Development of Ultrasonic Surface Acoustic Wave Humidity Sensors
Développement de Capteurs d’Humidité Ultrasonores à ondes Acoustiques de Surface

Saliou Ndao | Marc Duquennoy* | Christian Courtois | Mohammadi Ouaftouh | Mohamed Rguiti | Nikolay Smagin | Frédéric Rivart | Maurice Gonon | Grégory Martic | Christine Pélegris | Frédéric Jenot
© 2020 IIETA. This article is published by IIETA and is licensed under the CC BY 4.0 license (http://creativecommons.org/licenses/by/4.0/).
OPEN ACCESS
In a European project called CUBISM, humidity sensors based on IDT (Inter Digital Transducer) technology are developed for the generation and detection of surface acoustic waves (SAW). These sensors are designed to operate at high temperature (500°C) for monitoring the drying of refractory concrete. Indeed, this humidity monitoring is important because a sudden evaporation of the water during the achievement of the structure could lead to high pressures in the pores implying consequently the destruction of the structure. Thus, the optimization of the concrete drying cycle must be combined with relevant in-situ physical measurements (humidity, pressure, temperature) and thermomechanical modelling. The real-time availability of this physical data via specific sensors integrated into the concrete is therefore a key to effective drying monitoring. Thus, for this project and its specific constraints, we have chosen the development of SAW humidity sensors because they are the most suitable to meet the specifications. In this study, the optimized parameters include the nature of the humidity-sensitive layer, the nature of the piezoelectric substrate, the architecture of the electrode array and finally the electronic measurement setup.
RÉSUMÉ :
Dans le cadre d’un projet européen nommé CUBISM, des capteurs d’humidité basés sur la technologie IDT (Inter Digital Transducer) pour la génération et la détection des ondes acoustiques de surface ou SAW (Surface Acoustic Wave) sont développés. Ces capteurs sont destinés à fonctionner à haute température (500°C) pour le suivi du séchage du béton réfractaire. Ce suivi de l’humidité est en effet important car une évaporation brusque de l’eau lors de la mise en œuvre risque d’exercer de fortes pressions au niveau des pores et par conséquent peut conduire à l’explosion de la structure. Ainsi, l'optimisation du cycle de séchage du béton doit être associée à des mesures physiques in-situ pertinentes (humidité, pression, température) et à de la modélisation thermomécanique. La disponibilité en temps réel de ces données physiques via des capteurs spécifiques intégrés dans le béton, est donc une clef pour un monitoring efficace du séchage. Ainsi, pour ce projet et ses contraintes spécifiques, nous avons privilégié le développement de capteurs d’humidité SAW car ils sont les plus à même de répondre au cahier des charges. Dans cette étude, les paramètres optimisés sont notamment la nature de la couche sensible à l’humidité, la nature du substrat piézoélectrique, l’architecture du réseau d’électrodes et enfin la chaîne de mesure électronique.
humidity sensor, SAW sensor, ultrasonic sensor, interdigital sensor, surface acoustic wave
Mots-clés :
Capteur d’humidité, Capteur SAW, Capteur ultrasonore, Capteur interdigité, Onde acoustique de surface
La surveillance et le contrôle de l’humidité est un facteur important dans le contrôle de différents environnements. En raison des propriétés uniques de l'eau, l'humidité influence grandement les organismes vivants et les matériaux [1]. Par conséquent, la mesure et le contrôle de l'humidité sont essentiels à de nombreux procédés de fabrication tels que les industries du textile, de la transformation des aliments, du papier, des semi-conducteurs et de la pétrochimie ainsi que dans les opérations de séchage. Les capteurs d’humidité ont fait l’objet de nombreuses recherches et plusieurs types de matériaux ont été utilisés pour la détection de l’humidité. Des oxydes métalliques, des polymères ainsi que d’autres matériaux composites sont utilisés comme couches sensibles à l’humidité [2, 3].
