
10 |
5 |
||
|
Denoising methods |
SNR improvement (dB) |
MSE |
SNR improvement (dB) |
MSE |
|
Proposed method |
18.56 |
5.059e-7 |
15.86 |
0.0144 |
|
Reference [8] |
<12 |
0.000472 |
<11 |
0.001021 |
|
Reference [9] |
15.72 |
/ |
/ |
/ |
|
Reference [10] |
11.8843 |
/ |
/ |
/ |
|
Reference [11] |
/ |
/ |
11.53 |
/ |
|
Reference [6] |
/ |
/ |
7.21953 |
0.00277 |
[1] Sornmo, L., Laguna, P. (2005). Bioelectrical Signal Processing in Cardiac and Neurological Applications. Academic Press. https://doi.org/10.1016/B978-0-12-437552-9.X5000-4
[2] Shamsollahi, M.B. (2008). ECG Denoising and compression using a modified extended Kalman filter structure. IEEE Transactions on Biomedical Engineering, 55(9): 2240-2248. https://doi.org/10.1109/tbme.2008.921150
[3] Thakor, N.V., Zhu, Y.S. (1991). Applications of adaptive filtering to ECG analysis: Noise cancellation and arrhythmia detection. IEEE Transaction Biomedical Engineering, 38(8): 785-794. https://doi.org/10.1109/10.83591
[4] Christov, I., Daskalov, I. (1999). Filtering of electrocardiogram artifacts from the electrocardiogram. Medical Engineering & Physics, 21(10): 731-736 https://doi.org/10.1016/s1350-4533(99)00098-3
[5] Satheeskumaran, S., Sabrigiriraj, M. (2015). VLSI implementation of a new LMS-based algorithm for noise removal in ECG signals. International Journal of Electronics, 103(6): 975-984. https://doi.org/10.1080/00207217.2015.1082204
[6] El B’charri, O., Latif, R., Elmansouri, K., Abenaou, A., Jenkal, W. (2017). ECG signal performance denoising assessment based on threshold tuning of dual‑tree wavelet transform. BioMedical Engineering OnLine, 16: 26. https://doi.org/10.1186/s12938-017-0315-1
[7] Venkatesan, C., Karthigaikumar, P., Varatharajan, R. (2018). FPGA implementation of modified error normalized LMS adaptive filter for ECG noise removal. Cluster Computing, 22: 12233-12241. https://doi.org/10.1007/s10586-017-1602-0
[8] Kumar, S., Panigrahy, D., Sahu, P.K. (2018). Denoising of Electrocardiogram (ECG) signal by using empirical mode decomposition (EMD) with non-local mean (NLM) technique. Biocybernetics and Biomedical Engineering, 38(2): 297-312. https://doi.org/10.1016/j.bbe.2018.01.005
[9] Poungponsri, S., Yu, X.H. (2013). An adaptive filtering approach for electrocardiogram (ECG) signal noise reduction using neural networks. Neurocomputing, 117(6): 206-213. https://doi.org/10.1016/j.neucom.2013.02.010
[10] Nore, S., Basha., J., Mohammad, Z.U.R., Rama, B.V. (2011). Noise removal from electrocardiogram signals using leaky and normalized version of adaptive noise canceller. International Journal of Computer Science & Communication Networks, 1(1): 81-84.
[11] Liu, M., Hao, H.Q., Xiong, P., Lin, F., Hou, Z.G., Liu, X.L. (2017). Constructing a guided filter by exploiting the Butterworth filter for ECG signal enhancement. Journal of Medical and Biological Engineering, 38: 980-992. https://doi.org/10.1007/s40846-017-0350-1
[12] Widrow, B., Glover, J.R., McCool, J.M., Kaunitz, J., Williams, C.S., Hearn, R.H., Zeidler, J.R., Jr. Eugene Dong, Goodlin, R.C. (1975). Adaptive noise cancelling: principles and applications. Proceedings of the IEEE, 63(12): 1692-1716. https://doi.org/10.1109/proc.1975.10036
[13] Chergui, L., Bouguezel, S. (2019). A new post-whitening transform domain LMS algorithm. Traitement du Signal, 36(3): 245-252. https://doi.org/10.18280/ts.360307
[14] Haykin, S., Totterdill, P. (2001). Adaptive Filter Theory. Prentice Hall.
[15] Zahm, C.L. (1973). Applications of adaptive arrays to suppress strong jammers in the presence of weak signals. IEEE Transactions on Aerospace and Electronic Systems, 9(2): 260-271. https://doi.org/10.1109/taes.1973.309794
[16] Gitlin, R.D. Meadors, H.C., Weinstein, S.B. (1982). The tap-leakage algorithm: An algorithm for the stable operation of a digitally implemented, fractionally adaptive spaced equalizer. Bell System Technical Journal, 61(8): 1817-1839. https://doi.org/10.1002/j.1538-7305.1982.tb03086.x
[17] Kim, J., Poularikas, A.D. (2003). Comparison of two proposed methods in adaptive noise canceling. IEEE 35th Southeastern Symposium on System Theory, Morgantown, WV, USA, pp. 400-403. https://doi.org/10.1109/ssst.2003.1194600
[18] Kim, J., Perry, E.T. (2005). Performance analysis of the self-correcting adaptive filter. IEEE Proceedings of the Thirty-Seventh Southeastern Symposium on System Theory (SSST05), Tuskegee, AL, USA, pp. 316-319. https://doi.org/10.1109/ssst.2005.1460929
[19] Moody, G.B., Mark, R.G. (2001). The impact of the MIT-BIH arrhythmia database. IEEE Engineering in Medicine and Biology Magazine, 20(3): 45-50. https://doi.org/10.1109/51.932724
[20] Moody, G.B., Muldrow, W.E., Mark, R.G. (1984). A noise stress test for arrhythmia detectors. Computers in Cardiology, 11: 381-384. https://doi.org/10.13026/C2HS3T