Les capteurs d'humidité sont généralement développés en utilisant trois approches basées sur des mesures de résistance, des mesures de capacité électrique ou des mesures de résonance acoustique. Nous proposons une quatrième approche, un peu plus marginale, basée sur des mesures de temps de vol et d’amplitude d’ondes acoustiques de surface (Surface Acoustic Wave, SAW).
Compte tenu des contraintes spécifiques de mesure (coût modéré, mesure jusqu’à des températures élevées de 500°C), des capteurs SAW basés sur des transducteurs interdigités ont été choisis. Ce système de détection d'humidité consiste à générer les ondes de surface via un transducteur interdigité, IDT, puis à détecter ces ondes via un deuxième IDT. L’information sur la présence d’humidité proviendra du fait que les ondes de surface auront, au cours de leur propagation entre IDT émetteur et l’IDT récepteur, été perturbées par la présence d’un revêtement sensible à l’humidité. Les avantages attendus pour ce type de capteurs sont notamment une forte sensibilité et une immunité à la présence d’eau sous forme liquide au cours du processus de séchage.
La capacité d'un revêtement polymère poreux ou d’un oxyde pour détecter l'humidité est basée sur l'adsorption d'eau. La présence d'une couche adsorbant l'humidité à la surface réduit l'impédance totale de la couche due à l'augmentation de la conductivité ionique, et augmente la capacité due à la haute constante diélectrique de l'eau. Elle atténue l’amplitude et procure un retard sur le temps de vol des ondes acoustiques de surface. Le retard sur le temps de vol des ondes de surface et sur leur atténuation de l’amplitude ont plusieurs origines dont notamment la prise de masse de la couche en présence d’humidité, la modification des propriétés élastiques de la couche sensible et la perturbation du champ électrique entre émetteur et récepteur. En général, les polymères hydrophiles microporeux sont les meilleurs matériaux pour des applications dans des capteurs d’humidité de type résistance ou impédance à température ambiante [4, 5]. L’alcool polyvinylique (PVA) qui possède un groupement OH sur chaque atome de carbone de sa chaîne squelettique est largement utilisé comme couche hygroscopique notamment en résonance acoustique. Penza et Cassano [6] ont déposé une couche de PVA sur un substrat de quartz et ont pu détecter une gamme de 20 à 80% d’humidité relative en suivant la résonance acoustique en fonction de l’humidité relative. Tang et al. [7] ont étudié un capteur basé aussi sur la résonance acoustique avec une couche de silice synthétisée par voie Sol-Gel mais la plage de sensibilité n’est que de 30% à 93% de RH à 25°C. Toutefois, compte tenu des hautes températures à prendre en compte, nous avons testé une couche d’oxyde de silice sur substrat de niobate de lithium avec des électrodes interdigitées en or.
Le système de mesure de l'humidité relative est composé de deux capteurs SAW: un premier capteur SAW sur lequel est déposée une couche sensible à l'humidité (silice) et d’un second capteur SAW, dit de référence, sur lequel est déposée une couche de PTFE, téflon (insensible à l’humidité).
Les capteurs SAW sont constitués de deux transducteurs interdigités qui font face (émetteur-récepteur). Ces transducteurs sont constitués d’un substrat piézoélectrique de niobate de lithium et d’électrodes interdigités en or. La largeur de chaque doigt d’électrode et l’écart entre les doigts est de 33μm. Cela permet d’obtenir une fréquence centrale de fonctionnement des deux transducteurs (émetteur-récepteur) aux alentours de 30MHz (voir Figure 1).
Figure 1. Schéma d’un capteur SAW
Concernant la couche d’oxyde, les nanoparticules de silice ont été préparées par hydrolyse et condensation de TEOS dans l’éthanol et en présence d’ammoniac comme catalyseur [8]. Tout d’abord une solution contenant des quantités appropriées d’éthanol absolu, d’ammoniac (32%) et d’eau distillée a été agitée pendant cinq minutes pour assurer un mélange homogène. Ensuite une quantité appropriée de TEOS est mélangée avec de l’éthanol et ajoutée à la solution (Table 1). Le volume de solution de départ est ensuite ajusté avec de l’éthanol absolu et les réactions d’hydrolyse et de condensation se sont déroulées à température ambiante pendant 24 h.
Table 1. Paramètre de synthèse du sol de silice
|
Réactifs |
H2O |
NH3 |
TEOS |
|
Concentration (M) |
1 |
0,2 |
0,2 |
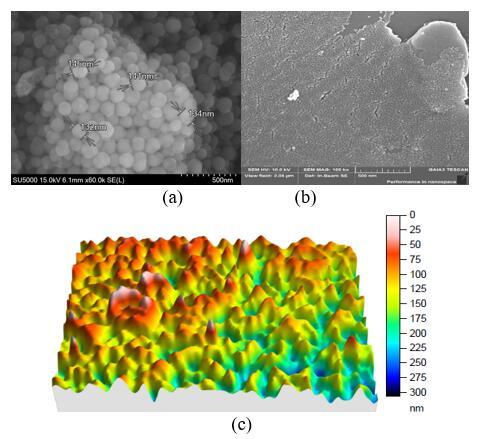
Figure 2. Caractérisation de l’état de surface de la couche de silice: particule de silice synthétisé (a); dépôt de silice (b); observation microscopie confocale (c)
Le Sol ainsi préparé est déposé sur la surface des électrodes ainsi que sur la surface les séparant par "dip-coating". Le capteur revêtu subi ensuite un traitement thermique. L’observation à la microscopie FEG montre que la couche déposée est poreuse et présente des fissurations qui proviennent du recuit et dues à la différence de coefficients de dilatation thermique entre le substrat de niobate de lithium et la silice (voir Figure 2b). Cette couche est constituée de particules sphériques (voir Figure 2a) de taille uniforme (≈150 nm). L’observation de la surface à la microscopie confocale a permis d’observer une rugosité apparente de cette couche de silice mais dont la variation est extrêmement modeste (quelques nm, voir Figure 2c).
Concernant la couche de PTFE, elle est obtenue par pulvérisation d'un aérosol de PTFE du commerce associée à un traitement thermique pour obtenir une couche parfaitement hydrophobe. Ce capteur dit de référence est ainsi parfaitement insensible à l'humidité et nous a permis d'éliminer toute perturbation exogène causée par la manipulation et les changements d'environnement humide. En particulier, les variations de température affectent également la réponse des capteurs car la vitesse de propagation des SAW dans le niobate de lithium est évidemment dépendante de la température.
Le logiciel Matlab® est utilisé pour collecter en temps réel les temps de vol ainsi que les niveaux d’amplitude des deux capteurs SAW en fonction de la prise d’humidité (humidité relative, RH) et de la température.
Le système de détection d'humidité est composé de 4 parties (Figure 3):
(1) La partie I correspond au générateur de signaux à partir duquel une excitation de type burst est appliquée aux capteurs SAW. Cette excitation est constituée de 25 cycles sinusoïdaux avec une fréquence de 30 MHz et une amplitude de 10 Vpp, comme indiqué sur la Figure 4 (a).
(2) La partie II correspond aux 2 capteurs SAW.
(3) La partie III est constituée d’une chambre climatique (Votsch, VC 4034) permettant de contrôler l’humidité relative et la température. Enfin la partie (IV) correspond au système d'enregistrement de données constitué d'un oscilloscope et d'un ordinateur.
Figure 3. Chaîne de mesure; I: Générateur de fonction; II: Capteurs SAW; III Chambre climatique; IV: Système d’enregistrement des données
La synchronisation des deux signaux issus des deux capteurs SAW sur l’oscilloscope a permis par la suite de suivre d’une part les variations d’amplitude relative entre les deux capteurs (Figure 4(b)) et le retard sur le temps de vol du capteur référence, insensible à l’humidité, par rapport au capteur d’humidité (Figure 4(c)), en fonction de la prise d’humidité de la couche via un programme.
Figure 4. Système de détection de l’humidité relative; (a): Excitation burst; (b): Synchronisation des signaux; (c): paramètres suivis en fonction de la prise d’humidité
4.1 Sensibilité
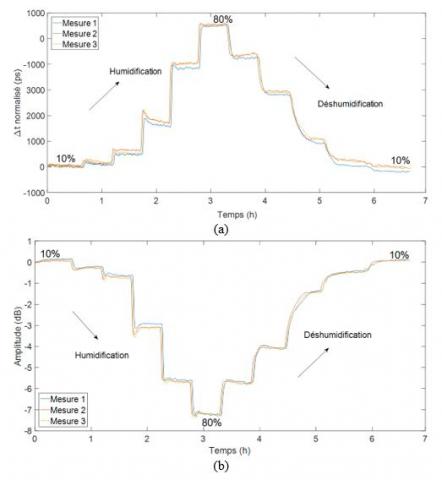
Afin de quantifier la gamme de sensibilité, nous avons réalisé trois mesures sur toute la gamme permise par la chambre climatique, de 10% à 97%. Ces mesures ont été réalisées à une température fixe de 30°C (Figure 5).
La prise d’humidité procure ainsi un retard sur le temps de vol et absorbe l’énergie de surface des ondes acoustiques. La sensibilité (S) de ces deux paramètres est définie comme suit:
$S=\frac{\left(\Delta t_{R H m a x}-\Delta t_{R H m i n}\right)}{R H_{m a x}-R H_{m i n}}$ (1)
Les sensibilités obtenues sont 43 ps/1%RH et 0,06 dB/1%RH suivant le retard sur le temps de vol et l’amplitude respectivement.
Figure 5. Plage de sensibilité des capteurs: retard sur le temps de vol (a) et amplitude (b)
Figure 6. Répétabilité: retard sur le temps de vol (a) et amplitude (b)
4.2 Répétabilité, calibration et hystérésis
Afin d’étudier la répétabilité des mesures, trois cycles en adsorption et désorption ont été réalisés sur toute la plage de sensibilité avec un pas de 15% (Figure 6). Nous avons également réalisé les trois cycles avec un pas de 10% dans le but de rendre les courbes de calibrage et d’hystérésis plus fiables. Les temps de mesure ont été maintenus à 30 min pour chaque taux d’humidité relative pour garantir à la fois la stabilité du niveau de l’humidité relative dans la chambre climatique et par conséquent la valeur du paramètre suivi.
Nous avons estimé la précision des mesures avec le calcul de l’écart type avec la formule suivante:
$\sigma_{n-1}=\frac{\sqrt{\sum_{i=1}^{3}\left(x_{i}-\bar{x}\right)}}{n-1}$ (2)
avec:
Les sensibilités ainsi que les cycles d’hystérésis sont représentés sur la Figure 7.
Figure 7. Sensibilités et hystérésis du capteur SAW: sensibilité et hystérésis avec la mesure du retard sur le temps de vol (a) et sensibilité et hystérésis avec la mesure sur l’amplitude
Nous avons aussi estimé l’écart type relatif (σr) qui est le paramètre le plus efficace pour exprimer la précision et la reproductibilité de la mesure [9].
$\sigma_{\mathrm{r}}=\frac{\sigma_{\mathrm{n}-1}}{\overline{\mathrm{x}}} * 100$ (3)
Nous avons également quantifié l’hystérésis (γ) qui est égale à:
$\gamma=\pm \frac{\Delta\left(\Delta \mathrm{t}_{\mathrm{RH}}\right) * 100}{\Delta \mathrm{t}_{\mathrm{RH} \max }-\Delta \mathrm{t}_{\mathrm{RH} \min }}$ (4)
avec:
Les valeurs de répétabilité et d’hystérésis obtenues montrent que le suivi du retard sur le temps de vol en fonction de la prise d’humidité est plus précis que l’amplitude. En effet, la moyenne de l’écart type relatif sur toute la plage de mesure est de 0,71% et 16% pour le retard sur le temps de vol et l’amplitude respectivement. La moyenne de l’hystérésis est quasiment la même suivant les deux paramètres (≈11%).
Cette hystérésis traduit une difficulté à la perte d’eau (déshumidification) liée à la couche de silice. Cela peut être due fondamentalement à divers phénomènes tels que la cinétique de désorption, l’effet de couche gazeuse statique à la surface, l’effet hydrodynamique ou alors des interactions capillaires entre les fissures de la couche de silice (voir Figure 2 b) et les molécules d’eau.
4.3 Temps de réponse et de récupération des capteurs
Parmi les caractéristiques d’un capteur (hystérésis, sensibilité, plage de mesure) le temps de réponse est un facteur à prendre en grande considération. En effet, le temps de réponse permet de suivre l’évolution temporelle de la réponse du capteur.
Ce temps de réponse sert à quantifier la rapidité du capteur; c’est-à-dire son aptitude à suivre les variations de l’humidité relative. Un temps de réponse nul signifie que le capteur serait capable de suivre instantanément les variations de l’humidité relative. Ce n’est jamais le cas ! Il s’ensuit un régime transitoire dont il convient de connaître la durée, c’est-à-dire son temps de réponse.
Figure 8. Temps de réponse et de récupération: retard sur le temps de vol (a); amplitude (b)
Pour déterminer le temps de réponse, de brusques variations de l’humidité relative, appelées échelons, sont imposées entre 10% et 97% d’humidité relative à 30°C. Ceux-ci peuvent être montants ou descendants. En sortie, la réponse (Dt ou amplitude) du capteur ne s’établit que progressivement. Ainsi le temps de réponse correspond généralement à la durée qui s’écoule après une variation brusque de l’humidité relative (échelon de 97% de RH) jusqu’à ce que la variation de la sortie du capteur (retard sur le temps de vol ou amplitude) ne diffère plus que de e% de la valeur finale. A l’inverse, le temps de récupération correspond au temps s’écoulant après une brusque variation de l’humidité relative (10% de RH) jusqu’à ce que la variation de la sortie du capteur (retard sur le temps de vol ou amplitude ne diffère plus que de e% de la valeur finale. Les temps de réponse et de récupération sont généralement déterminés respectivement entre 10% à 90% et 90% à 10% de la variation finale, d’où e=10% [5, 9, 10].
La Figure 8 représente les temps de réponse et de récupération suivant le retard sur le temps de vol et l’amplitude.
Les temps de monté et de décente de la chambre climatique entre 10% et 97% sont 130 s et 150 s respectivement. Ainsi après avoir retranché ces temps, les temps de réponse et de récupération sont environ 40 s et 120 s respectivement suivant le retard sur le temps de vol. Ces temps de réponse et de récupération sont environ 50 s et 130 s respectivement suivant l’amplitude. La réponse du capteur est légèrement plus rapide suivant le retard sur le temps de vol par rapport à l’amplitude.
Dans cette étude, nous avons développé des capteurs d’humidité ultrasonores à ondes acoustiques de surface basés sur des transducteurs interdigités (IDT). Ces capteurs ont été fonctionnalisés avec une couche hygroscopique de silice synthétisée par voie Sol-Gel. Le système de mesure de l'humidité relative était composé de deux capteurs SAW: un premier capteur SAW sur lequel a été déposée une couche sensible à l'humidité (silice) et d’un second capteur SAW, dit de référence, sur lequel a été déposée une couche de PTFE, téflon (insensible à l’humidité).
Les retards sur le temps de vol ainsi que les niveaux de l’amplitude entre ces deux capteurs SAW sont suivis en fonction de l’humidité relative. Nous avons ainsi observé une sensibilité dans la plage de 10% à 97% d’humidité relative à 30°C. Les sensibilités obtenues ont été de 43 ps/1%RH et 0,06 dB/1%RH pour le suivi du retard sur le temps de vol et le suivi de l’amplitude respectivement. L’écart type relatif montre que le suivi du retard sur le temps de vol en fonction de RH est plus précis que l’amplitude. L’hystérésis du capteur est de 11% en moyenne. Les temps de réponse et de récupération suivant le retard sur le temps de vol sont 40 s et 120 s respectivement.
Nous poursuivons actuellement nos investigations car premièrement les capteurs SAW doivent encore être calibrés sur toute la gamme de température auxquelles ils sont destinés et deuxièmement des tests dans le béton doivent confirmer leur sensibilité in situ.
The authors would like to thank the Hauts de France Regional Council and the European Union (FEDER funds) for their support through the CPER and the interreg V "CUBISM" program. This work was also supported by the French RENATECH network.
[1] Amin, M.N., Hossain, M.A., Roy, K.C. (2004). Effects of moisture content on some physical properties of lentil seeds. Journal of Food Engineering, 65(1): 83-87. https://doi.org/10.1016/j.jfoodeng.2003.12.006
[2] Bai, H., Shi, G. (2007). Gas sensors based on conducting polymers. Sensors, 7(3): 267-307. https://doi.org/10.3390/s7030267
[3] Blank, T.A., Eksperiandova, L.P., Belikov, K.N. (2016). Recent trends of ceramic humidity sensors development: A review. Sensors and Actuators B: Chemical, 228: 416-442. https://doi.org/10.1016/j.snb.2016.01.015
[4] Casalbore-Miceli, G., Camaioni, N., Li, Y., Martelli, A., Yang, M.J., Zanelli, A. (2005). Water sorption in polymer electrolytes: kinetics of the conductance variation. Sensors and Actuators B: Chemical, 105(2): 351-359. https://doi.org/10.1016/j.snb.2004.04.123
[5] Choi, K.H., Sajid, M., Aziz, S., Yang, B.S. (2015). Wide range high speed relative humidity sensor based on PEDOT: PSS–PVA composite on an IDT printed on piezoelectric substrate. Sensors and Actuators A: Physical, 228: 40-49. https://doi.org/10.1016/j.sna.2015.03.003
[6] Penza, M., Cassano, G. (2000). Relative humidity sensing by PVA-coated dual resonator SAW oscillator. Sensors and Actuators B: Chemical, 68(1-3): 300-306. https://doi.org/10.1016/S0925-4005(00)00448-2
[7] Tang, Y., Li, Z., Ma, J., Wang, L., Yang, J., Du, B., Zu, X. (2015). Highly sensitive surface acoustic wave (SAW) humidity sensors based on solgel SiO2 films: Investigations on the sensing property and mechanism. Sensors and Actuators B: Chemical, 215: 283-291. https://doi.org/10.1016/j.snb.2015.03.069
[8] Stöber, W., Fink, A., Bohn, E. (1968). Controlled growth of monodisperse silica spheres in the micron size range. Journal of Colloid and Interface Science, 26(1): 62-69. https://doi.org/10.1016/0021-9797(68)90272-5
[9] Wang, Z., Song, C., Yin, H., Zhang, J. (2015). Capacitive humidity sensors based on zinc oxide nanorods grown on silicon nanowires arrays at room temperature. Sensors and Actuators A: Physical, 235: 234-239. https://doi.org/10.1016/j.sna.2015.10.020
[10] Islam, T., Khan, A.U., Akhtar, J., Rahman, M.Z.U. (2014). A digital hygrometer for trace moisture measurement. IEEE Transactions on Industrial Electronics, 61(10): 5599-5605. https://doi.org/10.1109/TIE.2013.2297295